完整的設計資料及源程序下載地址:
http://www.zg4o1577.cn/bbs/dpj-94085-1.html
下面是部分內容預覽(部分圖片可能不完整):
郵電大學畢業設計(論文) 設計(論文)題目: 基于單片機的紅外開關設計 學 院 名 稱 : 通信與信息工程學院
學 |
生 |
姓 |
名 |
: |
劉 斌 |
專 |
|
|
業 |
: |
電子信息工程 |
班 |
|
|
級 |
: |
0121006 |
學 |
|
|
號 |
: |
2010210755 |
指 |
導 |
教 |
師 |
: |
朱治國 |
摘要
隨著人們生活水平的不斷提高,科技的不斷進步。人們對生活的享受也越來越看 重了。作為家庭最不可或缺的電燈,也正在隨著科技的進步改變其帶給人們的舒適度。 最基本的照明已經不能滿足人們在現代生活的要求了。因此一盞能遙控并且能隨意改 變其亮暗程度的燈是十分重要的。本次畢業設計的就是基于單片機的紅外開關控制, 能有效的便捷的通過紅外線來控制家庭普通照明燈的開關和控制照明燈的亮度了,這 樣一來人們就可以根據房間的亮度需求和氛圍來控制燈光了。 本設計是對等的開關進行紅外遙控控制,總的系統分為紅外遙控發射端和接收端, 中間涉及到進行紅外的編碼與解碼,矩陣鍵盤,電源電路,可控硅調光電路,過零檢 測的設計,數碼管顯示的設計。發射端和接收端都是采用 89C51 單片機作為核心芯 片。 通過各種論證和仿真最后實現了對對 8 路小燈的開關進行控制,對其中一個小燈 進行了調光控制,可以改變 8 種亮度,方便人們的需求。遙控和接收端都設置了顯示 按鍵值得數碼管,方便人們知道當前控制的是哪個燈。 這種紅外開關在人們的日常生活中使用性是比較好的,也是比較可靠的,能滿足 人們對生活方便,快捷,使用性的追求。
前 言 隨著科技的不斷發展,單片機技術,紅外線技術也在飛速發展。單片機誕生于 1971 年,隨之得到飛速發展,被運用在各種領域,工業、農業、國防、科研、機關、 教育、商業以及家電等。紅外遙控也是 20 世紀 70年代才開始逐漸發展起來的一種遠 程控制技術,原理:是利用紅外線來傳遞信號,對控制對象進行遠距離控制。經過幾 十年的發展,遙控器已經出現在了我們生活中的每一個角落。我們會發現,在我們當 今的生活中已經離不開遙控器了,家用電器都配有一個遙控器。這樣一來我們會發現, 我們家中隨處都是遙控器,如:電視,電風扇,空調,冰箱等的遙控器。但是帶有遙 控器的照明燈還沒有流行起來,雖然市場上也有很多這樣的照明燈。 也正是這樣我觸發我想對這以課題的研究,如果我們能把家用的所有遙控器都解 碼出來,用一個遙控器來控制較多電器,這樣我們就不需控制家用電器的時候到處找 相應的遙控器了,這個技術在目前市場上還沒有流行起來,中間還存在許多技術難題, 也許在將來會進入我們的家庭生活。 本次設計主要是用遙控器來控制家庭的多路開關,能用一個遙控器來控制家中較 多的電器電源開關。主要是針對家庭照明燈來設計的,由于我們家中電燈是比較多的, 每一個燈都需要設計專門的電路開關來控制,這樣以來,浪費了很多電路設計也不利 于家庭整體設計的美觀。而且每一個燈的亮度都是固定死了的,我們主要是設計一個 遙控器來控制我們家中的電燈,并且可以通過可控硅調控電燈的亮度。根據市場需求, 這種設計在當今生活中需求性是很高的,其實用價值也是很高的。
第一章 單片機與紅外線概述 第一節 單片機的發展歷史及趨勢 一、單片機的發展過程
單片機誕生于 20 世紀 70 年代末,單片機的發展歷史可劃分為以下幾個階段: 第一階段(1974 年~1976 年):為單片機初級階段,即 SCM 單片微型計算機 (SingleChipMicrocomputer)階段。主要是尋求最佳的單片形態嵌入式系統的最佳體系 結構。 第二階段(1976 年~1978 年):為低性能單片機階段,即單片機的控索階段。以 Intel 公司的 MCS—48 為代表。MCS—48 的推出是在工控領域的控索,參與這一控索的公 司還有 Motorola、Zilog 等,都取得了滿意的效果。“單片機”一次由此得來。此時的 單片機 由一塊芯片構成,但性能低、品種少。 第三階段(1978 年~1982 年):單片機的完善階段。Intel 公司在 MCS—48 基礎上推 出了完善的、典型的單片機系列 MCS—51。 第四階段(1982 年~1990 年):8 位單片機的鞏固發展及 16 位單片機的推出階段, 是 單片機向微控制器發展的階段。Intel 公司推出的MCS— 96 系列單片機,將一些用于 測控系統的模數轉換器、程序運行監視器、脈寬調制器等納入片中,體現了單片機的 微控制器特征。 第五階段(1990 年~):微控制器的全面發展階段。隨著單片機在各個領域全面深入 地發展和應用,出現了高速、大尋址范圍、強運算能力的 8 位 16 位 32 位通用型單片 機,以及小型廉價的專用型單片機。
二、單片機的發展趨勢
90 年代后期至今單片機的發展可以說是進入了一個新的階段,單片機正朝著高性 能和多品種方向發展,發展趨勢將是進一步向著CMOS 化、低功耗、小體積、大容量、 高性能、低價格和外圍電路內裝化等幾個方面發展。其發展趨勢主要有以下幾個方面: ①制作工藝 CMOS 化。 ②更小的光刻工藝提高了集成度,使芯片更小、成本更低、工作電壓更低、功耗更低。
③CPU 的改進。采用雙 CPU 結構增加數據總線的寬度,提高數據處理的速度和能力。 ④增大存儲容量。
⑤提高并行口驅動能力,以減少外圍驅動芯片。
⑥以串行方式為主的外圍擴展。
⑦外圍電路的內裝化。
⑧和互聯網連接已是一種明顯的走向。
⑨可靠性及應用水平越來越高
第二節 紅外線簡介 一、紅外線的認識 紅外線又稱紅外光波,在電磁波譜中,光波的波長范圍為 0.01um~1000um 根據 波長的不同可分為可見光和不可見光,波長為0.38um~0.76um 的光波可為可見光,依 次為紅、橙、黃、綠、青、藍、紫七種顏色。光波為 0.01um~0.38um 的光波為紫外光 (線),波長為 0.76um~1000um 的光波為紅外光(線)。紅外光按波長范圍分為近紅外、 中紅外、遠紅外、極紅外 4 類。紅外線遙控是利用近紅外光傳送遙控指令的,波長為 0.76um~1.5um。用近紅外作為遙控光源,是因為目前紅外發射器件(紅外發光管)與紅 外接收器件(光敏二極管、三極管及光電池)的發光與受光峰值波長一般 0.8um~0.94um, 在近紅外光波段內,二者的光譜正好重合,能夠很好地匹配,可以獲得較高的傳輸效 率及較高的可靠性。 二、紅外線的發射原理
紅外編碼有很多種方式,下面列舉兩種實現方案: 方案一:脈寬調制的串行碼。家用電器如電視機、VCD,DVD 等的遙控器都是用這種 編碼方式。但是本次設計不采用這種編碼方式,因為這種編碼方式要用到專用的集成電路芯片來進行編解碼,不是很方便。但是原始想法還是采用這種編碼方式的,在此也簡單的介紹下這種編碼方式。
這種編碼采用的是 0 和 1 來編碼,遙控器按鍵按下后,便有遙控碼發出,按鍵 不同,遙控編碼也不同。 它是以脈寬 0.565ms,間隔位 0.56ms,周期為 1.125ms 來表示 0;以脈寬 0.565ms,間隔 1.685ms,周期 2.25ms 表示二進制 1。波形如圖: 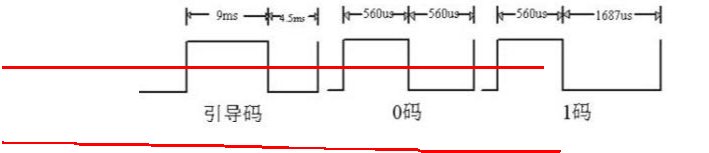
圖 2-1 串行碼編碼
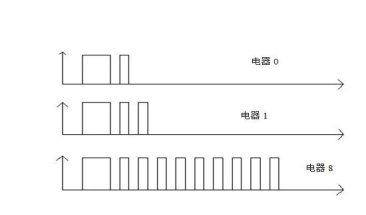
遙控器發射信號由一串的 0 和 1 二進制代碼組成,由于芯片的不同,對 0 和 1 的 編碼也不同。TC9012 采用的是脈沖寬度調制。在編寫解碼程序時,通過判斷脈沖的 寬度便可得到 0 和 1.UPD6121G 產生的遙控編碼是連續 32 位二進制碼,其中前 16 為碼為用戶識別碼, 其特點是:能區別不同電器設備,防止不同遙控碼的相互干擾。這種芯片的用戶識別 碼為固定的十六進制 01H;后 16 位為 8 位操作碼和其反 碼。當遙控器按鍵按下后, 周期性地發出同一種 32 位二進制碼,周期約為 108ms。按鍵的編碼 當我們按下遙控 器的按鍵后,遙控器發出如圖 2 的一串二進制代碼。根據各部分的功能。它們可分為5 部分:引導碼、用戶識別碼、用戶識別碼反碼、數據碼、數據反碼。遙控器發射代 碼時.都是低位在前,高位在后。由圖 3 可以得到.引導碼高電平為 4.5ms,低電平 為 4.5ms,當接收到此碼時,表示一幀數據的開始。單片機便可以準備接收下面的數 據了。用戶識別碼是由 8 位二進制組成,共 256 種.圖中地址碼重發了一次,主要是 為了加強遙控器的可靠性.如果兩次地址碼不相同,則說明本幀數據出錯,應丟棄。 不同的設備可用戶識別碼也是不同的.由于地址碼的不同,不同設備間是不會產生相 互干擾的。同一個遙控器中,所有按鍵發出的地址碼是相同的。數據碼為 8 位,可編 碼 256 種狀態,代表用戶所按下的鍵。數據反碼是數據碼的求反,通過比較數據碼與 數據反碼,便可判斷接收的數據是否正確。若數據碼與數據反碼不是相反的關系.則 本次遙控接收有錯,數據應丟棄。由于其編碼和解碼方式很復雜,故不選用這種方案。 方案二:碼分制。采用脈沖個數編碼,不同的脈沖個數代表不同的被控對象,最小為 2 個脈沖。為了使接收可靠,第一位碼寬為 3ms,其余為 1ms,遙控碼數據幀間
 隔大于 10ms,如圖 2-2 所示。
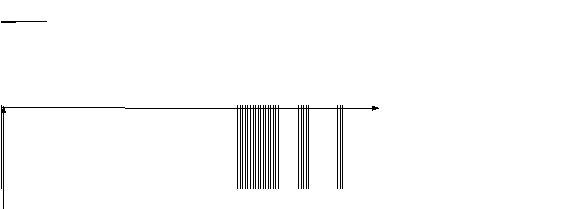
圖 2-2 碼分制編碼波形圖
本設計采用方案二,碼分制編碼編程非常簡單,在按鍵較少的情況下優勢明顯, 實用性比較強。在簡單的紅外遙控器設計中,用的按鍵并不是很多,所以沒必要用串 行碼來編碼,雖然串行編碼的穩定性和保密性比較高,但是這些要求我們并不是很需 要。我們只是做家用電燈開關的控制,如果能做到最簡單,成本越低這樣越實用。不 需要像專業領域那樣,比如一個品牌的遙控器就必須有他們自己的編碼方式。綜合各 方面考慮,最終決定用碼分編碼來設計遙控器。
第二章 單片機系統總的設計
第一節 方案選擇
一、 功能需求
我們來設計紅外遙控開關,首先得有一個遙控信號輸出端,也得有一個專門的接 收端,來根據遙控信號做專業的處理。所以就必須得用到單片機,我用一個單片機片 控制發射端,另外一個單片機控制接收端。遙控器最基本的組成就得有很多按鍵,來 作為我們人為信號的輸入,像單片機輸入信號,從簡單的角度出發,易操作,易實行, 我選用 4×4 矩陣鍵盤,這樣便可以控制 16 路電器的開關,但是我實際只用到 8 個按 鍵開關,另外 8 個開關按鍵本次設計中沒用到,用法其實都一樣,這里暫且不用,可 以作為需要時的擴展處理。要對電燈開關控制,僅僅只有遙控器也是不行的,必須在 燈的控制端設計專門的遙控設計處理設備,這里是用單片機作為主要控制芯片,外接 單片機電源電路,燈光亮度調節電路,這樣我們就能有效的來控制我們的家用電燈了。
二、方案論證
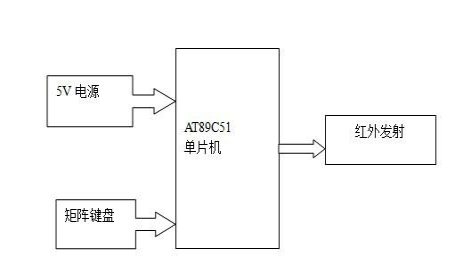
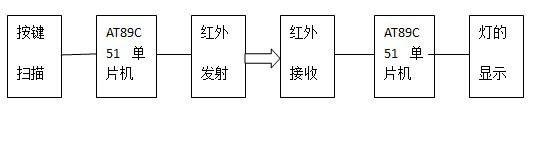 目前市場上一般都是采用的專用的遙控編碼及解碼集成電路。此方案具有制作簡 單易行的特點。本次設計單片機遙控應用系統采用紅外線脈沖個數編碼,具有編碼靈 活,操作碼個數可隨意設定的優點實現對 8 個小燈的開關控制,其中一路為一個交流 電燈,可以進行亮度遙控。其設計原理框圖如圖 2.1。 目前市場上一般都是采用的專用的遙控編碼及解碼集成電路。此方案具有制作簡 單易行的特點。本次設計單片機遙控應用系統采用紅外線脈沖個數編碼,具有編碼靈 活,操作碼個數可隨意設定的優點實現對 8 個小燈的開關控制,其中一路為一個交流 電燈,可以進行亮度遙控。其設計原理框圖如圖 2.1。
圖 2.1 紅外開關系統組成 遙控發射端的數據輸入是我們人來控制遙控器上面的按鍵,通過按鍵的電平變 化來指示單片機,我們此時是按的哪個鍵。單片機接收到我們按鍵信號,再根據我們 向單片機置入的程序,根據程序來進行相應的脈沖編碼,通過紅外發射管向空間發射脈沖信號。 接收端,首先紅外接收器不停的對空間的紅外信號進行檢查,一旦檢測到與我 們人為要求相符合的脈沖信號時,此時通知單片機,進行信號檢測,如果是我們需要 的信號,此時便進行信號接收。然后單片機對接收到的信號進行處理,然后根據我們 向單片機置入的程序進行相應的子程序操作。最后便進行燈光亮滅和燈光亮度控制。 本系統設計了對小燈的亮度進行調節,使小燈能在 0—7 這 8 個亮度間隨任務調 節而改變。這里我初期有兩個選擇:一是用PWM 調光原理來進行調光控制;二是用 物理的可控硅進行調光控制。 1.PWM 調光控制調光 脈寬調制(PWM)是利用微處理器的數字輸出來對模擬電路進行控制的一種非 常有效的技術。通過高分辨率計數器的使用,方波的占空比被調制來對一個具體模擬 信號的電平進行編碼。簡單的說就是占空比越大,平均電壓越大,燈也就越亮,占空 比越小, 平均電壓越小,燈也就越暗。這種調光技術的優點在于應用簡單、效率高、 精度高,且調光效果好,確定是由于一般 LED 驅動器都基于開關電源原理,如果 PWM 調光的頻率在 200-20KHz 之間時,LED 驅動器周圍的電感和輸出電容容易產生人耳 聽得見的噪聲。 2.可控硅調光
可控硅調光是目前白熾燈調光應用中最普遍的一種調光方式。其原理是將輸入電 壓的波形通過導通角切波之后,產生一個切向的輸出波形。即是通過改變可控硅導通 角來改變燈光亮度的。 本次設計采用的便是可控硅調光技術。可控硅調光是一種物理的調光,PWM 調 光是通過脈沖調光,其原理不一樣。因為我們選擇家用白熾燈進行調光對象,選可控 硅調光更佳。PWM 調光技術一般是針對直流 LED 燈。而白熾燈燈是交流燈,選用 可控硅控制比較好,具體優點有如下兩點: ①調節精度高、效率高 可控硅調光器電路簡單,可以對白熾燈進行調光,而且 可以把電路的體積做很小,其電路中加入過濾器后可以使得通過電路的電流更加穩定, 調節的燈光柔和穩定,無頻閃現象。在光的強度調節過程中,光線的強弱會平穩調節, 調節準確、效率高。 ②開機亮度記憶 如今的調光器除了具有調節精度高、體積小等優點外,還具備 開機亮度記憶功能。這個功能可以記住上一次開燈時燈光的亮度,將照明亮度穩定在 一個舒適的程度,不必每次打開電燈時都重新調節。 ③可以避免脈寬調光過程中產生的大量噪聲和高次諧波。
第二節 總的遙控設計
首先本次設計題目基于單片機的紅外控制,核心控制芯片便是 AT89C51 單片機, 然后便是用到紅外線,設計到紅外線的編碼解碼。發射端遙控設計如圖 2.2,矩陣鍵 盤是必須的硬件用于輸入數據,+5V 電源電壓是由普通電池來提高,發射端的結構 很簡單。
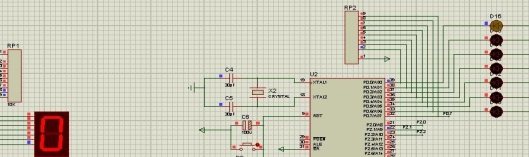
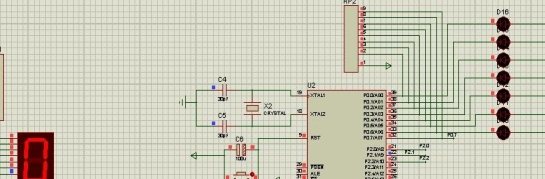
圖 2.2 為發射遙控設計圖 接收端的遙控設計如圖 2.3。+5V 電源是由 220V 交流電變壓轉換而來的,因為 單片機是需要+5V 電源電壓來驅動的,而此時接收端是與電燈結合在一起的,我們 就沒必要和發射端那樣,用電池來驅動,直接可以用家用交流電變壓而得到,這樣更 方便安裝和控制,所以我設計了一個專門的+5V 電源電壓電路。50Hz 交流過零檢測 電路也是由 220V 交流電提供的,用來控制可控硅。紅外接收電路用來接收發射端發 射的脈沖信號,經單片機處理后,控制 8 個小燈的電源開關和一個交流燈的亮度,同 時對按鍵值進行顯示。具體硬件電路和軟件程序設計在后面章節進行詳細敘述。
圖 2.3 為接收遙控設計圖。
第三章 系統硬件設計
第一節 硬件介紹
一、定時器計數器
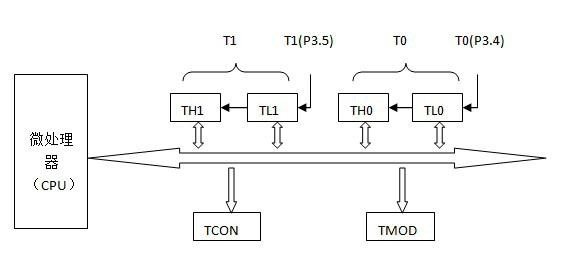
它的組成是由兩個 16 位的定時器 TO 和 T1,以及他們的工作方式寄存器 TMOD 和控制寄存器 TCON 等組成。定時器/計數器 T0 和T1 都是由兩個 8 位特殊功能寄存 器 THO、TLO、TH1、TL1 構成的。工作方式寄存器 TMOD 是用于設置定時器的工 作模式和工作方式;控制寄存器 TCON 是用于啟動和停止定時器的計數,控制定時 器的狀態。當單片機復位時,兩個寄存器的所有位都被清 0。 AT89C51 單片機的定時器/計數器的結構如圖 3.1
圖 3.1 89C51 定時器/計數器結構圖 (1)工作方式寄存器 TMOD
定時器/計數器工作方式寄存器 TMOD 的各位定義如如表 3.1。
標 3.1 定時器/計數器工作方式寄存器 TMOD
位序號 | D7 | D6 | D5 | D4 | D3 | D2 | D1 | D0 | 位符號 | GATE | C/T | M1 | M0 | GATE | C/T | M1 | M0 |
如表,TMOD 的高 4 位用于設置定時器 1,低 4 位用于設置定時器 0,對應的 4 位符號含義如下: GATE:門控制。GATE=0,定時器/計數器啟動與停止僅受 TCON 寄存器中 TRX (X=0,1)來控制;GATE=1,定時器/計數器啟動與停止受 TCON 寄存器中 TRX(X=0, 1)和外部中斷引腳(TNT0 或 TNT1)上的電平狀態來共同控制。 C/T:定時器模式和計數器模式選擇位。C/T=1 為計數器模式,計數脈沖為外部 引腳 T0 或 T1 的引入的外部脈沖信號;C/T=0,為定時器模式,計數脈沖由內部提供, 計數周期等于機器周期。 M1M0:工作方式選擇位 (2)控制寄存器 TCON 定時器/計數器控制寄存器 TCON 如表 3.3
表 3.2 定時器/計數器控制寄存器 TCON
位序號 | D7 | D6 | D5 | D4 | D3 | D2 | D1 | D0 | 位符號 | TF1 | TR1 | TF0 | TR0 | IE1 | IT1 | IE0 | IT0 | 位地址 | 8FH | 8EH | 8DH | 8CH | 8BH | 8AH | 89H | 88H |
TF1:定時器 1 溢出標志位。當定時器 1 計滿溢出時,由硬件使 TF1 置 1,并且 申請中斷。進入中斷服務程序后,由硬件自動清 0 TR1:定時器 1 運行控制位。由軟件清 0 關閉定時器 1.當 GATE=1,且 INT1 為 高電平時,TR1 置 1 啟動定時器 1;當 GATE=0時,TR1 置 1 啟動定時器 1. TF0:定時器 0 溢出標志,其功能及操作方法同 TF1。 TR0:定時器 1 運行控制位,功能及操作方法同 TR1。 IE1:外部中斷 1 請求標志。當 IT1=0 時,為電平觸發方式,每個機器周期的 S5P2 采樣 INT1 引腳,若 INT1 腳為低電平,置1,否則 IE1 清 0.當 IT1=1,表示外 部中斷 1 正在向 CPU 申請中斷。當 CPU 響應中斷,轉向中斷服務程序時,該位由硬 件清 0. (3)4 種工作方式 每個定時器/計數器都有 4 種工作方式,它們由 MIM0 設定,對應關系如表 3.1。
表 3.3 定時器/計數器 4 中工作方式
M1 | M0 | 工作方式 | 0 | 0 | 方式 0,為 13 位定時器/計數器 | 0 | 1 | 方式 1,為 16 為定時器/計數器 | 1 | 0 | 方式 2, 8 位初值自動重裝的 8 位定時器/計數器 | 1 | 1 | 方式 3,僅實用于 T0,分成兩個 8 為計數器,T1 停止計數 |
在這里簡單介紹下定時器/計數器工作方式 0 和 2.
方式 0
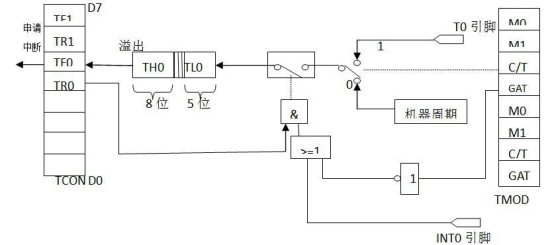
通過設置 TMOD 寄存器中的 M1M0 位為 00 選擇定時器方式 0,方式 0 的計數位 數是 13 位,對 T0 來說,由 TL0 寄存器的低 5 位(高 3 位沒用)和 TH0 的 8 位組成。 TL0 的低 5 位溢出時向 TH0 進位,TH0 溢出時,置位 TCON 中的 TF0 標志,向 CPU 發出中斷請求。其邏輯結構框圖如圖 3.2。
圖 3.2 定時器方式 0 邏輯結構框圖 由于定時器方式 0 為 13 位計數器,最多能裝載的數為=8192 個,當 TL0 和 TH0 的初值為 0 時,最多經過 8192 個機器周期該計數器就會溢出一次,向 CPU 申請中斷。 當用定時器的方式 0 工作時,設機器周期為,定時器產生一次中斷時間為 t,那么需 要計數的個數N=t/,裝入 THX 和 THX 的數分別為 THX=(8192-N)/32,TLX=(8192-N)%32 計數機器周期,用 12MHz 晶振時,機器周期為 12X(1/12000000)=1us,如果 t=5ms, 那么 N=5000/1=5000。
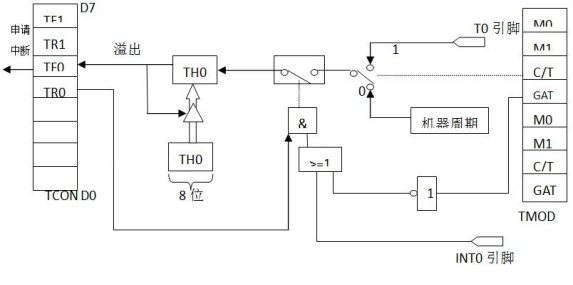
方式 2 在定時器的方式 0 和方式 1 中,當計數溢出后,計數器變為 0,因此在循環定時 或循環計數時必須要用軟件反復設置計數初值,這必然影響到定時的精度,同時也給 程序設計帶來很多麻煩。定時器方式 2 變可解決軟件反復裝初值所帶來的問題。 方式 2 被稱為 8 位自動重裝的 8 位定時器/計數器,THX 被作為常數緩沖器,當 TLX 計數溢出時,在溢出標志 TFX 置 1 的同時,還自動地將 THX 中的常數重裝入 TLX 中,使 TLX 從初值開始重新計數,這樣避免了人為軟件重裝初值帶來的時間誤 差,從而提高了定時的精度。 定時器方式 2 的邏輯結構框圖如圖 3.3。
圖 3.3 定時器方式 2 邏輯結構圖 由于定時器方式 2 為 8 位計數器,最多可以裝載的數為=256 個,當 TL0 和 TH0 的初值為 0 時,最多經過 256 個機器周期該計數器就會溢出,若使用 12MHz 晶振, 也只有 256us 的時間。當用定時器方式 2 時,設機器周期為,定時器產生一次中斷的 時間為 t,那么需要計數的個數 N=t/ THX=256-N TLX=256-N 機器周期=12X (1/12000000 )=1us ,以 1s 為列,當計 256 個數時,需耗時 1X256=256us。再來計算定時 1s 計數器需一次多少次,即 1000000/256≈3906。由于 定時器方式 2 能有效降低時間誤差,故本次設計采用的是方式 2 的工作方式。
二、鍵盤開關
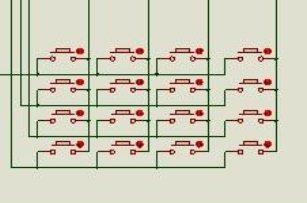
鍵盤實際上是組按鍵,在單片機外圍電路中,通常用到的按鍵都是機械彈性開關, 當開關閉合時,線路導通,開關斷開時,線路斷開。因此鍵盤也能在單片機中充當數 據輸入的作用。單片機按鍵檢測的原理是:單片機的 I/O 口既可以作為輸出也可以作 為輸入使用,當檢測按鍵時用的是它的輸入功能,我們把按鍵的一端接地,另外一端 與單片機的 I/O 口相連,開始時先給 I/O 口賦一高電平,然后讓單片機不斷的檢測該 I/O 是否變為低電平,當按鍵閉合時,即相當于該 I/O 口通過按鍵與地相連,變成低 電平,程序一旦檢測到 I/O 口變為低電平則說明按鍵被按下,然后執行相應指令。 矩陣鍵盤的工作原理:此處用到的是 4×4 矩陣鍵盤如圖 3.4,將 16 個按鍵排成 4 行 4 列,一行將每個按鍵的一端連接在一起構成行線,第一列將每個按鍵的另外一 端連接在一起構成列線,我們將 8 根線連接到單片機的 8 個 I/O 端口上,本設計接的 是 P3 口。檢測時先送一列為低電平,其余全為高電平,然后立即輪流檢測各行是否 有低電平,若檢測到某一行為低電平,便可知道被按下的是哪個鍵了
圖 3.4 4×4 矩陣鍵盤
三、數碼管
數碼管按段數可分為七段數碼管和八段數碼管,八段數碼管比七段數碼管多一個 發光二極管單元(多一個小數點顯示);按能顯示多少個(8)可分為 1 位、2 位、3 位、4 位、5 位、6 位、7 位等數碼管。如圖 3.5(a)所示,一位數碼管的引腳是 10 個,顯示 8 字需要 7 個小段,另外還有一個小數點,所以其內部一共有 8 個小的發光 二極管,最后還有一個公共端,由于其公共端,它又可以分為共陰極和共陽極,圖 3.5(b)為共陰極內部結構原理圖,圖 3.5(c)為共陽極內部結構原理圖。我選用的 是共陰極的。對于共陰極,8 個發光二極管的陰極在數碼管內部全部鏈接在一起,他 們的陽極是相互獨立的,通常把陰極接地。當我們把陽極加高電平時,此時數碼管就 亮了。如果要讓數碼管按我們的想法去實現相應的顯示,我們就得編寫程序來控制數 碼管使它的 8 個發光二極管按要求來點亮,顯示我們需要的數字。如果我們用到比較 多的數碼管,而單片機又沒有這么多 I/O 接口時,就會用到鎖存器來控制數碼管,進 行短選和位選,控制相應的數碼管顯示我們需要的數值。要控制數碼管就必須涉及到 數碼管的編碼。
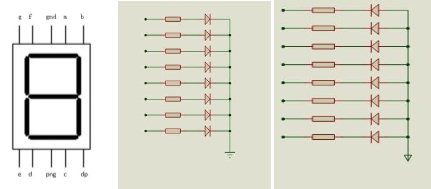 (a)引腳 (b)共陰極 (c)共陽極
圖 3.5 數碼管內部原理圖
表 3.4 就是共陰極的數碼管編碼方式,不同的電路編碼方式是不同的,共陰極和 共陽極的編碼方式也是不一樣的,這里我們簡單的了解下共陰極的編碼方式。表 2.1 中就是不同的字符對應一個編碼值,要想顯示出準確的數值,就要用單片機向數碼管 輸出其對應的編碼值。
表 3.4 共陰極數碼管編碼
符號 | 編碼 | 符號 | 編碼 | 0 | 0x3f | 8 | 0x7f | 1 | 0x06 | 9 | 0x6f | 2 | 0x5b | A | 0x77 | 3 | 0x4f | b | 0x7c | 4 | 0x66 | C | 0x39 | 5 | 0x6d | d | 0x5e | 6 | 0x7d | E | 0x79 | 7 | 0x07 | F | 0x71 |
四、CD4511 譯碼器
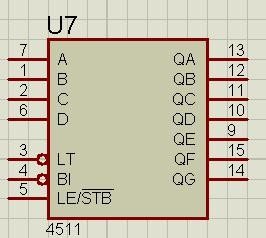
CD4511 是一片 CMOS BCD—鎖存/7 段譯碼/驅動器,用于驅動共陰極 LED(數碼管)顯示器的 BCD 碼—七段碼譯碼器。其特點是:具有 BCD 轉換、消隱和 鎖存控制、七段譯碼及驅動功能的 CMOS 電路能提供較大的拉電流。可直接驅動 LED 顯示器。其引腳圖 3.6。
其功能介紹如下: 圖 3.6 CD4511 引腳圖
A、B、C、D 為 8421BCD 碼輸入端。 QA、QB、QC、QD、QE、QF、QG:為譯碼輸出端,輸出為高電平 1 有效。 BI:4 腳是消隱輸入控制端,當 BI=0 時,不管其它輸入端狀態如何,七段數碼管 處于熄滅(消隱)狀態,不顯示數字。LT:3 腳是測試輸入端,當 BI=1,LT=0 時,譯碼輸出全為 1,不管輸入 DCBA狀 態如何,七段均發亮,顯示“8”。它主要用來檢測數碼管是否損壞。 LE:鎖定控制端,當 LE=0 時,允許譯碼輸出。 LE=1 時譯碼器是鎖定保持狀態, 譯碼器輸出被保持在 LE=0 時的數值。CD4511 的內部有上拉電阻,在輸入端與數碼 管筆段端接上限流電阻 在本次設計中就用到了 CD4511 來驅動數碼管顯示交流電燈的亮度值。
五、可控硅
可控硅,是可控硅整流元件的簡稱,是一種具有三個 PN 結的四層結構的大功率 半導體器件,亦稱為晶閘管。具有體積小、結構相對簡單、功能強等特點,是比較常 用的半導體器件之一。該器件被廣泛應用于各種電子設備和電子產品中,多用來作可 控整流、逆變、變頻、調壓、無觸點開關等。家用電器中的調光燈、調速風扇、空調 機、電視機、電冰箱、洗衣機、照相機、組合音響、聲光電路、定時控制器、玩具裝 置、無線電遙控、攝像機及工業控制等都大量使用了可控硅器件。本次設計正是用它 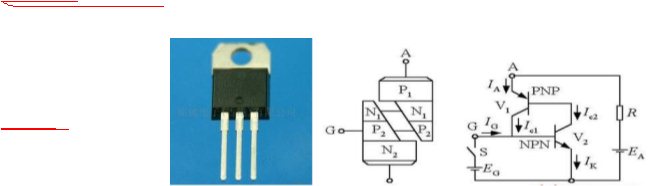 來控制交流電燈的亮度的。 來控制交流電燈的亮度的。
圖 3.7 可控硅實物圖與結構圖
一、發射電路 第二節 電路設計 圖 3.8 是發射部分的電路原理圖。其組成是由一塊 AT89C51 單片機為控制核心, +5V 電源電路,4X4 矩陣鍵盤,數碼管顯示端和紅外發射電路。其中紅外發射電路如 圖 。其工作原理是單片機的定時器 1 中斷產生40Khz 紅外方波信號,再由單片機的 P3.4 口輸出,由三極管放大后向接收端發射。數碼管顯示的值是矩陣鍵盤的按鍵值, 以讓我們使用時能清楚的知道當前按下的是那個鍵。數碼管是與單片機的 P0 口相接 的,由于單片機 P0 口是沒有拉高電阻的,不能正常地輸出高低電平,所以此端要外 接拉高電阻,一般我們選擇介入 10KΩ的上拉電阻。P2 作為鍵掃描端口,我選擇了4×4 矩陣鍵盤,因此可以控制 16 個按鍵,可分別控制單片機發出 16 種不同脈沖, 執行 16 種操作,本次設計實際只用其中 8 個按鍵開關,另外 8 個作擴展用。
圖 3.9 接收部分電路原理圖
三、電源電路
圖 3.10 中是本次設計用到的電源電路圖。220V 交流電經過變壓器變壓后,再經 過由 4 個二極管組成的橋式電路整流成直流電壓,再由一個極性電容來濾波。如果要 想得到一個穩定的電壓,需要用到比較常用的 LM7805 三端穩壓器來穩壓后再經過電 容濾波和阻尼作用后才可以輸出 5V 電源電壓,用來驅動我們的單片機。
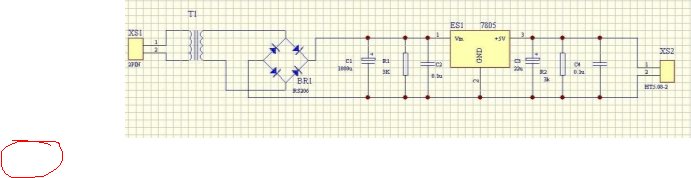 圖 3.10 電源電路圖
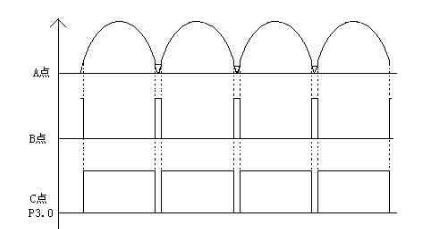
四、過零檢測電路 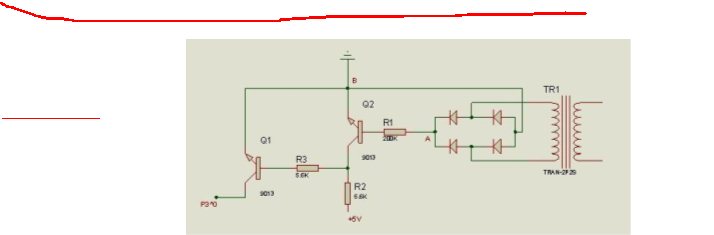 交流電過零檢測電路如圖 3.11 交流電過零檢測電路如圖 3.11圖 3.11 過零檢查電路圖
本次設計用到了可控硅來控制電燈的亮度,因此必須用到過零檢測電路,來使可 控硅在過零點關斷。過零檢測電路的組成主要有橋式整流電路,和兩個 9013 三極管。 其中 P3^0 是與單片機端口相連的,向單片機輸入 50HZ 的正旋波形。當=>=0.7V 時, Q2 三極管導通,Q1 三極管截止,B 點為低電平,P3^0 為高電平;當 UA=UBE<0.7 時,Q2 截止,Q1 導通,B 點為高電平,P3^0 為低電平。 過零檢測電路中各點波形如下:
圖 3.12 過零檢測電路各點波形
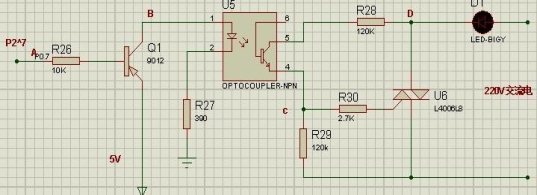
五、電燈亮度控制電路
要想實現用單片機控制家用照明燈,就必須還得有外圍電路來控制家用電燈的亮 度調節。具體的電路是用可控硅來控制的,圖3.13 就是控制電路圖,前面已經提到, 本次設計是用可控硅來控制的。 由圖可知,其主要組成部分是光電耦合器,可控硅,PNP 三極管。由于單片機 端電流是比較低的,而控制電路是 220V 交流市電,因此需要用到光電耦合器來來起 隔離作用,防止外部電路故障影響到單片機芯片;單片機有多個輸入口,都在接收來 自外來設備的信號,如果環境比較差時,會存在較大的噪聲干擾,導致準確性降低, 產生誤差,因此要用到光電耦合器對信號和噪聲進行隔離。 P2.0 口可以控制電燈的開關,可控硅的導通角來控制電燈的亮度。具體的工作 原理是:單片機產生控制可控硅的移相脈沖,通過移相角的改變來改變導通角,當移 相角大時,可控硅導通角小,輸出的電壓較低,電燈比較暗;當移相角小時,可控硅 導通角大,輸出電壓高,電燈比較亮。 具體的實現方式是:在過零點后一段時間才觸發可控硅導通,這段時間稱為延時時間, 延時時間越長,可控硅的導通時間就越長,燈的亮度就越亮;反之,燈就越暗。
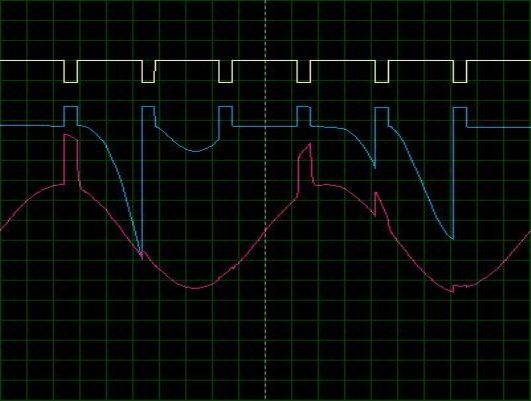
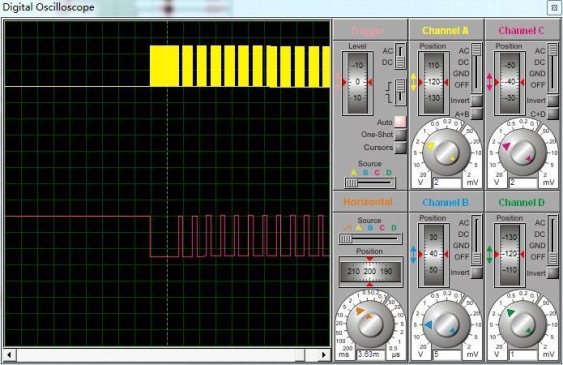
圖 3.13 電燈亮度控制電路圖 當單片機的 P2-7 口為低電平時,9012 三極管導通。此時集電極電流驅動光電耦 合器導通,使可控硅 G 極產生脈沖信號來觸發可控硅導通。當單片機的 P2.7 口為高 電平時,三極管,光電耦合器還有可控硅都是截止狀態。可控硅導通角控制的電路中 的波形如圖3.14。但是實際仿真波形圖與理論的波形圖有區別,可能是硬件接線,或 者軟件問題,在脈沖到達時會出現跳變現象。具體波形如圖3.15,3.16,,3.17。 圖 3.15 是亮度為 7 時的波形圖,圖 3.16 為 4 時的波形圖,圖 3.17 為亮度為 1 時 的波形圖。圖中黃色波形是單片機輸出脈沖,藍色波形是可控硅的觸發脈沖,紫色波 形是 220V 交流波形。兩個觸發脈沖間對應的部分為可控硅導通區域,從圖 3.14 可以 清楚看出。從圖中可以看出亮度為 7 時導通區域大于亮度為 4 大于亮度為 1 時的導通 區域,因此亮度為 7 是最亮,依次是亮度為 6,依次類推,亮度為 0 最暗,這個具體的延時,在軟件部分介紹。
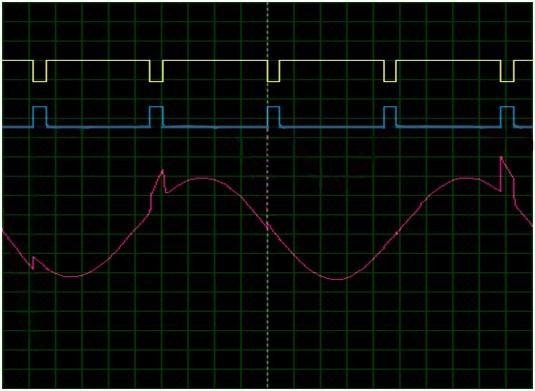 圖 3.14 可控硅導通角控制的電路各點波形 圖 3.14 可控硅導通角控制的電路各點波形
圖 3.15 燈光亮度為 7 時的各點波形圖
圖 3.16 燈光亮度為 4 時的各點波形圖
圖 3.17 燈光亮度為 1 時的各點波形圖
第四章 系統軟件設計
第一節 發射和接收部分的工作原理
一、發射部分的工作原理
發射系統開始運行時,單片機首先調用程序里面的按鍵掃描子程序,按鍵掃描子 程序不停的掃描 16 個按鍵,檢測是否有按鍵按下,無按鍵按下時,系統處于等待狀 態;一旦有按鍵按下時,單片機根據按鍵值,然后轉入發射子程序,發射子程序根據 預定的要求裝入不同的脈沖個數,然后調制成 40KHz 的載波信號,通過單片機的 P3.5 口發出,為了提高抗干擾和降低能耗,經過三極管放大后然后由紅外發射管想空中發 射。 編碼方式是采用碼分編碼,通過不同的脈沖個數來編碼的。不同的脈沖個數代表 不同的編碼,按鍵 0 的編碼的脈沖個數是 2,按鍵1 是 3 個脈沖,依次類推,按鍵 15 是 17 個脈沖。為了接收可靠,第一位碼的碼寬我們設計成 3ms,其余的為 1ms,遙 控的數據幀間大于 10ms。 圖 4.1 P3-5 輸出口編碼波形圖
二、接收部分原理
系統上電初始化后,對單片機的 P3-1 口進行檢測,當紅外線接收管輸出脈沖數 據幀時,第一位碼是低電平時,單片機將啟動中斷程序,實時的接收數據幀,同時對 第一位碼的碼寬進行驗證,如果第一位碼的低電碼寬小于 2ms 時,單片機將作為錯
誤處理,如果間隔位高電平脈寬大于 3ms,便結束接收。然后系統根據累加器中的脈 沖個數,來執行相應的程序,操作單片機的各個輸出口,來控制小燈的亮滅和顯示發 射端的按鍵值和隊可控亮度小燈進行亮度控制和亮度值顯示。遙控系統的編碼及解碼
圖 4.2
第三節 遙控發射及接收控制程序流程圖
一、 遙控發射控制流程圖
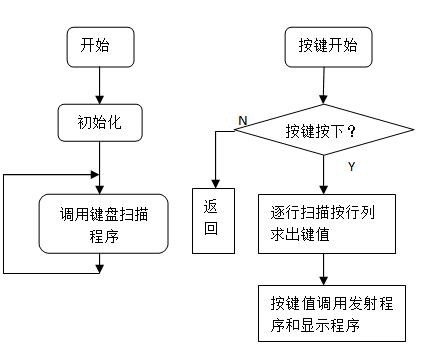
圖 4.3 遙控發射程序控制流程圖 圖 4.3,左邊是發射部分的主程序,先進行初始化,然后執行鍵盤掃描。右邊是 按鍵掃描程序,先是程序不斷掃描鍵盤是否有按鍵按下,如果有按鍵按下,便調用發 射子程序和顯示子程序。
圖 4.4 遙控發射控制流程圖 圖 4.4 是發射過程,首先按照我們自己定義的協議,裝入脈沖個數,第一個脈沖 發送的是 3ms 的脈沖,方便接收端識別,然后發1ms 脈沖,停發是 1ms 脈沖,直到 發完所有的脈沖便結束這個過程。發射程序如下:
sed()
{ ET1=1;//開計數器 1 中斷 TR1=1;//開定時器 1 delayms(3); ET1=0;TR1=0; remoteout=0; //40KHZ 發 3 毫秒
for(m=key;m>0;m--)
{ delayms(1); //停 1 毫秒
ET1=1;TR1=1; delayms(1); ET1=0;TR1=0;
remoteout=0; //40KHZ 發 1 毫秒
}
delayms(10);
}
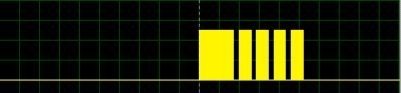
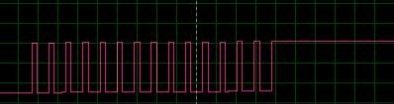
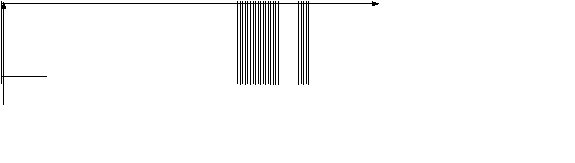
tx() 發射的脈沖用 protues 軟件波形如圖 4.5。 這是我們用 protues 進行仿真,用示波器觀察到的我們碼分編碼的脈沖波形,從 波形中我們能觀察到是按照我們要求來發射脈沖的,首先先是發射的 3ms 脈沖,然 后是發射 1ms 脈沖。
圖 4.5 遙控編碼輸出脈沖波形
二、接收部分流程圖
圖 4.6 遙控接收控制主流程圖 圖 4.6 是遙控接收端的主程序,首先還是要進行初始化,然后依據設定的顯示亮 度數據設定調光脈沖延時值。P3.0 是來自過零檢測電路提供的 50hz 過零檢測脈沖波 形。如果 P3.0 為 1 則調用延時程序,P0.7 口輸出調光脈沖。 這里設置的燈光亮度總共有 8 個檔位,分別是 0~7。在前面硬件部分已經介紹了, 控制小燈亮度是通過控制可控硅的導通角來控制的,控制可控硅的導通角又是由軟件 延時來控制觸發脈沖,達到控制可控硅的。在軟件部分就必須設置觸發脈沖的延時值, 具體的程序如下:
loop();
while(1)
{
while(sin==0); delay1ms(s); K8=0;delay1ms(1);K8=1; } 上面一段程序是在初始化后,主函數執行的程序,首先調用了 loop()子程序, loop 子程序主要功能是進行亮度顯示,和延時時間的裝載,程序如下:
loop()
{
switch(disout&0x07)
{
case 0:{s=1;break;} case 1:{s=2;break;} case 2:{s=3;break;} case 3:{s=4;break;} case 4:{s=5;break;} case 5:{s=6;break;} case 6:{s=7;break;}case 7:{s=8;break;} default:break;} } 在 loop 子程序中對不同亮度進行了延時值得設定,主程序中,當接收到過零檢 測信號為 1 時,開始執行延時程序,然后輸出調光脈沖,來控制可控硅的導通時間。 達到控制燈光亮度。
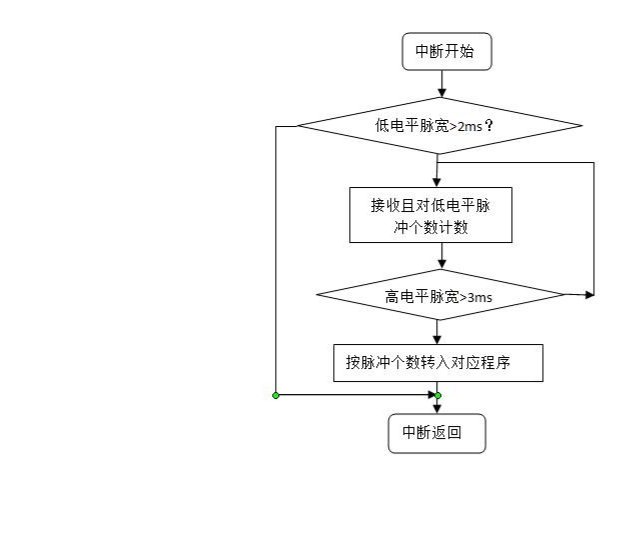 圖 4.7 遙控接收中斷流程圖
圖 4.7 是中斷過程:進入中斷后,先判斷接收到的低電平脈寬度是否大于 2ms, 若不是,直接中斷返回;若低電平大于 2ms 了,則接收并計數器對低電平脈沖進行 計數。然后判斷高電平脈沖寬度是否大于 3ms,若不是,則返回計數過程;若高電平 脈寬大于 3ms 了,則按照所得脈沖個數進入相應的功能程序。此時中斷返回。程序 編寫如下:
void intt0(void) interrupt 0
{ EX0=0;keyvol=0; if(remotein==0) {delay1ms(1);
if(remotein==0)
{while(1)
{while(remotein==0);
keyvol++;k=0;
while(remotein==1){delay1ms(1);k++;if(k>3){ xianshi();goto OOUUTT;};} 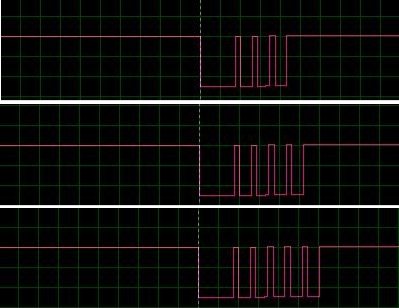 同樣我們能用示波器觀察到接收端的脈沖波形。波形如下: 同樣我們能用示波器觀察到接收端的脈沖波形。波形如下:
由圖 4.8 可以看出,接收的脈沖波形與發射的脈沖波形是相反的。由圖可知,當 高電平大于 3ms 時,我們可以判斷此時接收脈沖發射已經結束。通知單片機做相應 的處理,按脈沖個數做相應的操作。此處我們先進行等的開關控制,控制程序如下: switch(keyvol) { case 2:{K1=~K1;break;} case 3:{K2=~K2;break;} case 4:{K3=~K3;break;} case 5:{K4=~K4;break;} case 6:{K5=~K5;break;} case 7:{K6=~K6;break;} case 8:{K7=~K7;break;} case 9:{if(disout==0x00){disout=0xff;}else{disout--;}loop();break;} default:break; } } } 由程序可知,我們可以根據不同的脈沖個數來控制不同的電器開關。遙控端第一 次按下按鍵,發送脈沖,接收端接收脈沖,根據脈沖個數進行開關控制,此時開關打 開,仿真我們用 LED 顯示,此時 LED 亮,如圖 4.9。當遙控端再次按下同一個按鍵 時,接收端便關閉了電器開關,仿真中此時 LED 滅如圖 4.10。 圖 4.9 仿真中 LED 點亮圖
圖 4.10 仿真中 LED 熄滅圖
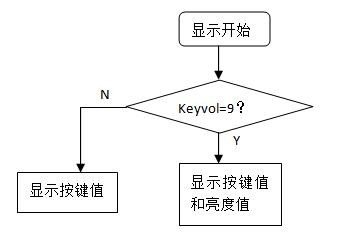
圖 4.11 顯示流程圖 本次設計中用到了兩個數碼管進行按鍵值和調光燈亮度的顯示。流程圖如圖 4.11。 當接收到的低電平脈沖值是 9 的時候,顯示按鍵值得那個數碼管繼續顯示當前的脈沖 值,另外一個數碼管對調光燈的當前亮度值進行顯示,隨按鍵按下進行改變,仿真圖 如圖 4.12 和圖4.13。如果不等于 9,數碼管顯示按鍵值,顯示亮度值得數碼管顯示當 前的亮度值,不隨按鍵改變,仿真圖如圖 4.14 和圖 4.15。
圖 4.12 顯示仿真圖
圖 4.13 顯示仿真圖
圖 4.14 顯示仿真圖
圖 4.15 顯示仿真圖
結 論
本次系統設計是基于單片機的紅外遙控家用電器,主要針對的是照明燈。首先是 對家用電器的開關進行遙控控制。其次是對家用照明燈進行燈光亮度調節。具有控制 簡單、實施方便、成本低廉、實用性強等特點。有效的解決了家用照明燈開關等麻煩, 開關控制電路多,亮度不能調節,室內裝修不美觀等問題。本單片機遙控設計方案符 合絕大多數要應用到遙控的電器系統,是自行設計遙控器的理想方案。這是本次設計 解決的問題,但是由于個人能力有限,還沒有完全實現全部的設計思路。 1、還沒有完全實現用一個遙控器來控制家庭全部的電器,包括電視機,電冰箱, 空調等各功能控制。 2、編碼方式沒有用市場遙控器所采用的串行碼編碼,而是采用更簡單的碼分編 碼方式,這種方式編碼方式簡單,可行性強,但是在實際運用中存在誤差,只適用于 遙控按鍵比較少的遙控器編碼。 3、該系統只能適用于短距離的遙控控制(10m 以內),而且紅外線不能穿透墻, 門等,故遙控范圍受到打得限制。如果是采用調頻或調幅等發射和接收編碼,可大大 提高遙控距離,并且不受角度影響。 由于本人水平有限上述這些問題還沒有得到有效解決,只有在不斷學習和探索中 再進行解決。
致 謝
歷時將近三個月畢業設計和畢業論文終于完成了,首先在此感謝我的指導老師朱 治國老師在整個畢業設計和畢業論文的完成中給予我很大的幫助。在畢業設計初期研 究方向,研究過程中遇到的各種問題,朱老師都對我提出了很多寶貴的意見,細心為 我講解遇到的各種問題。在后期論文制作中,更是嚴格把關,認真審查,給我指出了 論文中存在不足的地方,提出了很多建設性的指導意見。我能順利完成本論文和朱老 師的認真指導,辛苦批閱是離不開的。
附 錄
一、英文原文:
PacketDeliveryPerformanceofSimpleCooperative
Relaying inReal-WorldCar-to-CarCommunications
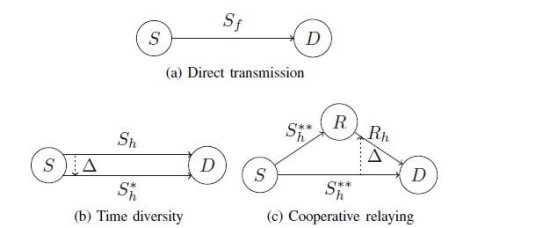
Abstract—We evaluate the packet delivery performance of low complex cooperative relaying in car-to-car communications by real-world measurements.The ratio and temporal correlation of packet delivery are evaluated for suburban and highway environments using three cars equipped with programmableradios and serving as sender, relay, and destination. We compare the relaying performance to that of pure time diversity and show how temporalautocorrelation of packet delivery is a key factor in whether or not relaying exhibits benefits. Results are relevant in the design of relay selectionprotocols, as they give guidelines for the affordable selection delay.Index Terms—Cooperative relaying, vehicular communica-tions, time diversity,measurements, testbed, VANET. I. INTRODUCTION AND MOTIVATION OOPERATIVE diversity techniques have been developedto mitigate the negative effects of small-scale fading caused by multipath propagation[1]. They apply relay nodes that overhear transmissions from a sender to a destination and forward the overheard data to the destination. Such cooperativerelaying exploits the broadcast nature of the channel and employs the concept of space-time diversity. A huge amount of research has been done in the past ten years to assess the benefits and drawbacks of cooperative relaying bysimulations and analytical mea- ns (see [2]-[5] and references therein). Given the great body of publications in this domain, it is surprising that only fewstudies assessing cooperative relaying with real world measurements in realistic environments were published so far [6]-[9]. In particular, the au- thors of thisletter are not aware of any publication investi-gating cooperative relaying in a real environment for vehicular ad hoc networks. This lack of practical results ispartly due to the fact that implementations of cooperative relaying require changes in the data link la- yer and/or physical layer of the protocol stack. Programmable hardware platforms ena- bling such implementations have been commercially available for reasonable prices for just a few years. The goal of our work is to contribute toward closing this research gap. Based on an implementation of a low-complex cooperative relaying protocol onthe programmablepl- atform WARP [10], we measure and evaluate the packetdelivery performance in an outdoor car-to-car communications scenario.Measurements are made for suburban and highway environments with three cars serving as sender, relay, and destination,
respectively. In particular, we analyze the dynamics of packet reception in terms of its temporal correlation and show the impact of these dynamics on whetheror not relaying is beneficial compared to time diversity with respect to packet delivery success. We also determine the practically important maximum relayingdelay that still leads to gains compared to time diversity. To the best of our knowledge, such experiments have not been published beforehand by otherauthors. This letter extends our preliminary work in [11]. II. RELATED WORK There are few papers on measurement-based assessment of cooperative relaying schemes. Bradford et al. [6] measure and evaluatedecode-and-forward relaying schemes in the lab. Measurements are performed with fixed distances between nodes with very low mobility and RF shields influencing radio channels. Kyritsi et al. [7] measure the performance of cooperative relaying in an indoor office scenario with twoaccess points and two devices moving on predefined paths. Valentin et al. [8] propose and implement a medium access control (MAC) protocol for mobile cooperative WLANs.Measurements are carried out in a railroad scenario, where devices move on an oval shaped railroad with low mobility.Gonzales et al. [9] compare the achievable data ratios of relaying schemes in a scenario, where indoor mobile stations communicate to anoutdoor base station. In summary, none of these papers analyzes cooperative relaying in a realistic outdoor scenario with high speed vehicles. III. EVALUATION METHODOLOGY Measurements are performed in a car-to-car communica-tions scenario, where three cars are equipped with WARPboards serving as sender S, destinationD,andrelay R,respectively. The antennas are placed on the roofs of the cars. Each board is connected via Ethernet to a notebook to collect status packets andto track the positions of the cars with GPS sensors. Wireless communications is performed using the WARP orthogonal frequency-divisionmultiplexing(OFDM) reference design (version 12). A relaying protocoland a retransmission protocol are implemented by the authors at the MAC layer.Table I shows the transmission parameters.Three scenarios for the positions of S, D, R are studied: • Relay middle (RM): R is driving between S and D. • Relay last (RL): R is driving behind S and D.
TABLE I: Transmission parameters
Parameter | Value | Frequency | 2.4GHz | Bandwidth | 10MHz | Header length | 24bytes | Payload length | 1024bytes | Modulation | OFDM with QPSK | Average TX power of packet | 14/11dBm (full / half power) | Peak transmission (TX) powe | 22.2/19.6dBm (full / half power) |
Fig. 1: Transmission cycle • Relay and destination in same car (RD): Two cars areused, one car acts as S, the other as both R and D, i.e.,one car is equipped with twoWARP boards; the distancebet- ween the antennas is 1.8 m.The cars are used in two environments: • Suburban: driving speed 50−70 km/h, medium traffic density, average distance 30m between consecutive cars. • Highway: driving speed 130 km/h, low traffic density,average distance 60 m bet- ween consecutive cars. We assess the packet delivery from S to D with help of a relay R and compare this performance to that of a single direct transmission from S to D andto that of a time dive- r sity scheme in which S sends the same packet twice to D.For a fair comparison, the single transmission scheme uses a full-powerpacket; the other two schemes employ half-power packets (see Table I). As shown in Fig. 1, the MAC layer has been programmed to subsequently transmit • a full-power packet Sf sent by S, • three half-power packets ,, sent by S, • a half-power packet sent by R. The time period between two subsequent packet transmissions is δ =30ms. A packet is delivered, if it is received by the communication partner and the cyclic redundancy checks (CRCs) of both header and payload arevalid. As shown in Fig. 2, a packet is delivered (a) by direct transmission if is delivered to D,(b) with time diversity if at least one of the half-power packetsSh or is delivered to D, and (c) using coopera- tive relaying if is delivered to D,or is delivered to R and delivered to D. No packet combining isemployed.The performance of time diversity and cooperative relaying depends on the time period between the first and the second packet of the givenscheme. This time is denoted by Δ in the following. To assess time diversity, we consider two packets and separated by Δ. For cooperative relaying, weconsider and Rh separated by Δ. Packet delivery is evaluated as a function of Δ ranging from 30ms to 30 s, which means that Δ∈ T , T := {(5i +1)δ| i=0, 1,..., 199}.Note that the time diversity scheme also benefits from spatial diversity due to movements of the cars. In each environment about 100 000 packets are transmitted.To assess the statistical significance of the measurements, we uniformly and randomly select 2 000 transmission cycles from the data set into a subset B and evaluate this set. This procedure is repeated tentimes. We show the mean of these ten values and the 10% and 90%-quantiles. IV. TEMPORAL CORRELATION OF PACKET RECEPTION The temporal correlation of packet reception of a given link is a key factor for the performance of both time diversity and cooperative relaying (whichis space-time diversity). The idea behind time diversity is that a retransmission may be successful if a first transmission failed due to changes of he channel.Informally speaking, a large positive correlation means that little changes of the channel can be expected, which in turn makes it unlikely that the secondtransmission succeeds if the first one failed. High correlation will lower the performance of time diversity. Therefore, temporal correlation can be used as an
indicator for the probability of successful transmission in time diversity and enables us to choose a suitable interval Δ between the diversity packets. We analyze the correlation of half-power packets for intervals Δ∈T .Let T := {ti | i =1,...,κ} denote the set of κ time instants of B when S sends half-power packets. We introduce the binary variable
We evaluate the sample correlation ρ( D, R,Δ) with D :=(Dt1 ,Dt2 ,...,Dtκ) and R :=(Rt1 ,Rt2 ,...,Rtκ ) as ρ( D, R,Δ)=,where R and D are thearithmetic means, sR and sD thesample variances, and T the subset of T contain -ing all time instants when S sends half-power packets Sh at times t ∈ T forwhich t ≤ tκ − Δ holds. 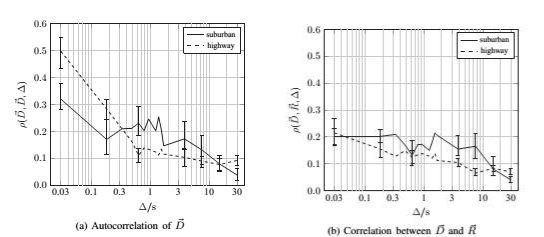 Fig. 3 shows correlations for both suburban and highway environments. The auto- correlation ρ( D, D,Δ) shown in (a) is highly positive if the time spanΔ between packets is short; it attenuates for increasing Δ. A highway exhibits a significantly higher correlation for small Δ;for Δ ≥ 0.15 s,the correlations ofhighway and suburban environments are similar. For both environments, such positive correlation will reduce the performance of time diversity.
Fig. 3: Temporal correlation. Results are for the RD case, but the correlations are similar for the RM and RL cases. Fig. 3 (b) shows the correlation between the linksS−DandS−R. The correlation between these links is small, even for very small values ofΔ. In particular,for Δ=0(not shown) the mean correlation is 0.31(suburban) and 0.21(highway),compared to1.0for the autocorrelation of half-power packets. V. END-TO-ENDPACKETDELIVERYRATI O Fig. 4 shows the percentage of packets delivered successfully from Sto Das a function of Δfor all transmissionschemes, environments, and relay positions.The delivery ratio of direct transmission is not a function ofΔ. As expected,the delivery ratio of time diversity improves for increasing Δ due to decreasingcorrelation. For all environments and relay positions the packet delivery ratios of time diversity and cooperative relaying are higher than that of directtransmission.For RM, cooperative relaying outperforms time diversity for both environments (a) and (b), mainly due to the multihop gain. For RL,cooperative relaying is worse than time diversity for the suburban environment (c) and for medium to
large Δ on the highway (d). It is better, however, for small Δon highway (Δ<0.1s). The reason for this behavior is the autocorrelation shown in Fig. 3 (a).The autocorrelation on a highway is significantly higher than for a suburban environment. Thus, cooperative relaying improves the packet delivery ratios due tothe lower correlation between the links S−DandS−R(Fig. 3 (b)). Finally, for RD, cooperative relaying excels time diversity on highways (f) forΔ<0.1s. In thesuburban environment (e), however, time diversity is better with respect to packet delivery forΔ≥30ms. This behavior can again be explained by thecorrelation. IfΔis very small, both packets of time diversity are highly correlated. In the extreme caseΔ=0, the correlation between these packets is one. Forcooperative relaying, however, the correlation between the linksS−DandR−Dis around 0.2 to 0.3. The packet delivery ratios for time diversity (Δ=0,RD)are89 %(highway) and93 %(suburban); for cooperative relaying they are96 %(highway) and95 %(suburban). Thus,for smallΔ, cooperative relayingoutperforms re-transmission in both environments in terms of packet delivery ratio. VI. CONCLUSIONS ANDFURTHERWORK Measurements conducted for vehicular communications analyzed the packet delivery performance of a simple protocol for cooperative relaying incomparison to conventional transmission schemes. Results show that cooperative relaying without diversity combining can outperform conventional schemeswith respect to packet error rate if the relay is locat- ed between sender and destination and/or the time elapsed between the two diversity packets isshort. If relaying does not benefit from a multihop gain and the delay is larger than about 150ms, pure time diversity outperforms relaying in the observedscenarios in terms of packet delivery ratio. This behavior can be explained by the temporal correlation of packet reception, which decreases for increasingdelay and thus improves packet deliv- ery for time diversity. These insights are useful for the design of relaying protocols. They indicate how fast relay selectionhas to become to yield benefits. Note that we studied reliability gains of cooperative relaying using the packet delivery ratio. Clearly, other performance metrics must be considered aswell, such as data rate and energy consumption. They have been studied theoretically, but experiments for vehicular networks are subject to future work. ACKNOWLEDGMENTS The authors thank M. Lienbacher and D. Egarter for helping with the measurements and K. Lienbacher for proofreading. REFERENCES [1] A. Sendonaris, E. Erkip, and B. Aazhang, “User cooperation diversity part I: system description,”IEEE Trans. Commun., vol. 51, pp. 1927–1938, Nov. 2003. [2] J. N. Laneman, D. N. C. Tse, and G. W. Wornell, “Cooperative diversity in wireless networks: efficient protocols and outage behavior,”IEEE Trans. Inf. Theory, vol. 50, pp. 3062–3080, Dec. 2004. [3] E. Zimmermann, P. Herhold, and G. Fettweis, “On the performance of cooperative relaying protocols in wireless networks,” Eur.Trans.Telecommun., vol. 16, pp. 5–16, 2005.
[4] A. Bletsas, A. Khisti, D. P. Reed, and A. Lippman, “A simple cooperative diversity method based on network path selection,” IEEE J. Sel.AreasCommun., vol. 24, pp. 659–672, Mar. 2006. [5] S. S. Ikki and M. H. Ahmed, “Performance analysis of cooperative diversity with incremental-best-relay technique over Rayleighfadingchannels,”IEEE Trans. Commun., vol. 59, pp. 2152–2161, Aug. 2011. [6] G. J. Bradford and J. N. Laneman,“An experimental framework for theevaluation of cooperative diversity,” inProc. 2009 Conf. on InformationSciences and Systems, pp. 641–645. [7] P. Kyritsi, P. Eggers, R. Gall, and J. M. Lourenco, “Measurement based investigation of cooperative relaying,” in Proc. 2006 IEEE VTC – Fall. [8] S. Valentin, H. S. Lichte, D. Warneke, T. Biermann, R. Funke, and[9] F.S.Gonz′ alez, B. Bandemer, G. Matz, C. Oestges, F. Kaltenberger,and N.Czink, “Performance of transmission-time optimized relaying schemes in real-world channels,” inProc. 2010 Conf. on Antennas andPropagation. [10] “WARP Project: Wireless Open-Access Research Platform, Rice University,” 2012 (accessed March 05, 2012). [11] G. Brandner, U. Schilcher, and C. Bettstetter, “Cooperative relaying in car-to-car communications: initial results from an experimental study,”inProc. 2010 IEEE Intern. Symp. Commun., Control and Sign. Proc..H. Karl, “Mobile cooperative WLANs - MAC and transceiver design,prototyping,and field measurements,” inProc. 2008 IEEE VTC – Fall.
二、英文翻譯
在真實的車對車中通訊中的簡單的協作中繼網絡傳輸性能
摘要:我們通過真實環境的測量評估了網咯傳輸特性在車對車通訊中的低復雜性。分 組交換的比率和時間相關性評估了郊區和高速公路的環境通過用三輛車配備可編程 的收音機和作為發件人,繼電器和目標。我們比較中繼器與純時間分集的性能和顯示 對于中繼展品好處分組交換的時間自相關性是否是一個關鍵因素。結果與中繼選擇協 議的設計相關,因為他們提供指引選擇延遲的實惠。 關鍵詞:協作中繼 車輛通信 時間分集 測量 試驗臺 車載自組網。
一、簡介及動機 協作分集技術已被開發為了減輕多徑衰落的由多徑傳播引起的負面影響。它們適 用于無意中偷聽到從發送者傳輸到一個目的地的中繼節點,并且轉發了偷聽到的數據 復制到目標。這種協作中繼利用廣播通道的性質和采用空間時間分集的概念。在過去 十年中通過模擬和分析手段做了大量的研究來評估合作中繼的優缺點(見[2] - [5] 和參考文獻)。鑒于在這一領域的廣大出版物,令人驚訝的是到目前為止,只有少數 研究,評估合作中繼和現實世界中的測量在現實環境中的的讀物被出版[6] - [9]。 尤其是,這封信的作者是沒有意識到任何發布的調查協作中繼對于特點工作的車輛的 真實工作環境。這種缺乏實際結果的部分原因是由于事實上,合作中繼的實現需要在 數據鏈路層和/或物理層的變化協議棧。可編程的硬件平臺,使這種方法已經用于商 業合理的價格幾年了。我們的工作目標是關閉這項研究的差距作出貢獻。基于低復雜 可編程平臺 WARP 協作中繼協議的實現[10],我們衡量和評價的分組交換在室外的車 對車通信的交付性能腳本。測量三輛車分別作為發件人,繼電器和目標,郊區和高速 公路的環境。具體而言,我們分析其時間相關的動態數據包接收和顯示這些動態的影 響與否,就分組成功傳輸相比,時間分集,中繼是有益的。我們也決定了幾乎最重要 的中繼延遲時間分集相比,仍然會導致收益。據我們所知,這些實驗在以前都還沒被 其他作者出版過。這封信延伸我們的前期工作[11]。
二、相關的工作 有幾篇基于測量的評估合作中繼方案的論文,布拉德福德等人[ 6 ]在實驗室測量 評估解碼和轉發中繼方案。之間具有固定的距離進行測量具有非常低的流動性和 RF 屏蔽影響的節點廣播頻道。 kyritsi 等。 [7]測量性能室內辦公場景有兩個協作中 繼接入點和兩個預定義的路徑移動設備。瓦倫丁等。 [8]提出并實施媒體訪問控制 (MAC)協議對于移動合作無線局域網。測量是在一個鐵路的情況下進行,在那里設
備移動到一個低流動性橢圓形的鐵路。岡薩雷斯等人。 [9 比較實現的數據在一個場 景中比較實現的數據,那里室內移動站和室外基站通信。總之,沒有論文分析在室內 具有高速車輛的協作中繼。 三、評估方法 測量是在一輛車車通信的情況下,三輛車都分別配備了 WARP 板作為發件人目 的地 D,S,和中繼節點 R,這天線放在汽車的頂部,每塊板都通過以太網連接到一 臺筆記本收集狀態數據包,并跟蹤汽車的位置通過 GPS 傳感器。無線通信使用 WARP 正交頻分復用的(OFDM)的參考設計(第 12 版)。一個中繼協議和重傳協議,作者 在 MAC 層實施。表 I 顯示了傳輸參數,三種方案 S,D,R 的位置被研究: •繼電器中間(RM):R 行駛在 S 和 D 的中間。 •繼電器昨(RL):R 行駛在 S 和 D 后面。 表 I:傳輸參數
參數 | 值 | 頻率 | 2.4GHz | 帶寬 | 10MHz | 頭長度 | 24 字節 | 載荷長度 | 1024 字節 | 調制方式 | QPSK 和 OFDM | 平均發射功率包 | 14/11 dBm 的(全/半功率) | 峰值傳輸(TX)電源 | 22.2/19.6 dBm 的(全/半功率) | 天線增益 | 7dB |
圖 1:變速箱周期。
•繼電器和目的地在同一輛車(RD):兩車,一輛汽車作為 S,另外一輛作為 R 和 D, 一輛車配備了2 WARP 板;距離天線1.8米。 •汽車在兩個環境中使用: 郊區:車速度50-70公里/小時,中等流量密度,汽車平均距離是30M。 公路:車速度130公里/小時,低流量的密度,汽車之間平均距離是60m。 我們在繼電器 R 的幫助下評估分組交換傳送從 S 到 D 的幫助下,和比較了從 S 到 D 的單方向傳送的性能和還比較了時間分集在 S 兩次發送相同的數據包到 D.為了一個 公平的比較,單傳輸方案使用全功率包,其他兩個方案采用半功率數據包(見表 I)。 如該圖所示。如圖1所示,在 MAC 層被編程后發射。 •由 S 發送的全功率包。 •由 S 發送的三個半功率包, ,。 •由 R 發送的一個半功率包.
兩個數據包傳輸之間的時間周期是δ=30毫秒。一個數據包傳送,即使收到了由通信 合作伙伴和循環冗余碼校驗(CRC)的兩個報頭和有效負載是有效的。如該圖所示。 如圖2所示,一個數據包是(a)將直接傳送交付,當 SF 被傳遞到 D,(b)在時間分 集,如果至少有一個半功率包或被傳遞到 D,以及(c)使用合作中繼,如果被傳遞 到 D 或被交付到 R 和是交付 D.無包結合。 時間分集和協作中繼的性能依賴于時間段之間的第一和第二給定的方案包。這 個時間在下面是由Δ表示。為了評估時間的多樣性,我們考慮兩種包和 被Δ分離。 對于協作中繼,我們認為秒和被Δ分離。包交付被評價為取值范圍從30毫秒到30秒的Δ函數,這表示Δ∈T,T:={(5i 的+1)δ|我= 0,1… 199}。需要注意的是由于 汽車運動的多樣性時間的多樣性計劃也有利于從空間。 在每個環境中,約100萬個數據包被傳輸。為了評估測量的統計學意義,我們 從數據集的子集 B 均勻隨機地選擇2 000個傳輸周期以及評價此集。這過程重復十次。 我們表明這些10值的10%和90%分位數的平均值。
圖 2:變速器場景。
四、接收數據包的時間相關性 一個給定的鏈路的數據包的接收的時間相關性對于兩個時間分集的性能是一 個關鍵因素和協作中繼(這是空間時間分集)。該時間分集的背后的想法是,重傳可 能成功,如果第一個發送失敗因變更信道。非正式地說,一個大的正相關性意味著可 以預期變化不大的通道,這反過來又使所述第二發送成功不太可能如果是在第一個失 敗。高相關性將降低時間分集的性能。因此, 時間相關性可以用作成功概率的指標 對于傳輸時間的多樣性和讓我們在多樣的數據包之間選擇一個適合的間隔Δ。 我們分析了相關的半功率包間隔Δ∈T。設 T={| i=1,…,κ}表示的一組 κ的時刻,當 S 半功率包發送。我們引入二進制變量。 類似地我們定義DTI。我們評估的樣本相關系數ρ( D, R,Δ)=其中R和ˉD是算術平均值, S2R和S2D為樣本方差和T? T為子集包含所有時間瞬間,當S半功率發送數據包SH 在時間t∈T?其中t≤tκ - Δ。 圖3所示為郊區和高速公路的相關性環境。自相關ρ(D,D,Δ)在圖(a) 如果Δ數據包之間的時間跨度是非常積極的是短;他增加Δ衰減。一條公路呈現出顯 著的相關性較高的對于小Δ,對于Δ≥0.15s,公路和郊區環境的相關性相似。對于 這兩種環境中,這樣的正相關減少時間分集的性能。 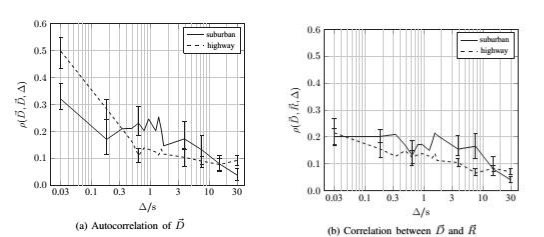 圖3:時間相關。結果為RD的情況下,但相關與RM和RL的情況下相似。 圖3(b)表示了在鏈接S-D和S - R之間的相關性,在這些鏈接之間相關性小,甚至Δ 值非常小。特別是,對于Δ=0(未示出)的平均相關性為0.31(郊區)和0.21(高速 公路),1.0對于半功率報文的自相關。
五、終端到終端的分組投遞率 圖4示出了從S到D成功傳遞的數據包的百分比作為函數Δ的所有傳輸方案,環境和 電器的位置。直接傳輸的投遞率不是函數Δ。正如預期的那樣,由于相關性下降,時 間分集的投遞率提高增加Δ。對于所有的環境和繼電器位置,時間多樣性與協作中繼 分組交換比高于直接傳輸。 對于RM中,對于這兩種環境中(a)和(b)中合作中繼的優于時間分集,主要是 由于多跳收獲。對于RL,在的郊區的的環境中(c)和中型到大型Δ在高速公路上(D)。, 合作中繼比時間分集更差。然而,這會更好,對于小的Δ中的公路上Δ<(0.1 s)。為 這種研究結原因自相關示于圖3(a)。在高速公路上的自相關名顯高于在郊區上的, 因此,合作中繼提高了分組交換的比例是由于在S - D和S - R之間的較低的的相關性 (圖3(b)),。最后,對于RD,在Δ<為0.1 s的高速公路上協作中繼優于時間分集。 然而,在郊區的環境(E),時間分集 更好地尊重分組交換當Δ≥30毫秒。這中行為可以再次由相關性來說明。 如果Δ是很小的,時間分集的兩個數據包是高度相關。在Δ= 0極端的情況下,這
些數據包之間的相關性是一個。但是,對于協作中繼在S-D和R-D之間鏈接的相關性 是0.2~0.3左右。分組交換的比率對于時間分集當(Δ= 0,RD)為89%(高速公路) 和93%(郊區);對于協作中繼他們是96%(高速公路)和95%(郊區)。因此,對于 小Δ,在這兩種環境,協作中繼的分組投遞率優于再傳。
六、結論和進一步的工作 車輛通信進行測量分析出一個簡單的協議的對于協作中集的網絡傳輸性能對照 常規傳輸方案。結果表明,沒有分集組合的協作中繼可以超越傳統的帶有尊重封包錯 誤率方案,如果繼電器位于發送方和目的地和/或所經過的時間的兩個分集的數據包 之間是短的。如果中繼沒有受益于多跳增益和延遲大于約150毫秒,在分組投遞率方 面,純時間分集優于所觀察的繼電器。這種行為可以解釋為時間相關數據包的接收, 從而降低增加延遲提高了數據包傳輸時間的多樣性。這些見解對于中繼協議的設計是 有用的。他們表示如何快速的中繼選擇已經成為發揮效益。 需要注意的是,我們使用分組投遞率研究協作中繼的可靠性收益。顯然,其他 性能衡量標準必須被考慮,如數據傳輸速率和能量消耗。它們已被從理論上研究,但 車載網絡中的實驗是今后的工作。 致謝 作者感謝M. Lienbacher D. Egarter幫助測量和K. Lienbacher幫助校對。 參考
[1] A. Sendonaris,E. Erkip,B. Aazhang,“用戶協作分集第一部分:系統介紹“, 碩士論文。通訊,第一卷。 51,第1927 - 1938年,2003年11月。 [2] JN Laneman,D.N.C.Tse,和G.W.Wornell,“協作分集無線網絡:高效的協議和 停運的行為,“理論,第一卷。 50,2004年12月,第3062-3080頁。 [3] E.齊默爾曼,P. Herhold,G. Fettweis,“無線網絡中的協作中繼協議上的表現, “。Trans.Telecommun,第一卷。 16日,第5-16頁,2005年。 [4] A. Bletsas,A. Khisti,DP里德,A.李普曼,“基于網絡的路徑選擇上的一個簡 單的合作 多樣性方法,“IEEE J. SEL。第一卷。 vol. 24, pp. 659–672, Mar. 2006. [5] G. J. Bradford and J. N. Laneman, “實驗框架合作的多樣性,“in Proc. 2009 Conf.。新聞 科學與系統,第641-645頁。 [6] P. Kyritsi, P. Eggers, R. Gall, and J. M. Lourenco,基于協作中繼調查的 測量“。 2006 IEEE VTC - 秋季。 [7] S. Valentin, H. S. Lichte, D. Warneke, T. Biermann, R. Funke, and H. Karl, “移動合作的WLAN - MAC和收發器設計原型設計,實地測量,“ 2008 IEEE VTC - 秋 季。240 IEEE無線通信信,VOL。 1,NO。 2012年6月3
三、工程設計圖紙:
四、源程序:
完整的設計資料及源程序下載地址:
http://www.zg4o1577.cn/bbs/dpj-94085-1.html
|