|
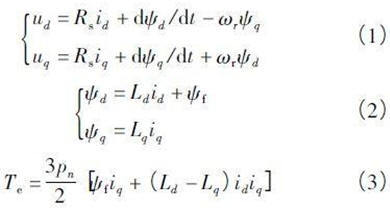
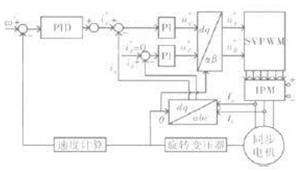
引言 大扭矩永磁同步電機直接驅動由于去掉了復雜的機械傳動機構,從而消除了機械結構帶來的效率低、維護頻繁、噪聲與轉動慣量大等不利因素,具有效率高、 振動與噪聲小、精度高、響應快、使用維修方便等一系列突出優點[1]。近年來,隨著電力電子技術、永磁材料、電機設計與制造技術、傳感技術、控制理論等的 發展,大扭矩永磁同步電機在數控機床、礦山機械、港口機械等高性能系統中得到了越來越廣泛的應用[2 - 3]。 交流電機控制系統廣泛采用單片機、DSP、FPGA為控制系統核心。STM32 是一種基于ARM 公司Cortex-M3 內核的新型32 位閃存微控制器,采用了高性能、高代碼密度的Thumb-2 指令集和緊耦合嵌套向量中斷控制器,擁有豐富的外圍接口,具有高性能、低成本、低功耗等優點[4]。本文針對一種港口機械用大扭矩永磁同步電機驅動系統, 采用STM32 + IPM 硬件構架設計了高性能、低成本的控制系統。 1 大扭矩永磁同步電機矢量控制原理 忽略電機的鐵心飽和、渦流及磁滯損耗,不計漏磁通的影響,大扭矩永磁同步電機的電壓、磁鏈、轉矩方程分別為式中, ψd、ψq、ud、uq、id、iq、Ld、Lq分別為永磁同步電機d、q軸的磁鏈、電壓、電流和電感,Rs為電樞繞組電阻,ωr為轉子角速度,ψf為永磁體產生的與轉子交鏈的磁鏈,Te為電磁轉矩,Pn為電機磁極對數。 由式(3),控制id=0使定子電流矢量位于q軸,此時轉矩Te和iq呈線性關系,實現電磁轉矩的解耦控制。如圖1所示,本文的永磁同步電機采用速度、電流雙閉環控制,圖中ω*為給定速度指令,ω為速度反饋,將速度誤差輸入速度控制器,輸出交軸電流指令i*q,通過電流PI控制器和坐標變換,再利用SVPWM產生IPM開關信號。 圖1 大扭矩永磁同步電機控制原理框圖 2 系統設計 圖2 所示為該系統結構框圖,本文采用STM32F103VCH6主控芯片、PM800HSA120智能功率模塊為系統核心,硬件控制系統主要有:處理器模塊;檢測模塊,主要包括霍爾電流檢測、旋轉變壓器接口電路;主電路,主要由整流、軟啟動、濾波、制動電路,以及PM800HSA120及其驅動、保護、吸收電路組成;開關電源及其他模塊,主要由多路DC/DC轉換、直流母線電壓保護、溫度檢測保護等電路組成。 圖2大扭矩永磁同步電機硬件系統結構框圖
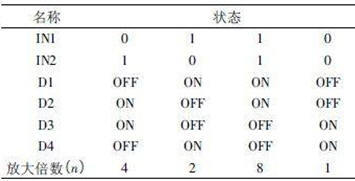
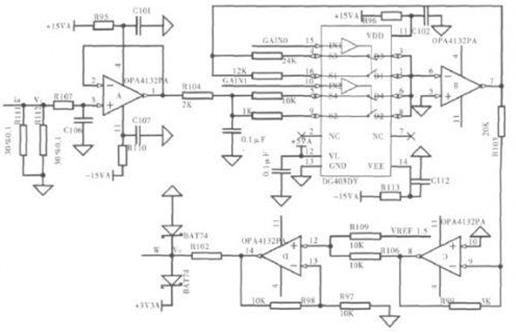
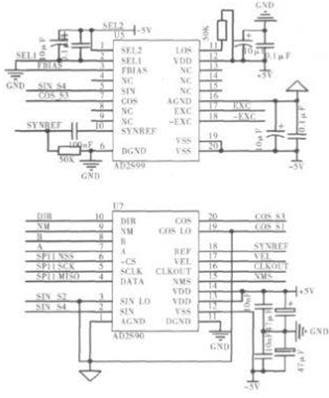
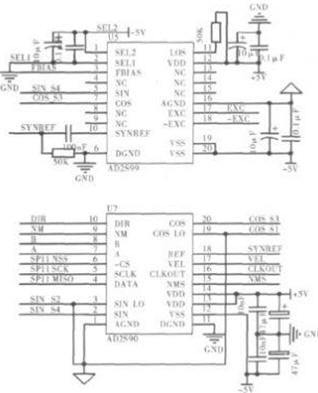
2.1 硬件系統設計 2.1.1處理器模塊 STM32F103VCH6是基于ARM公司Cortex-M3內核的新型32位閃存微控制器,擁有三級流水線和分支預測功能,最高工作頻率為72MHz,可以滿足本系統處理速度和實時性的需求,有兩個高性能的12位的16通道A/D轉換器、兩個16位專為電機驅動設計的內嵌死區控制6-PWM定時器,片上還集成有SPI、USB2.0等豐富的外設和接口[5]。如圖2所示,本系統充分利用了STM32的片上資源,利用它來接收、處理電流、位置等反饋信號,接收、處理各種出錯保護信號,執行電機控制算法等。 2.1.2檢測模塊 檢測模塊主要包括電流檢測電路和位置檢測電路。其中電流檢測采用萊姆電流型霍爾傳感器LT308-S7,其具有抗干擾能力強、靈敏度高、線性度好、溫漂小等優點。為了減小在電流較弱時的檢測誤差,本文設計了如圖3所示的增益可調的電流檢測電路,傳感器輸出的電流信號經過精密電阻采樣后轉換為電壓信號Vi,經過電壓跟隨電路、三級放大電路和肖特基二極管鉗位電路,輸出電壓Vo(Vo=3nVi/20+1.5,n為放大倍數)到STM32的A/D模塊進行處理。其中開關芯片DG403由STM32控制,用于調整電流檢測電路增益,小電流選擇大增益,大電流反之。由于大扭矩電機額定電流可達232A,若檢測電路增益不可調,則當電流較弱時檢測電路的放大增益相對較小,電流的檢測精度會降低,而采用增益可調的檢測電路可以在電流較弱時提高增益,從而減小檢測誤差,提高電流檢測的分辨率。 表1 為DG403控制信號與電流檢測電路增益放大倍數的對應關系。 表1DG403控制信號與增益放大倍數對應表 考慮港口機械存在較強振動和沖擊[6],本文利用旋轉變壓器YS 210XFDW9574A進行位置檢測。其解碼電路如圖4所示,采用AD2S99芯片為旋轉變壓器提供激勵信號,AD2S90芯片作為旋轉變壓器/數字轉換器(RDC)。AD2S90以同步串行方式(SPI)與控制芯片STM32之間進行通訊,AD2S99的勵磁信號源的頻率可以通過SEL1、SEL2、FBIAS引腳進行設置,此處激磁頻率設為10KHz,通過AD2S99內部處理后產生的輸出信號SYNREF與AD2S90的REF腳相連,可以補償旋轉變壓器一次側到二次側的相位偏差,保證它的轉換精度。 圖3 電流檢測電路 圖4 旋轉變壓器解碼電路 圖5 所示為旋轉變壓器激勵調理電路,旋轉變壓器激勵信號由AD2S99提供,激勵調理電路對激勵信號進行放大、濾波,激勵調理電路的外部電源采用±15V雙電源供電,保證電路靜態工作點調零;Ci1為耦合電容,隔直通交;Cf1為補償相位用;NPN和PNP三極管構成推挽電路,用以消除交越失真。 圖5 旋轉變壓器激勵調理電路
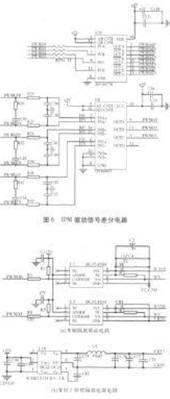
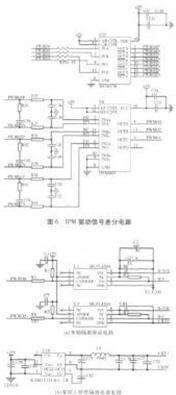
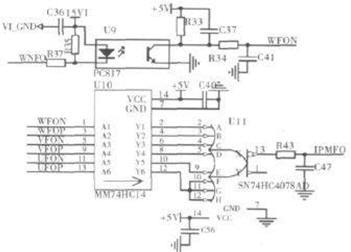
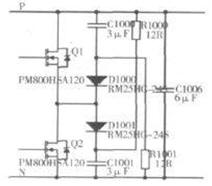
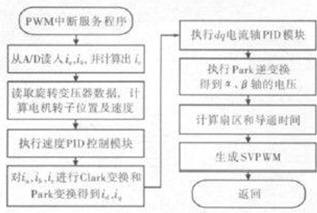
2.1.3主電路 主電路的整流電路采用了DD600N12整流模塊;軟啟動電路采用CM600HU-24F型號IGBT功率開關取代繼電器以提高系統可靠性,當電容器組充電到母線額定電壓的80%時,將IGBT接入電路;濾波電路選擇16個6800μF電解電容;制動電路選擇CM400HU-24F型號IGBT作為開關元件。考慮大電流功率器件的干擾、散熱及經濟性等因素,選擇6個獨立單元的IPM模塊PM800HSA120的逆變電路方案。PM800HSA120內部集成有驅動和保護電路,具有過壓、欠壓和溫度保護功能,額定電流800A,反偏電壓1200V,工作頻率可達20kHz。為了進一步提高IPM的抗干擾性和可靠性,本文對其驅動電路和保護電路進行了加強設計和一些額外處理。如圖6所示,對IPM的驅動信號進行了差分處理,將控制芯片STM32發出的六路驅動信號利用差分驅動芯片變為12路信號,再在IPM驅動板上利用差分接收芯片還原為6路驅動信號,然后經過高速光耦的隔離驅動再送給IPM,如圖7所示,以抑制共模干擾信號,增強了IPM驅動信號的抗干擾性。圖7(a)所示為W相的隔離驅動電路;三相上橋臂采用隔離電源供電,三相下橋臂由一路15V供電,圖7(b)所示為W相上橋臂隔離電源電路。 IPM 的故障信號處理電路如圖8所示,出錯信號先經過光耦隔離、濾波,然后經過反相施密特觸發器,一方面將電壓信號反向,另一方面對出錯信號進行波形整形,對干擾信號有一定的抑制作用。最后再將處理過的IPM出錯信號輸入控制芯片STM32做出相應處理。 圖8 IPM出錯信號處理電路 由于IPM的開關頻率較高,而在功率回路中存在寄生電感,在IPM開關過程中會產生很高的浪涌電壓,造成對器件的沖擊,影響器件的性能及使用壽命。為此設計了如圖9所示的IPM緩沖電路,以降低IPM開通和關斷過程的電壓和電流尖峰,從而降低器件開關損耗,保護器件安全運行。其中,選擇超快恢復二極管RM25HG-24S作為緩沖二極管,其耐壓1200V,最大反向恢復時間300ns;綜合考慮本系統驅動電流頻率及IPM本身性能,將IPM工作頻率選為8KHz,取直流母線寄生電感50nH,根據計算及試驗,最終選擇緩沖電容Cs=3μF,緩沖電阻Rs=12Ω。 圖9 IPM緩沖電路 2.2系統軟件設計 系統軟件主要由主程序和中斷服務程序構成,其中主程序完成各種軟硬件的初始化、電機初始位置檢測和電機啟動等,中斷服務程序包括PWM中斷子程序和外部中斷保護子程序等。其中PWM中斷子程序是控制系統核心,主要完成對轉子電流和速度的采集與處理、PID調節、電壓矢量的計算與選擇、PWM發生等。外部中斷子程序主要包括母線電壓過、欠壓保護、啟動保護和溫度保護等。當IPM有出錯信號時,STM32控制高級控制定時器的TIM1_BKIN信號禁止PWM輸出,保證系統的安全,圖10為PWM中斷服務程序流程圖。 圖10 PWM中斷服務程序
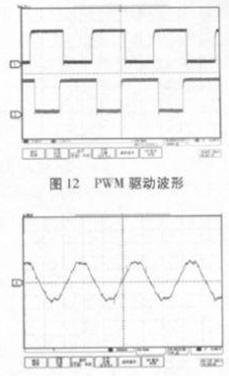
3 實驗結果 如圖11所示,為本文所設計永磁同步電機控制系統的STM32控制板及IPM驅動板實物。對一臺額定功率132kW、額定電流232A、輸入電壓380V的大扭矩永磁同步電機進行了單元及系統實驗。圖12所示為W相上下橋臂的PWM波形,測試PWM頻率為8KHz(周期125μs);圖13所示為電機空載運行時W相的電流波形,表明控制系統的軟硬件模塊均可有效運行。 圖11控制電路 4 結語 本文提出了一種基于STM32的大扭矩永磁同步電機的控制系統,設計了STM32處理器模塊、增益可調的電流檢測電路、旋轉變壓器接口電路、IPM驅動保護電路等,采用矢量控制方法,實現了永磁同步電機速度和轉矩控制,并進行了試驗驗證,為大扭矩永磁同步電機驅動控制提供了一種穩定可靠、高性價比的方案。
| 








 QQ好友和群
QQ好友和群 QQ空間
QQ空間 騰訊微博
騰訊微博 騰訊朋友
騰訊朋友 收藏
收藏 淘帖
淘帖 頂
頂 踩
踩

