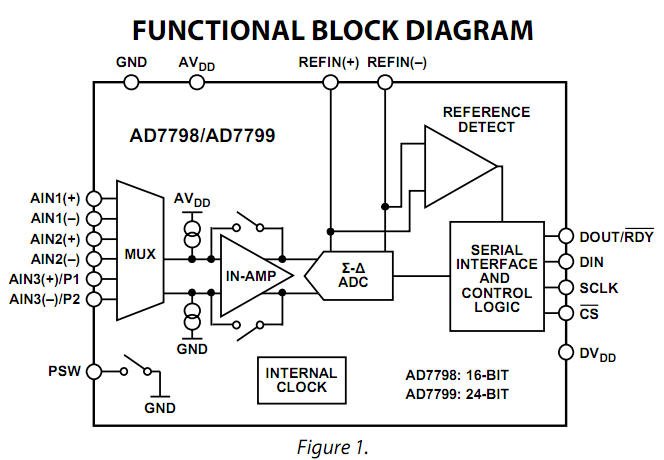
AD7798/AD7799均為適合高精度測量應用的低功耗、低噪聲、完整模擬前端,內置一個低噪聲16位/24位Σ-Δ型ADC,其中含有3個差分模擬輸入,還集成了片內低噪聲儀表放大器,因而可直接輸入小信號。當增益設置為64、更新速率為4.17 Hz時,AD7799的均方根(RMS)噪聲為27 nV,AD7798的均方根(RMS)噪聲為40 nV。AD7798/AD7799片內特性包括一個低端電源開關、基準電壓檢測、可編程數字輸出引腳、熔斷電流控制和一個內部時鐘振蕩器。輸出數據速率可通過軟件編程設置,可在4.17 Hz至470 Hz的范圍內變化。AD7798/AD7799采用2.7 V至5.25 V電源供電,AD7798的典型功耗為300 µA,而AD7799的典型功耗為380 µA,兩款器件均采用16引腳TSSOP封裝。
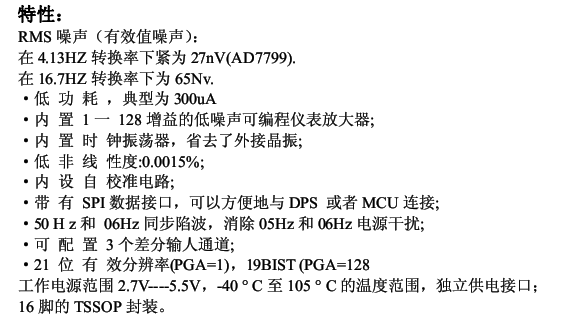
AD7798,AD7799芯片的特性

AD7798,AD7799芯片的概述
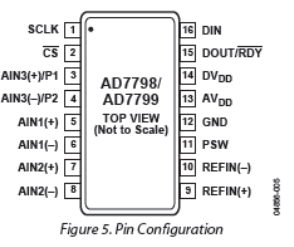
AD7798,AD7799引腳圖,采用16引腳TSSOP封裝。采用2.7V至5.25V電源供電,AD7799的典型功耗為380μA。
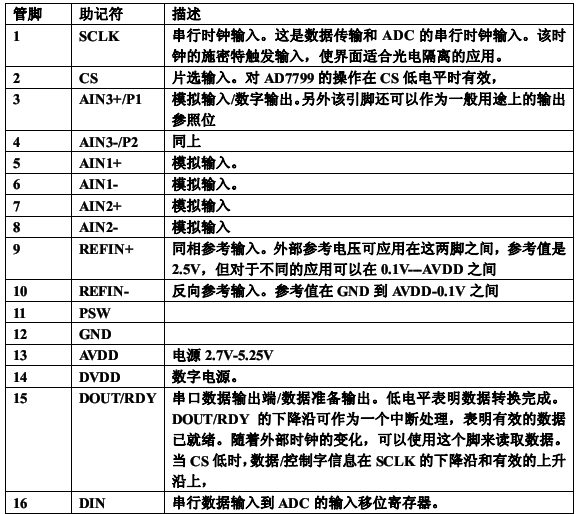
AD7798,AD7799管腳功能介紹
AD7798,AD7799 pdf中文資料下載:http://www.zg4o1577.cn/f/AD7799_ad7798中文資料.pdf
經歷了四天的掙扎,AD7799終于調試成功啦!!!!!!!
說說我遇到的問題
一、不判忙的狀態下,讀出數據是ffffff
解決辦法:
設置CONFIGURATION REGISTER 的con5為1,然后檢測STATUS REGISTER 的NOREF位是否為1,如果為1說明內部基準低于0.5v,也就是說沒有基準。我檢測到NOREF位為1,用萬用表檢測ref+為2.5,不是虛焊。檢測來檢測去沒有問題,開始懷疑芯片,網上剛好也有說這個問題的,他說是芯片基準壞啦。我沒辦法重新焊了一塊板子,問題依舊。沒法硬著頭皮看datasheet,最后發現還是設置的事。在我的硬件上ref-是直接接在管腳psw上的,如圖示:
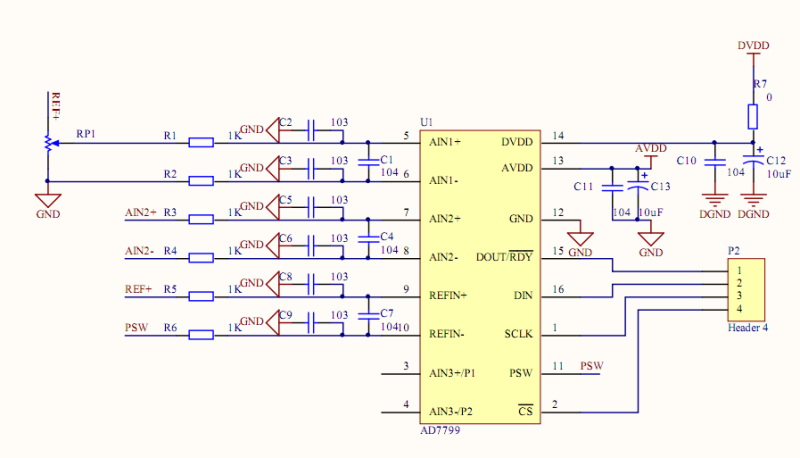
AD7798,AD7799電路
問題就出在這,psw是個可以配置的開關,如圖示
手冊中MODE REGISTER的MR12是控制psw的,描述如下:電源開關控制位。當此位為1時器件的PSW管腳和GND導通,可以允許 30MA 的電流通過;當此為為0時,psw管腳懸空。我在寫MODE REGISTER時沒有將MR12位置1,導致psw懸空,ref-接近2.5V,所以檢測不到基準,讀出數全部為ffffff。
改正方法有兩個
1、置位MODE REGISTER的MR12
2、把ref-直接接到GND
二、不加判忙讀出的數據一直是000000,加上判忙后,一直檢測不到RDY變低,程序一直執行在判忙函數中
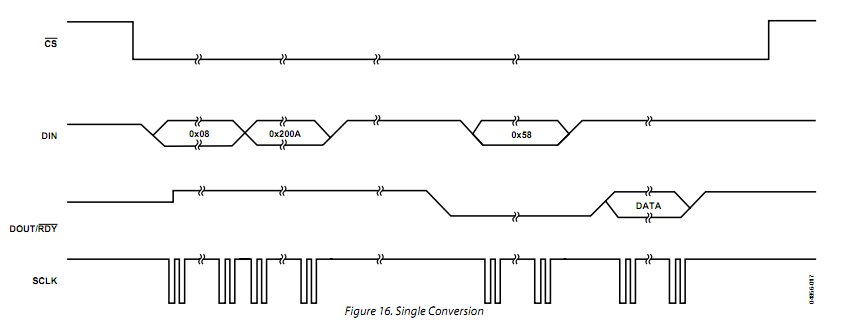
遇到這個問題我就直接崩潰了,這時候我已經不相信芯片是壞的了,沒辦法就懷疑時序,就拿中文手冊加英文手冊去看,看看錯過了哪一點。看了一天多沒啥發現。后來拉個同事一塊看,沒發現什么問題,這時接近崩潰中,用邏輯分析儀也分析了,跟程序寫的時序一樣的,不是程序的事。肯定還是時序的事。插個小事,我給ADI亞太地區技術支持打電話啦,這個問題拖了三天,直到今天才給我打電話,但是給我的感覺就是這個技術支持對這個芯片不是很了解,沒給我太大的幫助,不過還要謝謝今天技術支持的耐心講解和指導。我就接著看程序,今天下午又把內部零刻度校準和片內滿度校準都加了上去,還是不行。然后接著和同事討論,他提議直接把CS接GND,試試就試試,最后發現程序正常啦,趕緊看讀出的數據,發現很準確。調節電位器,重新采集,電壓還是準確。當時就有跳起來的沖動,終于成功啦!!!這樣肯定是CS的時序不對。然后對照手冊發現單次轉換模式下的時序中,CS一直是低電平,如圖示
然后回想起21IC上的一篇日志上也是沒有設置CS,這時候才恍然大悟,原來官方給的例程里都每次讀寫都改變了CS的值,移植官方的讀寫程序,如圖
官方的讀時序

官方的寫時序
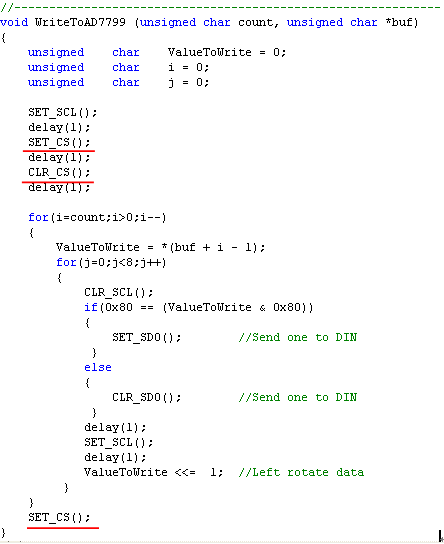
問題就出在程序上畫紅線的語句上
正確的ad7799程序如圖示:
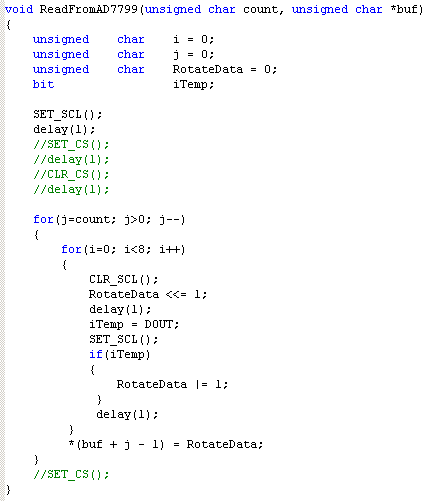

說說官方的程序吧,第一,官方程序沒有判斷RDY變低,所以可以說這個程序根本讀不出數據即使在時序正常時;第二,官方給的讀寫函數里改變了cs的值,但是手冊上沒有改變,驗證表明這個讀寫函數里不應該操作cs
需要注意的是在主程序里,在操作AD7799之前,一定先把CS拉低,所有操作完成后,再把CS拉高。
好了不知道描述的足夠清楚不,希望對以后使用AD7799的同胞有幫助吧!
下面提供一個完整版本的ad7799程序,Keil C寫的ADI的24位A/DAD7799使用SPI接口程序:(VRS51L3074單片機 是一顆基于8051內核集成了多種模塊并可多 范圍的在嵌入式設計中應用的芯片,完整的工程文件及hex下載地址:http://www.zg4o1577.cn/f/Keil_C_AD7799.rar )
#pragma CODE DEBUG SYMBOLS OBJECTEXTEND //SRC 當與匯編混合編譯時需要
#include"VRS51L3074_keil.h"
#include<intrins.h>
#define uchar unsigned char
#define uint unsigned int
#define ulong unsigned long
typedef union{ //無符號字符型,整形,長整形數據聯合體
uchar uc[2];
uint ui;
}UCI;
typedef union{ //無符號字符型,整形,長整形數據聯合體
uchar uc[4];
uint ui[2];
ulong ul;
}UCIL;
#define DELAY5 delay() //_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();_nop_()
sbit P1_5 = P1^5; //1
sbit P1_6 = P1^6; //2
sbit P1_7 = P1^7; //3
sbit P4_5 = P4^5; //6 pin
sbit P5_0 = P5^0; //7
sbit P5_1 = P5^1; //8
sbit P5_2 = P5^2; //9
sbit P5_3 = P5^3; //10
sbit P5_4 = P5^4; //20
sbit P5_5 = P5^5; //21
sbit P5_6 = P5^6; //22
sbit P5_7 = P5^7; //23
#define AD7799_CS P4_5 //輸出 6pin
#define AD7799_SCLK P5_1 //輸出 8pin
#define AD7799_DOUT P5_2 //輸入 9pin
#define AD7799_RDY P5_2 //輸入 9pin 同上是一個引腳
#define AD7799_DIN P5_0 //輸出 7pin
UCIL MainData,demoul;
ulong xdata XMainData,xdemoul;
void Ad7799_Ini();
#define DELAYS10 _nop_();_nop_();_nop_();_nop_()
void delay(char i)
{uchar j;
for(;i>0;i--); for(j=0;j<10;j++)_nop_();
}
void CPUInit(void)
{
/*I/O口配置:輸入配置為1(配置為1后,內部自動上拉到2.5V,輸出配置為0;空腳要配置為0*/
PERIPHEN1=0x18; //BIT7:SPICSEN 6:SPIEN 5:I2CEN 4:U1EN 3:U0EN 2:T2EN 1;T1EN 0:T0EN //TIMER2和TIMER0使能
P0PINCFG=0x00;
P1PINCFG=0x04;
P2PINCFG=0x00; //00100100
P3PINCFG=0x01;
P4PINCFG=0x00;
P5PINCFG=0x04; //00000100
P6PINCFG=0x00;
PORTINEN=0xff; //0xff全部I/O口均不使用
P0=P1=P2=P3=P6=0x00; P4=0x00;P5=0x04;
PERIPHEN2=0x28;//BIN7:PWC1EN 6:PWC0EN 5:AUEN 4:XRAM2CODE 3:IOPORTEN 2:WDTEN 1:PWMSFREN 0:FPIEN 算術單元、IO口使能*/
P0=P1=P2=P3=P6=0x00; P4=0x00; P5=0x04;
AD7799_CS=1;
UART0CFG=0x90; // 0x09:38400 BRADJ=0x02(19200)/波特率發生器使用內部晶振/9th不使用/1位停止位
UART0INT=0x00; //使能接收中斷,使能發送完成中斷,允許接收 Enable RX AV + RXOVint + Enable Reception
UART0EXT=0x00; //Not using UART0 Extensions
UART0BRL=0x1f; //0040=19200 001f=38400
UART0BRH=0x00; //波特率19200
U0IEN=1;
GENINTEN = 0x01; //Enable Global interrupt
UART0BUF=0xff;
while(!(UART0INT & 0x01));
UART0BUF=0xff;
while(!(UART0INT & 0x01));
UART0BUF=0xff;
while(!(UART0INT & 0x01));
UART0BUF=0xff;
while(!(UART0INT & 0x01));
UART0BUF=0x0d;
while(!(UART0INT & 0x01));
}
/* AD7799寫寄存器函數
WriteData:要寫的數據*/
void WriteByteToAd7799(unsigned char WriteData)
{
unsigned char i ;
AD7799_CS=0;
for(i=0;i<8;i++)
{
DELAYS10;
AD7799_SCLK=0 ;
DELAYS10;
if(WriteData&0x80)AD7799_DIN=1 ;
else AD7799_DIN=0 ;
WriteData=WriteData<<1 ;
DELAYS10;
AD7799_SCLK=1 ;
DELAYS10;
}
AD7799_CS=1;
}
/*AD7799讀寄存器函數*/
unsigned char ReadByteFromAd7799(void)
{
unsigned char i ;
unsigned char ReadData ;
AD7799_CS=0;
ReadData=0 ;
for(i=0;i<8;i++)
{
DELAYS10;
AD7799_SCLK=0 ;
DELAYS10;
ReadData=ReadData<<1 ;
if(AD7799_DOUT)ReadData+=1 ;
DELAYS10;
AD7799_SCLK=1 ;
DELAYS10;
}
AD7799_DOUT=1 ;
AD7799_CS=1;
return(ReadData);
}
void WaiteRDY(void)
{
unsigned int iint ;
iint=0 ;
while(AD7799_RDY)
{
iint++;
if(iint>65530)
{
//reset ad7799
WriteByteToAd7799(0xff);
WriteByteToAd7799(0xff);
WriteByteToAd7799(0xff);
WriteByteToAd7799(0xff);
Ad7799_Ini();
break ;
}
}
}
void Ad7799_Ini()
{
WriteByteToAd7799(0x10);
//b0001 0000
/* Writes to Communications Register Setting Next Operation as Write to CONFIGURATION Register*/
//寫通訊寄存器為:下一操作寫配置寄存器 WriteByteToAd7799(0x10)b0001 0000 0寫通訊0下操作寫010配置寄存器0關連續讀00留用
WriteByteToAd7799(0x37);//增益為128 B0011 0111 00留用1開電流源1單端 0留用111是128倍增益
WriteByteToAd7799(0x00); //通道號 0 B0011 0000 00留用1基準默認1開緩沖 0留用000通道0
//1通道
/*CONFIGURATION REGISTER[00,BO(0),U/B(0),0(0),G2(1),G1(1),G0(1),0,0,REF_DET(0),BUF(1),0(0),CH2(0),CH1(0),CH0(0)]*/
//WriteByteToAd7799(0x08);
//b0000 1000
/* Writes to Communications Register Setting Next Operation as Write to Mode Register*/
//WriteByteToAd7799(0x80);
//WriteByteToAd7799(0x0a);
/* Writes to Mode Register Initiating Internal Zero-Scale Calibration*/
//WaiteRDY();
/* Wait for RDY pin to go low to indicate end of calibration cycle*/
//WriteByteToAd7799(0x08);
/* Writes to Communications Register Setting Next Operation as Write to
Mode Register*/
//WriteByteToAd7799(0xa0);
//WriteByteToAd7799(0x0a);
/* Writes to Mode Register Initiating Internal Full-Scale Calibration*/
//WaiteRDY();
/* Wait for RDY pin to go low to indicate end of calibration cycle*/
WriteByteToAd7799(0x08);//b0000 1000
/* Writes to Communications Register Setting Next Operation as Write to Mode Register*/
WriteByteToAd7799(0x00); //000連續模式0斷PSW0000留用
WriteByteToAd7799(0x09); //0000留用0011(123Hz)1010(16.7HZ65dB)
/* Mode Register[MD2(0),MD1(0),MD0(0),PSW(0),0(0),0(0),0(0),0(0),(0),(0),0(0),0(0),FS3(1),FS2(0),FS1(1),FS0(0)]*/
/*模式0 Continuous-Conversion Mode.,Fadc=16.7HZ;*/
}
ulong ReadAd7799ConversionData(void)
{
ulong ConverData ;
unsigned char ADSAT ;
unsigned char ErrNUM=0;
WaiteRDY(); //等待數據READY
WriteByteToAd7799(0x40); //0100 0000 配置下一操作為:讀狀態寄存器
ADSAT=ReadByteFromAd7799(); //讀出狀態 8位
while((ADSAT&0x40)||(!(ADSAT&0x08))) //出錯或者讀寫異常
{
WriteByteToAd7799(0xff); //復位
WriteByteToAd7799(0xff);
WriteByteToAd7799(0xff);
WriteByteToAd7799(0xff);
Ad7799_Ini(); //初始化
WaiteRDY(); //讀狀態
WriteByteToAd7799(0x40); //下一操作:讀狀態
ADSAT=ReadByteFromAd7799(); //讀狀態
ErrNUM++;
if(ErrNUM>5)return(0xffffff);//if(ErrNUM>5)break; //連續5次都讀出錯
}
WriteByteToAd7799(0x58); //0101 1000 配置下一操作:讀數據寄存器,000
/* Writes to Communications Register Setting Next Operation as Continuous Read From Data Register*/
WaiteRDY();
/* Wait for RDY pin to go low to indicate end of calibration cycle*/
if(!AD7799_RDY)
{
ConverData=0 ;
ConverData=ReadByteFromAd7799();
ConverData=ConverData<<8 ;
ConverData=ReadByteFromAd7799()+ConverData;
ConverData=ConverData<<8 ;
ConverData=ReadByteFromAd7799()+ConverData;
}
/* Read Conversion Result from AD7799's Data Register*/
return(ConverData);
}
UCIL temp;
void main(void)
{
uint code *adtpoint; //
uchar i=0,j=0;
delay(100);
CPUInit();
//AD7799_CS=0;
delay(10);
WriteByteToAd7799(0xff); //寫入32個高電平,復位ADC
WriteByteToAd7799(0xff);
WriteByteToAd7799(0xff);
WriteByteToAd7799(0xff);
Ad7799_Ini();
while(1)
{
temp.ul=ReadAd7799ConversionData();
UART0BUF=temp.uc[0];
while(!(UART0INT & 0x01));
UART0BUF=temp.uc[1];
while(!(UART0INT & 0x01));
UART0BUF=temp.uc[2];
while(!(UART0INT & 0x01));
UART0BUF=temp.uc[3];
while(!(UART0INT & 0x01));
}
}
