
���˱��������ܙC���˵ğ�����ς��W(xu��)���x�������ܙC�����@�T�n���M��������]���r�����I(y��)����ȥ�͒����@�T�x���n��o(����)o ����ps���ώ�ѽ��Ҫ���㿴���Ҍ����@ƪ���º���Ͱl(f��)�l(f��)�ȱ��Ͱ��ҵijɿ����^��������
ӛ�����@�T�n���ώ������v�V�ˆ�Ƭ�C�Ļ�����(y��ng)�ú͆�Ƭ�C���̣�Ȼ���n�̽Y(ji��)���ĕr��o�҂���B����tiny6410�_�l(f��)�塣�����ȥ��������P(gu��n)�Y�ϣ��X�����@�@�K�������h�̿��ƵęC�����ǿ��еģ���˸烺�����?c��)���������֮�۵�tiny6410�_�l(f��)�壨ps���@�ɻ�����600�����ώ�ѽ ��ô��Ҳ�ð��ҳɿ��ļ�����)���P(gu��n)���@�K�_�l(f��)���Ԕ����Ϣ���ԅ��ո�����������֮�۵Ĺٷ��W(w��ng)�l(f��)�������P(gu��n)�ęn��
Ӳ���YԴ
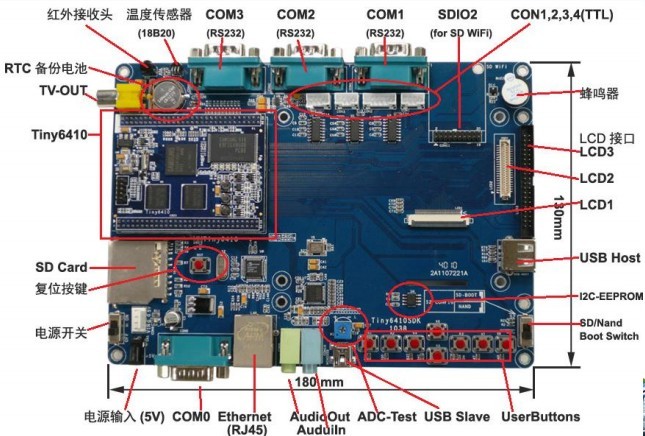
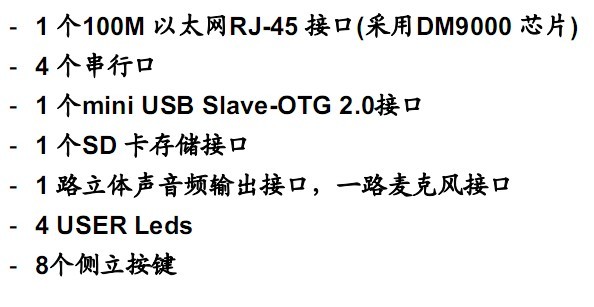
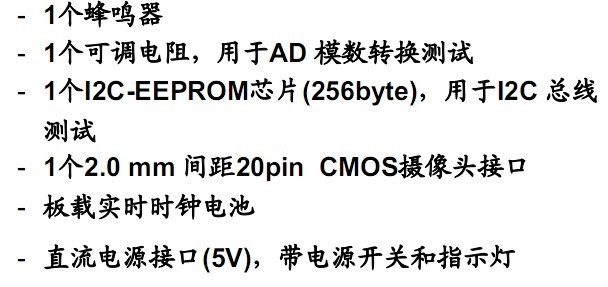
���ȣ��҂��ȿ���tiny6410�ڽӿڷ�����Щ�ӿڣ�
��
��tiny6410�IJ��ֿ��Կ��������ṩ��Ӳ���YԴ���ஔ(d��ng)��ġ�
ܛ���YԴ
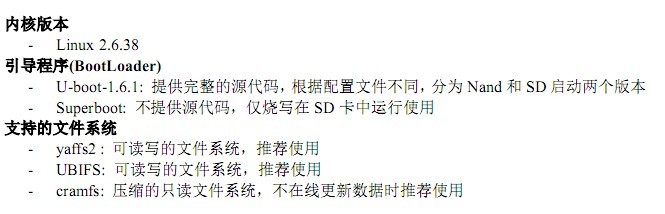
�������҂�������tiny6410��ܛ���YԴ��
Tiny6410���Դ��dlinux������winCEϵ�y(t��ng)��������linuxϵ�y(t��ng)�ĺ��ν�B��
��
�_�l(f��)֮·--�W(w��ng)�j(lu��)ƪ
һ���_�l(f��)˼·
�������linux���ܶ��˕�(li��n)�뵽Ƕ��ʽ�_�l(f��)��linux�µľW(w��ng)�j(lu��)����(w��)�������ǣ�Ƕ��ʽ�_�l(f��)����һ��W(xu��)��ӵ��ˁ��f����һ�����y�ȵģ�����҂���������linux�µľW(w��ng)�j(lu��)����(w��)����һЩ�_�l(f��)��
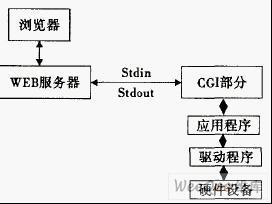
Linux��web����(w��)����Hapd��Thttpd��Boa������Boa����(w��)��Դ���a�_�š����܃�(y��u)�㡢֧��CGIͨ�þW(w��ng)�P(gu��n)�ӿڼ��g(sh��)�����^�m����web�_�l(f��)��Boa����(w��)������ͨ�^CGI�c�ⲿ��(y��ng)�ó�����_��֮�g�M�н���������(j��)�͑��˞g�[����Ո��r�����õķ���������(w��)�����Ѽ��͑����ṩ����Ϣ������ԓ������Ϣ�l(f��)�ͽoָ����CGI�Uչ����CGI�Uչ�����M����Ϣ̎�������Y(ji��)�����ؽo����(w��)����Ȼ�����(w��)������Ϣ�M�з����������Y(ji��)���l(f��)�ͻؿ͑����ڞg�[�����@ʾ�������䌍�@���� B/S���g�[��/����(w��)����ģʽ���������D����ʾ
��
�@��ģʽ���DZ��λ���Boa-web����(w��)�����h�̙C���˿����_�l(f��)����Ҫģʽ�������nj��@��ģʽ���f��������
��D��
1���g�[��������windows�µĞg�[����Ҳ�������֙C�ϵĞg�[�������ƶ�ֻ��һ��html�W(w��ng)퓶��ѡ�
2��Web����(w��)������linux�µ�Boa����(w��)��������Boa����(w��)�������Խ���һ���ӑB(t��i)�ľW(w��ng)վ��ͨ�^�@���W(w��ng)վ�����M��Ƕ��ʽ�O(sh��)����Ñ���֮�g�M����Ϣ������
3��CGI���֡�CGI��һ�N�_���Z�ԣ����Ժ�perl��PHP��C�Z��һ���ã����˷���ӑB(t��i)�W(w��ng)վ�Ĵ�������_�l(f��)��Ҫ��PHP+CGI������
4����(y��ng)�ó��֡��䌍�ڱ����_�l(f��)�У���(y��ng)�ó������һ����CGI�����@��һ����CGI����̎�����Ñ�ͨ�^Boa����(w��)�����f�^������Ϣ��Ȼ��ͨ�^Ӳ�����(q��)�ӳ����{(di��o)���_�l(f��)���Ӳ���O(sh��)�䡣
����Boa��tftp����(w��)���Ĵ
BOA����(w��)����Ҫ�\����ARMǶ��ʽ�O(sh��)���ϵģ������Ҫ��BOAԴ�ļ��M�н��澎�g�����g����ʹ��arm-linux-gcc-4��3��2���澎�g����朣���ؐ�ļ�arm-lin-ux-gcc-4��3��2��tgz��Ŀ䛣�tmp�£���(zh��)������cd��tmp��tar zxvfarm-linux-gcc- 4��3��2��tgz-C�����@�ӽ��澎�ɹ��߾Ͱ��b����usr��local��arm��4.3.2Ŀ����档��_���ڴ��_�K�˺���ֱ�ӑ�(y��ng)�ý��澎�g����朣�Ҫ�ڣ�root����bashrc�ļ��аѾ��g��·�����뵽ϵ�y(t��ng)�h(hu��n)��׃�����\������gedit��root����bashrc���ļ���root����bashrc�����ļ����������export PATH=$PATH����usr��local��arm��4��3��2��bin�������˳���������(zh��)��source��root����bashrc����ʹ�O(sh��)����Ч�����z�y���澎�g�����Ƿ��b�ɹ���������ڽK����ݔ��arm-linux-gcc-v��������ݔ������Ϣ�п���arm-linux-gcc�汾̖4��3��2���f�����b�ɹ���
������Σ����澎�gBOAԴ�a����ؐBOAԴ�a��boa-0��94��13��tar��gz����tmpĿ��£��≺�s�ڴa��tar zxvf boa- 0��94��13��tar��gz���≺����Linux�K���M��BOA����Ŀ䛣����Ȉ�(zh��)�������con-figure����Makefile�ļ���Ȼ����_�ļ��A���ҵ�Makefile�ļ������ı��������_���ҵ�CC=gcc��CPP=gcc-E���У��քe�����O(sh��)�ó���һ�����ɵĽ��澎�g����·�� CC=��usr��local��arm��4��3��2��bin��arm-linux-gcc�� CPP=��usr��local��arm��4��3��2��bin��arm-linux-gcc-E��Ȼ��Makefile������˳����ص��K�ˈ�(zh��)��make ����M�н��澎�g�õ��Ɉ�(zh��)�г���BOA���������܉��\����armǶ��ʽ�O(sh��)���ϵĈ�(zh��)���ļ�����ͨ�^����fileboa�鿴�ļ���Ϣ����ؐ��BOA�ļ���Ŀ�˰壯binĿ��С�
�����ٴΣ�����boa����(w��)��������BOA��Ҫ�Ǟ���ʹ���܉�֧��CGI����Ĉ�(zh��)�С����ļ�ϵ�y(t��ng)�ģ�etcĿ���mkdir boa����һ��BOAĿ䛣���ؐ BOAԴ�aĿ��е�boa��conf�ļ����ļ�ϵ�y(t��ng)Ŀ䛣�etc��boaĿ��£�Ȼ�����(j��)Ƕ��ʽBOA�������ڴ������ļ��Ļ��A(ch��)���M���ġ����Ĵ������ļ��r��Ҫע�Ᵽ�C�����ļ����O(sh��)�ñ���c�����ļ���һ�£���tǶ��ʽWeb����(w��)��BOA�Ͳ��������\�С�
�Boa����(w��)����ɺ�����linux�ļ������еĸ�Ŀ䛕����F(xi��n)www�ļ��A���@���ļ��A����ǰ���ᵽ�ĄӑB(t��i)�W(w��ng)վϵ�y(t��ng)�Ĵ��Ŀ䛡����Ҫ���@���W(w��ng)վϵ�y(t��ng)���ļ��M���x�����@�r���Ҫ�õ�tftp����(w��)���ˣ�ͨ�^tftp����(w��)���҂������p�ɵČ��ļ��Awww�еĄӑB(t��i)�W(w��ng)վϵ�y(t��ng)���ļ��M���x�����P(gu��n)�ڴtftp����(w��)���Ĵ���@��Ͳ�����B�ˡ�
����Boa����(w��)����ֲ�yԇ
��tiny6410��Ӳ���YԴ���Կ������_�l(f��)���ṩ���Ă�LED���҂����εؾ��������yԇһ��ͨ�^Boa����(w��)���h�̿����_�l(f��)���ϵ�LED��
�������£�
��input type=“radio”name=“speed”value=“show”checked������
������input type=“radio”name=“speed”value=“normal”������
������input type=“radio”name=“speed”value=“rast”������
������input type=“submit”value=�_��“name=”submit��
��������leds.cgi�������£�
����#! /bin/sh
����Period=1+case$QUERY-STRING in
����*slow*��
����period=0.25
��������
����* normal *)
����period = 0.125
��������
����* fast *
����period=0.0625+����
����*fast * ) + period =0.0626
��������
����esac
����/bin/echo $ period ? /tmp/led-control//ͨ�^Query_String�ĭh(hu��n)��׃�����f�o��(y��ng)�ó���
����echo “Content-type:texe/html��charset=gb2312”
����echo
����/bin/cat led =result.template
����exit 0
����l(w��i)ed-control�Ǿ��g�õĿɈ�(zh��)�еđ�(y��ng)�ó���ͨ�^led�(q��)�Ӂ팍�F(xi��n)��LED�Ŀ������@ЩӲ���Y�Ͽ���������֮���ṩPDF�ļ��Е��н�B������õ��_�l(f��)���������Ӳ���O(sh��)����Բ�����P(gu��n)��(sh��)��(j��)���M�Ќ�����Ӳ���O(sh��)����{(di��o)�á�
���������O(sh��)�_�l(f��)���IP��192.198.1.230����ôֱ���L��http://192.198.1.230�Ϳ����L��Boa����(w��)���ľW(w��ng)��ˣ�ͨ�^�@���W(w��ng)퓿��Կ����_�l(f��)����LED���W�q�ٶȡ��@�Μyԇ���r�Ͳ��ψD�ˣ��뿴��Ԓ���Ե��Ҍ��ҁ����ٺ١�
�Y(ji��)���Z