|
整理:MilerShao 某日一工程師跟我反映,他在使用STM8S芯片開發產品,用到某ADC通道,使用連續采集模式,開啟ADC轉換結束中斷。整個中斷程序執行時間大概200多us,因為連續采集轉換,在這個ISR處理過程中可能會有新的EOC標志產生。 他發現一個奇怪的現象,ADC中斷服務程序能夠不停的自己嵌套自己,仿佛進入了遞歸嵌套,最后導致堆棧溢出跑飛而令系統復位。在調試過程中也的確能發現ADC中斷服務程序有連續多次入棧的情況。 
后來他發現這個異常跟在ADC ISR中首尾分別加了一句關中斷和開中斷語句有關。即在ISR的開頭加了disableInterrupt(); ISR結尾部分加了 enableInterrupt(); 

如果拿掉首尾那2句開關中斷的代碼就一切正常。現在最大的疑問就是為什么加了這兩句開關中斷代碼會導致ADC中斷服務程序能自己嵌套自己?按道理說應該沒有影響才對啊? 關于中斷函數不少人可能會這樣寫,在ISR的首尾分別加上關中斷和開中斷指令,尤其51系列過來的人,經常會在進中斷后來一句CLR EA,中斷退出之前補一句 SETB EA之類的指令。51系列芯片那樣寫是沒有問題的。 那對于STM8芯片來講,這樣寫很可能就會出問題。有時或許有跟上面一樣的寫法而沒有出問題,那是因為你程序簡單沒有復雜的多中斷響應事件,或者說即使某時段只有單一中斷源,但在中斷響應過程中并無新的中斷請求發生。 說實在的,要解釋上面工程師的疑問,有點說來話長。不妨先直接說出原因,有興趣的話就細看技術資料或下面的分析。 顯然,問題就出在他在ISR里面做了關中斷、開中斷的操作,隨意了改變正在執行的中斷服務程序的中斷優先級而導致的問題。 那個disableInterrupt();函數所對應的匯編指令就是SIM,該指令就是關閉所有可屏蔽的中斷請求,此時執行程序所處中斷優先級為L3,即軟件中斷禁用級。正因為如此,此時不會發生RESET/TRAP/TLI以外的中斷。 下面截圖是STM8技術手冊關于SIM指令的描述。在復位后的程序開始使用該指令是沒用的。【為什么沒用呢,因為程序復位后所處中斷優先級就是L3。等會下面還會提到。】 紅色方框內那句明確說明,在中斷執行程序的開頭不需使用該指令【SIM】,因為當前中斷程序的優先級已經被自動的在CC寄存器中L1,L0位設定。【到底怎么設定自動的呢,下面文字在講ITC_SPR寄存器時有描述。】 
再來看看 enableInterrupt(); 其實它所對應的匯編指令就是 RIM.該指令就是解除所有中斷屏蔽,允許各路中斷請求。執行該指令后,此時執行程序所處中斷優先級為L0,即主程序運行級別,屬于最低優先級別。換句話說,此時任何新的或待處理的中斷請求都可以中斷或打斷當前的執行程序。 下面是STM8相關技術手冊對RIM指令的描述。它說該指令一般放在復位之后的主程序代碼里,并提示在WFI/HALT指令前無須使用該指令。【此處并未對該提示作細節展開。它意思是說WFI/HALT指令還具備跟RIM指令同樣的解除中斷屏蔽、允許中斷請求的功效。】 
好,那我們結合上面案例具體分析下。 先假設上面那位工程師對ADC中斷的軟件優先級設置為2.【當然也可設置為3或1】 當ADC產生EOC中斷請求進入中斷服務程序【ISR】后,他首先來個SIM指令【即disableInterrupt();】,此時ISR程序不管剛才響應時刻的中斷優先級是多少,現在被強行更改變為L3。從這點看,這個指令用得就顯得隨意或任性,在有多個中斷源的情況下,有可能無意中改變了設計者關于各個中斷響應輕重緩急的先后秩序的初衷。 繼續回到這個話題。當ADC ISR執行一定時間后,在IRET返回前他又來個RIM指令。前面我們介紹了RIM指令的作用,此時ISR的中斷優先級又由剛才的L3跳到L0,即最低軟件優先級。可此時外邊侯著的新的ADC EOC中斷請求,它的軟件中斷優先級一定高于L0,機會來了,不用等本次ISR執行完,立即嵌套進入下一輪ADC ISR 程序。每進一次還要壓一次棧,這樣多次循環下去,直至堆棧穿底,PC亂飛,系統崩潰復位。 原因大致就這樣,不要想當然、隨意地在ISR里面添加些影響執行程序優先級的指令,換句話說你在使用類似SIM/RIM指令時一定要心里清楚在做什么,有什么目的,會對當前中斷程序優先級產生什么影響。 如果希望在執行某中斷程序時不要被其它可屏蔽的中斷請求打斷,怎么辦呢?很簡單,將相關中斷的ITC_SPR寄存器中相應軟件優先級位配置為L3即可。當中斷程序執行完畢退出后再回到之前的軟件中斷優先級。 關于STM8中斷原理,個人覺得技術資料講得不是很細致。這里根據個人的理解做了個簡單的總結,一起分享下。并在后面用個實例驗證上面的分析結論。
STM8中斷可分為不可屏蔽中斷和可屏蔽中斷。不可屏蔽中斷是指RESET,TRAP,TLI.可屏蔽中斷是指那些基于GPIO的外部中斷和其它外設中斷。 
中斷優先級分硬件優先級和軟件優先級。硬件優先級是固定的,參照各芯片數據手冊里的中斷矢量表的序號來定,序號越小硬件優先級越高。各中斷源或事件的軟件中斷優先級可以通過寄存器編程配置,其中RESET,TRAP非屏蔽中斷事件無軟件中斷優先級。 
中斷的管理主要基于兩個寄存器,一個是CCR,一個是ITC_SPRx. 其中CCR寄存器中的L1和L0位表示當前程序執行代碼所處中斷優先級。ITC_SPRx.各寄存器分別對應各個中斷服務程序的軟件中斷優先級,用戶可自行配置各中斷服務程序所處的中斷優先級。軟件中斷優先級分為4級,從低往高依次是LEVEL0,LEVEL1,LEVEL2,LEVEL3,分別對應CCR寄存器中的L1、L0位的10,01,00,11。 L0級即用戶主程序級,就是程序處在按部就班的用戶主程序代碼執行狀態,為最低軟件優先級。此時CCR寄存器中的L1、L0為10。 L3級又稱軟件中斷禁用級。這個地方的表述和理解可能有點費勁。在L3軟件中斷優先級狀態下,不會發生軟件中斷,即所謂的中斷關閉狀態。此時CCR寄存器中的L1、L0為11。其中,RESET\TRAP\TLI三個中斷源是特例,可以打斷L3優先級狀態下的執行程序而產生中斷。 總之,STM8芯片任何時刻的程序執行總處于某一軟件中斷優先級狀態,其軟件中斷優先級由當前CCR寄存器中的L1、L0位決定。理解這個概念很重要。 下面截圖是對CCR寄存器描述,系統復位后的默認值為0x28,對應到L1\L0就是11。即系統復位后中斷軟件優先級為L3,軟件中斷禁用級,也就是中斷關閉狀態。這也正好印證了上面講SIM指令時,芯片復位后使用SIM沒啥意義。因為芯片復位后程序執行就處于軟件中斷禁用級。 

上面提到,各個可屏蔽中斷源的軟件中斷優先級可以通過ITC_SPRx 寄存器進行配置。一共8個ITC_SPR寄存器,每個寄存器最多可以配置4個中斷源的軟件中斷優先級。當某中斷請求得到響應時,該寄存器里相應中斷源的VECTnSPR[1:0] 兩位數據會自動載入到CCR寄存器中的L1、L0位進而決定該中斷服務程序所處軟件中斷優先級。所以,在各中斷服務程序里除非有需要,不要在中斷服務程序里隨意使用類似SIM/RIM這些導致改變執行程序中斷優先級的指令。否則,程序優先級改變了而自己可能還不知曉。 
我們說中斷,提優先級,無非就是為了擬定妥善處理多個中斷事件發生競爭時的處理規則。對于STM8芯片,在同一時刻多個中斷請求發生時,響應規則如下: 中斷請求中相對最高軟件優先級的中斷先響應; 如果軟件優先級一樣,硬件優先級相對最高的先響應; 
 當某中斷程序正在執行時外部又產生了新的中斷請求的處理規則: 如果新的中斷請求的軟件中斷優先級高于正在執行的中斷程服務序的中斷優先級時,當前中斷程序將被打斷,保護好當前現場后轉而去執行新的高優先級中斷程序。即發生中斷程序嵌套。因為軟件中斷優先級最高為3,不難理解當正在執行的中斷程序的優先級為L3時是不可能再被RESET,TRAP,TLI以外的中斷事件打斷的,即呈現軟件中斷關閉狀態。 另外,如果在中斷服務程序里使用HALT,POPCC,RIM,SIM和WFI都可能會改變當前中斷服務程序的中斷優先級。 當在某ISR執行過程中調整L1、L0的值修改軟件中斷優先級,同時該中斷請求標志沒來及清除或新的中斷請求已經產生,如果修改L1\L0后的新中斷請求之軟件中斷優先級高于當前中斷服務程序的優先級,這時就會發生中斷重入,即該中斷會被重新響應,重新運行該中斷服務程序。上面工程師遇到的異常現象就是這種情形。 最后,以TIM1溢出更新中斷服務程序為例,結合具體的測試代碼一起驗證下。此處把TIM1的溢出周期設置為2MS,TIM1中斷執行時間大概16ms【當然是指不被中斷的情況】,這樣設計的目的是為了保證在中斷服務程序執行過程中有新的TIM1溢出中斷請求發生。中斷程序要做的事情很簡單,就是將某個IO口的電平先高后底各近8MS然后退出。【除了TIM1外,測試程序也沒有別的其它中斷使能。】 不妨看看下面兩種不同情形,TIM1溢出中斷服務程序的運行結果。 一、ISR里面不添加SIM/RIM指令時的情形。 __interrupt void TIM1_UPD_OVF_TRG_BRK_IRQHandler( void ) { TIM1_ClearFlag(TIM1_FLAG_UPDATE);//清除TIM1更新標志 GPIO_WriteHigh(GPIOC,GPIO_PIN_6 ); // PC6 HIGH // disableInterrupts(); Delay(21000); //延時約 7.8ms GPIO_WriteLow(GPIOC,PGPIO_PIN_6 _); // PC6 LOW // enableInterrupts(); Delay(21000); //延時約 7.8ms } 這種情況下,整個中斷服務程序運行過程中程序優先級沒有變化。運行過程中不存在被中斷的情況。Pc6輸出波形如下圖一。 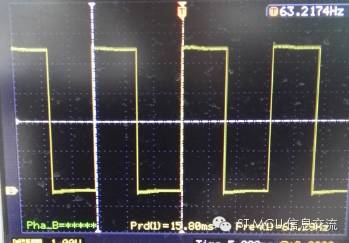 輸出波形圖一【PC6 輸出信號】 二、ISR里面添加SIM和RIM或者只放RIM指令時的情形。 __interrupt void TIM1_UPD_OVF_TRG_BRK_IRQHandler( void ) { TIM1_ClearFlag(TIM1_FLAG_UPDATE);//清除TIM1更新標志 GPIO_WriteHigh(GPIOC,GPIO_PIN_6 ); // PC6 HIGH // disableInterrupts(); Delay(21000); //延時約 7.8ms GPIO_WriteLow(GPIOC,GPIO_PIN_6 ); // PC6 LOW enableInterrupts(); Delay(21000); //延時約 7.8ms } 此時pc6波形輸出混亂無章,如下圖2。TIM1中斷程序不停的嵌套重入,導致堆棧溢出,PC跑飛。顯然跟上面的圖1相差懸殊。另外,通過示波器觀察芯片復位腳也可看到綿延不斷的復位脈沖如下圖3。 
輸出波形圖二【PC6 輸出信號】 從上面圖二不難看出是因為中斷不斷自我重入,而進中斷是先將PC6置高,所以大量的高電平呈現。

輸出波形圖三【復位腳信號】 最后的最后,估計很多工程師在編寫STM8中斷程序時,像上面的工程師那樣寫代碼。有時因此而出現些莫名其妙的異常會讓人很難找到錯誤的原因。 | 








 QQ好友和群
QQ好友和群 QQ空間
QQ空間 騰訊微博
騰訊微博 騰訊朋友
騰訊朋友 收藏
收藏 淘帖
淘帖 頂
頂 踩
踩 51hei有你更精彩!!
51hei有你更精彩!!

