原理圖:
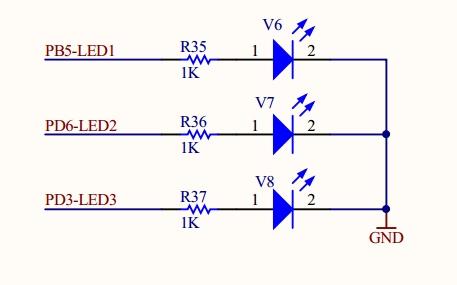 調PB5的亮度
調PB5的亮度
頭文件及完整例程下載:http://www.zg4o1577.cn/f/stm32標準例程庫函數.rar
程序分析:
int main(void)
{
unsigned char a=0;
TIM_OCInitTypeDef TIM3_OCInitStructure;
RCC_Configuration();
time_ini();
SysTick_Config(72000); //配置SYSTICK時鐘節拍為1ms一次
while(1){
Delay(1); //延時1ms
TIM3_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM2; //PWM模式2
TIM3_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //輸出禁止
TIM3_OCInitStructure.TIM_Pulse = CCR2_Val; //確定占空比
TIM3_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_Low;
TIM_OC2Init(TIM3, &TIM3_OCInitStructure);
/*調整CCR2_Val的值來改變占空比,逐步的控制LED1的亮度, 占空比大過一定值時,
亮度的變化就不明顯了,所以CCR2_VAL最大設定到17000*/
if(a==0) CCR2_Val=CCR2_Val+10;
else CCR2_Val=CCR2_Val-10;
if(CCR2_Val>17000){ CCR2_Val=17000; a=1;}
else if(CCR2_Val<200){ CCR2_Val=200; a=0;}
}
}
時鐘初始化打開RCC_APB2Periph_AFIO ,RCC_APB2Periph_GPIOA | RCC_APB2Periph_GPIOB | RCC_APB2Periph_GPIOCD| RCC_APB2Periph_GPIOD| RCC_APB2Periph_GPIOE
void RCC_Configuration(void){
SystemInit();
RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO, ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA | RCC_APB2Periph_GPIOB | RCC_APB2Periph_GPIOC
| RCC_APB2Periph_GPIOD| RCC_APB2Periph_GPIOE , ENABLE);
}
配置初始化,初始化PB5為復用輸出,TIM3部分映射到PB5,設置PWM的時鐘為72M/(3*2400)=10K,初始化TIM3時鐘,
占空比為CCR2_Val /(TIM_Period +1)
void time_ini(void){
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_5; //PB5復用為TIM3的通道2
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure);
/*TIM3局部復用功能開啟 在TIM3的局部復用開啟時,PB5會被復用為TIM3_CH2*/
GPIO_PinRemapConfig(GPIO_PartialRemap_TIM3 , ENABLE); //TIM3部分映射到PB5
/*-------------------------------------------------------------------
TIM3CLK=72MHz 預分頻系數Prescaler=2 經過分頻 定時器時鐘為24MHz
根據公式 通道輸出占空比=TIM3_CCR2/(TIM_Period+1),可以得到TIM_Pulse的計數值
捕獲/比較寄存器2 TIM3_CCR2= CCR2_Val
-------------------------------------------------------------------*/
TIM3_TimeBaseStructure.TIM_Prescaler = 2; //預分頻器TIM3_PSC=3 24M
TIM3_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //計數器向上計數模式 TIM3_CR1[4]=0
TIM3_TimeBaseStructure.TIM_Period =2399; //自動重裝載寄存器TIM3_APR 確定頻率為10KHz
TIM3_TimeBaseStructure.TIM_ClockDivision = 0x0; //時鐘分頻因子 TIM3_CR1[9:8]=00
TIM3_TimeBaseStructure.TIM_RepetitionCounter = 0x0;
TIM_TimeBaseInit(TIM3,&TIM3_TimeBaseStructure); //寫TIM3各寄存器參數
TIM3_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM2; //PWM模式2 TIM3_CCMR1[14:12]=111 在向上計數時,
//一旦TIMx_CNT<TIMx_CCR1時通道1為無效電平,否則為有效電平
TIM3_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //輸入/捕獲2輸出允許 OC2信號輸出到對應的輸出引腳PB5
TIM3_OCInitStructure.TIM_Pulse = CCR2_Val; //確定占空比,這個值決定了有效電平的時間。
TIM3_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_Low; //輸出極性 低電平有效 TIM3_CCER[5]=1;
TIM_OC2Init(TIM3, &TIM3_OCInitStructure);
TIM_OC2PreloadConfig(TIM3, TIM_OCPreload_Enable);
TIM_Cmd(TIM3,ENABLE); //啟動定時器3 TIM3_CR1[0]=1;
}
SysTick_Config(72000); //配置SYSTICK時鐘節拍為1ms一次
while(1){
Delay(1); //延時1ms
TIM3_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM2; //PWM模式2
TIM3_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //輸出禁止
TIM3_OCInitStructure.TIM_Pulse = CCR2_Val; //確定占空比
TIM3_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_Low;
TIM_OC2Init(TIM3, &TIM3_OCInitStructure);
/*調整CCR2_Val的值來改變占空比,逐步的控制LED1的亮度, 占空比大過一定值時,
亮度的變化就不明顯了,所以CCR2_VAL最大設定到17000*/
if(a==0) CCR2_Val=CCR2_Val+10;
else CCR2_Val=CCR2_Val-10;
if(CCR2_Val>17000){ CCR2_Val=17000; a=1;}
else if(CCR2_Val<200){ CCR2_Val=200; a=0;}
} 
