|
2017全國大學生電子設計競賽設計報告
可見光室內定位裝置 (I 題)
菏澤學院 蔣震機電工程學院
摘要
本系統由STC89C52RC最小系統板為核心,光敏傳感器根據光照強度分別檢測 XY軸坐標, PCF8591A/D轉換器將傳感器檢測的光照轉 化為數字量,通過電路傳遞到LCD1602 液晶顯示屏,在LCD1602液 晶顯示屏顯示XY軸及五個區域。按鍵按下將當前的數字量記錄下來 并設為基準值, 根據新檢測的數字量相對基準值判斷 Y軸坐標, 從而 實現校正原點。頂部平面采用三個開關,一個47Ω的電阻和一個二 極管組成控制電路,控制三個大功率發光二極管。由此完成定位。
目錄
1 設計任務與要求 ...............................................................................4
1.1 設計任務 ................................................................................................4...
2 設計要求...........................................................................................4
2.1 基本要求 ................................................................................................4...
2.2 發揮部分 ................................................................................................5...
3 系統方案...........................................................................................5
3.1 電源的論證與選擇 .................................................................................6..
3.2 光敏傳感器模塊的論證與選擇 .............................................................6..
3.3 控制系統的論證與選擇.........................................................................6..
3.4顯示模塊的論證與選擇.........................................................................7..
4 方案描述...........................................................................................8
4.1 光源及探測器特性 .................................................................................8..
4.2 驅動電路 ................................................................................................9...
4.3 數據編碼 ..............................................................................................1..0.
4.4 數據解碼 ..............................................................................................1..1.
4.5 識別映射 ..............................................................................................1..2.
5 設計分析與計算 .............................................................................12
5.1 檢測 XY軸坐標 .....................................................................................1..2
5.2 A/D 轉換模塊 ........................................................................................1..3
5.3 鍵盤輸入 ..............................................................................................1..3.
5.4 電源模塊 ..............................................................................................1..3.
5.5 電路原理框圖 .......................................................................................1..3
5.6 結構尺寸圖 ..........................................................................................1..4.
6 測試方案與測試結果 .....................................................................14
6.1 測試方案 ..............................................................................................1..4.
6.1.1 硬件測試..............................................................................................1..4.
6.1.2 軟件仿真測試.......................................................................................1..4
6.1.3 硬件軟件聯調.......................................................................................1..4
6.2 零件原理圖匯總 ...................................................................................1..5
6.3 測試條件與儀器 ...................................................................................1..5
7 軟件設計.........................................................................................15
7.1 主程序流程圖 .......................................................................................1..5
8 程序清單(見附件一) ..................................................................16
9 測試方案與測試結果 .....................................................................16
9.1 測試方案 ..............................................................................................1..6.
9.1.1 硬件測試..............................................................................................1..6.
9.1.2 軟件仿真測試.......................................................................................1..6
9.1.3 硬件軟件聯調.......................................................................................1..6
9.2 測試條件與儀器 ...................................................................................1..6
9.3 測試結果及分析 ...................................................................................1..6
10 結論和總結 ..........................................................................17
10.1 對設計的小結 .......................................................................................1..7
10.2 設計收獲體會 .......................................................................................1..7
10.3 對設計進一步完善的建議 ...................................................................1..7
1 設計任務與要求
1.1 設計任務
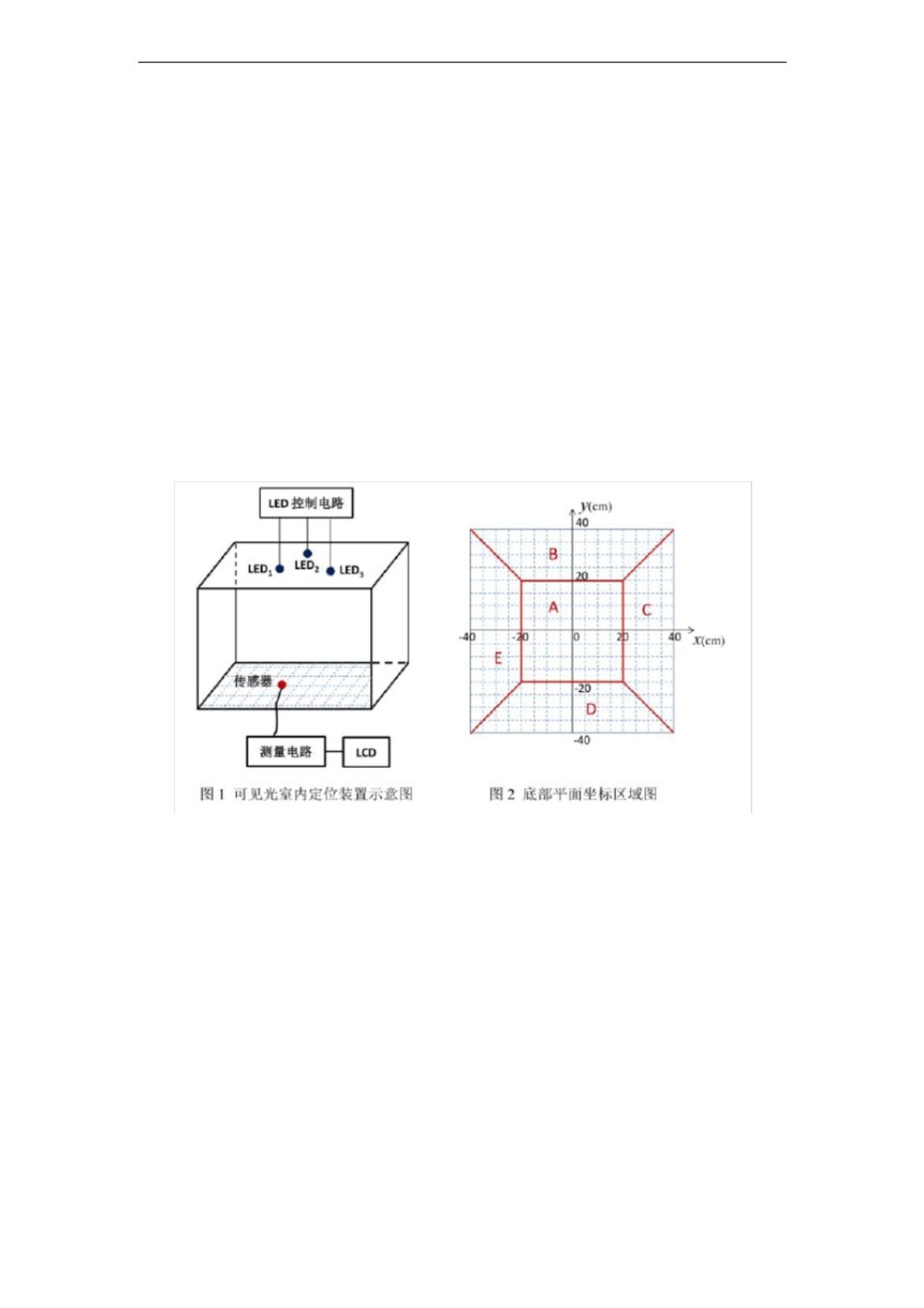
設計并制作可見光室內定位裝置,其構成示意圖如圖 1 所示。參賽 者自行搭建不小于 80cm× 80cm×80cm的立方空間 (包含頂部、 底部 和 3 個側面)。頂部平面放置 3 個白光 LED,其位置和角度自行設 置,由 LED 控制電路進行控制和驅動; 底部平面繪制縱橫坐標線 (間 隔 5cm),并分為 A 、B、 C、D、E 五個區域,如圖 2 所示。要求在
3 個 LED 正常照明(無明顯閃爍)的情況下,測量電路根據傳感器
檢測的信號判定傳感器的位置。
2 設計要求
2.1 基本要求
( 1)傳感器位于 B 、 D 區域,測量電路能正確區分其位于橫坐 標軸的上、下區域。
( 2)傳感器位于 C、 E 區域,測量電路能正確區分其位于縱坐 標軸的左、右區域。
( 3)傳感器位于 A 區域,測量顯示其位置坐標值,絕對誤差不
大于 10cm。
( 4)傳感器位于 B 、 C、D、E 區域,測量顯示其位置坐標值, 絕對誤差不大于 10cm。
( 5)測量電路 LCD 顯示坐標值,顯示分辨率為 0.1cm。
2.2 發揮部分
( 1)傳感器位于底部平面任意區域,測量顯示其位置坐標值, 絕對誤差不大于 3cm。
( 2)LED 控制電路可由鍵盤輸入阿拉伯數字,在正常照明和定 位(誤差滿足基本要求 (3) 或(4) )的情況下,測量電路能接收并顯示
3 個 LED 發送的數字信息。
( 3)LED 控制電路外接 3 路音頻信號源, 在正常照明和定位的 情況下, 測量電路能從 3 個 LED 發送的語音信號中, 選擇任意一路 進行播放,且接收的語音信號均無明顯失真。
( 4)LED 控制電路采用 +12V 單電源供電,供電功率不大于 5W。
( 5)其他。
3 系統方案
本系統主要由電源模塊傳感器檢測模塊 測量電路 顯示模塊,下 面分別論證這幾個模塊的抉擇。
3.1 電源的論證與選擇
方案一:直接使用電池組供電,該電源隨著使用電壓不穩。 方案二:采用開關電源效率高,但是需要購買,且比較貴。 方案三: 自行設計穩壓電源模塊給系統各部分供電, 由于各穩壓
芯片不貴,而且電壓可調,做好濾波設計,使用效果也不錯。 綜合以上三種方案,選擇方案三。
3.2 光敏傳感器模塊的論證與選擇
光敏傳感器是利用光敏元件將光信號轉換為電信號的傳感器, 它 的敏感波長在可見光波長附近, 包括紅外線波長和紫外線波長。 光傳 感器不只局限于對光的探測, 它還可以作為探測元件組成其他傳感器, 對許多 非電量進行檢測, 只要將這些非電量轉換為光信號的變化 即可。
3.3 控制系統的論證與選擇
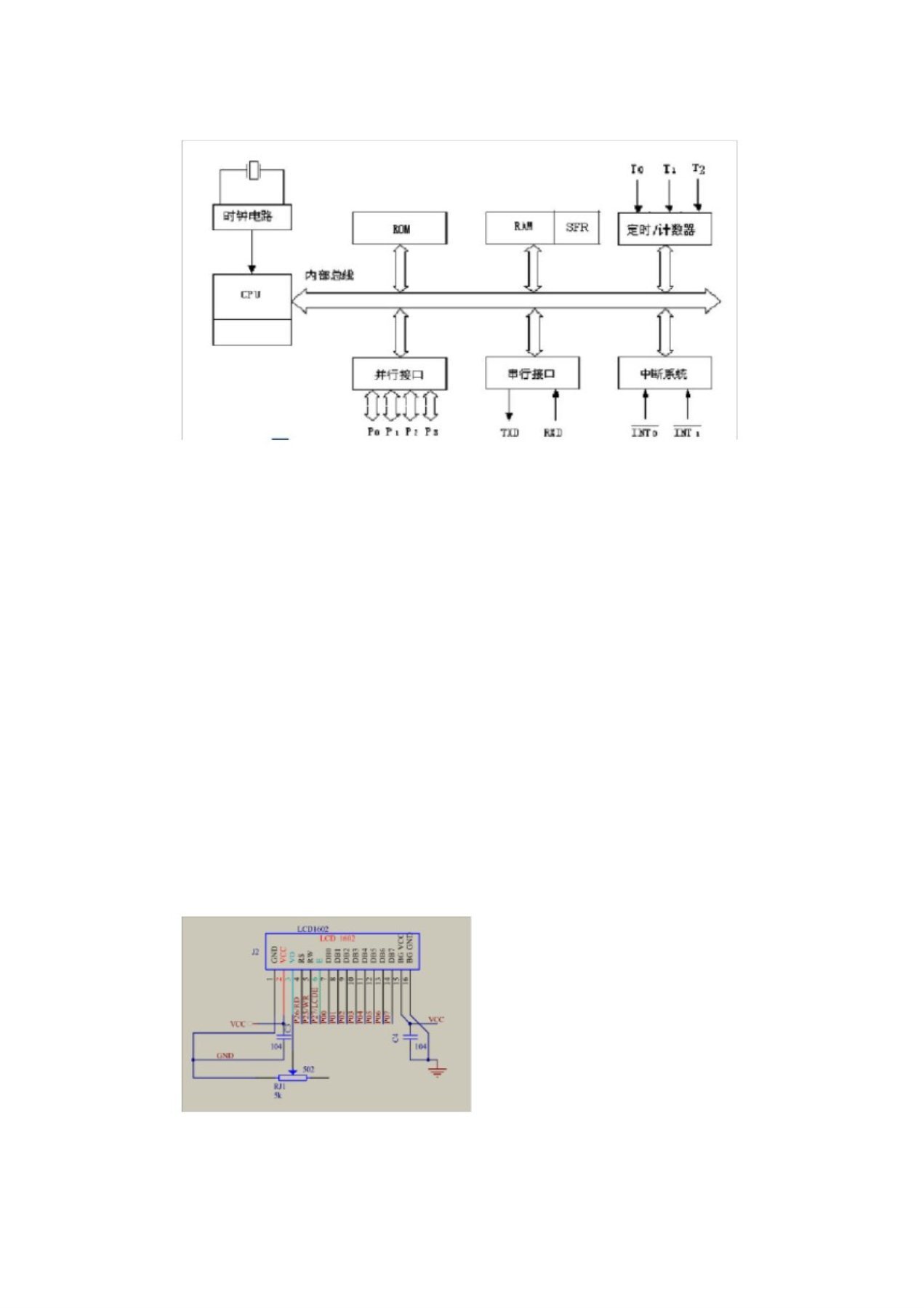
AT89C52這種單片機對開發設備的要求很低,開發時間短。寫入 單片機內的程序還可以進行加密。再者 AT89C52目前的售價比 8031 還低,市場供應也很充足。所以選用 AT89C52為主控芯片。
圖 2—3 AT89C52 單片機的基本結構
3.4 顯示模塊的論證與選擇
LED數碼管顯示實現原理簡單,顯示直觀,編程簡單,但顯示內 容單一, 若要同時顯示坐標軸, 區域位置等諸多信息則需要大量的數 碼管,而且不能顯示中文,由此增加了電路的復雜程度,也加大了編 程的難度。
LCD可以設置顯示坐標軸等信息,它具有低功耗,可視面大,畫 面友好及抗干擾能力強等功能,其顯示技術已經得到廣泛的應用。
綜上所述,選用 LCD1602液晶顯示屏更優。
4 方案描述
按照設計的基本要求,系統可分為三大模塊,數據采集模塊、控 制器模塊、 人機交互界面模塊。 其中數據采集模塊由電阻應變片傳感器、信號的前級處理和 A/D 轉換部分組成。 轉換后的數字信號送給控
制器處理, 由控制器完成對該數字量的處理, 驅動顯示模塊完成人機
間的信息交換。 鍵 盤  單 光敏 單 光敏
傳感 信號放 大器 器 信號轉 換 片 制 機
LCD 顯 示
可見光室內定位裝置模塊設計圖
4.1 光源及探測器特性
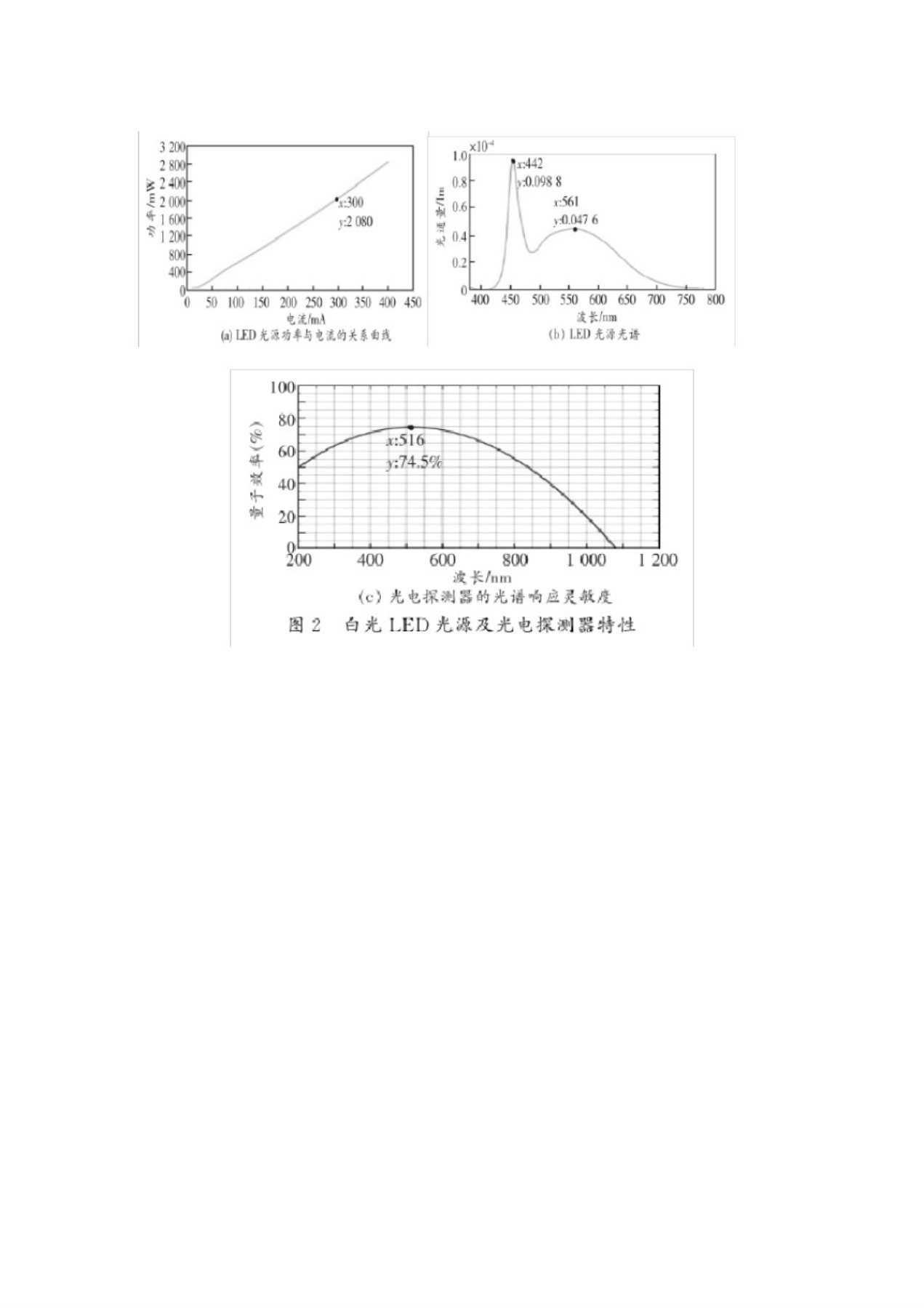
實驗選用 3W 的大功率白光 LED 作為信號源 , 為在盡可能不影 響光源正常工作的前提下實現穩定可靠的無線通信 , 實驗選用略低于 額定工作電流的 500mA 作為直流偏置點。圖 2 所示為白光 LED 光 源及光電探測器特性。由圖 2 ( a ) 可知 , 在最大工作電流范圍內 ,LED 光源功率與電流呈線性關系 , 光源具有良好的調制特性。圖 2 ( b ) 為使用積分球測得的白光 LED 發光光譜 ,可見白光 LED 光源發出的 光譜主要包括峰值在 442nm 處由LED 自身發出的藍光和峰值在 561nm 處由熒光粉受激發產生的黃光。 而實驗選用的光電探測器的光 譜最大響應靈敏度在 516nm 處 , 如圖 2 ( c ) 所示 , 位于藍光和黃光 的峰值波長之間 , 且光譜響應范圍涵蓋整個可見光波段。
8
4.2 驅動電路
LED 驅動電路除了提供足夠寬范圍的開關電流以保證白光 LED 的正常工作外 , 還須提供合適的靜態工作點 , 使光源能輸出足夠的功 率并具有良好的線性度 , 確保信號經調制后能線性輸出。設計的白光 LED光源驅動電路經過 STM89C52處理器編碼產生的傳輸信息作為驅 動電路的輸入 , 將輸入信號進行放大的同時給予一定的偏置 , 確保 LED 光源正常工作 , 該電路可根據所用光源的特性通過調節可變電阻值實
現對輸出量的改變 , 依據實際應用中的光源參數進行靈活調節。
9
4.3 數據編碼
數據傳輸的格式包括 : 起始碼頭、地址碼、地址反碼、指令碼、指令反碼和結束碼。 碼頭由一個連續的 235φs 的高低電平組成 , 結束 碼由一個 150φ s 低電平組成。地址碼、地址反碼、指令碼和指令反 碼均為 8 位數據格式 , 按照低位在前高位在后的順序發送 , 增加地址 反碼和指令反碼是為了提高信息傳輸過程中的準確性和可靠性。 光源 在循環發送位置信息的過程中 , 在空閑時隙系統向 LED 光源發送的 均為高電平 , 以保證 LED 光源能正常提供照明服務。 我們將一個邏輯 1 的傳輸設定為 112φ s(28 φs 高電平和 84φs 低電平 ), 一個邏輯 0 的傳輸設定為 56φ s(28 φs 高電平和 28φ s 低電平 ), 具體數據編碼格 式如圖 3.3 所示。圖 3.3 反映位置信息的數據格式 “ 0-256-34-221 ”, 其中“0 ”字段即 LED光源對應區域的地址坐標 , “34 ”字段表示 對當前坐標在室內環境中的一種具體提示指令。 根據標簽定位技術的 特點 , 為避免在定位區域中出現待測目標同時接收多個信號源發來的 位置信息而出現的混亂現象 , 系統在發射端會對多個 LED 光源進行 分時發送信號。 當傳輸信號的頻率大于 60Hz 時 , 白光 LED 燈不會出 現明顯的閃爍現象 , 人眼也無法分辨 [11-12 ] , 但如果出現連續的邏 輯1 或連續的邏輯 0 時 , 將會導致 LED 光源發光亮度發生變化 , 影 響照明效果。 因此在系統中采用上述編碼方式可保證序列中每一比特
10
由兩個變化脈沖組成 , 可以有效減少 LED 光源在發送定位信息時對
照明產生的影響。
圖 3.3 數據編碼示意圖
4.4 數據解碼
在接收端 , 光電探測器將接收到的位置信息傳送給濾波放大電路 , 由于實驗中選用的是反向放大電路 , 因此經過濾波放大處理后的信號 與原始信號的相位相反 , 并且信號被整形為 TTL ( 晶體管 - 晶體管 邏輯 ) 電平的串行信息 , 利用 STC89C52R處C 理器的輸入捕獲功能對信 號進行解碼。由于數據在編碼時將邏輯 1 設定為連續的 28 φ s 高 電平和 84s 低電平 , 邏輯 0 設定為 28φ s 高電平和 28φs 低電平 , 反 向放大電路會使收發信號相位相反 , 因此接收端成功接收到的邏輯 1 應當為連續的 28φs 低電平和 84 φ s 高電平 , 邏輯 0 應當為 28φ s 低 電平和 28φs 高電平。同時邏輯電平中的低電平持續時間均為 28 φ s, 所以在數據解碼時只需捕獲高電平的持續時間即能判定出邏輯電
平 , 進一步處理后即可解析出原始的位置信息 , 大大降低了解碼的復雜度。具體解碼過程為如下 : 將 STC89C52R處C 理器的輸入捕獲模式設 置為上升沿捕獲 , 當捕獲到上升沿后 , 立即將輸入捕獲模式設置為下 降沿捕獲 ( 即捕獲高電平 ), 隨后清零定時器的計數器值 , 并標記捕獲 到上升沿。當下降沿到來時 , 立即更改輸入捕獲模式為上升沿捕獲以
便捕獲下一次高電平 , 然后處理此次捕獲到的高電平。每次從捕獲起
始碼頭開始 , 以此類推直到捕獲到結束碼則表示一組數據接收成功。 如果在捕獲過程中地址碼與地址反碼或者指令碼與指令反碼有差異 , 則放棄本次捕獲 , 從新開始下一次捕獲。
4.5 識別映射
系統對所有用于定位的 LED 光源進行標號 , 不同的標號對應室 內環境中不同區域。每個 LED 光源都循環發送唯一的位置信息。當 移動終端移動到指定區域時 , 通過探測器將采集到的可見光信號轉換 為電信號 , 經濾波放大后通過 STC89C52R處C 理器對信息進行解碼。 當 系統解碼出發射端所發送的位置信息后 , 通過 UART 模塊將信息傳送 至 PC 終端 ,而室內環境中 LED 光源的實際位置信息預先存在數據庫中 , 當 PC 終端收到解碼后的位置信息時會通過查詢數據庫來進行比較和識別 , 只有比對一致的位置信息才會進一步被映射到地圖上 , 否則系統將放棄本次位置識別。 PC終端利用 C 高級語言編寫并設計 了室內可見光定位助手軟件 , 不僅可以根據環境需要靈活地更換地圖 信息 , 還可以根據移動終端的位置變化來實時更新當前的位置信息。
5 設計分析與計算
5.1 檢測 XY 軸坐標
本系統由 STC89C52RC最小系統板為核心,光敏傳感器根據光照 強度分別檢測 XY軸坐標。光敏傳感器是利用光敏元件將光信號轉換 為電信號的傳感器,用來檢測 XY軸距離。
5.2 A/D 轉換模塊
考慮到其他部分所帶來的干擾,所以我們選擇 24 位的 A/D 轉換器。作為電子秤,系統對 AD轉換速度要求并不高,精度上 24 位的 A/D 足以滿足要求。另外 A/D 轉化器具有:抗干擾能力強和精確差分 輸入,低廉的價格等優勢 . 綜合分析,我們最終選擇了精度為準確的 HX711。
5.3 鍵盤輸入
通過按鍵控制原點校正, 按校正按鍵將當前的數字量記錄下來并 設為基準值,根據新檢測的數字量相對基準值判斷 XY軸坐標。
5.4 電源模塊
此次設計的穩壓電源由電源變壓器、 整流電路、 濾波電路和穩壓電 路四個部分組成,如圖
5.5 電路原理框圖
5.6 結構尺寸圖
6 測試方案與測試結果
6.1 測試方案
6.1.1 硬件測試
穩壓電源的波形測試,比較穩定,符合要求,稱重傳感系統輸出信號 基本沒有受影響,顯示屏顯示正常,只要不在電位計盲區。 6.1.2 軟件仿真測試
通過 keil5 軟件在線調試,程序編譯正確,執行正常。延時等子程序 符合要求。 6.1.3 硬件軟件聯調
通過串口將程序下載至單片機中, 打開單片機電源開關, 系統能夠較 順利完成基本和發揮部分。
14
6.2 零件原理圖匯總
6.3 測試條件與儀器
測試條件: 檢查多次, 仿真電路和硬件電路必須與系統原理圖完全相同,并且檢查無誤,硬件電路保證無虛焊。測試儀器:高精度的數字 毫伏表,模擬示波器,數字示波器,數字萬用表。
7 軟件設計
可見光室內裝置設計均采用模塊化設計, 整個程序包括主程序、 數據 處理子程序 ( 雙字節乘法、二一十進制轉換程序及逆轉換程序 ) 、 LCD 液晶靜態顯示子程序等模塊。 所有程序均采用 C匯編語言編寫。 可見 光室內裝置的軟件設計思路說明如下:主程序的作用為程序初始化, 計算單價單重 ( 單價和單重分別在定時中斷程序和 INT0 外部中斷程 序中獲得 ) ,并時時顯示 X、Y 軸的坐標。
7.1 主程序流程圖
主程序流程圖給出了系統工作的基本過程,描述了信號的基本流向, 起到一個向導的作用。
主程序流程圖
15
傳感 開始 器檢 測
初始 化 LCD
AD轉 換數 據 X、 Y 軸的 坐標 顯示
8 程序清單(見附件一)
9 測試方案與測試結果
9.1 測試方案
9.1.1 硬件測試
穩壓電源的波形測試,比較穩定,符合要求,光敏傳感系統輸出信號 基本沒有受影響,顯示屏顯示正常,不在電位計盲區下滿足。 9.1.2 軟件仿真測試
通過 keil4 軟件在線調試,程序編譯正確,執行正常。延時等子程序 符合要求。 9.1.3 硬件軟件聯調
通過串口將程序下載至單片機中, 打開單片機電源開關, 系統能夠較 順利完成基本和發揮部分。
9.2 測試條件與儀器
測試條件: 檢查多次, 仿真電路和硬件電路必須與系統原理圖完全相同,并且檢查無誤,硬件電路保證無虛焊。
測試儀器:數字萬用表。
9.3 測試結果及分析
坐標 (0,0 ) (20,20 ) (-20,20 ) ( -20 ,-20 ) (20,-20 )
AD 數字量 96 118 112 103 105
經過測試,坐標值與 AD數字量成線性關系,整個系統精度較高,基 本滿足題目指標要求。
10 結論和總結
10.1 對設計的小結
此可見光室內定位裝置,總體結構簡潔、大方,底座等材料還屬于廢 品重新利用,符合可持續發展的環保道路,而且其構造穩固,有利于 系統性能的發揮。檢測出來的數據顯示,其總體性能比較好,機械性 能不錯,如果經濟允許,換上更加優質的元器件, 其性能會更加完美。
10.2 設計收獲體會
通過這次比賽,我們收獲匪淺。學到了很多全新的知識,比如 A/D 數模轉換, 更加深了對 AT89C52系統板的使用和性能; 在制作的過程中 一步一步走向目的地; 最重要的是這四天三夜的奮戰增強了我們的合 作精神,促進了我們的友誼!
10.3 對設計進一步完善的建議
1、部分材料可能可以選取更輕便的材料;
2、經濟允許,可以換上性能更加好的元器件;
3、機械結構的構架待加強
全部資料51hei下載地址:
 室內可見光定位裝置.pdf
(1.09 MB, 下載次數: 285)
室內可見光定位裝置.pdf
(1.09 MB, 下載次數: 285)
2018-2-8 23:16 上傳
點擊文件名下載附件
下載積分: 黑幣 -5
|




 [復制鏈接]
[復制鏈接]












 QQ好友和群
QQ好友和群 QQ空間
QQ空間 騰訊微博
騰訊微博 騰訊朋友
騰訊朋友 收藏
收藏 淘帖
淘帖 頂
頂 踩
踩


