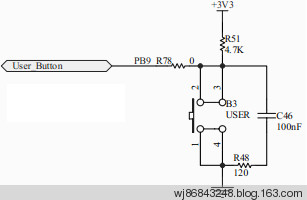
<abbr id="aiemu"><source id="aiemu"></source></abbr> <center id="aiemu"><acronym id="aiemu"></acronym></center> <nav id="aiemu"><dl id="aiemu"></dl></nav> <button id="aiemu"></button> 標題: STM32_GPIO配置及庫函數講解—獨立按鍵 [打印本頁] 作者: liuzhu 時間: 2015-9-10 01:17標題: STM32_GPIO配置及庫函數講解—獨立按鍵User Button硬件連接如下圖所示:當按鍵被按下,PB9檢測到低電平,相反PB9被3.3V電源拉高。
LED硬件連接如下圖所示:高電平點亮LED。
要想將PB9管腳配置成輸入模式,程序所需如下步驟:(必須的)
第一步:配置系統時鐘。見STM32F103x RCC寄存器配置
除此之外,還需將GPIO外設時鐘打開。
/* Enable GPIOC and GPIOB clock */第三步:配置GPIO的模式。輸入模式還是輸出模式。STM32_GPIO配置及庫函數講解——LED跑馬燈 已講過。
void GPIO_Configuration(void)
第四步:讀該管腳上的電平狀態。需要介紹一個庫函數。
v GPIO_ReadInputDataBit 從指定Port指定Pin,讀該管腳上的電平狀態 : u8 GPIO_ReadInputDataBit (GPIO_TypeDef* GPIOx, u16 GPIO_Pin)
涉及到GPIO_IDR寄存器,如下所示
經過上面4步,就可以檢測PB9管腳的電平狀態。
按鍵按下,PB9管腳應該是低電平,怎么才能驗證,最簡單的方法是:當按鍵被按下,點亮所有LED。
下面給出完整程序:
/* Includes ------------------------------------------------------------------*/還有個問題: PB9的初始狀態是什么?或者說GPIO_Configuration函數后PB9管腳上是高電平還是低電平?
這要看GPIO_InitStructure結構體的GPIO_Mode成員變量初始化為什么,如果為上拉,則PB9管腳為高電平;如果為下拉,則PB9管腳為低電平。
GPIO管腳內部電路設計如圖:
當GPIO初始化為輸入上拉模式,由上圖可知:該端口向外輸出高電平,即:ODR對應位為1
當GPIO初始化為輸入下拉模式,由上圖可知:該端口向外輸出低電平,即:ODR對應位為0
如何調試: 在下面兩處處設個斷點。
1. GPIO初始化函數GPIO_Configuration中
可以看到:當GPIO設置成輸入上拉模式時,等待GPIO初始化完畢,該管腳ODR9為1
2. 在main函數中,設置一個斷點。
全速執行(F5),按住User Button不放,可以看到GPIOB_IDR的IDR9=0。當放開按鍵時,再單步調試(F10),
GPIOB_IDR的IDR9=1。
總結: 1. GPIO配置成輸入模式時,最好配置成浮空輸入(ODR對應位為0)。上拉、下拉只是該管腳初始化完對外表現的電平狀態。 2. GPIO配置成輸入模式,只關心GPIO_IDR寄存器。檢測該管腳外部輸入的是高電平還是低電平。 3. GPIO配置成輸出模式,只關心GPIO_ODR寄存器。通過該管腳向外部輸出高電平還是低電平。 作者: LINGdong0110 時間: 2020-6-17 20:27作者: LINGdong0110 時間: 2020-6-17 20:30
歡迎光臨 (http://www.zg4o1577.cn/bbs/)
Powered by Discuz! X3.1
主站蜘蛛池模板:
国产中文字幕在线观看
|
日本欧美在线观看视频
|
日韩精品
|
亚洲成人日韩
|
91久久精品一区二区二区
|
蜜桃视频麻豆
|
亚洲欧美日韩精品久久亚洲区
|
日日夜夜草
|
日韩高清成人
|
欧美中文字幕
|
视频一区二区在线观看
|
亚洲国产精品久久
|
亚洲国产成人精品女人久久久
|
国产特一级黄色片
|
成人av一区二区在线观看
|
亚洲一区二区三区在线观看免费
|
欧美一级黄色免费
|
天天拍天天操
|
黄色国产在线播放
|
亚洲成人精品一区
|
亚洲午夜视频在线观看
|
国产激情在线
|
国产乱码久久久
|
男人的天堂久久
|
日本电影网站
|
亚洲精品女人久久久
|
亚洲国产精品视频
|
午夜日韩精品
|
国产一区二区在线看
|
又爽又黄axxx片免费观看
|
久久亚洲欧美日韩精品专区
|
亚洲情综合五月天
|
在线观看视频h
|
欧美日韩三级视频
|
美国黄色毛片
|
日本三级网址
|
www.亚洲成人网
|
亚洲精品视频在线播放
|
久久99久久98精品免观看软件
|
精品视频在线播放
|
欧美不卡 |