|
|
MPU6050�����˼��ٶȺͽ��ٶȂ�����,ͨ�^(gu��)STM8L��I2C�����xȡ���@Щ���ٶȺͽ��ٶȔ�(sh��)��(j��).
�xȡ���Ĕ�(sh��)��(j��)��MPU6050�ă�(n��i)��AD�ڼ��ٶȺͽ��ٶȵ�X,Y,Z�S��AD�ɘ�ֵ.����(j��) RX = ADCRx�ɘ�ֵ/�`���� ,����������S�Č�(sh��)�H����ֵ.
��(du��)���`����,�ü��ٶ�Ӌ(j��)��(l��i)�f(shu��),����O(sh��)��MPU6050�ļ��ٶ�������+-2G,���˱�ʾ+2G~-2G�@��һ��(g��)����,Ҏ(gu��)��16λ�ļĴ������λ�Ƿ�̖(h��o)λ,��ʾ��ؓ(f��),ʣ�µ�15λ��ʾ��(sh��)��(j��).��?y��n)?^15=32768,���Ԯ�(d��ng)�Ĵ����еĔ�(sh��)��(j��)��32768�r(sh��),��ʾ+2G,ͬ��-32768��ʾ-2G.1G��(y��ng)ԓ��16384,����+-2G��������,�`���Ȟ�16384.
����,��(d��ng)���ٶȵ�X�S�xȡ���Ĕ�(sh��)��(j��)��-16384,��?y��n)?16384/16384=-1,���Դ˕r(sh��)x�S�ļ��ٶȞ�-1G.
��θ���(j��)���ٶ�Ӌ(j��)����(g��)�S��ݔ��Ӌ(j��)��˕r(sh��)�ĽǶ���?
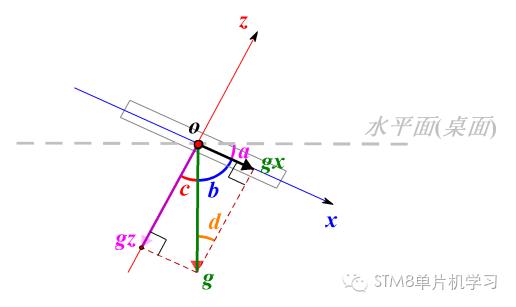
���ψD,���ٶȵ�y�S����(d��ng),x�S�@�����D(zhu��n)һ���ĽǶ�a,�@��(g��)�Ƕ���x�S�cˮƽ��ĊA��.
�ψD�е�g���������ٶ�,��(d��ng)MPU6050�����ψD�Aбһ���Ƕ�a�r(sh��),�˕r(sh��)�������ٶ���gz��gx�����ϸ���һ��(g��)����.����(j��)�����е����ķֽ�ϳ�,gx��gz�ϵķ����Ϻϳ�����.
��?y��n)�����g�����cˮƽ�洹ֱ,����a+b=90��
��?y��n)�gz�S��gx�S��ֱ,����c+b=90��
�C��c=a
����(j��)�����ϳ�,c��d����ȵ�.���Խ�a�ͽ�d����ȵ�.
tan(d)=gx/gz,��tan(a)=gx/gz
�������a,�҂����Ը���(j��)mpu6050��ݔ����(sh��)��(j��)�õ�gx/gz�ı�ֵ,�ٸ���(j��)��(sh��)�W(xu��)��ʽ�еķ�����,�Ϳ�������˕r(sh��)�ĽǶ�ֵ.
��(d��ng)���ٶȵ�x�S����(d��ng),y�S�@�����D(zhu��n)һ���ĽǶ�a�r(sh��),ͨ�^(gu��)ͬ�ӵķ���Ҳ��������˕r(sh��)�ĽǶ�.
ͨ�^(gu��)����ķ���,�҂�����ͨ�^(gu��)mpu6050������һЩ���м��ٶ�Ӌ(j��)�Ă�����,�@ȡ���w���oֹ�r(sh��),��x�S�����y�S�����cˮƽ��ĊA��.
֮�����f(shu��)���oֹ,����?y��n)��\(y��n)��(d��ng)�r(sh��)��(hu��)���\(y��n)��(d��ng)���ٶ�,�@��(du��)�ǶȵĜy(c��)����(hu��)�a(ch��n)���ɔ_,���Խ��ٶȂ������y(c��)���Ƕȕ�(hu��)���������\(y��n)��(d��ng)Ӱ푵ĸɔ_.
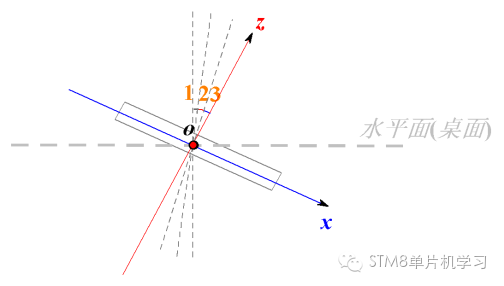
���ٶȂ�����ͬ���Ǟ��˫@�ýǶ�,���ٶ��dž�λ�r(sh��)�g��(n��i)���D(zhu��n)�^(gu��)�ĽǶ�,ע���@��һ��(g��)��(d��ng)�B(t��i)��������,���w�oֹ�r(sh��),���ٶȞ�0.���ψD,���w�@x�S�������D(zhu��n)һ���Ƕ�,�҂������D(zhu��n)�@��(g��)��(d��ng)�B(t��i)�^(gu��)�̷ֽ�,���O(sh��)��1��r(sh��),���D(zhu��n)��1λ��,��2��r(sh��),���D(zhu��n)��2λ��,��2��r(sh��),���D(zhu��n)��3λ��.����(j��)���ٶ�,���������1�����D(zhu��n)�^(gu��)�ĽǶ�,ͬ�������2��,��3��ĽǶ�,���@Щ�Ƕ����,�Ϳ��Եõ�3��ĕr(sh��)�g���D(zhu��n)�^(gu��)�ĽǶ�.
�����̵Ŀ��w˼·��,ͨ�^(gu��)STM8L�xȡMPU6050�ļ��ٶȺͽ��ٶȔ�(sh��)��(j��),����(j��)���ٶ�ֵ,���x�����y�����ϵĽǶ�׃��,�H�H��ʹ�����������ἰ�ķ����к���(sh��).Ȼ����������λ�C(j��),��(d��ng)�B(t��i)չʾӋ(j��)���ĽǶ�.
��������,��(du��)���ٶȺͽ��ٶȔ�(sh��)��(j��),�M(j��n)���˺�(ji��n)�εĻ���(d��ng)���ڞV��.STM8L�����l��8MHz,I2C��ͨ�����ʞ�400KHz,USARTͨ�����ʞ�115200.
�����̵�ҕ�l��ʾ,����ֻʹ���˼��ٶȿ��Կ���,�Ƕ�ݔ��������ʲôƽ��(w��n),�ܵ��\(y��n)��(d��ng)���ٶȵĸɔ_.
- /*Ӳ���B��*/
- // PC0<--->SDA PC1---->SCL
- //USART1_TX on PC3 and USART1_RX on PC2
- /****************************************************************************************
- *�_(k��i)�l(f��)�h(hu��n)��:IAR for stm8 v6.5.3
- *Ӳ��ƽ�_(t��i):STM8L-DISCOVERY
- *�����f(shu��)��:ͨ�^(gu��)Ӳ��I2C�ȴ��ķ���,
- *�� �ߣ����L(f��ng)
- ****************************************************************************************/
- #include"iostm8l152c6.h"
- #include"stdbool.h"
- #include"stdint.h"
- #include "math.h"
- #define x 0
- #define y 1
- #define z 2
- #define _gx mpu6050data_struct.gyro_data[x]
- #define _gy mpu6050data_struct.gyro_data[y]
- #define _gz mpu6050data_struct.gyro_data[z]
- #define _ax mpu6050data_struct.accel_data[x]
- #define _ay mpu6050data_struct.accel_data[y]
- #define _az mpu6050data_struct.accel_data[z]
- float Pitch=0;//
- float Roll=0;
- float Yaw=0;
- //Att_Angle.pit
- struct mpu6050data
- {
- int16_t gyro_data[3];//MPU6050ԭʼ���݃x���ٶ�ֵ
- int16_t accel_data[3];//MPU6050ԭʼ���ٶ�Ӌ(j��)ֵ
- // int16_t temp;//�ضȔ�(sh��)��(j��)
- int16_t gyro_offset_data[3];//ˮƽ�oֹ�r(sh��)���݃xƫ��ֵ
- int16_t accel_offset_data[3];//ˮƽ�oֹ�r(sh��)���ٶ�Ӌ(j��)ƫ��ֵ
- };
- struct mpu6050data mpu6050data_struct;
- bool bTX_finished=true;
- uint8_t ui8TX_buffer[25]={0};
- uint8_t ui8TX_counter=0;
- uint8_t ui8Read_mpu6050_buffer[14]={0};
- /******************************************************************************************************
- * �� �Q(ch��ng)��void delay_10ms(uint8_t x_ms)
- * �� �ܣ��ӕr(sh��)10ms
- * ��څ���(sh��)���o(w��)
- * ���څ���(sh��)���o(w��)
- * �f(shu��) ����
- * �� �����o(w��)
- ******************************************************************************************************/
- void delay_100ms(void)
- {
- uint8_t i,j;
- for(i=0;i<255;i++)//2*255��(g��)ָ������
- for(j=0;j<255;j++);//2*255��(g��)ָ������
- // delay_10ms������ x_ms*2*255+2*x_ms��(g��)ָ������
- // 255*2*255+2*255=130610us=130ms
- // ���ӕr(sh��)����(sh��)���ӕr(sh��)�r(sh��)�g��130ms
- // 16M/8/2=1M һ��(g��)ָ�����ڞ�1us
- }
- /******************************************************************************************************
- * �� �Q(ch��ng)��void GPIO_Init(void)
- * �� �ܣ���ʼ��PC7���������ݔ��
- * ��څ���(sh��)���o(w��)
- * ���څ���(sh��)���o(w��)
- * �f(shu��) ����
- * �� �����o(w��)
- ******************************************************************************************************/
- void GPIO_Init(void)
- {
- PC_CR1_C17 =1;//����ݔ��
- PC_CR2_C27 =1;//����ݔ��
- PC_DDR_DDR7 =1;//PC7ݔ��
- PC_ODR_ODR7 =0;//ݔ�����ƽ
- PE_CR1_C17 =1;//����ݔ��
- PE_CR2_C27 =1;//����ݔ��
- PE_DDR_DDR7 =1;//PC7ݔ��
- PE_ODR_ODR7 =0;//ݔ�����ƽ
- }
- /******************************************************************************************************
- * �� �Q(ch��ng)��void UART_Init(void)
- * �� �ܣ�UART���r(sh��)����ʼ��ϵ�y(t��ng)
- * ��� ����(sh��)���o(w��)
- * ���� ����(sh��)���o(w��)
- * �f(shu��) ����UART��ʼ���� 115200 1 8 n
- * �� �����o(w��)
- ******************************************************************************************************/
- void UART_Init(void)
- {
- /*********************************/
- PC_DDR_DDR2 =0;//ݔ��
- PC_CR1_C12 =1;//����ݔ��
- PC_CR2_C22 =0;
- PC_ODR_ODR3 =1;
- PC_CR1_C13 =1;//����ݔ��
- PC_CR2_C23 =1;//ݔ���[��10M
- PC_DDR_DDR3 =1;//ݔ�����ƽ��TX���e��B(t��i)����ƽ��������O(sh��)�ã���(hu��)Ī������İl(f��)��0x00
- CLK_PCKENR1_PCKEN15=1;//�_(k��i)��USART���O(sh��)�r(sh��)�
- //�_(k��i)�����_��UART����
- //00: USART1_TX on PC3 and USART1_RX on PC2
- //01: USART1_TX on PA2 and USART1_RX on PA3
- //10: USART1_TX on PC5 and USART1_RX on PC6
- SYSCFG_RMPCR1_USART1TR_REMAP =0;//PC2��PC3
- //�����Ҫʹ���������_���鴮�ڰl(f��)�ͽ������_��Ո(q��ng)?ji��n)��@���x��
- //�O(sh��)�ô��ڹ�����ʽ
- USART1_CR1_M =0;//1 start bit��8 data bit��n stop bit
- USART1_CR3_STOP0=0;USART1_CR3_STOP1=0;//1 stop bit
- //�O(sh��)����
- //�������O(sh��)��115200
- // 8000000/115200=69 //8000000�Ǵ˕r(sh��)ϵ�y(t��ng)�����r(sh��)��l�ʣ�4���l��16M/2=8M
- //69(DEC)=0045(HEX)
- USART1_BRR2 =0x05;//the BRR2 should be programmed before BRR1
- USART1_BRR1 =0x04;
- // USART1_CR2_TEN=0;//ʹ�ܰl(f��)��
- // USART1_CR2_TIEN=0;//���_(k��i)�l(f��)����
- // USART1_CR2_REN=1;//ʹ�ܽ���
- // USART1_CR2_RIEN=1;//���_(k��i)������
- }
- /******************************************************************************************************
- * �� �Q(ch��ng)�� IIC_init()
- * �� �ܣ���ʼ��I2C,ϵ�y(t��ng)���lλ4MHz��I2Cͨ���ٶ�λ333KHz
- * ��څ���(sh��)���o(w��)
- * ���څ���(sh��)���o(w��)
- * �f(shu��) ����PC0--SDA PC1--SCL
- * �� �����o(w��)
- ******************************************************************************************************/
- void I2C_Init(void)
- {
- //----���_(k��i)IIC���O(sh��)�r(sh��)�----
- CLK_PCKENR1_PCKEN13=1;//
- I2C1_CR1_PE=0;
- I2C1_CR2_ACK=1;
- //----I2Cݔ��r(sh��)��l���x��----
- I2C1_FREQR_FREQ=0x08;//8MHz
- /* The allowed range is between 1 MHz and 16 MHz
- 000000: not allowed
- 000001: 1 MHz
- 000010: 2 MHz
- ...
- 010000: 16 MHz */
- //----���Õr(sh��)犿��ƼĴ���----
- I2C1_CCRH=0;
- I2C1_CCRH_F_S=1; //Fast mode I2C
- I2C1_CCRH_DUTY=0;
- /* If DUTY = 0:
- Period(I2C) = 3* CCR * tMASTER
- thigh = CCR * tMASTER
- tlow = 2 * CCR * tMASTER*/
- I2C1_CCRL=7; //SCL���ƽ�r(sh��)�g����
- //I2C��SCK�r(sh��)��O(sh��)�Þ�400KHz,�tSCK���ڞ�2.5us 2.5us/0.125/3=7
- //��?y��n)�I2C1_FREQR_FREQ=0x08,��I2Cݔ��r(sh��)��l�ʞ�8M,���ڞ�0.125us
- //CCR=7�r(sh��),SCK�ĵ��ƽ�r(sh��)�g��2*tlow=2*7*0.125us=1.75us,SCk���ƽ�r(sh��)�g��thigh=7*0.125us=0.875us
- //����CCR=7�r(sh��),SCKݔ���l�ʞ�380KHz
- //----���������r(sh��)�g�Ĵ���----
- I2C1_TRISER_TRISE=5;//in standard mode, the maximum allowed SCL rise time is 1000 ns.
- //1 us / 0.125 us = 8
- //+1
- I2C1_CR1_PE=1;//
- }
- /******************************************************************************************************
- * �� �Q(ch��ng)�� uint8_t I2C_ReadOneByteDataFromSlave(uint8_t address)
- * �� �ܣ���I2C���O(sh��)�����xȡһ�ֹ�(ji��)�Ĕ�(sh��)��(j��)
- * ��څ���(sh��)��address:�xȡ��(sh��)��(j��)�ļĴ�����ַ
- * ���څ���(sh��)������һ��(g��)��I2C���O(sh��)��ָ����ַ�x���Ĕ�(sh��)��(j��)
- * �f(shu��) ����
- * �� �����o(w��)
- ******************************************************************************************************/
- uint8_t I2C_ReadOneByteDataFromSlave(uint8_t address)
- {
- volatile uint8_t t;
- //----------I2C��ʼ��̖(h��o)--------------
- I2C1_CR2_START=1;//�a(ch��n)��һ��(g��)��ʼ�l��
- while(!(I2C1_SR1_SB==1));//�xSR1�Ĵ��������SB��(bi��o)־λ
- // _5NOPS;//����(j��)��(sh��)��(j��)�փ�(c��),�z�y(c��)����(bi��o)־λ��,�����5��(g��)NOP�M(j��n)���ӕr(sh��)
- //-------�l(f��)�͌�(xi��)I2C��������ַ---------
- I2C1_DR=0xD0;//�l(f��)�͏��O(sh��)���ַ
- while(!(I2C1_SR1_ADDR==1));//�xSR1�Ĵ��������ADDR��(bi��o)־λ
- // _5NOPS;//����(j��)��(sh��)��(j��)�փ�(c��),�z�y(c��)����(bi��o)־λ��,�����5��(g��)NOP�M(j��n)���ӕr(sh��)
- if(I2C1_SR3_TRA==0)return 1;//�xSR3�Ĵ��������ADDR��(bi��o)־λ
- // 0: Data bytes received
- // 1: Data bytes transmitted
- //-----��(xi��)I2C�������Ĵ�����ַ--------
- I2C1_DR=address;
- while(!(I2C1_SR1_BTF==1));//�ȴ���ַ�l(f��)�����
- // _5NOPS;//����(j��)��(sh��)��(j��)�փ�(c��),�z�y(c��)����(bi��o)־λ��,�����5��(g��)NOP�M(j��n)���ӕr(sh��)
- //--------I2C�؏�(f��)��ʼ��̖(h��o)-----------
- I2C1_CR2_START=1;//�؏�(f��)�a(ch��n)��һ��(g��)��ʼ�l��
- while(!(I2C1_SR1_SB==1));//�xSR1�Ĵ��������SB��(bi��o)־λ
- // _5NOPS;//����(j��)��(sh��)��(j��)�փ�(c��),�z�y(c��)����(bi��o)־λ��,�����5��(g��)NOP�M(j��n)���ӕr(sh��)
- //-------�l(f��)���xI2C��������ַ---------
- I2C1_DR=0xD1;//�l(f��)�͏��O(sh��)���ַ
- while(!(I2C1_SR1_ADDR==1));//�xSR1�Ĵ��������ADDR��(bi��o)־λ
- // _5NOPS;//����(j��)��(sh��)��(j��)�փ�(c��),�z�y(c��)����(bi��o)־λ��,�����5��(g��)NOP�M(j��n)���ӕr(sh��)
- if(I2C1_SR3_TRA==1)return 1;//�xSR3�Ĵ��������ADDR��(bi��o)־λ
- //-------------ֹͣ��̖(h��o)-------------
- I2C1_CR2_ACK=0;//ACKλ������ACK��̖(h��o),��λ��0���Ԯa(ch��n)��һ��(g��)NOACK��̖(h��o)
- I2C1_CR2_STOP=1;
- //-------------�ȴ����յ���(sh��)��(j��)-------------
- while(!(I2C1_SR1_RXNE==1));//�ȴ���ַ�l(f��)�����
- //-------------�xȡ��(sh��)��(j��)-------------
- t=I2C1_DR;
- return t;
- }
- /******************************************************************************************************
- * �� �Q(ch��ng)��void I2C_WriteOneByteDataToSlave(uint8_t address,uint8_t dat)
- * �� �ܣ���(xi��)��һ�ֹ�(ji��)�Ĕ�(sh��)��(j��)��I2C�O(sh��)����
- * ��څ���(sh��)��address:��(xi��)��Ĕ�(sh��)��(j��)�惦(ch��)��ַ dat:����(xi��)��Ĕ�(sh��)��(j��)
- * ���څ���(sh��)���o(w��)
- * �f(shu��) ���� ͨ�^(gu��)MSTM8LӲ����(xi��)��I2C�O(sh��)��һ��(g��)�ֹ�(ji��)�Ĕ�(sh��)��(j��)
- * �� �����o(w��)
- ******************************************************************************************************/
- uint8_t I2C_WriteOneByteDataToSlave(uint8_t address,uint8_t dat)
- {
- volatile uint8_t t;
- I2C1_CR2_ACK=1;
- //----------I2C��ʼ��̖(h��o)--------------
- I2C1_CR2_START=1;//�a(ch��n)��һ��(g��)��ʼ�l��
- while(!(I2C1_SR1_SB==1));
- // _5NOPS;//����(j��)��(sh��)��(j��)�փ�(c��),�z�y(c��)����(bi��o)־λ��,�����5��(g��)NOP�M(j��n)���ӕr(sh��)
- I2C1_DR=0xD0;
- //--------��(xi��)I2C��������ַ-----------
- while(!(I2C1_SR1_ADDR==1));
- // _5NOPS;//����(j��)��(sh��)��(j��)�փ�(c��),�z�y(c��)����(bi��o)־λ��,�����5��(g��)NOP�M(j��n)���ӕr(sh��)
- if(I2C1_SR3_TRA==0)return 1;//�xSR3�Ĵ��������ADDR��(bi��o)־λ
- //-----��(xi��)I2C�������Ĵ�����ַ--------
- while(!(I2C1_SR1_TXE==1));
- I2C1_DR=address;
- //-------��(xi��)I2C��(sh��)��(j��)���Ĵ�����--------
- while(!(I2C1_SR1_TXE==1));
- I2C1_DR=dat;
- while(!(I2C1_SR1_TXE==1));
- while(!(I2C1_SR1_BTF==1));
- // _5NOPS;//����(j��)��(sh��)��(j��)�փ�(c��),�z�y(c��)����(bi��o)־λ��,�����5��(g��)NOP�M(j��n)���ӕr(sh��)
- //-------------ֹͣ��̖(h��o)-------------
- I2C1_CR2_STOP=1;
- return 0;
- }
- /******************************************************************************************************
- * �� �ܣ���I2C���O(sh��)���xȡ����(g��)�ֹ�(ji��)��(sh��)��(j��)
- * ��ں���(sh��):
- * ���ں���(sh��)��
- * �f(shu��) ����
- * �� ����
- * �� �ڣ�
- ******************************************************************************************************/
- uint8_t I2C_ReadMultiBytesFromSlave(uint8_t address,uint8_t *rxbuf,uint8_t len)
- {
- volatile uint8_t i=0;
- if(len==0)return 1;//�����(xi��)���ֹ�(ji��)�L(zh��ng)�Ȟ�0�˳�
- I2C1_CR2_ACK=1;
- //----------I2C��ʼ��̖(h��o)--------------
- I2C1_CR2_START=1;//�a(ch��n)��һ��(g��)��ʼ�l��
- while(!(I2C1_SR1_SB==1));//�xSR1�Ĵ��������SB��(bi��o)־λ
- //-------�l(f��)�͌�(xi��)I2C��������ַ---------
- I2C1_DR=0xD0;//�l(f��)�͏��O(sh��)���ַ
- while(!(I2C1_SR1_ADDR==1));//�xSR1�Ĵ��������ADDR��(bi��o)־λ
- if(I2C1_SR3_TRA==0)return 1;//�xSR3�Ĵ��������ADDR��(bi��o)־λ
- // 0: Data bytes received
- // 1: Data bytes transmitted
- //-----��(xi��)I2C�������Ĵ�����ַ--------
- I2C1_DR=address;
- while(!(I2C1_SR1_BTF==1));//�ȴ���ַ�l(f��)�����
- //--------I2C�؏�(f��)��ʼ��̖(h��o)-----------
- I2C1_CR2_START=1;//�؏�(f��)�a(ch��n)��һ��(g��)��ʼ�l��
- while(!(I2C1_SR1_SB==1));//�xSR1�Ĵ��������SB��(bi��o)־λ
- //-------�l(f��)���xI2C��������ַ---------
- I2C1_DR=0xD1;//�l(f��)�͏��O(sh��)���ַ
- while(!(I2C1_SR1_ADDR==1));//�xSR1�Ĵ��������ADDR��(bi��o)־λ
- if(I2C1_SR3_TRA==1)return 1;//�xSR3�Ĵ��������ADDR��(bi��o)־λ
- //-------------�xȡ��(sh��)��(j��)-------------
- if(len>1)
- {
- for( i=len;i>1;i-- )
- {
- while(!(I2C1_SR1_RXNE==1));//�ȴ�I2C1_DR���յ���(sh��)
- *rxbuf++ = I2C1_DR;
- }
- }
- //-------------ֹͣ��̖(h��o)-------------
- I2C1_CR2_ACK=0;//ACKλ������ACK��̖(h��o),��λ��0���Ԯa(ch��n)��һ��(g��)NOACK��̖(h��o)
- I2C1_CR2_STOP=1;
- while(!(I2C1_SR1_RXNE==1));//�ȴ�I2C1_DR���յ���(sh��)
- *rxbuf++ = I2C1_DR;
- return 0;
- }
- /******************************************************************************************************
- * �� �ܣ�MPU6050��ʼ��
- * ��ں���(sh��):
- * ���ں���(sh��)��
- * �f(shu��) ����
- * �� ����
- * �� �ڣ�
- ******************************************************************************************************/
- void MPU6050_Config(void)
- {
- I2C_WriteOneByteDataToSlave(0x6B,0x02);//�Դ����,����MPU6050,�r(sh��)�Դ�x��:Y�S���݃x�r(sh��)犱��l
- // I2C_WriteOneByteDataToSlave(0x6B,0x00);//�Դ����,����MPU6050,�r(sh��)�Դ�x��:Y�S���݃x�r(sh��)犱��l
- I2C_WriteOneByteDataToSlave(0x1B,0x18);//���݃x������� +-2000��ÿ��
- I2C_WriteOneByteDataToSlave(0x1C,0x1F);//���ٶȶ�������� +-2G
- I2C_WriteOneByteDataToSlave(0x19,0x00);//���݃x�ɘ��ʣ������l��8khz
- I2C_WriteOneByteDataToSlave(0x1A,0x00);//�����õ�ͨ�V����
- // I2C_WriteOneByteDataToSlave(0x1A,0x01);//ʹ�Ô�(sh��)�ֵ�ͨ�V����
- }
- /******************************************************************************************************
- * �� �ܣ�ԓ����(sh��)�B�m(x��)�xȡ,MPU6050ݔ���ļ��ٶȺͽ��ٶȔ�(sh��)��(j��)
- * ��ں���(sh��):a�����xȡ����(sh��)��(j��)�Ĕ�(sh��)�M��
- * ���ں���(sh��)��
- * �f(shu��) ������mpu6050.h�^�ļ��к궨�x���@��(g��)�xȡmpu6050��(sh��)��(j��)�ĺ���(sh��)��һ�в��㌑(xi��)����(sh��)�������M(j��n)���˺궨�x
- * �� ����
- * �� �ڣ�
- ******************************************************************************************************/
- #define Read_Data_form_MPU6050(a) I2C_ReadMultiBytesFromSlave(0x3B,a,14)//�xȡmpu6050ݔ���ļ��ٶȺͽ��ٶȔ�(sh��)��(j��)
- /******************************************************************************************************
- * �� �ܣ�
- * ��ں���(sh��):
- * ���ں���(sh��)��
- * �f(shu��) ��:���xȡ���ĸ�8λ�͵�8λ��(sh��)��(j��)�ϲ���һ��(g��)������16λ��(sh��)��(j��)
- * �� ����
- * �� �ڣ�
- ******************************************************************************************************/
- #define ACC_N 10
- #define GYRO_N 2
- void MPU6050_Data_Compose(uint8_t *buf)
- {
- static uint8_t acc_cnts=0,gyro_cnts=0;
- static int16_t Data_ACC[3][ACC_N]={0};
- static int16_t Data_GYRO[3][GYRO_N]={0};
- static int32_t sum_acc_x=0,sum_acc_y=0,sum_acc_z=0;
- static int32_t sum_gyro_x=0,sum_gyro_y=0,sum_gyro_z=0;
- //----�ϳɼ��ٶȺͽ��ٶȔ�(sh��)��(j��)----
- mpu6050data_struct.accel_data[x]=((int16_t)buf[0]<<8) + buf[1];// - mpu6050data_struct.accel_offset_data[x] ;
- mpu6050data_struct.accel_data[y]=((int16_t)buf[2]<<8) + buf[3];// - mpu6050data_struct.accel_offset_data[y];
- mpu6050data_struct.accel_data[z]=((int16_t)buf[4]<<8) + buf[5];// - mpu6050data_struct.accel_offset_data[z];
- mpu6050data_struct.gyro_data[x] = ((int16_t)buf[8]<<8) + buf[9];// - mpu6050data_struct.gyro_offset_data[x];
- mpu6050data_struct.gyro_data[y] = ((int16_t)buf[10]<<8) + buf[11];// - mpu6050data_struct.gyro_offset_data[y];
- mpu6050data_struct.gyro_data[z] = ((int16_t)buf[12]<<8) + buf[13];// - mpu6050data_struct.gyro_offset_data[z];
- //----��(du��)���ٶ��M(j��n)�л���(d��ng)���ڞV��----
- sum_acc_x-=Data_ACC[x][acc_cnts]; //�pȥ���f��һ��(g��)��(sh��)��(j��)
- sum_acc_y-=Data_ACC[y][acc_cnts];
- sum_acc_z-=Data_ACC[z][acc_cnts];
- Data_ACC[x][acc_cnts]=mpu6050data_struct.accel_data[x];//�pȥ���f��һ��(g��)��(sh��)��(j��)
- Data_ACC[y][acc_cnts]=mpu6050data_struct.accel_data[y];
- Data_ACC[z][acc_cnts]=mpu6050data_struct.accel_data[z];
- sum_acc_x+=Data_ACC[x][acc_cnts];
- sum_acc_y+=Data_ACC[y][acc_cnts];
- sum_acc_z+=Data_ACC[z][acc_cnts];
- acc_cnts++;
- if(acc_cnts==ACC_N)acc_cnts=0;
- mpu6050data_struct.accel_data[x]=sum_acc_x/ACC_N;//��ƽ��ֵ
- mpu6050data_struct.accel_data[y]=sum_acc_y/ACC_N;
- mpu6050data_struct.accel_data[z]=sum_acc_z/ACC_N;
- //----��(du��)���ٶ��M(j��n)�л���(d��ng)���ڞV��----
- sum_gyro_x-=Data_GYRO[x][gyro_cnts];//�pȥ���f��һ��(g��)��(sh��)��(j��)
- sum_gyro_y-=Data_GYRO[y][gyro_cnts];
- sum_gyro_z-=Data_GYRO[z][gyro_cnts];
- Data_GYRO[x][gyro_cnts]=mpu6050data_struct.gyro_data[x];
- Data_GYRO[y][gyro_cnts]=mpu6050data_struct.gyro_data[y];
- Data_GYRO[z][gyro_cnts]=mpu6050data_struct.gyro_data[z];
- sum_gyro_x+=Data_GYRO[x][gyro_cnts];//�������µĔ�(sh��)��(j��)
- sum_gyro_y+=Data_GYRO[y][gyro_cnts];
- sum_gyro_z+=Data_GYRO[z][gyro_cnts];
- gyro_cnts++;
- if(gyro_cnts==GYRO_N)gyro_cnts=0;
- mpu6050data_struct.gyro_data[x]=sum_gyro_x/GYRO_N;//��ƽ��ֵ
- mpu6050data_struct.gyro_data[y]=sum_gyro_y/GYRO_N;
- mpu6050data_struct.gyro_data[z]=sum_gyro_z/GYRO_N;
- }
- /******************************************************************************************************
- * �� �ܣ�
- * ��ں���(sh��):
- * ���ں���(sh��)��
- * �f(shu��) ����
- * �� ����
- * �� �ڣ�
- ******************************************************************************************************/
- void Prepare_Data(void)
- {
- Read_Data_form_MPU6050(ui8Read_mpu6050_buffer);
- MPU6050_Data_Compose(ui8Read_mpu6050_buffer);
- }
- /******************************************************************************************************
- * �� �ܣ��l(f��)���w���ˑB(t��i)��(sh��)��(j��)�o������λ�C(j��)
- * ��ں���(sh��):
- * ���ں���(sh��)��
- * �f(shu��) ��������(j��)������λ�C(j��)�f(xi��)�h�l(f��)�͔�(sh��)��(j��)
- * �� ����
- * �� �ڣ�
- ******************************************************************************************************/
- void SendDataToStatus(void)
- {
- int16_t _tmp;
- uint8_t sum = 0,i=0;
- ui8TX_buffer[0]=0xAA;
- ui8TX_buffer[1]=0xAA;
- ui8TX_buffer[2]=0x01;
- ui8TX_buffer[3]=12;
-
- _tmp = (int16_t)(Roll*100);//���L�_
- ui8TX_buffer[4] = (_tmp&0xFF00)>>8;//acc
- ui8TX_buffer[5] = _tmp&0x00FF;
-
- _tmp = (int16_t)(Pitch*100);//������
- ui8TX_buffer[6] = (_tmp&0xFF00)>>8;
- ui8TX_buffer[7] = _tmp&0x00FF;
-
- _tmp = (int16_t)(Yaw*100);//ƫ����
- ui8TX_buffer[8] = (_tmp&0xFF00)>>8;
- ui8TX_buffer[9] = _tmp&0x00FF;
-
- ui8TX_buffer[10]=0;//�](m��i)�г�����ֻ�ðl(f��)�͟o(w��)Ч��(sh��)��(j��)
- ui8TX_buffer[11]=0;
- ui8TX_buffer[12]=0;
- ui8TX_buffer[13]=0;
- ui8TX_buffer[14]=0;//�w��ģʽ
- ui8TX_buffer[15]=0;//���i/���i
-
- for(i=0;i<16;i++)
- sum += ui8TX_buffer[i];
-
- ui8TX_buffer[16] = sum;
- ui8TX_counter=17;
- PC_ODR_ODR7 ^=0x01;
- USART1_CR2_TEN=1;//���_(k��i)�l(f��)��
- USART1_CR2_TIEN=1;//���_(k��i)�l(f��)����
- }
- void main(void)
- {
- delay_100ms();
- CLK_CKDIVR =0x01;//8M
- GPIO_Init();
- UART_Init();
- I2C_Init();
- MPU6050_Config();
- asm("rim"); //enable interrupts
- while(1)
- {
- if(true==bTX_finished)
- {
- bTX_finished=false;
- Prepare_Data(); //�xȡMPU6050ԭʼ��(sh��)��(j��),����(du��)��(sh��)��(j��)�M(j��n)�к�(ji��n)�ΞV��
- Pitch=atan((float)_ax/(float)_az)*57.3; //y�S�̶�,x�S�����cˮƽ����A��
- Roll=atan((float)_ay/(float)_az)*57.3; //x�S�̶�,y�S�����cˮƽ����A��
- SendDataToStatus();//�l(f��)���ˑB(t��i)��(sh��)��(j��)����λ�C(j��)
- }
- // asm("wfi");
- }
- }
- /*************************************************************************************************** ***
- * �� �Q(ch��ng)�� UART_OnTx()
- * �� �ܣ� UART��Tx�¼�̎������(sh��)
- * ��څ���(sh��)���o(w��)
- * ���څ���(sh��)���o(w��)
- * �f(shu��) �����l(f��)��ui8TX_buffer��(sh��)�M�еĔ�(sh��)��(j��)���l(f��)����ɺ���λbTX_finished��(bi��o)־λ����һ���M(j��n)���Д���P(gu��n)�]�l(f��)��
- * �� �����o(w��)
- ******************************************************************************************************/
- #pragma vector=USART_T_TXE_vector
- __interrupt void USART_TX_ISR (void)
- {
- static uint8_t cnts=0;
- static bool bSend_EndByte=false;//�l(f��)�����һ�ֹ�(ji��)��(sh��)��(j��)
- if(bSend_EndByte && USART1_SR_TC==1)
- {
- USART1_CR2_TIEN=0;//�P(gu��n)�]�l(f��)����
- USART1_CR2_TEN=0;//�P(gu��n)�]�l(f��)��
- bSend_EndByte=false;
- bTX_finished=true;
- }
- else if(USART1_SR_TC==1)
- {
- USART1_DR=ui8TX_buffer[cnts++];
- if(cnts==ui8TX_counter)
- {
- cnts=0;
- bSend_EndByte=true;
- }
- }
- }
- /******************************************************************************************************
- * �� �Q(ch��ng)�� UART_OnRx()
- * �� �ܣ� UART��Tx�¼�̎������(sh��)
- * ��� ����(sh��)���o(w��)
- * ���� ����(sh��)���o(w��)
- * �f(shu��) ����
- * �� �����o(w��)
- ******************************************************************************************************/
- //#pragma vector=USART_R_RXNE_vector
- //__interrupt void USART_RX_ISR(void)
- //{
- // static uint8_t ui8RX_temp=0;
- // if(USART1_SR_RXNE==1)
- // {
- // ui8RX_temp = USART1_DR;
- // }
- //}
|
|





 ����TQQ:125739409;���g(sh��)����QQȺ281945664
����TQQ:125739409;���g(sh��)����QQȺ281945664





 QQ���Ѻ�Ⱥ
QQ���Ѻ�Ⱥ QQ���g
QQ���g �vӍ��
�vӍ�� �vӍ����
�vӍ���� �ղ�
�ղ� ����
���� �
� ��
��