1. ���?z��i)��?/strong>��1���W(xu��)��(x��)�������������IJ��M늙C����ԭ����
��2���W(xu��)��(x��)�����Ն�Ƭ�C�c���M늙C�ӿ��·�B�Ӽ����Ʒ�����
��3���W(xu��)��(x��)�����ղ��M늙C���Ƴ�����O(sh��)Ӌ������
2. ����O(sh��)����1��ZY15MCU12BC2��Ƭ�C����_�l(f��)�b��һ�_��
��2��PC ϵ���C�����P(gu��n)ܛ����
3. ����(n��i)�ݼ�Ҫ����1��ͬ���һ��
��2��ͬ���һ��
��3�����M늙C����ԭ����
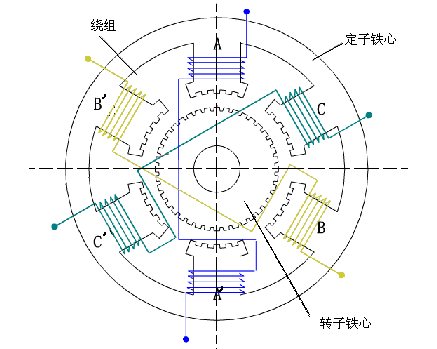
���M늙C�ǬF(xi��n)����(sh��)�ֿ��Ƽ��g(sh��)��������F(xi��n)�Ĉ�(zh��)�в����������c�ǿ��Ԍ���(sh��)���}�_��ֱ̖���D(zhu��n)�Q��һ����(sh��)ֵ�ęCе��λ�ƣ������܉��ԄӮa(ch��n)����λ�D(zhu��n)��ʹ�D(zhu��n)�S�i�������M늙C���|(zh��)����һ����(sh��)�֣��Ƕ��D(zhu��n)�Q�����D4-23��ʾ������늙C�Y(ji��)��(g��u)ʾ��D��
�D4-23 ���ಽ�M늙C�Y(ji��)��(g��u)ʾ��D
�ɈD4.22��֪���M늙C�Ķ����F������6���ȷִŘO��A��A�@��B��B�@��C��C�@�������ɂ��ŘO�g�A�Ǟ� �������A�Ǟ�
�������A�Ǟ� �������ăɂ��ŘO�M��һ�MA��A�@��B��B�@��C��C�@������ÿ���ŘO�Ͼ���ֲ���5������С�X��늙C�D(zhu��n)�ӈA����Ҳ����ķֲ���40��С�X�������X�A�Ǟ�
�������ăɂ��ŘO�M��һ�MA��A�@��B��B�@��C��C�@������ÿ���ŘO�Ͼ���ֲ���5������С�X��늙C�D(zhu��n)�ӈA����Ҳ����ķֲ���40��С�X�������X�A�Ǟ� ������늴ŌW(xu��)�����|(zh��)��֪����ij���@�Mͨ늕r������(y��ng)�Ķ��ӴŘO���a(ch��n)���ň����c�D(zhu��n)���γɴ�·����˕r���ӵ�С�X�c�D(zhu��n)�ӵ�С�X�]�Ќ��R���t�ڴň������£��D(zhu��n)�Ӿ��D(zhu��n)��һ���Ƕȣ��_���X�Č��R��
������늴ŌW(xu��)�����|(zh��)��֪����ij���@�Mͨ늕r������(y��ng)�Ķ��ӴŘO���a(ch��n)���ň����c�D(zhu��n)���γɴ�·����˕r���ӵ�С�X�c�D(zhu��n)�ӵ�С�X�]�Ќ��R���t�ڴň������£��D(zhu��n)�Ӿ��D(zhu��n)��һ���Ƕȣ��_���X�Č��R�� �ڈD4.22���������Ŀ��Ʒ�ʽ�£���(d��ng)늙CA���@�Mͨ늣�B��C�ͨ늕r���ڴň��������£��D(zhu��n)���X��A�ඨ��С�X���R���O(sh��)�ˠ�B(t��i)���ʼ��B(t��i)���������cA��ŘO���ľ����R���D(zhu��n)���X��0̖�X������B��ŘO�cA��ŘO�������֪ =
=  ����������(sh��)�����˕r�D(zhu��n)���X�cB�ඨ��С�X�����R��ֻ���D(zhu��n)�ӵ�13̖�X����B��ŘO���ľ��������
����������(sh��)�����˕r�D(zhu��n)���X�cB�ඨ��С�X�����R��ֻ���D(zhu��n)�ӵ�13̖�X����B��ŘO���ľ��������  ���X�������
���X������� ������˕rͻȻ׃?y��u)�B��ͨ늣���A��C���ͨ늣���ô��13̖�X�͕��ڴň����������D(zhu��n)���cB��ŘO���ľ����R��λ�ã������D(zhu��n)�Ӿ��D(zhu��n)�������X�����D(zhu��n)���@���D(zhu��n)�ӽǶȷQ�鲽���
������˕rͻȻ׃?y��u)�B��ͨ늣���A��C���ͨ늣���ô��13̖�X�͕��ڴň����������D(zhu��n)���cB��ŘO���ľ����R��λ�ã������D(zhu��n)�Ӿ��D(zhu��n)�������X�����D(zhu��n)���@���D(zhu��n)�ӽǶȷQ�鲽��� ���@���dz��f�IJ��M늙C������һ�������@�ӣ�����A��B��C��A���ͨ�1�Σ�����ʹ�D(zhu��n)���D(zhu��n)����
���@���dz��f�IJ��M늙C������һ�������@�ӣ�����A��B��C��A���ͨ�1�Σ�����ʹ�D(zhu��n)���D(zhu��n)���� �ɴ˵õ����M늙C�IJ����Ӌ�㹫ʽ���£� ʽ�У� ���D(zhu��n)���X��(sh��)��
���D(zhu��n)���X��(sh��)�� ���\���Ĕ�(sh��)������
���\���Ĕ�(sh��)������ ������@�M����(sh��)��
������@�M����(sh��)�� ���B(t��i)ϵ��(sh��)�������Ļ��p���ĕr
���B(t��i)ϵ��(sh��)�������Ļ��p���ĕr �������Ļ��p���ĕr
�������Ļ��p���ĕr ��
�� ͬ����������A��C��B��A���������ͨ늣����M늙C�t���෴�����D(zhu��n)���� ��4�����M늙C����ԭ����
��ǰ����֪�����M늙C���ǿ����ƶ����@�M݆��ͨ늶��D(zhu��n)�ӵģ��(q��)���@�M��늉���ֱ��12V����(d��ng)���M�(q��)�������յ�һ���}�_��̖�������(q��)�Ӳ��M늙C���շ��������̖��ָʾ�ķ����D(zhu��n)��һ���̶��ĽǶȣ���������������M늙C���ߡ���1�������ԣ��ɳ�ʼλ�ã�ֻҪ֪������������^�IJ���(sh��)�����ܵõ�늙C��K��λ�á���ˣ�����ͨ�^���Ʋ��M�(q��)����ݔ���}�_��(sh��)�����Ʋ��M늙C��λ�������Ķ��_����(zh��n)�_��λ��Ŀ�ģ�ͬ�r߀����ͨ�^���Ʋ��M�(q��)����ݔ���}�_�l�ʁ�����늙C���ٶȺͼ��ٶȣ��Ķ��_���{(di��o)�ٵ�Ŀ�ġ� �C���������M늙C�����@�Mͨ��}�_���l�ʺ����@�Mͨ�����ǿ��Ʋ��M늙C�D(zhu��n)�ٺ��D(zhu��n)�ӷ�����P(gu��n)�I���g(sh��)��
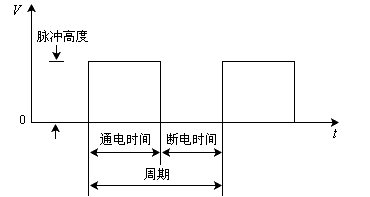
���M늙CҪ�����M�����͵îa(ch��n)����D4.23��ʾ���}�_��̖���D4-24���}�_�����������ڡ��}�_�߶Ⱥ�ͨ���r�g�������ġ��ڔ�(sh��)���·�У��}�_�߶���Ԫ���ƽ?j��ng)Q������TTL�ƽ��0V��5V��COMS�ƽ��0V��10V�����M늙Cÿһ����푑�(y��ng)������Ҫһ���ĕr�g����һ�����}�_Ҫ����һ���ĕr�g���Ա�늙C��ȫ�_��һ����λ�á����M늙C�D(zhu��n)�ӽǶȴ�С�cʩ�����@�M�ϵ��}�_�����ȡ�ͨ��ĕr�g���������ӕr��ܛ���Ќ��F(xi��n)���}�_�����l�ʛQ���˲��M늙C�Č��H�������ʣ��D(zhu��n)�٣�����ͨ�^��ͬ�L�ȵ��ӕr���õ���ͬ�l�ʵIJ��M늙Cݔ���}�_���Ķ���׃���M늙C���D(zhu��n)�١�
�D4-24 �}�_������̖ʾ��D
���M늙C�D(zhu��n)�ӷ����cݔ���}�_��������P(gu��n)��늙C���D(zhu��n)�ټ�ȡ�Q�ڿ����@�M��ͨ��l�ʣ���ȡ�Q���@�M��ͨ늷�ʽ����4-4�o�����ಽ�M늙C���D(zhu��n)�ӷ����c�����@�Mͨ�����ͨ늷�ʽ�Č���(y��ng)�P(gu��n)ϵ���������ࡢ���ࡢ���ಽ�M늙C�������ƶ��á�
��4-4 ���ಽ�M늙C�D(zhu��n)�ӌ���(y��ng)�P(gu��n)ϵ��
| | |
������ �p���� �������� ������ �p���� �������� | A��B��C��A AB��BC��CA��AB A��AB��B��BC��C��CA��A A��C��B��A AB��CA��BC��AB A��CA��C��BC��B��AB��A | ���D(zhu��n) ���D(zhu��n) ���D(zhu��n) ���D(zhu��n) ���D(zhu��n) ���D(zhu��n) |
��5����Ƭ�C���Ʋ��M늙C�������ӿ��·��
���M늙C�����@�Mͨ��}�_���l�ʺ����@�Mͨ�����ǿ��Ʋ��M늙C�D(zhu��n)�ٺ��D(zhu��n)�ӷ�����P(gu��n)�I���g(sh��)���Ɇ�Ƭ�CI/O���_ݔ���}�_��̖����̖���ڿɲ���ܛ���ӕr�r�����r���F(xi��n)�������@�Mͨ�����������̖��ͨ�^��������ֿ��ƌ���(y��ng)��I/O���_ݔ�����F(xi��n)��
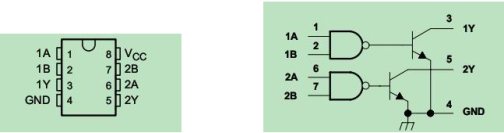
���چ�Ƭ�C��ݔ��늉��dz�����0V��5V��������ֱ���(q��)�Ӳ��M늙C���Ć�Ƭ�Cݔ����늉���̖��횽�(j��ng)�^�Ŵ��·�Ŵ��ſ����(q��)�Ӳ��M늙C��ZY15MCU12BC2���ƽ�_���M늙C�(q��)������2Ƭ�(q��)��оƬ75452���F(xi��n)��75452���p��������(q��)��оƬ�������_�̓�(n��i)��߉�D��D4-25��a������b����ʾ��
75452��(n��i)���Ƀɂ��c���T�����O�ܷŴ��·��(g��u)�ɣ��D��a����1A��1B��2A��2B�քe�ǃ�(n��i)���ɂ��c���T��ݔ�����_�������ⲿ��(sh��)���}�_��̖��ݔ����̖��(j��ng)��(n��i)�����O�ܷŴ��ͨ�^���_1Y��2Yݔ����
��a�� 75452 ���_�D (b) 75452 ��(n��i)��߉�D
�D4-25 75452 ���_��߉�D
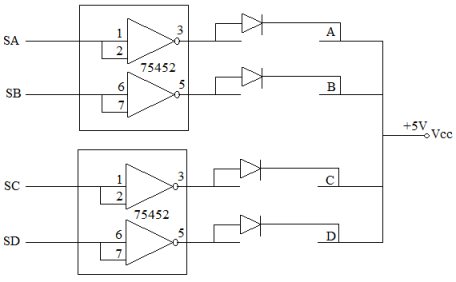
ZY15MCU12BC2���ƽ�_���M늙C�(q��)���������������(q��)�ӣ����ಽ�M늙C�(q��)�����ӿ��·��D 4-26��ʾ��
�D4-26 ���ƽ�_���ಽ�M늙C�(q��)�����ӿ��·�D
�D��SA��SB��SC��SD�քe��2Ƭ75452��ݔ����̖����Ƭ�CP1.0 �� P1.3��SA��SD����P1�ڰ������������ݔ�����ƴa�(q��)�Ӳ��M늙C�\�D(zhu��n)�����M늙C�IJ���� ����늄әC�D(zhu��n)��1�ܞ�100����
����늄әC�D(zhu��n)��1�ܞ�100���� �(q��)���·���}�_��̖�����ƣ�늙C�D(zhu��n)�ӷ����c��Ȧͨ�������P(gu��n)������(j��)�������Ŀ��Ʒ��������M늙C���D(zhu��n)�ͷ��D(zhu��n)�rSA��SB��SC��SDͨ�������£�
���M늙C���D(zhu��n): 
���M늙C���D(zhu��n): 
����Ȧͨ�����cP1.0 �� P1.3�}�_���䷽ʽ�a(ch��n)���Ą��߉���4-5��ʾ��
��4-5 ���������IJ��M늙C�D(zhu��n)�ӄ��߉��
| ���������� P1.3 P1.2 P1.1 P1.0 | | | |
| 0 0 0 1 0 0 1 0 0 1 0 0 1 0 0 0 | | | |
| 0 0 0 1 1 0 0 0 0 1 0 0 0 0 1 0 | | | |
��6�����ӿ��·�B�ӡ�
��Ƭ�CP1.0 �� P1.3��SA��SB��SC��SD��ָʾ��L0��L1��L2��L3�ˣ���(d��ng)P1.i��i = 0 �� 3���顰1���r����(y��ng)��Ȧͨ늣��˕rָʾ����(y��ng)Ϩ�硣��ע�⣺�����ˌ��r�����M늙C��(y��ng)�P(gu��n)�]��ʹ�ò��M늙C�ք��_�P(gu��n)���F(xi��n)����
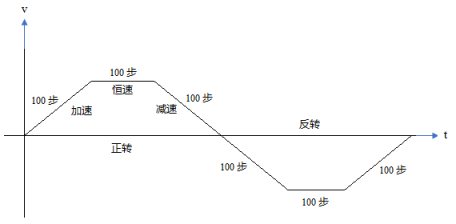
�������{(di��o)ԇ���M늙C�����(q��)���ӳ������(q��)���ӳ����������ʹ���M늙C���D 4-27��ʾѭ�h(hu��n)������
�D4-27 ���M늙C�D(zhu��n)��׃���D
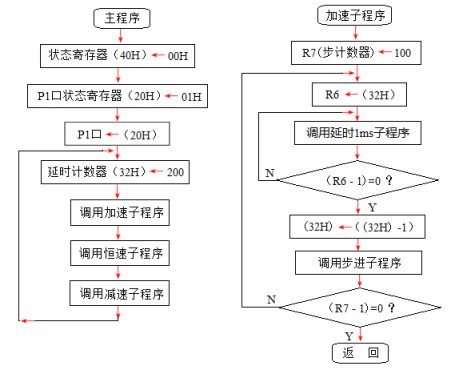
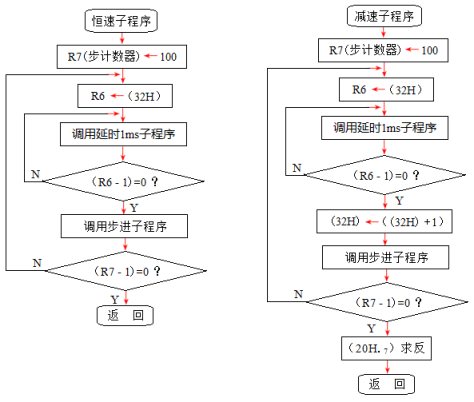
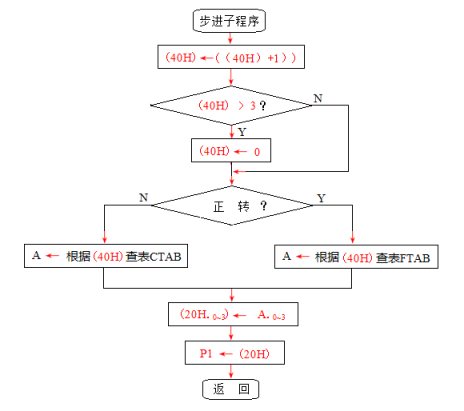
��7��������������������ӳ������ӳ��p���ӳ���Ͳ��M�ӳ��������̈D��D4-28��ʾ��
����40H��Ԫ��Ų��M늙C��B(t��i)ֵ��0��3�քe����(y��ng)�(q��)����SA��SB��SC��SD�˿ڡ�
20H��Ԫ���P1��B(t��i)ֵ��P1.0��P1.3�鲽�M늙Cͨ늿����֣�P1.7��ָʾ��L7�ˣ�ָʾ늙C���D(zhu��n)�����D(zhu��n)��L7������늙C���D(zhu��n)��L7���磬늙C���D(zhu��n)��
���M늙C���D(zhu��n)��B(t��i)����FTAB: 01H��02H��04H��08H��
���M늙C���D(zhu��n)��B(t��i)����CTAB: 01H��08H��04H��02H��
�D4-28 ���M늙C�������ӳ������̈D
��8���������ԣ���ZY12232.ASM��
��9���ڦ�Vision3�_�l(f��)ƽ�_��ݔ������g���B�ӳ���
��10���{(di��o)ԇ���\�г���
�� ����·�B��Ҋ���D4-8���M늙C����·�D����
�� ��01H��02H��04H��08H��01H��02H��04H��08H ��������P1�ڣ��^�첽�M늙C�D(zhu��n)���Ƿ�������ָʾ��L3 ~ L0�Ġ�B(t��i)�c����P1�ڵ�ֵ�к��P(gu��n)ϵ��
�� �O(sh��)�ó�ֵ��P1�ڡ�01H��(20H)��01H��(40H)��0���^�첽�M늙C�Ƿ�����D(zhu��n)�F(xi��n)��P1�ڡ�81H��(20H)��81H��(40H)��0���^�첽�M늙C�Ƿ�鷴�D(zhu��n)�F(xi��n)��
�� �ģ�32H����Ԫ��ֵ���yԇ���M늙C�܉��_��������D(zhu��n)�١�
��11�����Y(ji��)��������Ӿ�����һ�������(f��)ԭ��
4. ����A(y��)��(x��)Ҫ����1���J����x�����⌍�ָ��(d��o)�����I(l��ng)�����Ό��?z��i)���Ҫ���c����(n��i)�ݡ�
��2���м���x���M늙C����ԭ������Ƭ�C���Ʒ��������ƽ�_�ӿ��·�ȃ�(n��i)�ݡ�
��3���м���x���M늙C������
5. �����Ҫ����1����������ӛ䛲�������(sh��)��(j��)��
��2���������D�����������
��3���������Y(ji��)��������w���������ĸ��M��Ҋ��
word��ʽ���x�}�Y�����d��ַ��
http://www.zg4o1577.cn/bbs/dpj-93744-1.html





 ����TQQ:125739409;���g(sh��)����QQȺ281945664
����TQQ:125739409;���g(sh��)����QQȺ281945664





 QQ���Ѻ�Ⱥ
QQ���Ѻ�Ⱥ QQ���g
QQ���g �vӍ��
�vӍ�� �vӍ����
�vӍ���� �ղ�
�ղ� ����
���� �
� ��
��