
斷斷續(xù)續(xù)使用3天的時間,終于弄明白nRF24L01無線傳輸芯片的原理,可以讓兩塊不同型號的芯片進行遠程數據交換.
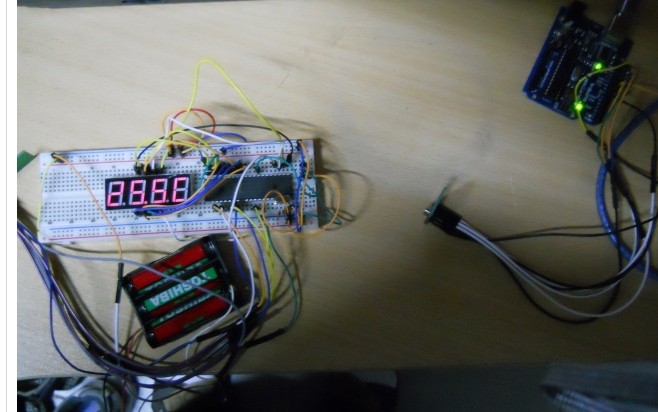
下面的這幅圖片使用這個芯片進行溫度傳輸.其中89C52RC+DS18B20作溫度采集終端,由nRF24L01發(fā)送至arduino最后傳送到PC和processing交互..
最后嘗試使用電池盒作為電源,發(fā)現(xiàn)在距離20米開外的地方也能保證數據傳輸的準確性,說明這塊無線芯片確實性能不錯.
以下是其發(fā)送和接受的源代碼,供有意向的人使用:
STC89C52RC發(fā)送代碼:------------------------------------------------------------------------------------------------------
#include <reg52.h>
#include <intrins.h>
typedef unsigned char uchar;
typedef unsigned char uint;
//****************************************IO端口定義*********************************************
sbit MISO =P1^2;
sbit MOSI =P3^2;
sbit SCK =P1^6;
sbit CE =P1^5;
sbit CSN =P1^7;
sbit IRQ =P1^3; //實際上該端口并未使用
//*****************************************DS1820端口設置****************************************
sbit DQ=P2^7 ;
//************************************數碼管位選**************************************************
sbit led3=P2^0;
sbit led2=P2^1;
sbit led1=P2^2;
sbit led0=P2^3;
//***********************************數碼管0-9編碼***********************************************
uchar seg[10]={0x3F,0x06,0x5B,0x4F,0x66,0x6D,0x7D,0x07,0x7F,0x6F}; //0~9段碼(采用共陰四位數碼管)
uchar seg1[10]={0xBF,0x86,0xcD4,0xCF,0xE6,0xED,0xFD,0x87,0xFF,0xEF}; //加上小數點點后的段碼
uchar data temp_data[2]={0x00,0x00}; //溫度采集數據緩沖區(qū)
uchar display[7]; //顯示緩沖區(qū)
//******************************************************************************************
uint bdata sta; //NRF24L01狀態(tài)標志
sbit RX_DR =sta^6;
sbit TX_DS =sta^5;
sbit MAX_RT =sta^4;
//*************************************NRF24L01**************************************************
#define TX_ADR_WIDTH 5 // 本機地址寬度設置
#define RX_ADR_WIDTH 5 // 接收方地址寬度設置
#define TX_PLOAD_WIDTH 16 // 16 字節(jié)數據長度
#define RX_PLOAD_WIDTH 16 // 16 字節(jié)數據長度
uint const TX_ADDRESS[TX_ADR_WIDTH]= {0x34,0x43,0x10,0x10,0x01}; //本地地址
uint const RX_ADDRESS[RX_ADR_WIDTH]= {0x34,0x43,0x10,0x10,0x01}; //接收地址
//*****************************NRF24L01寄存器指令,詳細請對照,Page18******************************
#define READ_REG 0x00 // 讀寄存器指令
#define WRITE_REG 0x20 // 寫寄存器指令
#define RD_RX_PLOAD 0x61 // 讀取接收數據指令
#define WR_TX_PLOAD 0xA0 // 寫待發(fā)數據指令
#define FLUSH_TX 0xE1 // 沖洗發(fā)送 FIFO指令
#define FLUSH_RX 0xE2 // 沖洗接收 FIFO指令
#define REUSE_TX_PL 0xE3 // 定義重復裝載數據指令
#define NOP 0xFF // 保留
//****************************SPI(nRF24L01)寄存器地址,詳細請對照,Page18-24**********************
#define CONFIG 0x00 // 配置收發(fā)狀態(tài),CRC校驗模式以及收發(fā)狀態(tài)響應方式
#define EN_AA 0x01 // 自動應答功能設置
#define EN_RXADDR 0x02 // 可用信道設置
#define SETUP_AW 0x03 // 收發(fā)地址寬度設置
#define SETUP_RETR 0x04 // 自動重發(fā)功能設置
#define RF_CH 0x05 // 工作頻率設置
#define RF_SETUP 0x06 // 發(fā)射速率、功耗功能設置
#define STATUS 0x07 // 狀態(tài)寄存器
#define OBSERVE_TX 0x08 // 發(fā)送監(jiān)測功能
#define CD 0x09 // 地址檢測
#define RX_ADDR_P0 0x0A // 頻道0接收數據地址
#define RX_ADDR_P1 0x0B // 頻道1接收數據地址
#define RX_ADDR_P2 0x0C // 頻道2接收數據地址
#define RX_ADDR_P3 0x0D // 頻道3接收數據地址
#define RX_ADDR_P4 0x0E // 頻道4接收數據地址
#define RX_ADDR_P5 0x0F // 頻道5接收數據地址
#define TX_ADDR 0x10 // 發(fā)送地址寄存器
#define RX_PW_P0 0x11 // 接收頻道0接收數據長度
#define RX_PW_P1 0x12 // 接收頻道0接收數據長度
#define RX_PW_P2 0x13 // 接收頻道0接收數據長度
#define RX_PW_P3 0x14 // 接收頻道0接收數據長度
#define RX_PW_P4 0x15 // 接收頻道0接收數據長度
#define RX_PW_P5 0x16 // 接收頻道0接收數據長度
#define FIFO_STATUS 0x17 // FIFO棧入棧出狀態(tài)寄存器設置
//************************************NRF24L01函數申明**********************************************
void Delay(unsigned int s);
void inerDelay_us(unsigned char n);
void init_NRF24L01(void);
uint SPI_RW(uint uchar);
uchar SPI_Read(uchar reg);
void SetRX_Mode(void);
uint SPI_RW_Reg(uchar reg, uchar value);
uint SPI_Read_Buf(uchar reg, uchar *pBuf, uchar uchars);
uint SPI_Write_Buf(uchar reg, uchar *pBuf, uchar uchars);
unsigned char nRF24L01_RxPacket(unsigned char* rx_buf);
void nRF24L01_TxPacket(unsigned char * tx_buf);
//************************************DS18B20函數申明**********************************************
void delay1(uint i);
void ds_reset(void);
void write_byte(uchar value);
uchar read_byte(void);
void read_temp();
void work_temp();
//*****************************************長延時*****************************************
void Delay(unsigned int s)
{
unsigned int i;
for(i=0; i<s; i++);
for(i=0; i<s; i++);
}
/******************************************************************************************
/*延時函數
/******************************************************************************************/
void inerDelay_us(unsigned char n)
{
for(;n>0;n--)
_nop_();
}
//****************************************************************************************
/*NRF24L01初始化
//***************************************************************************************/
void init_NRF24L01(void)
{
inerDelay_us(100);
CE=0;
CSN=1;
SCK=0;
SPI_Write_Buf(WRITE_REG + TX_ADDR, TX_ADDRESS, TX_ADR_WIDTH); // 寫本地地址
SPI_Write_Buf(WRITE_REG + RX_ADDR_P0, RX_ADDRESS, RX_ADR_WIDTH); // 寫接收端地址
SPI_RW_Reg(WRITE_REG + RX_PW_P0, RX_PLOAD_WIDTH); //設置接收數據長度,本次設置為4字節(jié)
SPI_RW_Reg(WRITE_REG + RX_PW_P1, RX_PLOAD_WIDTH); //設置接收數據長度,本次設置為4字節(jié)
}
/****************************************************************************************************
/*函數:uint SPI_RW(uint uchar)
/*功能:NRF24L01的SPI寫時序,詳細看時序圖,Page19
/****************************************************************************************************/
uint SPI_RW(uint uchar)
{
uint bit_ctr;
for(bit_ctr=0;bit_ctr<8;bit_ctr++) // output 8-bit
{
MOSI = (uchar & 0x80); // output 'uchar', MSB to MOSI
uchar = (uchar << 1); // shift next bit into MSB..
SCK = 1; // Set SCK high..
uchar |= MISO; // capture current MISO bit
SCK = 0; // ..then set SCK low again
}
return(uchar); // return read uchar
}
/****************************************************************************************************
/*函數:uchar SPI_Read(uchar reg)
/*功能:NRF24L01的SPI時序,詳細看時序圖,Page19
/****************************************************************************************************/
uchar SPI_Read(uchar reg)
{
uchar reg_val;
CSN = 0; // CSN low, initialize SPI communication...
SPI_RW(reg); // Select register to read from..
reg_val = SPI_RW(0); // ..then read registervalue
CSN = 1; // CSN high, terminate SPI communication
return(reg_val); // return register value
}
/****************************************************************************************************/
/*功能:NRF24L01讀寫寄存器函數,
/****************************************************************************************************/
uint SPI_RW_Reg(uchar reg, uchar value)
{
uint status;
CSN = 0; // CSN low, init SPI transaction
status = SPI_RW(reg); // select register
SPI_RW(value); // ..and write value to it..
CSN = 1; // CSN high again
return(status); // return nRF24L01 status uchar
}
/****************************************************************************************************/
/*函數:uint SPI_Read_Buf(uchar reg, uchar *pBuf, uchar uchars)
/*功能: 用于讀數據,reg:為寄存器地址,pBuf:為待讀出數據地址,uchars:讀出數據的個數
/****************************************************************************************************/
uint SPI_Read_Buf(uchar reg, uchar *pBuf, uchar uchars)
{
uint status,uchar_ctr;
CSN = 0; // Set CSN low, init SPI tranaction
status = SPI_RW(reg); // Select register to write to and read status uchar
for(uchar_ctr=0;uchar_ctr<uchars;uchar_ctr++)
pBuf[uchar_ctr] = SPI_RW(0); //
CSN = 1;
return(status); // return nRF24L01 status uchar
}
/*********************************************************************************************************
/*函數:uint SPI_Write_Buf(uchar reg, uchar *pBuf, uchar uchars)
/*功能: 用于寫數據:為寄存器地址,pBuf:為待寫入數據地址,uchars:寫入數據的個數
/*********************************************************************************************************/
uint SPI_Write_Buf(uchar reg, uchar *pBuf, uchar uchars)
{
uint status,uchar_ctr;
CSN = 0; //SPI使能
status = SPI_RW(reg);
for(uchar_ctr=0; uchar_ctr<uchars; uchar_ctr++) //
SPI_RW(*pBuf++);
CSN = 1; //關閉SPI
return(status); //
}
/***********************************************************************************************************
/*函數:void nRF24L01_TxPacket(unsigned char * tx_buf)
/*功能:發(fā)送 tx_buf中數據
/**********************************************************************************************************/
void nRF24L01_TxPacket(unsigned char * tx_buf)
{
CE=0; //StandBy I模式
SPI_Write_Buf(WRITE_REG + RX_ADDR_P0, TX_ADDRESS, TX_ADR_WIDTH); // 裝載接收端地址
SPI_Write_Buf(WR_TX_PLOAD, tx_buf, TX_PLOAD_WIDTH); // 裝載數據
SPI_RW_Reg(WRITE_REG + CONFIG, 0x0A); // IRQ收發(fā)完成中斷響應,8位CRC,主發(fā)送
CE=1; //置高CE,激發(fā)數據發(fā)送
inerDelay_us(10);
}
/***********************************************************************************************************
/*以下是DS18B20溫度傳感相關函數
/**********************************************************************************************************/
void delay1(uint i)
{
for(;i>0;i--);
}
//****************************************************DS1820復位函數***************************************
void ds_reset(void)
{
char temp=1;
while(temp)
{
while(temp)
{
DQ=1;_nop_();_nop_();
DQ=0;
delay1(80);
DQ=1;
delay1(9);
temp=DQ;
}
delay1(64);
temp=~DQ;
}
DQ=1;
}
//***********************************************DS1820寫函數*********************************************
void write_byte(uchar value)
{
uchar i;
for(i=8;i>0;i--)
{
DQ=1;_nop_();_nop_();
DQ=0;_nop_();_nop_();_nop_();_nop_();_nop_();
DQ=value&0x01;
delay1(9);
value>>=1;
}
DQ=1;
delay1(1);
}
//****************************************************DS1820讀函數*****************************************
uchar read_byte(void)
{
uchar i;
uchar value1=0;
for(i=8;i>0;i--)
{
DQ=1;_nop_();_nop_();
value1>>=1;
DQ=0;
_nop_();_nop_();_nop_();_nop_();
DQ=1;
_nop_();_nop_();_nop_();_nop_();
if(DQ)
value1|=0x80;
delay1(9);
}
DQ=1;
return(value1);
}
//****************************************************讀取溫度**********************************************
void read_temp()
{
ds_reset();
write_byte(0xcc);
write_byte(0xbe);
temp_data[0]=read_byte();
temp_data[1]=read_byte();
ds_reset();
write_byte(0xcc);
write_byte(0x44);
}
//****************************************************溫度處理*********************************************
void work_temp()
{
uchar n=0;
if(temp_data[1]>127)
{
temp_data[1]=(256-temp_data[1]); //負值
temp_data[0]=(256-temp_data[0]);
n=1;
}
display[6]=((temp_data[0]&0xf0)>>4)|((temp_data[1]&0x0f)<<4);
display[5]=display[6]/100; //百位
display[4]=display[6]%100; //
display[2]=display[4]/10; //十位
display[1]=display[4]%10; //個位
switch (temp_data[0]&0x0f) //小數位
{
case 0x0f:display[0]=9;break;
case 0x0e:display[0]=9;break;
case 0x0d:display[0]=8;break;
case 0x0c:display[0]=8;break;
case 0x0b:display[0]=7;break;
case 0x0a:display[0]=6;break;
case 0x09:display[0]=6;break;
case 0x08:display[0]=5;break;
case 0x07:display[0]=4;break;
case 0x06:display[0]=4;break;
case 0x05:display[0]=3;break;
case 0x04:display[0]=3;break;
case 0x03:display[0]=2;break;
case 0x02:display[0]=1;break;
case 0x01:display[0]=1;break;
case 0x00:display[0]=1;break;
default:break;
}
if(n) //負值時顯示aa,正直顯示dd
{
display[3]=0x11;
}
else
display[3]=0x22;
}
//****************************************************溫度顯示****************************************************
void disdignit()
{
P0=0x39;
led0=0;
delay1(40);
led0=1;
P0=seg[display[0]];
led1=0;
delay1(40);
led1=1;
P0=seg1[display[1]];
led2=0;
delay1(40);
led2=1;
P0=seg[display[2]];
led3=0;
delay1(40);
led3=1;
}
//************************************主函數************************************************************
void main(void)
{
uchar i=0;
init_NRF24L01() ; //NRF24L01初始化配置
ds_reset();
write_byte(0xcc);
write_byte(0x44);
Delay(6000);
while(1)
{
if(i==3)
{
i=0;
read_temp();
work_temp();
delay1(500);
}
i++;
disdignit();
nRF24L01_TxPacket(display);
SPI_RW_Reg(WRITE_REG+STATUS,0XFF);
}
}
arduino接收代碼:------------------------------------------------------------------------------------------------------------
/**
* An Mirf example which copies back the data it recives.
*
* Pins:
* Hardware SPI:
* MISO -> 12
* MOSI -> 11
* SCK -> 13
*
* Configurable:
* CE -> 8
* CSN -> 7
*
*/
#include <Spi.h>
#include <mirf.h>
#include <nRF24L01.h>
void setup(){
Serial.begin(9600);
Mirf.init();
unsigned char rx_addr[5] = {
0x34,0x43,0x10,0x10,0x01 };
Mirf.setRADDR(rx_addr);
Mirf.payload = 16;
Mirf.channel = 2;
Mirf.config();
Serial.print("channel=");
Serial.println(Mirf.channel,DEC);
Serial.print("payload=");
Serial.println(Mirf.payload,DEC);
for(int i=0;i<5;i++)
{
Serial.print("addr[");
Serial.print(i);
Serial.print("]=");
Serial.println(rx_addr[i],HEX);
}
Serial.println("Listening...");
}
void loop(){
byte data[Mirf.payload];
if(Mirf.dataReady()){
do{
Mirf.getData(data);
Serial.print("temp: ");
Serial.print(data[2],DEC);
Serial.print(data[1],DEC);
Serial.print(".");
Serial.println(data[0],DEC);
}
while(!Mirf.rxFifoEmpty());
}
}
函數中的緩沖區(qū)實際上只使用8個字節(jié),所以可以將arduino中的payload改為8,C51單片機中的TX_PLOAD_WIDTH改為8就能避免傳輸數據的浪費.
至于自動應答功能,等有空再嘗試吧.