恩,貌似這個項目已經做了一年多了,其實進展很慢,前大半年都在做知識的積累。真正的開始是這個學期,也就差不多是申請延期之后吧。為什么會這么慢呢,其實小車上面的大部分模塊以及部件的控制,很早以前就已經做的很好了。關鍵的地方就是怎么將他們整合起來,達到最初的設計目標。整合說起來挺容易,想起來也挺容易,可是做起來,卻是麻煩重重,各個模塊之間的數據交換,單片機對模塊返回的數據的處理,然后給模塊的指令,都是一件挺麻煩的事兒,其實這都還好,關鍵是IO和中斷資源的不夠。導致我這學期想用兩塊單片機來進行數據交換和處理。結果是,我花了一個月的時間,收貨卻很少,這是一件很郁悶的事情。兩塊單片機的交換的方式最初打算是用485進行串口交換,可是這樣導致MOUSE的中斷丟失~~最終放棄,而且485其實我很不熟悉。。。然后就是用I2C的存儲芯片,讓兩塊單片機分時讀取存儲設備的數據。這個稍微有點收貨,就是復習了一遍I2C設備的協議。前兩個禮拜,因為我得AVR板上的I2C芯片壞掉,導致我咀嚼了N久的I2C協議,結果換了學長的AVR板,立馬就好了·~~可是最終還是放棄這個方案~~因為分時那一塊兒貌似又不好寫,為了實時分時,只能使用外部中斷作為控制信號,結果是浪費了兩個外部中斷,這是必須杜絕的~~~最終,壓縮硬件,節省IO口,一塊單片機玩完~~~
然后計劃用電腦控制小車,其實這很容易,PC通過串口發送命令道單片機,然后單片機確認命令和執行命令或者返回數據(其實這也不容易,因為PC發送給單片機讀數據雖然是8位的,可是來的8位數據你的分別存儲,然后對存儲的數據進行判斷是否是命令或者根本是錯誤的數據,因為命令也是分很多種的,有要求返回數據的,控制小車運動模式的,剛開始那會我以為能夠發過來返回去就完事兒~~真是大錯特錯~~~不過后面這一塊我做的還不錯,對自己挺滿意的,不過我很想知道別人對串口數據處理的方式,有大大的話教教我把。最終遇到的問題是我不能牽三根線在小車上,難道一個能夠自由運動的小車還給他弄幾根線拴著??
這就說到藍牙串口了,這真不是個好不好的東西(你懂得)。這個東西呢,必須要用淘寶店提供的串口調試,然后調試時成功了。。接收絕對的返回啊。。可是到了單片機,或者電腦上USB轉串口,數據一片片的不對啊,雖然能夠接收發送,可是都是錯的,難道要我譯碼,把錯的譯成對的~~~最近還是少碰藍牙,太累了~~~老板一說是電平不匹配,我得串口帶負載不行。我就自己做了個電路,也不行,一個負載都沒帶,還是不行。
另外,電腦上的自動尋跡和調用串口的API函數都沒怎么搞懂,雖然寫出一個界面出來了,單純只是唬人的~~~悲劇啊~~寒假惡補VC。。。哥要自己來了。
萬般沒辦法之下,只能用最原始的辦法了,紅外i,這個比較唬人~~就是遙控器啦,用遙控器去控制小車模式嘿嘿,雖然簡單,可是實用啊~~先就這么做著吧,誰讓下禮拜有比賽呢,唬唬人吧。。。當然數據也就沒辦法返回啦,所以就在小車上裝個1602液晶啦。其實我想找個彩屏的,窮啊,沒有~~~就這樣吧,好歹能夠顯示ASCII吧~~~
需要返回的數據,避障狀態,巡線狀態,自由模式,超聲波模式(溫度),mouse模式(DSP高精度定位哦(絕對的唬人啊))。暫時就能想到了,可惜現在電腦上沒法很好的實現,所以這些都只能在單片機的幫助下用液晶顯示出來,而不能做出一些很好的合作~~~讓我很郁悶啊,我必須重學VC了~~哥要自己上了~~寫VC。。。
這個禮拜裝車了,好累啊,李文的小電鉆沒弄過來,我是那剪刀自己一個一個轉出來的洞啊,然后裝螺絲,痛苦的回憶,我得手是用來彈吉他的啊~~~不是用來打洞洞的,那拿烙鐵倒無所謂,挺好的。。。嘿。。。辛苦就辛苦吧~~~不辛苦何來幸福。。。
最近加到一個女孩的QQ,幸福ING。。。
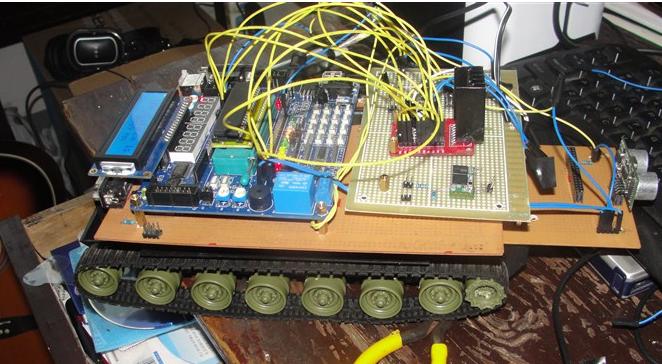
小車微照