
1. 用 途
廣泛應用于檢測與控制系統中,將機械位移變換成電脈沖頻率信號輸出。
除可檢測單、雙向和動、靜態位移外,附加適當機構還可用于測量拉力、壓力、液位、體積、重量、流量等。該系列傳感器已在國內各行業廣泛應用,1998年曾被北京傳感器協會評為“拳頭”產品。
2. 結構及工作原理
主要由螺管線圈、導桿(銜鐵)、電容、集成塊和外殼、后蓋、插頭座、電纜和密封件等組成,內部用導線連成L-C振蕩電路。當導桿受被測物位移而改變其與線圈的相對位置時,磁路的磁阻與線圈電感發生變化,從而改變了電路輸出信號的頻率。適當選擇導桿材料與線圈結構形式,則導桿—線圈中的位移量恰好與輸出信號頻率變化呈良好的線性關系。
3. 特點
◇ 原理新穎,輸出頻率信號,抗干擾;
◇ 與微機配套,無需A/D轉換;
◇ 量程寬,靈敏度高,重復性好,滯后小;
◇ 結構簡單,堅固可*,封裝嚴密,抗振防潮,并有防水、防腐和防爆型產品;
◇ 耗電小,對電源電壓和電纜質量要求不高,特別適合遙測遙控和惡劣環境下使用。
4. 性能指標
◇ 量 程:80mm;
◇ 中心頻率f0:15,(25)KHZ±5%;
◇ 滿量程相對頻偏f/ f0:6~50%;
◇ 精度:1Hz/mm;
◇ 供電要求:電壓直流5V、12V(±10%~15%)電流1~10mA;
◇ 輸出信號V0(P-P)≥3V,波形:方波,正弦波(近似);
◇ 允許電纜長度:DC12V 0~1000米 DC5V 0~100米;
◇ 零點漂移:通電30分鐘后4小時或溫度變化10℃不大于0.7倍的基
本誤差;
◇ 耐沖擊加速度≮100g;
◇ 工作溫度:-20~+50℃(-30~+80℃);
◇ 動態頻響:取決于二次儀表;
5. 使用方法及定貨須知
5.1 二次儀表:可用5位以上數字頻率計,單片機開發的智能測控儀表
等。
5.2 接線
棕色(1號):電源正極
藍色(2號):信號線
黑色(3和4):電源負極
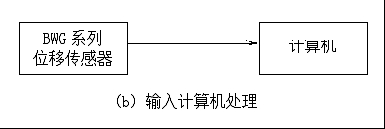
測試方框圖如下:
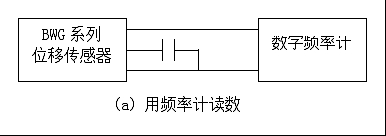
5.3 讀數與數據處理:
傳感器測試靜態位移時,可用頻率計讀數,由以下公式換算:
ΔS=KΔf
其中:K-為傳感器分辨率,單位mm/Hz,在出廠證明書中給出,ΔS和Δf 為位移及其對應輸出的頻偏。
當然,如果用計算機處理數據,則可以直接打印,而不須換算。
本傳感器為線性傳感器,其靈敏度系數K=Δf/ΔP(常數)。因此,如果因使用條件變化而使零點的中心頻率發生變化則在額定量程內,其K值不變。
6. 位移傳感器調試
6.1 傳感器實物圖

6.2 傳感器輸出波形
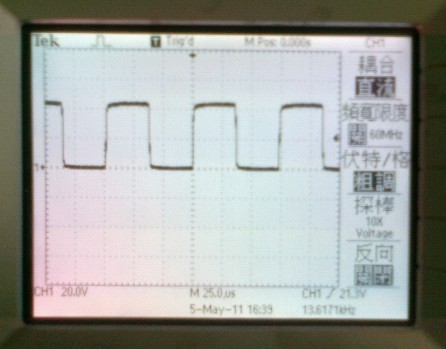
看到此輸出波形就應該知道怎樣讀取傳感器的值,本文采用AVR單片機的定時和計數功能,運用這兩個模塊很容易就讀出傳感器的值,定時計數程序如下:
#include<mega16.h>
#include<delay.h>
#include<Lcd_AVR16_240128.h> //液晶頭文件
unsigned int Counter=0;
void main()
{
unsigned char Text[]={"定時脈沖數"};
//============液晶初始化========
LCD_INIT();
Clear_Screen();
//==============================
//TCCR0=0x07; // T/C0 時鐘由 T0 引腳輸入,上升沿觸發
//TCNT0=0; //計數器0初始值0 T/C0外部計數器輸入
//TCCR1A=0x00;
TCCR1B=0x07; //外部T1引腳計數方式,下降沿驅動
TCNT1=0; //計數器1初始值0 T/C1外部計數器輸入
ASSR=0x00; //T/C2選擇系統內部時鐘源 8M
TCCR2=0x07; // T/C2工作于定時方式,1024分頻 ,
TCNT2=0;
TIMSK|=0x40; //TC2溢出中斷使能
#asm("sei"); //開總中斷
//Show_Text(0,0,Text2);
while(1)
{
Show_Text(0,0,Text);
Show_Int(0,1,Counter-223);//位移為0mm時的脈沖數
delay_ms(8);
}
}
interrupt[5]void TC2(void)
{
Counter = TCNT1;
TCNT1=0;
}
6.3 頻率—脈沖—位移關系
|
位移(mm) |
0 |
10 |
20 |
30 |
40 |
50 |
60 |
70 |
79 |
|
頻率(kHZ) |
13.61 |
14.33 |
15.10 |
15.86 |
16.62 |
17.40 |
18.16 |
18.69 |
18.72 |
|
定時脈沖數 |
0 |
12 |
24 |
37 |
49 |
62 |
74 |
83 |
93 |
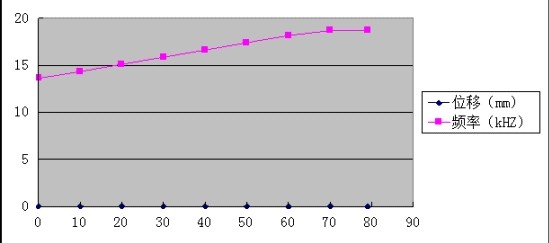
位移與頻率關系
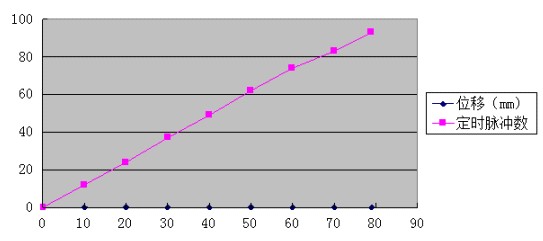
位移與定時脈沖數的關系
從實際測出的數據來看,位移傳感器的線性度非常好。