
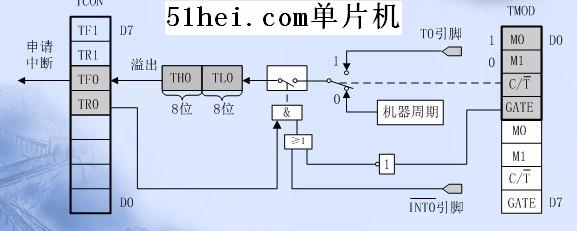
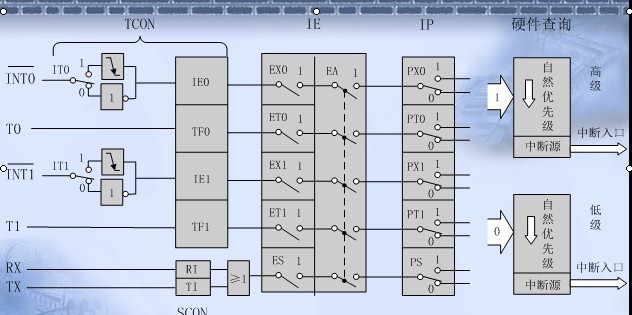
制作好一個電子時鐘時,單片機就差不多學會了80%,這個電子鐘可以顯示時間并且可以調(diào)節(jié)時間的秒,分,時。單片機主要的作用就是定時和中斷,如何充分利用好這兩個方面就是學習的重點。首先介紹下中斷,中斷就是指你在執(zhí)行一個指令的時候突然要執(zhí)行另一個指令時就要先將指令暫停先去執(zhí)行另一個指令,當另一個指令完成時再返回完成中斷前的指令。單片機含有5個中斷,外部中斷0和1,定時器/計數(shù)器中斷0和1,串行口中斷。要執(zhí)行中斷時就要打開總中斷EA,將EA=1(高電平),在數(shù)字電路中1代表高電平,0代表低電平。總中斷開完后,如果要開定時器中斷0的話就輸入ET0=1;再將TR0=1;這就開啟了定時器0的中斷(簡單吧)。中斷條件條件:1,有中斷請求(下面講),開總中斷EA=1,開中斷源中斷(ET0=1)。 關于中斷的詳細解說大家可以查看www.zg4o1577.cn單片機網(wǎng)首頁上的第18課。

}

#include <reg52.h>
#define uchar unsigned char
#define uint unsigned int
sbit dula=P3^7;
sbit wela=P2;
sbit rs=P2^5;
sbit rw=P2^6;
sbit s1=P1^0;
sbit s2=P1^1;
sbit s3=P1^2;
sbit rd=P1^7;
sbit lcden=P2^7;
uchar count,s1num;
char shi,fen,miao;
uchar code table[]=" 2013-4-19 FRI" ;
uchar code table1[]=" 00:00:00";
void delay(uint z) 延時函數(shù) delay(5)就是5ms
{
uint x,y;
for(x=z;x>0;x--)
for(y=110;y>0;y--);
}
void write_com(uchar com)
{
rs=0;
rw=0;
lcden=0;
P0=com;
delay(5);
lcden=1;
delay(5);
lcden=0;
}
void write_data(uchar date)
{
rs=1;
rw=0;
lcden=0;
P0=date;
delay(5);
lcden=1;
delay(5);
lcden=0;
}
void init()
{
uchar num;
dula=0;
lcden=0;
rd=0;
// fen=59;
// miao=53;
// shi=23;
write_com(0x38);
write_com(0x0c);
write_com(0x06);
write_com(0x01);
write_com(0x80);
for(num=0;num<15;num++)
{
write_data(table[num]);
delay(5);
}
write_com(0x80+0x40);
for(num=0;num<11;num++)
{
write_data(table1[num]);
delay(5);
}
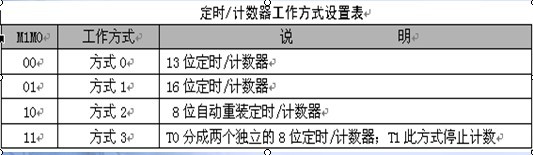
TMOD=0x01;
TH0=0x4c;
TL0=0x00;
EA=1;
ET0=1;
TR0=1;
}
void write_sfm(uchar add,uchar date)
{
uchar shi,ge;
shi=date/10;
ge=date%10;
write_com(0x80+0x40+add);
write_data(0x30+shi);
write_data(0x30+ge);;
}
void keyscan()
{
rd=0;
if(s1==0)
{
delay(5);
if(s1==0)
{
s1num++;
while(!s1);
if(s1num==1)
{ TR0=0;
write_com(0x80+0x40+10);
write_com(0x0f);
}
}
if(s1num==2)
{
write_com(0x80+0x40+7);
}
if(s1num==3)
{
write_com(0x80+0x40+4);
}
if(s1num==4)
{
s1num=0;
write_com(0x0c);
TR0=1;
}
}
if(s1num!=0)
{
if(s2==0)
{
delay(5);
if(s2==0)
{
while(!s2);
if(s1num==1)
{
miao++;
if(miao==60)
miao=0;
write_sfm(10,miao);
write_com(0x80+0x40+10);
}
if(s1num==2)
{
fen++;
if(fen==60)
fen=0;
write_sfm(7,fen);
write_com(0x80+0x40+7);
}
if(s1num==3)
{
shi++;
if(shi==24)
shi=0;
write_sfm(4,shi);
write_com(0x80+0x40+4);
}
}
}
if(s3==0)
{
delay(5);
if(s3==0)
{
while(!s3);
if(s1num==1)
{
miao--;
if(miao==-1)
miao=59;
write_sfm(10,miao);
write_com(0x80+0x40+10);
}
if(s1num==2)
{
fen--;
if(fen==-1)
fen=59;
write_sfm(7,fen);
write_com(0x80+0x40+7);
}
if(s1num==3)
{
shi--;
if(shi==-1)
shi=23;
write_sfm(4,shi);
write_com(0x80+0x40+4);
}
}
}
}
}
void main()
{
init();
while(1)
{
keyscan();
}
}
void timer0() interrupt 1
{
TH0=0x4c;
TL0=0X00;
count++;
if(count==18)
{
count=0;
miao++;
if(miao==60)
{
miao=0;
fen++;
if(fen==60)
{
fen=0;
shi++;
if(shi==24)
{
shi=0;
}
write_sfm(4,shi);
}
write_sfm(7,fen);
}
write_sfm(10,miao);
}
}