
LCD1602的數據寫入及CGRAM的使用
1.當使能端E由1變為0時,執行寫指令,數據被寫入。
例如,欲寫入數據i到DDRAM:
void WDR(uchar i)
{
CheckBusy();//檢忙
LCD_RS=1;
LCD_RW=0;
LCD_EN=0;
Delay();
LCD_DATA=i;//數據輸出到定義端口
Delay();
LCD_EN=1;
Delay();
LCD_EN=0;//這一步才開始寫入到LCD
Delay();
}
2.CGRAM
1602能存儲8個自定義字符,這8個自定義字符存儲空間的首地址分別是:0X40,0X48,0X50,0X58,0X60,0X68,0X70,0X78。
以0x40來說,它的存儲空間如圖所示:
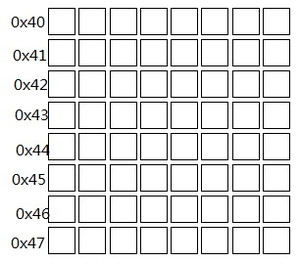
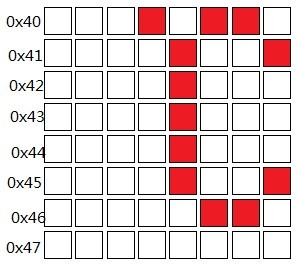
如果使用5*7字符的話,那么最左3位和最后一行的數據實際上是沒用的,通常置0。如果要自定義一個℃符號,那么先填框,如圖(紅1白0):
這樣我們就得到每個地址需要寫入的數據:
地址:數據
0x40:0x16
0x41:0x09
0x42:0x08
其他類推。將這8個數據寫入到對應地址即可。
使用時,先確定顯示的位置,例如0X80,然后向DDRAM寫入自定義字符的使用代碼。0X40-0X78對應為0X00-0X07。
本例中,先寫入指令寄存器0X80確定顯示位置為第一行第一個,然后寫入數據寄存器0X00,這樣就會在第一行第一個位置顯示出℃符號。

以下是源程序如果網頁格式導致部分字符丟失請下載c程序源文件:http://www.zg4o1577.cn/f/avr1602c.rar
#include <iom16.h>
#include <intrinsics.h>
#include <intrinsics.h>
#define u8 uchar unsigned char
#define u16 uchar unsigned int
#define uchar unsigned char
#define uint unsigned int
#define u16 uchar unsigned int
#define uchar unsigned char
#define uint unsigned int
uchar zi[]={0x16,0x09,0x08,0x08,0x08,0x09,0x06,0x00}; //自定義字符攝氏度
#include"1602.h"
#include"18b20.h"
void port_init()
{
PORTA=0xff;
DDRA=0xff;
PORTB=0xff;
DDRB=0xff;
PORTC=0xff;
DDRC=0xff;
PORTD=0xff;
DDRD=0x00;
}
void setzi() //把設定字存入CGRAM
{
uchar i;
writecmd(0x40); //設置第一個字的起始地址
for(i=0;i<8;i++)
{
writedata(zi[i]);
}
}
{
uchar i;
writecmd(0x40); //設置第一個字的起始地址
for(i=0;i<8;i++)
{
writedata(zi[i]);
}
}
void show_temp(uint k)
{
displayonechar(1,1,(k/100)+48);
displayonechar(2,1,(k%100/10)+48);
displayonechar(3,1,'.');
displayonechar(4,1,(k%10)+48);
}
void main()
{
uint TT; //顯示的溫度值
port_init();
delay(1000);
init1602();
displaychar(0,0,"Set zi Test");
setzi();
displayonechar(5,1,0x00); //0x00表示 0x40地址的值
while(1)
{
TT=read_temper();
show_temp(TT);
}
{
uint TT; //顯示的溫度值
port_init();
delay(1000);
init1602();
displaychar(0,0,"Set zi Test");
setzi();
displayonechar(5,1,0x00); //0x00表示 0x40地址的值
while(1)
{
TT=read_temper();
show_temp(TT);
}
}
//---------------1602.h----------------
#define RS PORTB_Bit0
#define RW PORTB_Bit1
#define EN PORTB_Bit2
#define DATA PORTA
#define busy 0x80
#define RW PORTB_Bit1
#define EN PORTB_Bit2
#define DATA PORTA
#define busy 0x80
void delay(uint k)
{
uint i,j;
for(i=0;i<k;i++)
for(j=0;j<1140;j++);
}
{
uint i,j;
for(i=0;i<k;i++)
for(j=0;j<1140;j++);
}
void wait()
{
uchar val;
DATA=0xff;
RS=0;
RW=1;
__no_operation();
__no_operation();
EN=1;
__no_operation();
__no_operation();
DDRA=0x00;
val=PINA;
while(val&busy)
{
val=PINA;
}
EN=0;
DDRA=0xff;
}
void writecmd(uchar cmd)
{
wait();
RS=0;
RW=0;
__no_operation();
DATA=cmd;
__no_operation();
EN=1;
__no_operation();
__no_operation();
EN=0;
}
void writedata(uchar data)
{
wait();
RS=1;
RW=0;
__no_operation();
DATA=data;
__no_operation();
EN=1;
__no_operation();
__no_operation();
EN=0;
}
{
wait();
RS=1;
RW=0;
__no_operation();
DATA=data;
__no_operation();
EN=1;
__no_operation();
__no_operation();
EN=0;
}
void displayonechar(uchar x,uchar y,uchar dda)
{
y&=0x01;
x&=0x0f;
if(y)x|=0x40;
x|=0x80;
writecmd(x);
writedata(dda);
}
void displaychar(uchar x,uchar y,uchar *p)
{
y&=0x01;
x&=0x0f;
while(*p!='\0')
{
if(x<=0x0f)
{
displayonechar(x,y,*p);
p++;
x++;
}
}
}
{
y&=0x01;
x&=0x0f;
while(*p!='\0')
{
if(x<=0x0f)
{
displayonechar(x,y,*p);
p++;
x++;
}
}
}
void init1602()
{
delay(15);
writecmd(0x38);
delay(5);
writecmd(0x38);
delay(5);
writecmd(0x38);
writecmd(0x80);
writecmd(0x01);
writecmd(0x06);
writecmd(0x0c);
}
//--------------18B20.h------------
uchar teml,temh;
uchar sign;
uchar Flag_1820Error;
uint tempp; //溫度值
/*********************************/
void delay_15us(void) //15us左右
{
uchar x=27;
while(x)
{
x--;
}
}
/********************************/
void delay_60us(void) //60us左右
{
uchar x=117;
while(x)
{
x--;
}
}
void init_1820(void)
{
uchar i;
uint j=0;
PORTC|=(1<<7); //"1"
PORTC&=~(1<<7); //"0"
for(i=0;i<8;i++)delay_60us();//480us以上
PORTC|=(1<<7); //"1"
DDRC&=~(1<<7); //"PINC7 is INPUT"
delay_15us(); //15~60us
delay_15us();
Flag_1820Error=0;
while(PINC&(1<<7))
{ delay_60us();
j++;
if(j>=18000){Flag_1820Error=1;break;}
}
DDRC|=(1<<7); //PORTC7 is OUTPUT
PORTC|=(1<<7); //"1"
for(i=0;i<4;i++)delay_60us(); //240us
}
/********************************/
void delay_5us(void) //5us左右
{
uchar x=7;
while(x)
{
x--;
}
}
/********************************/
void write_1820(uchar x)
{
uchar m;
for(m=0;m<8;m++)
{
if(x&(1<<m)) //寫數據,從低位開始
{PORTC&=~(1<<7);delay_5us(); //"0",5us
PORTC|=(1<<7); //write"1"
delay_15us(); //15~45us
delay_15us();
delay_15us();
}
else
{PORTC&=~(1<<7);delay_15us();//"0",15us
delay_15us(); //write"0"
delay_15us(); //15~45us
delay_15us();
PORTC|=(1<<7); //"1"
}
}
PORTC|=(1<<7); //"1"
}
/*******************************/
uchar read_1820(void)
{
uchar temp,k,n;
temp=0;
for(n=0;n<8;n++)
{
PORTC&=~(1<<7); //"0"
delay_5us();
PORTC|=(1<<7); //"1"
delay_5us();
DDRC&=~(1<<7); //"PINC7 is INPUT"
k=(PINC&(1<<7)); //讀數據,從低位開始
if(k)
temp|=(1<<n); //read"1"
else
temp&=~(1<<n); //read"0"
delay_15us(); //45us
delay_15us();
delay_15us();
DDRC|=(1<<7); //PORTC7 is OUTPUT
}
return (temp);
}
/*************************************/
uint read_temper(void)
{
uchar TX; //小數位
uchar TZ; //整數位
init_1820(); //復位18b20
write_1820(0xcc); // 發出轉換命令
write_1820(0x44);
;;;;;;
init_1820();
write_1820(0xcc); //發出讀命令
write_1820(0xbe);
teml=read_1820(); //讀數據byte1
temh=read_1820(); //byte2
TX=teml&0x0f;
temh=temh<<4;
temh|=(teml&0xf0)>>4;
TZ=temh;
tempp=TZ*10+TX;
return tempp;
}
void write_1820(uchar x)
{
uchar m;
for(m=0;m<8;m++)
{
if(x&(1<<m)) //寫數據,從低位開始
{PORTC&=~(1<<7);delay_5us(); //"0",5us
PORTC|=(1<<7); //write"1"
delay_15us(); //15~45us
delay_15us();
delay_15us();
}
else
{PORTC&=~(1<<7);delay_15us();//"0",15us
delay_15us(); //write"0"
delay_15us(); //15~45us
delay_15us();
PORTC|=(1<<7); //"1"
}
}
PORTC|=(1<<7); //"1"
}
/*******************************/
uchar read_1820(void)
{
uchar temp,k,n;
temp=0;
for(n=0;n<8;n++)
{
PORTC&=~(1<<7); //"0"
delay_5us();
PORTC|=(1<<7); //"1"
delay_5us();
DDRC&=~(1<<7); //"PINC7 is INPUT"
k=(PINC&(1<<7)); //讀數據,從低位開始
if(k)
temp|=(1<<n); //read"1"
else
temp&=~(1<<n); //read"0"
delay_15us(); //45us
delay_15us();
delay_15us();
DDRC|=(1<<7); //PORTC7 is OUTPUT
}
return (temp);
}
/*************************************/
uint read_temper(void)
{
uchar TX; //小數位
uchar TZ; //整數位
init_1820(); //復位18b20
write_1820(0xcc); // 發出轉換命令
write_1820(0x44);
;;;;;;
init_1820();
write_1820(0xcc); //發出讀命令
write_1820(0xbe);
teml=read_1820(); //讀數據byte1
temh=read_1820(); //byte2
TX=teml&0x0f;
temh=temh<<4;
temh|=(teml&0xf0)>>4;
TZ=temh;
tempp=TZ*10+TX;
return tempp;
}