
���M(j��n)늙C(j��)�ǙC(j��)늿�����һ�N���õĈ�(zh��)�ЙC(j��)��(g��u)��������;�nj���}�_�D(zhu��n)�����λ�ƣ�ͨ���f(shu��)����(d��ng)���M(j��n)�(q��)��(d��ng)�����յ�һ��(g��)�}�_��̖(h��o)�������(q��)��(d��ng)���M(j��n)늙C(j��)���O(sh��)���ķ����D(zhu��n)��(d��ng)һ��(g��)�̶��ĽǶȣ������M(j��n)�ǣ���ͨ�^(gu��)�����}�_��(g��)��(sh��)�����Կ��ƽ�λ�������Ķ��_(d��)����(zh��n)�_��λ��Ŀ�ģ�ͬ�r(sh��)ͨ�^(gu��)�����}�_�l�ʁ�(l��i)����늙C(j��)�D(zhu��n)��(d��ng)���ٶȺͼ��ٶȣ��Ķ��_(d��)���{(di��o)�ٵ�Ŀ�ġ�
T89C2051��Ƭ�C(j��)�(q��)��(d��ng)���M(j��n)늙C(j��)���·��Դ�a
����
stepper.c
stepper.hex
/*
* STEPPER.C
* sweeping stepper''s rotor cw and cww 400 steps
* Copyright (c) 1999 by W.Sirichote
*/
#include c:\mc51\8051io.h /* include i/o header file */
#include c:\mc51\8051reg.h
register unsigned char j,flag1,temp;
register unsigned int cw_n,ccw_n;
unsigned char step[8]={0x80,0xc0,0x40,0x60,0x20,0x30,0x10,0x90}
#define n 400
/* flag1 mask byte
0x01 run cw()
0x02 run ccw()
*/
main()
{
flag1=0;
serinit(9600);
dISAble(); /* no need timer interrupt */
cw_n = n; /* initial step number for cw */
flag1 |=0x01; /* initial enable cw() */
while(1){
{
tick_wait(); /* wait for 10ms elapsed */
energize(); /* round-robin execution the following tasks every 10ms */
cw();
ccw();
}
}
}
cw(){
if((flag1&0x01)!=0)
{
cw_n--; /* decrement cw step number */
if (cw_n !=0)
j++; /* if not zero increment index j */
else
{flag1&=~0x01; /* dISAble cw() execution */
ccw_n = n; /* reload step number to ccw counter */
flag1 |=0x02; /* enable cww() execution */
}
}
}
ccw(){
if((flag1&0x02)!=0)
{
ccw_n--; /* decremnent ccw step number */
if (ccw_n !=0)
j--; /* if not zero decrement index j */
else
{flag1&=~0x02; /* dISAble ccw() execution */
cw_n = n; /* reload step number to cw counter */
flag1 |=0x01; /* enable cw() execution */
}
}
}
tick_wait(){ /* cputick was replaced by simpler ASM code 10ms wait */
asm" JNB TCON.5,*"; /* wait for TF0 set */
asm" CLR TCON.5"; /* clear TF0 for further set */
asm" ORL TH0,#$DC"; /* reload TH0 with $DC, TL0 = 0 */
}
energize(){
P1 = step[(j&0x07)]; /* only step 0-7 needed */
}
һ�����M(j��n)늙C(j��)���R(sh��)
��Ҋ�IJ��M(j��n)늙C(j��)�����N������ʽ��PM��������(y��ng)ʽ��VR���ͻ��ʽ��HB��������ʽ���M(j��n)һ�����࣬�D(zhu��n)�غ��w�e�^С�����M(j��n)��һ���7.5�� ��15�ȣ�����(y��ng)ʽ���M(j��n)һ������࣬�Ɍ�(sh��)�F(xi��n)���D(zhu��n)��ݔ�������M(j��n)��һ���1.5�ȣ����������(d��ng)���ܴ��ښW���Ȱl(f��)�_(d��)��(gu��)��80����ѱ���̭�����ʽ���M(j��n)��ָ���������ʽ�ͷ���(y��ng)ʽ�ă�(y��u)�c(di��n)�����ַ֞��������ࣺ���ಽ�M(j��n)��һ���1.8�ȶ����ಽ�M(j��n)��һ��� 0.72�ȡ��@�N���M(j��n)늙C(j��)�đ�(y��ng)�����V����
��������ʽ���M(j��n)늙C(j��)�Ŀ���
��������Ӑۺ��ߘI(y��)�������г��õ�����ʽ���M(j��n)늙C(j��)��������(l��i)��B����Æ�Ƭ�C(j��)���Ʋ��M(j��n)늙C(j��)��
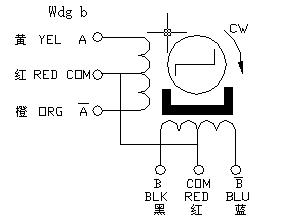
�D1��35BY�����Ų��M(j��n)늙C(j��)�����ΈD���D2��ԓ늙C(j��)�ĽӾ��D���ĈD�п��Կ�����늙C(j��)�����ĽM��Ȧ���ĽM��Ȧ��һ��(g��)���c(di��n)�B��һ���������@��һ����5����������Ҫʹ�ò��M(j��n)늙C(j��)�D(zhu��n)��(d��ng)��ֻҪ݆���o��������ͨ늼��ɡ���COM�˘�(bi��o)�R(sh��)��C��ֻҪAC�� C��BC�� C��݆����늾����(q��)��(d��ng)���M(j��n)늙C(j��)�\(y��n)�D(zhu��n)����늵ķ�ʽ�����ж�N�������COM�˽����Դ����ôֻҪ���_�P(gu��n)Ԫ���������O�ܣ�����A�� ��B�� ݆���ӵء�
�±��г���ԓ늙C(j��)��һЩ���ͅ���(sh��)��
��1��35BY48S03�Ͳ��C(j��)늙C(j��)����(sh��)
��̖(h��o) ����� ����(sh��) 늉� ��� ��� ����o�D(zhu��n)�� ��λ�D(zhu��n)�� �D(zhu��n)��(d��ng)�T��
35BY48S03 7.5 4 12 0.26 47 180 65 2.5
�����@Щ����(sh��)�����y�O(sh��)Ӌ(j��)�������·�����乤��늉���12V����������0.26A�������һ�K�_·ݔ���_(d��)���D�(q��)��(d��ng)����ULN2003����(l��i)�����(q��)��(d��ng)��ͨ�^(gu��) P1.4~P1.7��(l��i)���Ƹ���Ȧ�Ľ�ͨ�c�Д࣬�·��D3��ʾ���_�C(j��)�r(sh��)��P1.4~P1.7������ƽ�����Ό�P1.4~P1.7�ГQ����ƽ�����(q��)��(d��ng)���M(j��n)늙C(j��)�\(y��n)�У�ע�����ГQ֮ǰ��ǰһ��(g��)ݔ�����_׃?y��u)���ƽ�����Ҫ��׃늙C(j��)���D(zhu��n)��(d��ng)�ٶ�ֻҪ��׃�ɴν�֮ͨ�g�ĕr(sh��)�g����Ҫ��׃늙C(j��)���D(zhu��n)��(d��ng)����ֻҪ��׃����Ȧ��ͨ�����

�D1��35BY48S03�Ͳ��M(j��n)늙C(j��)���ΈD
�D2��35BY48S03�Ͳ��M(j��n)늙C(j��)�ĽӾ��D
�D3����Ƭ�C(j��)����35BY48S03�Ͳ��M(j��n)늙C(j��)���·ԭ��D
�������M(j��n)늙C(j��)���(q��)��(d��ng)��(sh��)��
Ҫ�����·��D3��ʾ���_�C(j��)��늙C(j��)���D(zhu��n)��������(d��ng)�I��늙C(j��)���D(zhu��n)���ٶȞ�25�D(zhu��n)/�֣����¼�1�I���ٶ����ӣ����p1�I���ٶȽ��ͣ�����ٶȞ�100�D(zhu��n)/�֣�����D(zhu��n)����25�D(zhu��n)/�֣�����ֹͣ�I��늙C(j��)ͣ�D(zhu��n)���ٶ�ֵҪ���ڔ�(sh��)�a�����@ʾ����(l��i)��
1��Ҫ�����
������ķ�������׃�D(zhu��n)�٣�ֻҪ��׃P1.0~P1.3݆��׃���ƽ�ĕr(sh��)�g�����_(d��)��Ҫ���@��(g��)�r(sh��)�g����(y��ng)�����ӕr(sh��)��(l��i)��(sh��)�F(xi��n)����?y��n)�?hu��)Ӱ푵��������ܵČ�(sh��)�F(xi��n)���@���Զ��r(sh��)�ķ�ʽ��(l��i)��(sh��)�F(xi��n)����������Ӌ(j��)��һ�¶��r(sh��)�r(sh��)�g��
��Ҫ������D(zhu��n)�ٞ�25�D(zhu��n)/�֣����������M(j��n)늙C(j��)�IJ���Ǟ�7.5����ÿ48��(g��)�}�_��1�ܣ���������D(zhu��n)�ٕr(sh��)��Ҫ���1200�}�_/�֣��ஔ(d��ng)��50ms/�}�_����������D(zhu��n)�ٕr(sh��)��Ҫ���100�D(zhu��n)/�֣���48000�}�_/�֣��ஔ(d��ng)��12.5ms/�}�_�������г��±�
��1�����M(j��n)늙C(j��)�D(zhu��n)���c���r(sh��)�����r(sh��)����(sh��)�P(gu��n)ϵ
�ٶ� �β��r(sh��)�g(us) TH1 TL1 ��(sh��)�H���r(sh��)��us��
25 50000 76 0 49996.8
26 48077 82 236 48074.18
27 46296 89 86 46292.61
28 44643 95 73 44640.155
�� �� �� �� ��
100 12500 211 0 12499.2
���в��HӋ(j��)�����TH1��TL1������߀Ӌ(j��)��������@��(g��)���r(sh��)����(sh��)�£��挍(sh��)�Ķ��r(sh��)�r(sh��)�g�����Ը���(j��)�@��(g��)Ӌ(j��)��ֵ��(l��i)�����挍(sh��)�ٶ��c��Փ�ٶȵ��`��ֵ��
����TH1��TL1�Ǹ���(j��)���r(sh��)�r(sh��)�g�����(l��i)�Ķ��r(sh��)��ֵ���@���õ��ľ�����11.0592M����������������Ͳ��y��(sh��)�F(xi��n)�ˣ�ʹ�ö��r(sh��)/Ӌ(j��)��(sh��)��T1�鶨�r(sh��)�������r(sh��)�r(sh��)�g�����ГQݔ���_���ɡ�
2������?q��)��F(xi��n)
���xDSB��1A��(sh��)�(y��n)���S1�醢��(d��ng)�I��S2��ֹͣ�I��S3���1�I��S4��p1�I���������£�
StartEnd bit 01H ;����(d��ng)��ֹͣ��(bi��o)־
MinSpd EQU 25 ;��ʼ�D(zhu��n)��(d��ng)�ٶ�
MaxSpd EQU 100 ;����D(zhu��n)��(d��ng)�ٶ�
Speed DATA 23H ;����(d��ng)�ٶ�Ӌ(j��)��(sh��)
DjCount DATA 24H ;����늙C(j��)ݔ����һ��(g��)ֵ����ʼ��11110 111
Hidden EQU 10H ;���[�a
Counter DATA 57H ;�@ʾӋ(j��)��(sh��)��
DISPBUF DATA 58H ;�@ʾ���_�^(q��)
ORG 0000H
AJMP MAIN
ORG 000BH
JMP DISP
ORG 001BH
JMP DJZD
ORG 30H
MAIN:
MOV SP,#5FH
MOV P1,#0FFH
MOV A,#Hidden
MOV DispBuf,A
MOV DispBuf+1,A
MOV DispBuf+2,A
MOV DjCount,#11110111B
MOV SPEED,#MinSpd ;��ʼ�D(zhu��n)��(d��ng)�ٶ�����Ӌ(j��)��(sh��)��
CLR StartEnd ;ͣ�D(zhu��n)��B(t��i)
MOV TMOD,#00010001B ;
MOV TH0,#HIGH(65536-3000)
MOV TL0,#LOW(65536-3000)
MOV TH1,#0FFH;
MOV TL1,#0FFH
SETB TR0
SETB EA
SETB ET0
SETB ET1
LOOP: ACALL KEY ;�I�P����
JNB F0,m_NEXT1 ;�o(w��)�I�^�m(x��)
ACALL KEYPROC ;��t�{(di��o)���I�P̎������
m_NEXT1:
MOV A,Speed
MOV B,#10
DIV AB
MOV DispBuf+5,B ;���λ
MOV B,#10
DIV AB
MOV DispBuf+4,B
MOV DispBuf+3,A
JB StartEnd,m_Next2
CLR TR1 ;�P(gu��n)�]늙C(j��)
JMP LOOP
ORL P1,#11110000B
m_Next2:
SETB TR1 ;����(d��ng)늙C(j��)
AJMP LOOP ;������Y(ji��)��
;---------------------------------------
D10ms:
����
;---------�ӕr(sh��)����,�I�P̎�����{(di��o)��
KEYPROC:
MOV A,B ;�@ȡ�Iֵ
JB ACC.2,StartStop ;�����I�Ĵ��a,ijλ������,�tԓλ��1
JB ACC.3,KeySty
JB ACC.4,UpSpd
JB ACC.5,DowSpd
AJMP KEY_RET
StartStop:
SETB StartEnd ;����(d��ng)
AJMP KEY_RET
KeySty:
CLR StartEnd; ;ֹͣ
AJMP KEY_RET
UpSpd:
INC SPEED;
MOV A,SPEED
CJNE A,#MaxSpd,K1 ;�������ĴΔ�(sh��)��
DEC SPEED ;�DŽt�pȥ1�����C�´��Ԟ�ԓֵ
K1:
AJMP KEY_RET
DowSpd:
DEC SPEED
MOV A,SPEED
CJNE A,#MAXSPD,KEY_RET ;���ȣ�δ�����ֵ��������
MOV SPEED,#MinSpd;
KEY_RET:
RET
KEY:
�����@ȡ�Iֵ�ij���
RET
DjZd: ;���r(sh��)��T1����늙C(j��)�D(zhu��n)�ٿ���
PUSH ACC
PUSH PSW
MOV A,Speed
SUBB A,#MinSpd ;�p����(zh��n)��(sh��)
MOV DPTR,#DjH
MOVC A,@A+DPTR
MOV TH1,A
MOV A,Speed
SUBB A,#MinSpd
MOV DPTR,#DjL
MOVC A,@A+DPTR
MOV TL1,A
MOV A,DjCount
CPL A
ORL P1,A
MOV A,DjCount
JNB ACC.7,d_Next1
JMP d_Next2
d_Next1:
MOV DjCount,#11110111B
d_Next2:
MOV A,DjCount
RL A
MOV DjCount,A ;�ش�
ANL P1,A
POP PSW
POP ACC
RETI
DjH: DB 76,82,89,95,100,106,110,115,119,123,12����
DjL: DB 0,236,86,73,212,0,214,96,163,165
����
DISP: ;�@ʾ����
POP PSW
POP ACC
����
RETI
BitTab: DB 7Fh,0BFH,0DFH,0EFH,0F7H,0FBH
DISPTAB:DB 0C0H,0F9H,0A4H,0B0H,99H,92H,82H,0F8H,80H,90H,88H,83H,0C6H,0A1H,86H,8EH,0FFH
END
3���������
��������Ҫ���I�P�����@ʾ�������M(j��n)늙C(j��)�(q��)��(d��ng)���������ݽM�ɣ����������ȳ�ʼ����׃�������@ʾ���ĸ�3λ���[�����M(j��n)늙C(j��)�(q��)��(d��ng)�ĸ����_��ݔ�����ƽ��Ȼ���{(di��o)���I�P�������Д࣬������I���£��t�{(di��o)���I�P̎������tֱ���D(zhu��n)��һ������һ���nj���(d��ng)ǰ���D(zhu��n)��ֵ�D(zhu��n)�Q��BCD�a�������@ʾ���_�^(q��)�������Д� StartEnd�@��(g��)λ׃�����ǡ�1��߀�ǡ�0��������ǡ�1�����t�_�����r(sh��)��T1����t�P(gu��n)�]���r(sh��)��T1�����ֹ�P(gu��n)�]�r(sh��)ijһ�ྀȦ�L(zh��ng)��ͨ늣���ˣ����P(gu��n)�]���r(sh��)��T1�r(sh��)����P1.0~P1.3���øߡ����ˣ�������Ĺ������Y(ji��)�����@��麆(ji��n)����Ҋ���@��]������λ��0�����[�Ĺ�����������ٶȞ�10�D(zhu��n)/�֣��t�@ʾֵ��010�����x�߿������м������P(gu��n)�Ĵ��a��(l��i)̎���@һ������
���M(j��n)늙C(j��)���(q��)��(d��ng)�������ڶ��r(sh��)��T1���Д����(w��)�����Ќ�(sh��)�F(xi��n)�ģ���ǰ��������ÿ�εĶ��r(sh��)�r(sh��)�g���_(d��)�Ժ���Ҫ��P1.0~P1.3���ν�ͨ���̶�������һ��(g��)׃��DjCntr��(l��i)��(sh��)�F(xi��n)�@һ���ܣ����������ʼ���r(sh��)��ԓ׃�����x���ֵ 11110111B���M(j��n)�뵽���r(sh��)�Д��Ժ�ԓ׃��ȡ����ACC�ۼ����������ۼ������M(j��n)�����ƣ��@�ӣ�ԓ��(sh��)ֵ��׃?y��u)?110 1111��Ȼ��ԓ��(sh��)�cP1 �ࡰ�c�����˕r(sh��)��P1.4��ݔ�����ƽ���ڶ����M(j��n)���Д��r(sh��)���Ȍ�ԓ��(sh��)ȡ�����ɞ� 0001��0000��Ȼ��ԓ��(sh��)�cP1�ࡰ���@�ӣ�P1.4��ݔ�����ƽ���P(gu��n)��������(y��ng)�ľ�Ȧ��Ȼ��ԓ��(sh��)����ȡ�����������ƣ�����1110��1111���Ƴɞ�1101��1111����ԓ��(sh��)�cP1�ࡰ�c�����@��P1.5��ݔ�����ƽ��������ƣ�P1.7~P1.4��ѭ�h(hu��n)ݔ�����ƽ����(d��ng)�@һ��(sh��)��(j��)׃?y��u)?111 1111����Ҫ���m��(d��ng)?sh��)ĸĄ?d��ng)������(sh��)��(j��)����׃�ء�1111��0111���M(j��n)�еڶ���ѭ�h(hu��n)�����P(gu��n)���a��Ո(q��ng)�x�����з�����
���r(sh��)�r(sh��)�g������δ_�����أ��@���õ��Dz���ķ�����������ExcelӋ(j��)��ó���ÿһ�N�D(zhu��n)���µ�THֵ��TLֵ��Ȼ�քe����DjH��DjL���У����M(j��n)��T1�Д����֮���ٶ�ֵ׃��Speed�����ۼ���ACC��Ȼ��pȥ����(sh��)25��ʹ�����(sh��)�� 0�_ʼӋ(j��)��(sh��)��Ȼ��քe���������TH1��TL1����(sh��)�F(xi��n)���ö��r(sh��)��ֵ��Ŀ�ġ�
�����@һ���݃�(n��i)���Ժ�Ո(q��ng)�x������������¹�����
1�� ���ij���S1���x�顰����(d��ng)/ֹͣ������S2���x�顰��������S2���ГQ늙C(j��)���D(zhu��n)����
2�� ���ij���Ҫ���D(zhu��n)��?g��u)?��100��
3�� ���ij���(sh��)�F(xi��n)��λ�o(w��)Ч�����[
-----------------------------------------------3--------------------------------------------
���M(j��n)늙C(j��)�Ć�Ƭ�C(j��)����
���ߣ���ͨ ��־��
ժҪ�����O(sh��)Ӌ(j��)�������(y��ng)16 λ��Ƭ�C(j��)SPCE061A��(du��)���M(j��n)늙C(j��)�M(j��n)�п��ƣ�ͨ�^(gu��)IO��ݔ���ľ��Еr(sh��)��ķ������鲽�M(j��n)늙C(j��)�Ŀ�����̖(h��o)����̖(h��o)��(j��ng)�^(gu��)оƬL298N�(q��)��(d��ng)���M(j��n)늙C(j��)��ͬ�r(sh��)���� 4X4���I�P��(l��i)��(du��)늙C(j��)�Ġ�B(t��i)�M(j��n)�п��ƣ����Ô�(sh��)�a���@ʾ늙C(j��)���D(zhu��n)�٣�����74LS164����4λ��(g��)��(sh��)�a�ܵ��@ʾ�(q��)��(d��ng)���Ć�Ƭ�C(j��)ݔ����̖(h��o)���������(y��ng)��Ƭ�C(j��)���Z(y��)�����ܲ���(b��o)늙C(j��)���D(zhu��n)�١�
�P(gu��n)�I�~�� ���M(j��n)늙C(j��) ��Ƭ�C(j��) ��(sh��)�a��
һ�� ����Փ�C�c���^
1�� ���O(sh��)Ӌ(j��)�����c(di��n)���ڌ�(du��)���M(j��n)늙C(j��)�Ŀ��ƺ��(q��)��(d��ng)���O(sh��)Ӌ(j��)���ܿ�늙C(j��)�����������ƵIJ��M(j��n)늙C(j��)����(n��i)��33�W�����M(j��n)1.8�ȣ��~��늉�12V��
����һ��ʹ�ö���(g��)���ʷŴ������(q��)��(d��ng)늙C(j��)
ͨ�^(gu��)ʹ�ò�ͬ�ķŴ��·�Ͳ�ͬ����(sh��)�������������_(d��)����ͬ�ķŴ��Ҫ�Ŵ���܉�õ��^��Ĺ��ʡ���������ʹ�õ�������IJ��M(j��n)늙C(j��)������Ҫ��(du��)��·��̖(h��o)�քe�M(j��n)�зŴ����ڷŴ��·���y������ȫһ�£���(d��ng)늙C(j��)�Ĺ����^��r(sh��)�\(y��n)������(l��i)��(hu��)����(w��n)���������·������Ҳ���^��(f��)�s��
��������ʹ��L298NоƬ�(q��)��(d��ng)늙C(j��)
L298NоƬ�����(q��)��(d��ng)�ɂ�(g��)����늙C(j��)����D1��1����Ҳ�����(q��)��(d��ng)һ��(g��)����늙C(j��)��ݔ��늉���߿��_(d��)50V������ֱ��ͨ�^(gu��)�Դ��(l��i)�{(di��o)��(ji��)ݔ��늉�������ֱ���Æ�Ƭ�C(j��)��IO���ṩ��̖(h��o)�������·��(ji��n)�Σ�ʹ�ñ��^���㡣

�D1��1
ͨ�^(gu��)���^��ʹ��L298NоƬ��ְl(f��)�]�����Ĺ��ܣ��ܷ�(w��n)�����(q��)��(d��ng)���M(j��n)늙C(j��)���҃r(ji��)�ߣ����x��L298N�(q��)��(d��ng)늙C(j��)����ʹ��L298N�r(sh��)��������L297��(l��i)�ṩ�r(sh��)����̖(h��o)�����Թ�(ji��)ʡ��Ƭ�C(j��)IO�ڵ�ʹ�ã�Ҳ����ֱ���Æ�Ƭ�C(j��)ģ�M���r(sh��)����̖(h��o)�����ڿ��Ʋ�����(f��)�s�����x�ú��ߡ�
2�� ��(sh��)�a���@ʾ�·���O(sh��)Ӌ(j��)
����һ�����нӷ�
�O(sh��)Ӌ(j��)��Ҫ�@ʾ4λ��(sh��)�֣���74LS164�����@ʾ�(q��)��(d��ng)�����Ў��i�棬ʹ�ô��нӷ����Թ�(ji��)�sIO���YԴ����Ҫʹ��SIO���l(f��)�͔�(sh��)��(j��)�r(sh��)�����ơ�
�����������нӷ�
ʹ�ò��нӷ��r(sh��)Ҫ��(du��)ÿ��(g��)��(sh��)�a����IO�چΪ�(d��)ݔ�딵(sh��)��(j��)��ռ���YԴ�^�ࡣ
�����O(sh��)Ӌ(j��)����һ�K��Ƭ�C(j��)�M(j��n)�п��ƣ��YԴ���ޣ��x���˷���һ�����⣬ʹ���i��Ҳ��(ji��)�s�YԴ�����á�
�������M(j��n)늙C(j��)����ԭ��
���M(j��n)늙C(j��)�ǔ�(sh��)�ֿ���늙C(j��)�������}�_��̖(h��o)�D(zhu��n)׃�ɽ�λ�ƣ����oһ��(g��)�}�_��̖(h��o)�����M(j��n)늙C(j��)���D(zhu��n)��(d��ng)һ��(g��)�Ƕȣ���˷dz��m���چ�Ƭ�C(j��)���ơ����M(j��n)늙C(j��)�ɷ֞鷴��(y��ng)ʽ���M(j��n)늙C(j��)����(ji��n)�QVR��������ʽ���M(j��n)늙C(j��)����(ji��n)�QPM���ͻ��ʽ���M(j��n)늙C(j��)����(ji��n)�QHB����
���M(j��n)늙C(j��)�^(q��)�e����������늙C(j��)��������c(di��n)�ǣ�����ͨ�^(gu��)ݔ���}�_��̖(h��o)��(l��i)�M(j��n)�п��Ƶģ���늙C(j��)�Ŀ��D(zhu��n)��(d��ng)�Ƕ���ݔ���}�_��(sh��)�Q������늙C(j��)���D(zhu��n)�����}�_��̖(h��o)�l�ʛQ����
���M(j��n)늙C(j��)���(q��)��(d��ng)�·����(j��)������̖(h��o)������������̖(h��o)�Ɇ�Ƭ�C(j��)�a(ch��n)���������ԭ���������£�
(1)���ƓQ�����
ͨ늓Q���@һ�^(gu��)�̷Q���}�_���䡣���磺���ಽ�M(j��n)늙C(j��)�����Ĺ�����ʽ�������ͨ����?y��n)�A-B-C��D,ͨ늿����}�_��횇�(y��n)�����@һ���քe����A,B,C��D���ͨ�ࡣ
(2)���Ʋ��M(j��n)늙C(j��)���D(zhu��n)��
����o��������ʽ����Q��ͨ늣����M(j��n)늙C(j��)���D(zhu��n)�����������ͨ늓Q�࣬�t늙C(j��)�ͷ��D(zhu��n)��
(3)���Ʋ��M(j��n)늙C(j��)���ٶ�
����o���M(j��n)늙C(j��)�l(f��)һ��(g��)�����}�_�������D(zhu��n)һ�����ٰl(f��)һ��(g��)�}�_������(hu��)���D(zhu��n)һ�����ɂ�(g��)�}�_���g��Խ�̣����M(j��n)늙C(j��)���D(zhu��n)��Խ�졣�{(di��o)����Ƭ�C(j��)�l(f��)�����}�_�l�ʣ��Ϳ��Ԍ�(du��)���M(j��n)늙C(j��)�M(j��n)���{(di��o)�١�
������Փ�O(sh��)Ӌ(j��)
�C�������xȡ�ķ���������������D3��2��ʾ��

�D3��1
1�����M(j��n)늙C(j��)�(q��)��(d��ng)�·
ͨ�^(gu��)L298N��(g��u)�ɲ��M(j��n)늙C(j��)���(q��)��(d��ng)�·,�·�D��D3��2��ʾ��
ͨ�^(gu��)��Ƭ�C(j��)SPCE061A��IOB8��I(xi��n)OB13��(du��)L298N��IN1��I(xi��n)N4�ں�ENA��ENB�ڰl(f��)�ͷ����}�_��̖(h��o)����r(sh��)��D��D3��3��ʾ��
�D3��2
�D3��3
2����(sh��)�a���@ʾ�·���O(sh��)Ӌ(j��)
��(sh��)�a�ܵ��@ʾ�(q��)��(d��ng)ʹ��74LS164��ͨ�^(gu��)SPCE061A��IOB0��IOB1�ڌ�(du��)DATA��CLK�l(f��)�͔�(sh��)��(j��)��
�D3��4
3��4x4�I�P�·
���O(sh��)Ӌ(j��)�У�ʹ���˘�(bi��o)��(zh��n)��4x4�I�P�����·�D��D3��5��ʾ����Ƭ�C(j��)��A�ڵ�8λ���I�P�Ľӿڡ��M���O(sh��)Ӌ(j��)Ҫ����ֻ��Ҫ4��(g��)�I��(du��)���M(j��n)늙C(j��)�Ġ�B(t��i)�M(j��n)�п��ƣ������]����(du��)���ƹ��ܵĔU(ku��)չ���҂�ʹ����4x4���I�P��

�D3��5
�ġ������O(sh��)Ӌ(j��)
���M(j��n)�г����O(sh��)Ӌ(j��)���^(gu��)���У���Ҫ�֞��傀(g��)���֣��p�C(j��)ͨӍ���Z(y��)���(b��o)��(sh��)����(sh��)���@ʾ�����M(j��n)늙C(j��)�(q��)��(d��ng)���I�P�������p�C(j��)ͨӍ�Č�(sh��)�F(xi��n)���Z(y��)���(b��o)�r(sh��)���^�����c(di��n)���������̺�(ji��n)Ҫ��B���£���������Ҋ���ij���
1���p�C(j��)ͨӍ

�D4��1
�҂�?c��)ڌ?sh��)�F(xi��n)�p�C(j��)ͨӍ���^(gu��)����ʹ���ˡ��������֡��ķ�ʽ���@��Intle�W(w��ng)�г��õĔ�(sh��)��(j��)ͨӍ�_�J(r��n)�f(xi��)�h�������̈D��D4��1��ʾ��
2���Z(y��)���(b��o)��(sh��)
�����O(sh��)Ӌ(j��)���Z(y��)���(b��o)��(sh��)ʹ�õ���SACM��A2000�����]��������^��(ji��n)�Σ�����ʹ�����Ԅ�(d��ng)��(b��o)��(sh��)��ʽ�����l(f��)�F(xi��n)�����M(j��n)���B�m(x��)��(b��o)��(sh��)������ʹ���˷��Ԅ�(d��ng)��ʽ�����̈D��D4��2��ʾ��

�D4��2
�塢�Y(ji��)�������c���Y(ji��)
��(y��ng)ԓ�f(shu��)�@���n���O(sh��)Ӌ(j��)߀�ǻ����_(d��)�����O(sh��)Ӌ(j��)��Ҫ����Ҳ������δ�ܽ�Q�Ć�(w��n)�}�������ڈ�(zh��)���Z(y��)������r(sh��)��(du��)�YԴ�����ı��^�����Z(y��)���(b��o)��(sh��)�ĕr(sh��)���(hu��)�Дಽ�M(j��n)늙C(j��)�(q��)��(d��ng)��̖(h��o)��ݔ������(d��o)��늙C(j��)ͣ�D(zhu��n)����ˣ��҂����˷�����ʹ���˃ɉK��Ƭ�C(j��)��ͨ�^(gu��)�p�C(j��)ͨӍ��(l��i)���f��̖(h��o)���z�����dž�(w��n)�}��Ȼ�]�еõ���Q��
�@�β��M(j��n)늙C(j��)�ľC�ό�(sh��)�(y��n)�҂��W(xu��)���˲��M(j��n)늙C(j��)����(sh��)�a�ܡ�4*4�I�P���Z(y��)���(b��o)��(sh��)���p�C(j��)ͨӍ��ʹ�ã�����Ҫ���njW(xu��)��(hu��)�˳������(w��n)�}�r(sh��)�{(di��o)ԇ�ķ��������B(y��ng)����Debug����(x��)�T���W(xu��)���˳������(w��n)�}������ȥ��Q�Ļ���������