
有圖有真相


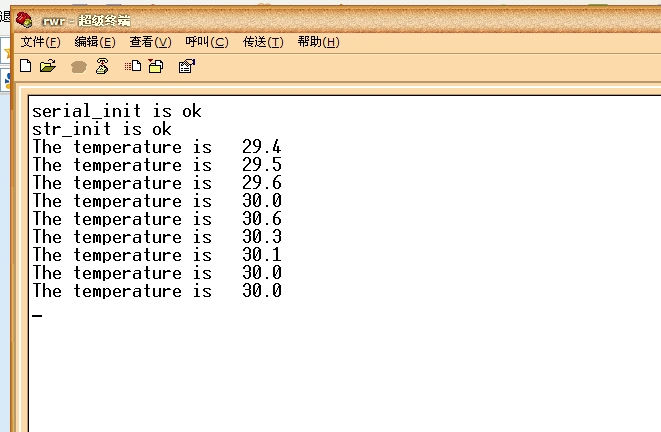
溫度顯示在串口調速器上,此軟件可到 http://www.zg4o1577.cn/mcudown/ 單片機開發實用工具軟件這一欄下載
下面單片機部分的源代碼:
//11.0592晶振
#include <reg51.h>
#define uchar unsigned char
#define uint unsigned int
#define uint unsigned int
code uchar seg[]={0x28,0x7e,0xa2,0x62,0x74,0x61,0x21,0x7a,0x20,0x60}; //數碼管碼表
code uchar tab[]={0x7f,0xbf,0xdf,0xef,0xf7,0xfb,0xfd,0xfe}; //數碼管位選
code uchar tab[]={0x7f,0xbf,0xdf,0xef,0xf7,0xfb,0xfd,0xfe}; //數碼管位選
//sbit k8=P1^7; //按鍵發送溫度值
sbit dec=P0^5; //小數點顯示位
static uint count; //延時發送溫度值變量
void delay(uint k)
{
while(k--);
}
{
while(k--);
}
void show_temp(uint k) //顯示溫度值函數
{
P0=seg[k/100];
P2=tab[2];
delay(30);
P0=0xff;
P2=0xff;
P0=seg[k%100/10];
dec=0; //顯示小數點
P2=tab[1];
delay(30);
P0=0xff;
P2=0xff;
P0=seg[k%10];
P2=tab[0];
delay(30);
P0=0xff;
P2=0xff;
}
{
P0=seg[k/100];
P2=tab[2];
delay(30);
P0=0xff;
P2=0xff;
P0=seg[k%100/10];
dec=0; //顯示小數點
P2=tab[1];
delay(30);
P0=0xff;
P2=0xff;
P0=seg[k%10];
P2=tab[0];
delay(30);
P0=0xff;
P2=0xff;
}
#include "18B20.h" //18B20庫函數
uchar suf; //存放串口收到的數據
uint temp; //輸出溫度值
uint temp; //輸出溫度值
void serial_init() //串口初始化
{
TMOD|=0x20; //定時器設定自動重撞在模式
TH1=TL1=0xfd; //9600波特率
SM2=0; //無多機處理位
SM1=1; // 8位可變波特率模式
SM0=0;
TR1=1; // 定時器1打開
REN=1; //串口接收使能
}
{
TMOD|=0x20; //定時器設定自動重撞在模式
TH1=TL1=0xfd; //9600波特率
SM2=0; //無多機處理位
SM1=1; // 8位可變波特率模式
SM0=0;
TR1=1; // 定時器1打開
REN=1; //串口接收使能
}
void send_byte(uchar u) //發送一個字節函數
{
bit es; //保存先前ES狀態變量,這樣可以不干擾其他用戶用它是現在的狀態
es=ES;
ES=0; //暫時關閉串口中斷
SBUF=u; //數據放入SBUF緩沖器等待發送完成
while(TI==0); //等待發送完成
TI=0;
ES=es; //恢復先前狀態
}
{
bit es; //保存先前ES狀態變量,這樣可以不干擾其他用戶用它是現在的狀態
es=ES;
ES=0; //暫時關閉串口中斷
SBUF=u; //數據放入SBUF緩沖器等待發送完成
while(TI==0); //等待發送完成
TI=0;
ES=es; //恢復先前狀態
}
void send_str(uchar *p) //發送一串字符函數
{
while(*p)
{
send_byte(*p);
p++;
}
}
{
while(*p)
{
send_byte(*p);
p++;
}
}
void str_init() //串口中斷初始化
{
EA=1;
ES=1;
}
{
EA=1;
ES=1;
}
void serial_event() interrupt 4 //串口中斷函數
{
if(RI==1) //在中斷里盡量只做需要的事情
{
{
if(RI==1) //在中斷里盡量只做需要的事情
{
suf=SBUF;
RI=0;
}
else
{
;
}
}
RI=0;
}
else
{
;
}
}
void send_number(uchar *p,uint k) //通過串口發送溫度值函數
{
while(*p)
{
send_byte(*p);
p++;
}
send_byte(' ');
send_byte(' ');
send_byte(k/100+48);
send_byte(k%100/10+48);
send_byte('.');
send_byte(k%10+48);
send_byte('\r');
send_byte('\n');
}
/*
void key8() //按鍵發送函數
{
static uchar i,j;
if(k8==0)
{
if(i==0)
{
j++;
if(j>3)
{
i=1;j=0;
send_number("the temperature is ",temp);
}
}
}
else
{
i=0;
j=0;
}
}
*/
{
while(*p)
{
send_byte(*p);
p++;
}
send_byte(' ');
send_byte(' ');
send_byte(k/100+48);
send_byte(k%100/10+48);
send_byte('.');
send_byte(k%10+48);
send_byte('\r');
send_byte('\n');
}
/*
void key8() //按鍵發送函數
{
static uchar i,j;
if(k8==0)
{
if(i==0)
{
j++;
if(j>3)
{
i=1;j=0;
send_number("the temperature is ",temp);
}
}
}
else
{
i=0;
j=0;
}
}
*/
void main()
{
{
serial_init(); //串口初始化
send_byte(12); //超級終端清屏
send_str("serial_init is ok \r\n"); //初始化好壞標示字符串
str_init(); //串口中斷初始化
send_str("str_init is ok \r\n");
send_byte(12); //超級終端清屏
send_str("serial_init is ok \r\n"); //初始化好壞標示字符串
str_init(); //串口中斷初始化
send_str("str_init is ok \r\n");
while(1)
{
count++;
temp=read_18b20();
show_temp(temp);
if(count>500) //約沒3秒發送一次溫度值給串口
{
send_number("The temperature is ",temp);
count=0;
}
else
{
}
}
}
{
count++;
temp=read_18b20();
show_temp(temp);
if(count>500) //約沒3秒發送一次溫度值給串口
{
send_number("The temperature is ",temp);
count=0;
}
else
{
}
}
}
//-----------------------18B20----庫函數----------------
sbit dq=P3^4; //18B20數據口
void send_1() //發送1位1函數
{
dq=0;
dq=0;
dq=0;
dq=1;
delay(2);
}
{
dq=0;
dq=0;
dq=0;
dq=1;
delay(2);
}
void send_0() //發送1位0函數
{
dq=0;
delay(2);
dq=1;
}
{
dq=0;
delay(2);
dq=1;
}
void Tsend_byte(uchar dat)
{
uchar i;
for(i=0;i<8;i++)
{
if(dat&0x01)send_1();
else send_0();
dat>>=1;
}
}
{
uchar i;
for(i=0;i<8;i++)
{
if(dat&0x01)send_1();
else send_0();
dat>>=1;
}
}
uchar read_byte() //18B20讀取數據函數
{
uchar i,byte;
for(i=0;i<8;i++)
{
dq=0;
dq=0;
dq=1;
dq=1;
byte>>=1;
if(dq==1)
{
byte=byte+0x80; //如果采樣為1則最高位為1
}
delay(3);
}
return byte;
}
{
uchar i,byte;
for(i=0;i<8;i++)
{
dq=0;
dq=0;
dq=1;
dq=1;
byte>>=1;
if(dq==1)
{
byte=byte+0x80; //如果采樣為1則最高位為1
}
delay(3);
}
return byte;
}
uchar start_18b20() //啟動18b20實質上判斷有誤應答信號
{
static uint cnt;
dq=0;
delay(62);
dq=1;
while(dq==1) //等待拉低
{
cnt++;
if(cnt>50000)
{
cnt=0;
return 1; //等待超時判斷說明器件壞了
}
}
while(dq==0)
{
cnt++;
if(cnt>50000)
{
cnt=0;
return 1;
}
}
return 0; //正常啟動返回0值
}
{
static uint cnt;
dq=0;
delay(62);
dq=1;
while(dq==1) //等待拉低
{
cnt++;
if(cnt>50000)
{
cnt=0;
return 1; //等待超時判斷說明器件壞了
}
}
while(dq==0)
{
cnt++;
if(cnt>50000)
{
cnt=0;
return 1;
}
}
return 0; //正常啟動返回0值
}
uint read_18b20() //讀取溫度值函數
{
uchar TH,TL;
uint temp;
start_18b20();
Tsend_byte(0xcc);
Tsend_byte(0x44);
;;
start_18b20();
Tsend_byte(0xcc);
Tsend_byte(0xbe);
TL=read_byte();
TH=read_byte();
temp=TH;
temp<<=8;
temp=temp+TL;
/*if(temp&0xf800) //如果最高位為1則是溫度為負值 .可以設置溫度負值符號
{
temp=~temp+1;
}
*/
temp=temp*0.0625*10; //顯示小數部分
return temp;
{
uchar TH,TL;
uint temp;
start_18b20();
Tsend_byte(0xcc);
Tsend_byte(0x44);
;;
start_18b20();
Tsend_byte(0xcc);
Tsend_byte(0xbe);
TL=read_byte();
TH=read_byte();
temp=TH;
temp<<=8;
temp=temp+TL;
/*if(temp&0xf800) //如果最高位為1則是溫度為負值 .可以設置溫度負值符號
{
temp=~temp+1;
}
*/
temp=temp*0.0625*10; //顯示小數部分
return temp;
}