|
ժ Ҫ ��ϵ�y(t��ng)���Æ�Ƭ�C(j��)C8051F005�������������С��܇�����Ԅӿ��ơ������^�������÷�����늂������R�e·��ھ���Ϣ�����CС܇�܉���Ч�Č��E��ֹͣ�����ýǶȂ������y���¶ȣ�ͨ�^��(sh��)��(j��)�ɼ�ϵ�y(t��ng)��̎�������늄�С��܇���E�E��̎���κνǶȕr���ٶȼ�������ơ�����PWM ���}���{(di��o)�ƣ����g(sh��)����ֱ��늙C(j��)���D(zhu��n)�٣��r�g�Ô�(sh��)�a���@ʾ�����O(sh��)Ӌ(j��)��ʹ����֧������늂�����������������֧����܇݆���D(zhu��n)��һ֧����ǰ�M(j��n)��ֹͣ������ϵ�y(t��ng)�^�õČ�(sh��)�F(xi��n)���}Ŀ��Ҫ���_(d��)�����^�ߵ�����ָ��(bi��o)��
һ�� ������Փ�C�c�x��
����(j��)�}Ŀ�Ļ���Ҫ�քe��ϵ�y(t��ng)��ģ�K�M(j��n)��Փ�C�� 1�� ��Ƭ�C(j��)���x�� ����һ�� ���Â��y(t��ng)��89C51оƬ����С܇�Ŀ������ġ�51��Ƭ�C(j��)���Ѓr(ji��)�����ʹ�ú��ε����c(di��n)�������\(y��n)���ٶ��^�͡����ܱ��^��һ����(n��i)���YԴ���^�٣��ڌ�С܇�M(j��n)�п��ƕr�����U(ku��)оƬ�� �ұ�ϵ�y(t��ng)��ҪA/D��D/A�D(zhu��n)�Qģ�K��89C51�Л]�У���Ҫ��ӣ������^���������^������ �������� ���Æ�Ƭ�C(j��)C8051F005����������ġ�C8051Fϵ�І�Ƭ�C(j��)��ָ��ϵ�y(t��ng)�c���y(t��ng)��80C51��Ƭ�C(j��)��ȫ���ݣ��҆�Ƭ�C(j��)C8051F005�����S���ă�(n��i)���YԴ�����Ұ���12λ���ȵ�A/D��D/A�D(zhu��n)�Qģ�K��������ģ�M����(sh��)����̖���D(zhu��n)�Q������Ҫ�����A/D��D/A�D(zhu��n)�Qģ�K���������ڲ�����ˮ�����g(sh��)���Ș�(bi��o)��(zh��n)51ϵ�І�Ƭ�C(j��)��s12��������֮��C8051Fϵ�І�Ƭ�C(j��)߀���в������Σ��ھ����d�����{(di��o)ԇ�ȃ�(y��u)�c(di��n)����ȫ�m���ڌ�С܇�Ŀ��ơ�������������S�����Д�Դ����Ղ���������Ϣ�ṩ�˺ܴ�ķ��㡣 �������������������x������ 2�� 늄әC(j��)�(q��)���{(di��o)��ģ�K���x�� ����һ�� ���ò��M(j��n)늙C(j��)�����(q��)��Դ���˷N���������p�ɵ��_(d��)���{(di��o)�ٵ�Ŀ�ģ�������ԭ�е�С܇�Y(ji��)��(g��u)���ҵ����m�IJ��M(j��n)늙C(j��)���^���y��ͬ�rҲ�Ӵ���ϵ�y(t��ng)�ď�(f��)�s�̶ȣ��������Ӳ����������y�̶ȣ����Ҳ��M(j��n)늙C(j��)�ăr(ji��)��Ҳ���^�ߡ� �������� �������_(d��)���D�ܽM�ɵ�H��PWM�·��PWM�·���Ă����ʾ��w�ܽM��H���·��(g��u)�ɣ��Ă����w�ܷ֞�ɽM�����挧(d��o)ͨ�ͽ�ֹ���Æ�Ƭ�C(j��)�����_(d��)���D��ʹ֮�������_�P(gu��n)��B(t��i)��ͨ�^�{(di��o)��ݔ������}�_��ռ�ձȣ����_�{(di��o)��늄әC(j��)�D(zhu��n)�١��@�N�·���ڹ���ֻ������ͺͽ�ֹ?f��n)�B(t��i)�£�Ч�ʷdz��ߡ�H���·ʹ��(sh��)�F(xi��n)�D(zhu��n)�ٺͷ���Ŀ��ƺ�����������_�P(gu��n)���ٶȺܿ죬��(w��n)���ԘO��(qi��ng)����һ�N�V�����õ�PWM�{(di��o)�ټ��g(sh��)�� ���������������M���÷������� 3�� ·��ھ�̽�yģ�K���x�� ̽�y·��ھ��Ĺ���ԭ���ǣ��⾀���䵽·�沢���䣬���ںھ��Ͱ��ķ���ϵ��(sh��)��ͬ���ɸ���(j��)���յ��ķ���⏊(qi��ng)���Д��Ƿ��_(d��)�ھ� ����һ�� ���{(di��o)�Ƶķ���ʽ�t��l(f��)�䡪�����������ڲ��üt��ܴ�����ͨ��Ҋ��ܣ����Խ��ͭh(hu��n)���ɔ_�������ֱ����ֱ��늉��������M(j��n)�й�늣����ڹ��ӵ�ƽ������Ҫ�������ֻ����10mA���ң���Ȼ�����ܵ��ɔ_�� �������� ����늹��_�P(gu��n)��E3F-DS0C4������늹��_�P(gu��n)Ĭ�J(r��n)����ƽ����(d��ng)�z�y���ھ��r��ݔ�����ƽ�o��Ƭ�C(j��)���Ķ��a(ch��n)���Дࡣ���·�����ڽ���ݔ���迹��Ӳ���·��������ܛ�����ƣ�߀������Ч����늙z�y�Y(ji��)�������Ƭ�C(j��)̎���� �����������]���M���÷������� 4�� �@ʾ�x�� ����һ�������o�B(t��i)�(q��)�ӷ���ݔ��һ���@ʾ��(sh��)��(j��)�����Д�(sh��)�a�ܿ���һֱ�����@ʾ��ֻ��Ҫ��׃�@ʾ��(n��i)�ݕr�����°l(f��)��һ���@ʾ��(sh��)��(j��)������(sh��)�r�Բ���˲��á� �����������ÄӑB(t��i)�(q��)�ӷ�ԭ����ÿֻ��(sh��)�a��݆���@ʾ���Ե��ַ����������۾���ҕ�X�������ԣ���(d��ng)ÿֻ��(sh��)�a���@ʾ�ĕr�g�g��С��1/16S�r���۸��X�����W�q����������ÿֻ��(sh��)�a�ܳ����� ���σɷN�����C�Ͽ��]�����÷������� 5�� �Դ���x�� ����һ���p�Դ��늡��Ãɂ��Դ�քe�o����ϵ�y(t��ng)��늙C(j��)ϵ�y(t��ng)��늌��ɂ�ϵ�y(t��ng)��ȫ���x�����ù����ς�ݔ��̖���@�����mȻ���Ԍ�늄әC(j��)�(q��)������ɵĸɔ_��͵�������(f��)�s������Դ�����`� �����������Æ�һ�Դ��6��(ji��)AA늳أ���늷��������چ�Ƭ�C(j��)�c늙C(j��)�(q��)���·�g�����˹��������M(j��n)���B�ӣ��@�Ӽ��ܺ����·��������Դ�Ŀɿ��ԣ��Ķ����ϵ�y(t��ng)�ķ�(w��n)���ԡ� ���������������M���÷�������
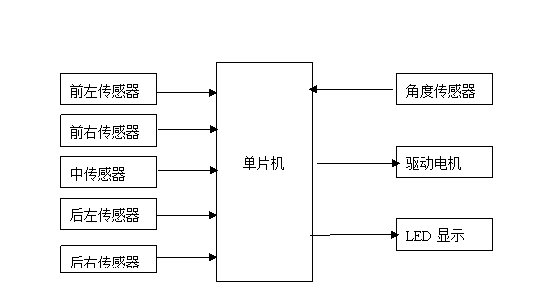
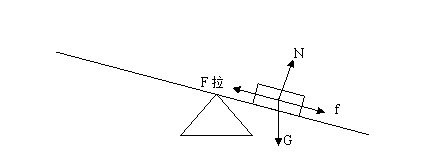
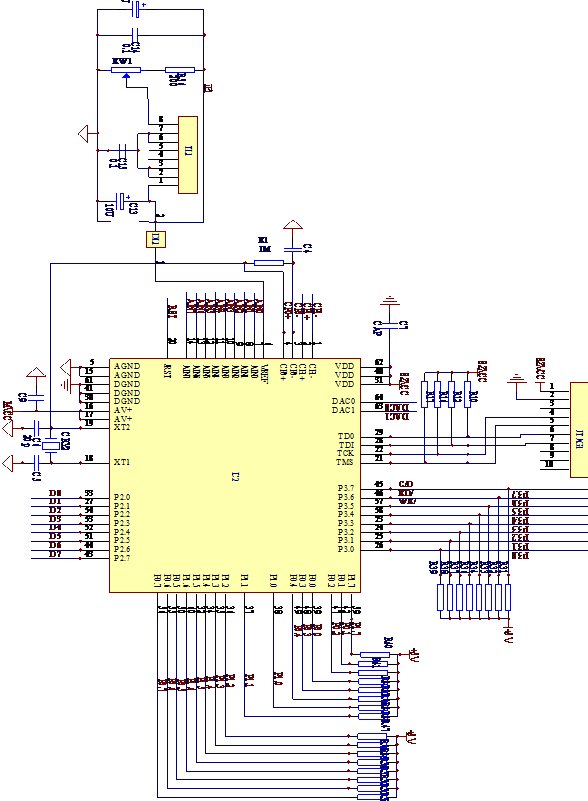
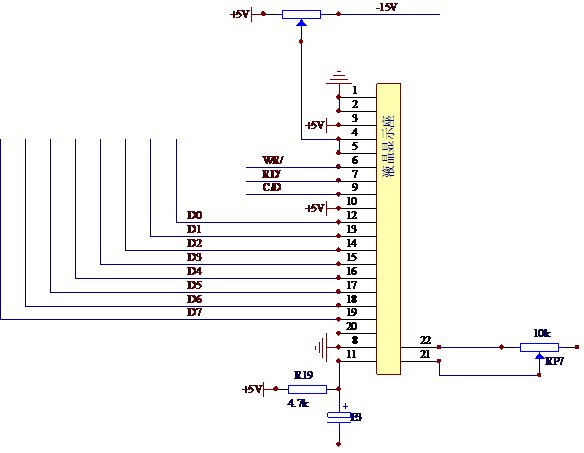
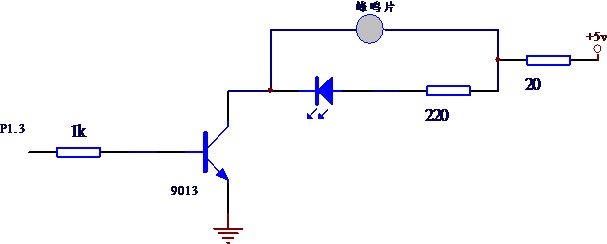
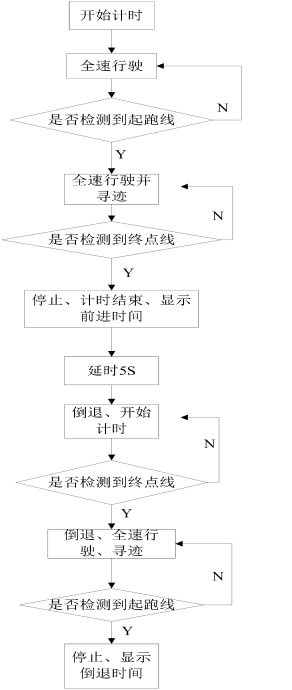
����ϵ�y(t��ng)��D������ԭ�� �D2-1�o����ϵ�y(t��ng)�M�ɿ�D����(sh��)��(j��)�ɼ�ͨ�^������늂�������Ɍ��ھ��ęz�y���������̖�}�_����ʽ�����Ƭ�C(j��)���Д�Դ����֧������늂��������D�����������քe�c��Ƭ�C(j��)��P1.6��P1.7��P0.2��P1.5��P1.4��ӣ���Ƭ�C(j��)���́�����̖�M(j��n)�з�����̎�����ǶȂ��������ɼ�����Ϣͨ�^A/Dģ�K�M(j��n)�вɼ�����(j��ng)̎����l(f��)��ָ�С܇��(sh��)ʩ���ƣ�ʹ늄�܇��������ٶȵ����{(di��o)�������⣬��Ƭ�C(j��)ͨ�^��(n��i)���r犌����r�g�M(j��n)��ӛ䛲��@ʾ�� �D1 ϵ�y(t��ng)�M�ɿ�D ����ϵ�y(t��ng)��Ӳ���O(sh��)Ӌ(j��) 1��늙C(j��)�(q��)���·ģ�K 늄әC(j��)PWM�(q��)��ģ�K���·Ҋ���D2�����·���õ��ǻ���PWM ԭ����H���(q��)���·��ԓ�·����TIP122��TIP127�����_(d��)���D�ܣ��Ա��C늄әC(j��)����˲�g�����Ҫ�� �·�����^�̣���(d��ng)40106��1�_����ƽ��5�_����ƽ�r��Q1��Q4�ܽ�ֹ��늄әC(j��)���D(zhu��n)����(d��ng)40106��1�_����ƽ��5�_����ƽ�r��Q2��Q3�ܽ�ֹ��Q1��Q4�܌�(d��o)ͨ��늄әC(j��)���D(zhu��n)�� ����ϵ�y(t��ng)늉��y(t��ng)һ��5V�Դ��������_(d��)���D�ܻ��O�ɿ���ϵ�y(t��ng)ֱ�ӿ��ƣ��t����늉���ߞ�5V���ټ������O�ܱ����ĉ������ӵ�늄әC(j��)�ɶ˵�늉���ֻ��4V���ң��p����늄әC(j��)���(q��)�����������������]���҂��\(y��n)����4N25����ɉK�������Ʋ����c늄әC(j��)���(q��)�Ӳ��ָ��x�_�����@�Ӳ��H�����˸�ϵ�y(t��ng)ģ�K֮�g�ĸ��x�ȣ�Ҳʹ�(q��)������õ��˴�������(qi��ng)�� ����40106��1�_�c5�_�@������늉����҂�������200KHz��������̖���ƣ�ͨ�^����ռ�ձȵ��{(di��o)������܇���M(j��n)���{(di��o)������С�}�_��0.2ms�����ԝM��܇���{(di��o)���ľ���Ҫ��ͬ�r������ͨ�^40106��1�_�c5�_���ГQ������늄әC(j��)�����D(zhu��n)�c���D(zhu��n)�� 2��������ģ�K 2.1 ������늂����� ��늂��������ܵ���Ҋ������a(ch��n)�����Ч��(y��ng)��������̖�D(zhu��n)�Q�����̖ݔ���������ܜy���⏊(qi��ng)֮�⣬߀�����ù⾀���䡢�ړ������䡢����Ȝy����N����������ߴ硢λ�ơ��ٶȡ��ضȵȣ������һ�N��(y��ng)�ØO�V������Ҫ������������ϵ�y(t��ng)�����˷�����늂����������ú�ɫ���E�����ⷴ�������ʹ������ݔ�����ƽ���o��Ƭ�C(j��)����Ƭ�C(j��)ݔ������(y��ng)��ָ��Ķ�����С܇���D(zhu��n)���O(sh��)Ӌ(j��)��ʹ����֧������늂�������ǰ��ǰ�҂��������b�ڃ�ǰ݆���gλ�ò��քe�c��Ƭ�C(j��)P1.6��P1.7����ӣ�����С܇ǰ݆���D(zhu��n)�����҂��������b�ڃɺ�݆���룬�cP1.5��P1.4�����B������С܇��ǰ�M(j��n)�����ˣ��Ђ��������b��܇�w���gһ��(c��)λ�ò��c��Ƭ�C(j��)P2.0���B�ӣ����ڙz�y�M��ھ�������С܇����ֹͣ����(d��ng)�������z�y����̖���o��Ƭ�C(j��)�a(ch��n)���Д࣬���l(f��)������(y��ng)ָ���{(di��o)�١����CС܇�܉���Ч�Č��E��ֹͣ�� 2.2 �ǶȂ����� �ǶȂ�������(j��ng)������ϵ�y(t��ng)��ˮƽ�y�����Ĺ���ԭ���Ͽɷ֞顰���w�[��ʽ����Һ�w�[��ʽ�������w�[�����N�A�ǂ���������ϵ�y(t��ng)���õ��ǹ��w�[ʽ�ǶȂ�����AME-B001����ݔ����ģ�M�����D(zhu��n)�Ƿ�����0��360�ȣ�ݔ��늉�������0.5��4.5V ��ƽ��λ��늉��s��1.7V���˂��������д��λ��δ����(zh��n)�Ԅ��a(b��)�������ϙz�y���ܣ��ǽ��|λ�Ùz�y���ܣ��ǝM����̭h(hu��n)����(y��ng)������������x��������(y��u)�c(di��n)������(j��)�¶ȵIJ�ͬ����Ƭ�C(j��)ͨ�^A/Dģ�K�ɼ�����ͬ��늉����ٸ���(j��)늉�ֵ�IJ�ͬ����С܇�����µ��ٶȣ��Ķ���ֹС܇���r��?y��n)��ٶ�С���������ϼ����r��?y��n)��ٶ��^����_���E�E�壬���C��С܇�������r��������С܇���E�E�������������G��֧����N��늙C(j��)������F�����c�����෴��Ħ����f���E�E���c����A�Ǟ�ȡ�������r�������D��ʾ�� �D2 С܇�������� ��ʹС܇���E�E���ϱ��ք������t��(y��ng)����ƽ�⣬��ˮƽ����(y��ng)�M�㣺 ��(j��ng)����������֪��f=Ug�� N=Gcos��.��(j��ng)�Ƶ��ɵó������c�ȵ��P(gu��n)ϵ�飺 ����(j��)�����c늙C(j��)Ť�����P(gu��n)ϵ��F��= X%*FŤ���ɵó��A�Ǧ��c늙C(j��)Ť�����P(gu��n)ϵ��  . .3���@ʾ�·ģ�K �ӑB(t��i)�(q��)�ӷ�����(sh��)�a�ܵĹP�����c�����˶������(q��)���·������(sh��)�a�ܵĹP�����B����һ���(q��)���·���@ʾ���δa���δa��ͬ�r����ÿֻ��(sh��)�a���ϡ�������(sh��)�a�ܵĹ����˷քeʹ���(q��)�������(q��)�ӡ�����һ���r��ֻ��һֻ��(sh��)�a�ܵĹ����˱��(q��)�ӣ�λ�a������ֻ��ԓ��(sh��)�a�����@ʾ��������(sh��)�a�����ڹ�����δ���(q��)�ӣ���ʹ�P���˼��жδa�(q��)��Ҳ�����@ʾ��λ�(q��)���·��ͣ��݆���(q��)��ÿһֻ��(sh��)�a�ܣ����(q��)��ͬ�rݔ�����(q��)�ӵĔ�(sh��)�a�ܵĶδa���@��ÿֻ��(sh��)�a��݆���@ʾ���Ե��ַ����������۾���ҕ�X�������ԣ���(d��ng)ÿֻ��(sh��)�a���@ʾ�ĕr�g�g��С��1/16S�r���۸��X�����W�ӣ���������ÿֻ��(sh��)�a�ܳ������·ԭ��DҊ���D3 ��ʾ�� 4���Դ�·ģ�K ���O(sh��)Ӌ(j��)���Æ��Դ��늣����w�·Ҋ���D4��ʾ�� �ġ�ϵ�y(t��ng)��ܛ���O(sh��)Ӌ(j��) ���Ãɸ�����ͨ�^�����ГQ,��(sh��)�F(xi��n)�}ĿҪ��Ĺ��ܡ� ���ڻ���Ҫ�ֵČ�(sh��)�F(xi��n)���ܻ������ƣ�ֻ���E�E��Ġ�B(t��i)��ͬ���ʻ������ֲ���һ�����̈D��Ҋ���D6�� �Ȍ��E�E��̶���ˮƽ��B(t��i)��늄�܇����ʼ��Aλ�ó��l(f��)������E�E���ȫ�̣�ȫ�̵ĺ��x��늄�܇����ʼ��A���l(f��)��܇�^���_(d��)�E�E��픶�Bλ�ã���ֹͣ5���늄�܇�ُ��E�E���B�˵��˻����E�E�����ʼ��A��늄�܇�ܷքe�@ʾǰ�M(j��n)�͵������õĕr�g��ǰ�M(j��n)�����1��犃�(n��i)�����������1.5��犃�(n��i)��ɡ� �E�E��̎�ڈD1��ʾ�Ġ�B(t��i)�£��������wλ�ò����ƣ���늄�܇����ʼ��A���l(f��)������E�E���ȫ�̡�ֹͣ5���늄�܇�ُ��E�E���B�˵��˻����E�E�����ʼ��A��늄�܇�ܷքe�@ʾǰ�M(j��n)�͵������õĕr�g��ǰ�M(j��n)�����1.5��犃�(n��i)�����������2��犃�(n��i)��ɡ����̈DҊ���D6�� �l(f��)�]���ֺͻ��A(ch��)���ֵ���r��ͬ�������Բ���һ�����̈D��Ҋ���D7�� �Ʌ�ِ�(du��)�T���������w�O(sh��)���ڿ��Ƅӷ����е�ijλ�ã�늄�܇����ʼ��A���l(f��)����(d��ng)�E�E���_(d��)��ƽ��r�����֕r�g��С��5�룬ͬ�r�l(f��)������ʾ��늄�܇�@ʾ���õĕr�g��ȫ�^��Ҫ����2��犃�(n��i)��ɡ� ��Ҫ���܉���ɵĺÉ���Ҫ��ه�ڡ�1���A(y��)�Ȝy�L�ľ��ȣ���2��ֹͣλ�õĜ�(zh��n)�_�ȡ� �ڿ��Ƅӷ�����(n��i)�����O(sh��)���������w��λ�ã��ɜyԇ�ˆTָ������늄�܇����ʼ��A���l(f��)����(d��ng)�E�E���_(d��)��ƽ��r�����֕r�g��С��5�룬ͬ�r�l(f��)������ʾ��늄�܇�@ʾ���õĕr�g��ȫ�^��Ҫ����2��犃�(n��i)��ɡ����̈DҊ���D7�� �塢��(sh��)�H�yԇ 1. �y���O(sh��)�� ģ�M�ܵ����E�E�壩�����L160mm��A��B���c(di��n)���E�E�������D(zhu��n)�S���L80mm ���ߣ�����mm ����������� 2. �r�g�yԇ ������Ҏ(gu��)���r�g��(n��i)����΄�(w��)��
���� �Y(ji��)Փ 1. ��(sh��)�F(xi��n)��С܇��ˮƽ�E�E�����Ԅәz�y�ھ��������������ܡ� 2. ���_�@ʾ��С܇��ǰ�M(j��n)�������^�������õĕr�g�� 3. ��(sh��)�F(xi��n)��С܇���E�E����һ���¶Ƞ�B(t��i)�r�ٶȵĿ��ƣ����CС܇����������(zh��n)�_�@ʾ�r�g�� �����īI(xi��n) [1] �κ꣮��Ƭ�C(j��)ԭ�����ӿڼ��g(sh��)���������������I(y��)�����磬2006 [2] ���҇���ꐄ�����Ƭ�C(j��)��(y��ng)�ü��܌�(sh��)Ӗ(x��n)�������������]늳����磬2006 [3] Ԭ��Ӣ�����䣮��Ƭ�C(j��)ԭ���c��(sh��)�(y��n)�̳̣������� ���պ����W(xu��)�����磬2006 [4] ���䣮Ԭ��Ӣ����Ƭ�C(j��)��(x��)�}�c��(y��ng)�ý̳̣������� ���պ����W(xu��)�����磬2006 [5] �S�ǂ���ȫ����W(xu��)������O(sh��)Ӌ(j��)��ِϵ�y(t��ng)�O(sh��)Ӌ(j��)�������� ���պ����W(xu��)�����磬 2006 [6] �S�ǂ���ȫ����W(xu��)������O(sh��)Ӌ(j��)��ِ�·�O(sh��)Ӌ(j��)�������� ���պ����W(xu��)�����磬 2006
�� �
���D1��늄�܇ԭ��D
���D2 늙C(j��)�(q��)���·
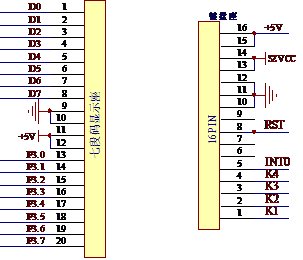
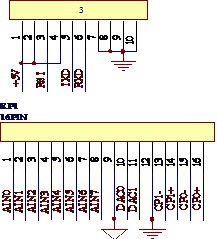
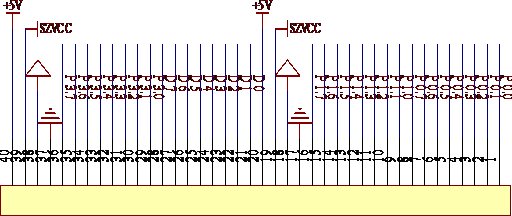
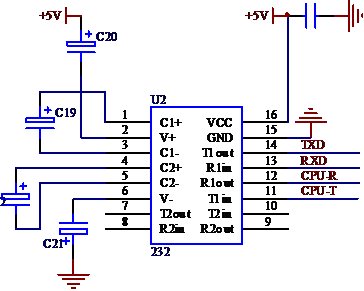
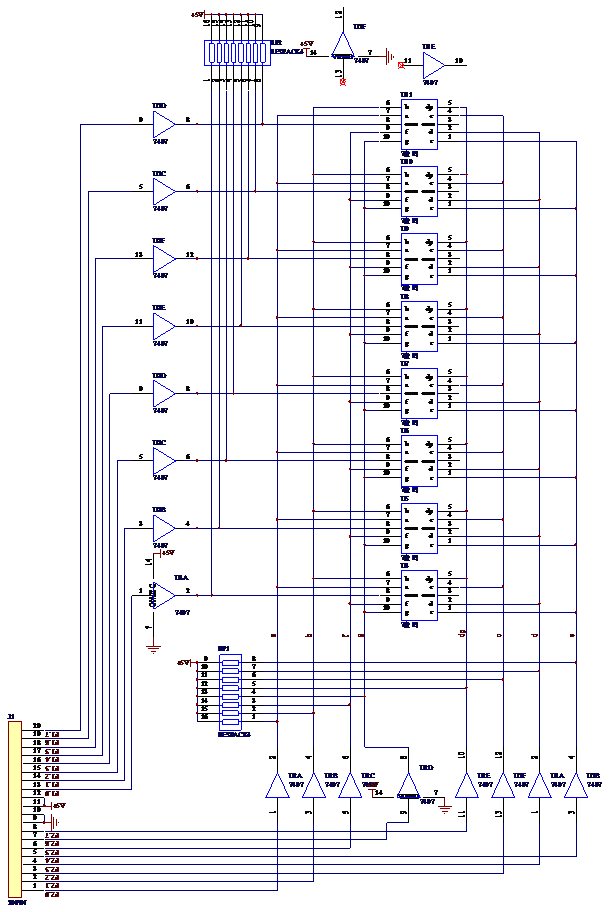
���D3 �@ʾ�·ģ�K ���D4 �Դģ�K�· ���D5 ���@ʾģ�K�·
���D6 �����������̈D
���D7 �l(f��)�]���ֳ������̈D 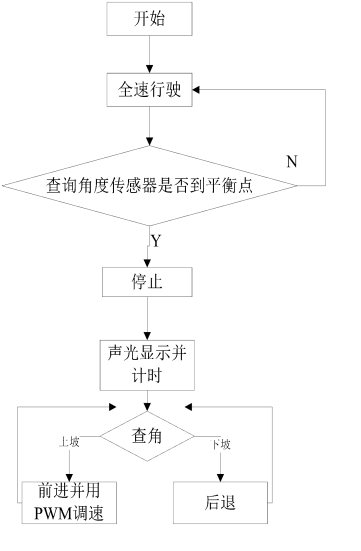
����Փ�����d��word��ʽ �ɾ�����
 ����C8051F005С܇�Ԅӿ���.rar
(170.61 KB, ���d��(sh��): 17)
����C8051F005С܇�Ԅӿ���.rar
(170.61 KB, ���d��(sh��): 17)
2017-8-31 10:14 �ς�
�c(di��n)���ļ������d����
���d�e��: �ڎ� -5
| 




 ����TQQ:125739409;���g(sh��)����QQȺ281945664
����TQQ:125739409;���g(sh��)����QQȺ281945664










 QQ���Ѻ�Ⱥ
QQ���Ѻ�Ⱥ QQ���g
QQ���g �vӍ��
�vӍ�� �vӍ����
�vӍ���� �ղ�
�ղ� ����
���� �
� ��
��