
isobot機(jī)器人玩具和不同大小的舵機(jī)
 
sr403p和其他舵機(jī)
直流伺服電機(jī)(舵機(jī))
一般來(lái)講,舵機(jī)主要由以下幾個(gè)部分組成, 舵盤(pán)、減速齒輪組、位置反饋電位計(jì)5k、直流電機(jī)、控制電路板等。  普通舵機(jī)拆解圖 
SR403p 拆解圖 工作原理: 控制電路板接受來(lái)自信號(hào)線的控制信號(hào),控制電機(jī)轉(zhuǎn)動(dòng),電機(jī)帶動(dòng)一系列齒輪組,減速后傳動(dòng)至輸出舵盤(pán)。舵機(jī)的輸出軸和位置反饋電位計(jì)是相連的,舵盤(pán)轉(zhuǎn)動(dòng)的同時(shí),帶動(dòng)位置反饋電位計(jì),電位計(jì)將輸出一個(gè)電壓信號(hào)到控制電路板,進(jìn)行反饋,然后控制電路板根據(jù)所在位置決定電機(jī)的轉(zhuǎn)動(dòng)方向和速度,從而達(dá)到目標(biāo)停止。  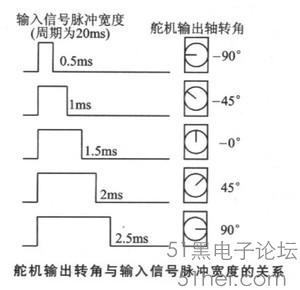
舵機(jī)的控制信號(hào)為周期是20ms的脈寬調(diào)制(PWM)信號(hào),其中脈沖寬度從0.5ms-2.5ms,相對(duì)應(yīng)舵盤(pán)的位置為0-180度,呈線性變化。也就是說(shuō),給它提供一定的脈寬,它的輸出軸就會(huì)保持在一個(gè)相對(duì)應(yīng)的角度上,無(wú)論外界轉(zhuǎn)矩怎樣改變,直到給它提供一個(gè)另外寬度的脈沖信號(hào),它才會(huì)改變輸出角度到新的對(duì)應(yīng)的位置上。舵機(jī)內(nèi)部有一個(gè)基準(zhǔn)電路,產(chǎn)生周期20ms,寬度1.5ms的基準(zhǔn)信號(hào),有一個(gè)比較器,將外加信號(hào)與基準(zhǔn)信號(hào)相比較,判斷出方向和大小,從而產(chǎn)生電機(jī)的轉(zhuǎn)動(dòng)信號(hào)。由此可見(jiàn),舵機(jī)是一種位置伺服的驅(qū)動(dòng)器,轉(zhuǎn)動(dòng)范圍不能超過(guò)180度,適用于那些需要角度不斷變化并可以保持的驅(qū)動(dòng)當(dāng)中。比方說(shuō)機(jī)器人的關(guān)節(jié)、飛機(jī)的舵面等。 舵機(jī)的輸入線共有三條,紅色中間,是電源線,一邊黑色的是地線,這輛根線給舵機(jī)提供最基本的能源保證,主要是電機(jī)的轉(zhuǎn)動(dòng)消耗。電源有兩種規(guī)格,一是4.8V,一是6.0V,分別對(duì)應(yīng)不同的轉(zhuǎn)矩標(biāo)準(zhǔn),即輸出力矩不同,6.0V對(duì)應(yīng)的要大一些,具體看應(yīng)用條件;另外一根線是控制信號(hào)線,F(xiàn)utaba的一般為白色,JR的一般為桔黃色。另外要注意一點(diǎn),SANWA的某些型號(hào)的舵機(jī)引線電源線在邊上而不是中間,需要辨認(rèn)。但記住紅色為電源,黑色為地線,一般不會(huì)搞錯(cuò)。 廠商所提供的舵機(jī)規(guī)格資料,都會(huì)包含外形尺寸(mm)、扭力(kg/cm)、速度(秒/60°)、測(cè)試電壓(V)及重量(g)等基本資料。扭力的單位是 kg/cm,意思是在擺臂長(zhǎng)度 1 公分處,能吊起幾公斤重的物體。這就是力臂的觀念,因此擺臂長(zhǎng)度愈長(zhǎng),則扭力愈小。速度的單位是 sec/60°,意思是舵機(jī)轉(zhuǎn)動(dòng) 60°所需要的時(shí)間。 電壓會(huì)直接影響舵機(jī)的性能,例如 Futaba S-9001 在 4.8V 時(shí)扭力為 3.9kg/cm、速度為 0.22 秒/60°,在 6.0V 時(shí)扭力為 5.2kg/cm、速度為 0.18 秒/60° 。若無(wú)特別注明,JR 的舵機(jī)都是以 4.8V 為測(cè)試電壓,F(xiàn)utaba則是以 6.0V 作為測(cè)試電壓。速度快、扭力大的舵機(jī),除了價(jià)格貴,還會(huì)伴隨著高耗電的特點(diǎn)。因此使用高級(jí)的舵機(jī)時(shí),務(wù)必搭配高品質(zhì)、高容量的電池,能提供穩(wěn)定且充裕的電流,才可發(fā)揮舵機(jī)應(yīng)有的性能。 數(shù)碼舵機(jī)常見(jiàn)問(wèn)題原理分析及解決:
一、數(shù)碼舵機(jī)與模擬舵機(jī)的區(qū)別
傳統(tǒng)模擬舵機(jī)和數(shù)字比例舵機(jī)(或稱之為標(biāo)準(zhǔn)舵機(jī))的電子電路中無(wú)MCU微控制器,一般都稱之為模擬舵機(jī)。老式模擬舵機(jī)由功率運(yùn)算放大器等接成惠斯登電橋,根據(jù)接收到模擬電壓控制指令和機(jī)械連動(dòng)位置傳感器(電位器)反饋電壓之間比較產(chǎn)生的差分電壓,驅(qū)動(dòng)有刷直流電機(jī)伺服電機(jī)正/反運(yùn)轉(zhuǎn)到指定位置。數(shù)字比例舵機(jī)是模擬舵機(jī)最好的類型,由直流伺服電機(jī)、直流伺服電機(jī)控制器集成電路(IC),減速齒輪組和反饋電位器組成,它由直流伺服電機(jī)控制芯片直接接收PWM(脈沖方波,一般周期為20ms,脈寬1~2 ms,脈寬1 ms為上限位置,1.5ms為中位,2ms為下限位置)形式的控制驅(qū)動(dòng)信號(hào),迅速驅(qū)動(dòng)電機(jī)執(zhí)行位置輸出,直至直流伺服電機(jī)控制芯片檢測(cè)到位置輸出連動(dòng)電位器送來(lái)的反饋電壓與PWM控制驅(qū)動(dòng)信號(hào)的平均有效電壓相等,停止電機(jī),完成位置輸出。
數(shù)碼舵機(jī)電子電路中帶MCU微控制器故俗稱為數(shù)碼舵機(jī),數(shù)碼舵機(jī)憑借比之模擬舵機(jī)具有反應(yīng)速度更快,無(wú)反應(yīng)區(qū)范圍小,定位精度高,抗干擾能力強(qiáng)等優(yōu)勢(shì)已逐漸取代模擬舵機(jī)在機(jī)器人、航模中得到廣泛應(yīng)用。
數(shù)碼舵機(jī)設(shè)計(jì)方案一般有兩種:一種是MCU+直流伺服電機(jī)+直流伺服電機(jī)控制器集成電路(IC)+減速齒輪組+反饋電位器的方案,以下稱為方案1,另一種是MCU+直流伺服電機(jī)+減速齒輪組+反饋電位器的方案,以下稱為方案2。市面上加裝數(shù)碼驅(qū)動(dòng)板把模擬舵機(jī)改數(shù)碼舵機(jī)屬方案1。
二、舵機(jī)電機(jī)調(diào)速原理及如何加快電機(jī)速度
常見(jiàn)舵機(jī)電機(jī)一般都為永磁直流電動(dòng)機(jī),如直流有刷空心杯電機(jī)。直流電動(dòng)機(jī)有線形的轉(zhuǎn)速-轉(zhuǎn)矩特性和轉(zhuǎn)矩-電流特性,可控性好,驅(qū)動(dòng)和控制電路簡(jiǎn)單,驅(qū)動(dòng)控制有電流控制模式和電壓控制兩種模式。舵機(jī)電機(jī)控制實(shí)行的是電壓控制模式,即轉(zhuǎn)速與所施加電壓成正比,驅(qū)動(dòng)是由四個(gè)功率開(kāi)關(guān)組成H橋電路的雙極性驅(qū)動(dòng)方式,運(yùn)用脈沖寬度調(diào)制(PWM)技術(shù)調(diào)節(jié)供給直流電動(dòng)機(jī)的電壓大小和極性,實(shí)現(xiàn)對(duì)電動(dòng)機(jī)的速度和旋轉(zhuǎn)方向(正/反轉(zhuǎn))的控制。電機(jī)的速度取決于施加到在電機(jī)平均電壓大小,即取決于PWM驅(qū)動(dòng)波形占空比(占空比為脈寬/周期的百分比)的大小,加大占空比,電機(jī)加速,減少占空比電機(jī)減速。
所以要加快電機(jī)速度:1、加大電機(jī)工作電壓;2、降低電機(jī)主回路阻值,加大電流;二者在舵機(jī)設(shè)計(jì)中要實(shí)現(xiàn),均涉及在滿足負(fù)載轉(zhuǎn)矩要求情況下重新選擇舵機(jī)電機(jī)。
三、數(shù)碼舵機(jī)的反應(yīng)速度為何比模擬舵機(jī)快
很多模友錯(cuò)誤以為:“數(shù)碼舵機(jī)的PWM驅(qū)動(dòng)頻率300Hz比模擬舵機(jī)的50Hz高6倍,則舵機(jī)電機(jī)轉(zhuǎn)速快6倍,所以數(shù)碼舵機(jī)的反應(yīng)速度就比模擬舵機(jī)快6倍” 。這里請(qǐng)大家注意占空比的概念,脈寬為每周期有效電平時(shí)間,占空比為脈寬/周期的百分比,所以大小與頻率無(wú)關(guān)。占空比決定施加在電機(jī)上的電壓,在負(fù)載轉(zhuǎn)矩不變時(shí),就決定電機(jī)轉(zhuǎn)速,與PWM的頻率無(wú)關(guān)。
模擬舵機(jī)是直流伺服電機(jī)控制器芯片一般只能接收50Hz頻率(周期20ms)~300Hz左右的PWM外部控制信號(hào),太高的頻率就無(wú)法正常工作了。若PWM外部控制信號(hào)為50Hz,則直流伺服電機(jī)控制器芯片獲得位置信息的分辨時(shí)間就是20ms,比較PWM控制信號(hào)正比的電壓與反饋電位器電壓得出差值,該差值經(jīng)脈寬擴(kuò)展(占空比改變,改變大小正比于差值)后驅(qū)動(dòng)電機(jī)動(dòng)作,也就是說(shuō)由于受PWM外部控制信號(hào)頻率限制,最快20ms才能對(duì)舵機(jī)搖臂位置做新的調(diào)整。
數(shù)碼舵機(jī)通過(guò)MCU可以接收比50Hz頻率(周期20ms)快得多的PWM外部控制信號(hào),就可在更短的時(shí)間分辨出PWM外部控制信號(hào)的位置信息,計(jì)算出PWM信號(hào)占空比正比的電壓與反饋電位器電壓的差值,去驅(qū)動(dòng)電機(jī)動(dòng)作,做舵機(jī)搖臂位置最新調(diào)整。
結(jié)論:不管是模擬還是數(shù)碼舵機(jī),在負(fù)載轉(zhuǎn)矩不變時(shí),電機(jī)轉(zhuǎn)速取決于驅(qū)動(dòng)信號(hào)占空比大小而與頻率無(wú)關(guān)。數(shù)碼舵機(jī)可接收更高頻率的PWM外部控制信號(hào),可在更短的周期時(shí)間后獲得位置信息,對(duì)舵機(jī)搖臂位置做最新調(diào)整。所以說(shuō)數(shù)碼舵機(jī)的反應(yīng)速度比模擬舵機(jī)快,而不是驅(qū)動(dòng)電機(jī)轉(zhuǎn)速比模擬舵機(jī)快。
四、數(shù)碼舵機(jī)的無(wú)反應(yīng)區(qū)范圍為何比模擬舵機(jī)小
根據(jù)上述對(duì)模擬舵機(jī)的分析可知模擬舵機(jī)約20ms才能做一次新調(diào)整。而數(shù)碼舵機(jī)以更高頻率的PWM驅(qū)動(dòng)電機(jī)。PWM頻率的加快使電機(jī)的啟動(dòng)/停止,加/減速更柔和,更平滑,更有效的為電機(jī)提供啟動(dòng)所需的轉(zhuǎn)矩。就象是汽車(chē)獲得了更小的油門(mén)控制區(qū)間,則啟動(dòng)/停止,加/減速性能更好。所以數(shù)碼舵機(jī)的無(wú)反應(yīng)區(qū)比模擬舵機(jī)小。
五、模擬舵機(jī)加裝數(shù)碼舵機(jī)驅(qū)動(dòng)板并未提升反應(yīng)速度
根據(jù)以上分析可知,模擬舵機(jī)加裝數(shù)碼舵機(jī)驅(qū)動(dòng)板,要提升反應(yīng)速度,PMW外部控制信號(hào)(如陀螺儀送來(lái)的尾舵機(jī)信號(hào))的頻率必須加快,如果還是50Hz,那舵機(jī)反應(yīng)速度當(dāng)然就沒(méi)提升了。
六、舵機(jī)控制死區(qū)、滯環(huán)、定位精度、輸入信號(hào)分辨率、回中性能的認(rèn)識(shí)
每一個(gè)閉環(huán)控制系統(tǒng)由于信號(hào)的振蕩等原因,輸入信號(hào)和反饋信號(hào)不可能完全相等,這就涉及到控制死區(qū)和滯環(huán)的問(wèn)題,系統(tǒng)無(wú)法辨別輸入信號(hào)和反饋信號(hào)的差異范圍就是控制死區(qū)范圍。舵機(jī)自動(dòng)控制系統(tǒng)由于信號(hào)震蕩、機(jī)械精度等原因造成控制系統(tǒng)在控制死區(qū)范圍外的小范圍老是做調(diào)整,為使舵機(jī)在小范圍內(nèi)不對(duì)震蕩做調(diào)整,這就需要引入滯環(huán)的作用了。滯環(huán)比控制死區(qū)大,一般控制死區(qū)范圍為±0.4%,滯環(huán)可設(shè)置為±2%,輸入信號(hào)和反饋信號(hào)的差值在滯環(huán)內(nèi)電機(jī)不動(dòng)作,輸入信號(hào)和反饋信號(hào)的差值進(jìn)入滯環(huán),電機(jī)開(kāi)始制動(dòng)-停止。定位精度取決于舵機(jī)系統(tǒng)的整體精度:如控制死區(qū)、機(jī)械精度、反饋電位器精度、輸入信號(hào)分辨率。輸入信號(hào)分辨率指舵機(jī)系統(tǒng)對(duì)輸入信號(hào)最小分辨范圍,數(shù)碼舵機(jī)輸入信號(hào)分辨率大大優(yōu)于模擬舵機(jī)。回中性能取決于滯環(huán)和定位精度。
七、舵機(jī)為何會(huì)老發(fā)出吱吱的響聲
舵機(jī)老發(fā)出吱吱的來(lái)回定位調(diào)整響聲,是由于有的舵機(jī)無(wú)滯環(huán)調(diào)節(jié)功能,控制死區(qū)范圍調(diào)得小,只要輸入信號(hào)和反饋信號(hào)老是波動(dòng),它們的差值超出控制死區(qū),舵機(jī)就發(fā)出信號(hào)驅(qū)動(dòng)電機(jī)。另沒(méi)有滯環(huán)調(diào)節(jié)功能,如果舵機(jī)齒輪組機(jī)械精度差,齒虛位大,帶動(dòng)反饋電位器的旋轉(zhuǎn)步,步范圍就已超出控制死區(qū)范圍,那舵機(jī)必將調(diào)整不停,吱吱不停。
八、為何有的舵機(jī)炸機(jī)易燒電路板
有的舵機(jī)選用的功率器件電流大同時(shí)系統(tǒng)中設(shè)計(jì)有或芯片自帶有過(guò)流保護(hù)功能,能檢測(cè)出堵轉(zhuǎn)過(guò)流及短路狀態(tài)迅速停止電機(jī)驅(qū)動(dòng)信號(hào)。還有可在電機(jī)回路接壓敏電阻防止瞬間過(guò)壓及在功率器件前端設(shè)計(jì)有吸收電容。此類舵機(jī)炸機(jī)堵轉(zhuǎn)不容易燒電路板和電機(jī)。與舵機(jī)是金屬齒還是塑料齒并無(wú)絕對(duì)關(guān)系。
九、舵機(jī)為何抖舵
控制死區(qū)敏感,輸入信號(hào)和反饋信號(hào)因各種原因波動(dòng),差值超出范圍,舵臂動(dòng),所以抖舵。
十一、舵機(jī)為何抖舵
控制死區(qū)敏感,輸入信號(hào)和反饋信號(hào)因各種原因波動(dòng),差值超出范圍,舵臂動(dòng),所以抖舵。
舵機(jī)一般故障判斷: 1)炸機(jī)后舵機(jī)電機(jī)狂轉(zhuǎn)、舵盤(pán)搖臂不受控制、搖臂打滑------------------可以斷定:齒輪掃齒了,換齒輪。 2)炸機(jī)后舵機(jī)一致性銳減,現(xiàn)象是炸壞的舵機(jī)反應(yīng)遲鈍,發(fā)熱嚴(yán)重,但是可以隨著控的指令運(yùn)行,但是舵量很小很慢-------------基本斷定:舵機(jī)電機(jī)過(guò)流了,拆下電機(jī)后發(fā)現(xiàn)電機(jī)空載電流很大(>150MA),失去完好的性能(完好電機(jī)空載電流≤60-90MA),換舵機(jī)電機(jī)。 3)炸機(jī)后舵機(jī)打舵后無(wú)任何反應(yīng)---------------基本確定舵機(jī)電子回路斷路、接觸不良或舵機(jī)的電機(jī)、電路板的驅(qū)動(dòng)部分燒毀導(dǎo)致的,先檢查線路,包括插頭,電機(jī)引線和舵機(jī)引線是否有斷路現(xiàn)象,如果沒(méi)有的話,就進(jìn)行逐一排除,先將電機(jī)卸下測(cè)試空載電流,如果空載電流小于90MA,則說(shuō)明電機(jī)是好的,那問(wèn)題絕對(duì)是舵機(jī)驅(qū)動(dòng)燒壞了,9-13克微型舵機(jī)電路板上面就有2個(gè)或四個(gè)小貼片三極管,換掉就可以了,有2個(gè)三極管的那肯定是用Y2或IY直接代換,也就是SS8550,如果是有四個(gè)三極管的H橋電路,則直接用2個(gè)Y1(SS8050)和2個(gè)(SS8550)直接代換,65MG的UYR ---- 用Y 1(SS8050 IC=1.5A); UXR------用Y2(SS8550,IC=1.5A)直接代換。 4)舵機(jī)故障是搖臂只能一邊轉(zhuǎn)動(dòng),另外一邊不動(dòng)的話-----------判斷:舵機(jī)電機(jī)是好的,主要檢查驅(qū)動(dòng)部分,有可能燒了一邊的驅(qū)動(dòng)三極管,按照(3)維修即可。 5)維修好舵機(jī)后通電,發(fā)現(xiàn)舵機(jī)向一個(gè)方向轉(zhuǎn)動(dòng)后就卡住不動(dòng)了,舵機(jī)吱吱地響--------------說(shuō)明舵機(jī)電機(jī)的正負(fù)極或電位器的端線接錯(cuò)了,電機(jī)的兩個(gè)接線倒個(gè)方向就可以了。 6)嶄新的舵機(jī)買(mǎi)回來(lái)后,通電發(fā)現(xiàn)舵機(jī)狂抖,但用一下控的搖臂后,舵機(jī)一切正常----------說(shuō)明舵機(jī)在出廠的時(shí)候裝配不當(dāng)或齒輪精度不夠,這個(gè)故障一般發(fā)生在金屬舵機(jī)上面,如果不想退貨或者更換的話,自行解決的方法:卸下舵機(jī)后蓋,將舵機(jī)電機(jī)與舵機(jī)減速齒輪分離后,在齒輪之間擠點(diǎn)牙膏,上好舵機(jī)齒輪頂蓋,上好減速箱螺絲后,安上舵機(jī)搖臂,用手反復(fù)旋轉(zhuǎn)搖臂碾磨金屬舵機(jī)齒輪,直至齒輪運(yùn)轉(zhuǎn)順滑、齒輪摩擦噪音減小后,將舵機(jī)齒輪卸下汽油清洗后,裝齒輪上硅油組裝好舵機(jī),即可解決舵機(jī)故障。 7)有一種故障舵機(jī)表現(xiàn)很古怪:搖動(dòng)控的遙感,舵機(jī)有正常的反應(yīng),但是固定控的遙感某一位置后,故障舵機(jī)搖臂還在慢慢的運(yùn)行,或者搖臂動(dòng)作拖泥帶水,并來(lái)回動(dòng)作------------------經(jīng)過(guò)多次維修后發(fā)現(xiàn)問(wèn)題所在:應(yīng)該緊密卡在舵機(jī)末級(jí)齒輪中電位器的金屬轉(zhuǎn)柄,與舵機(jī)搖臂大齒輪(末級(jí))結(jié)合不緊,甚至發(fā)生打滑現(xiàn)象,導(dǎo)致舵機(jī)無(wú)法正確尋找控發(fā)出的位置指令,反饋不準(zhǔn),不停尋找導(dǎo)致的,解決了電位器與搖臂齒輪的緊密結(jié)合后,故障可以排除。按照改方法檢修后故障仍舊存在的話,也有可能是舵機(jī)電機(jī)的問(wèn)題或電位器的問(wèn)題,需要綜合分析逐一排查! 8)故障舵機(jī)不停的抖舵,排除無(wú)線電干擾,動(dòng)控?fù)u臂仍舊抖動(dòng)的話----------電位器老化,換之,或直接報(bào)廢掉,當(dāng)配件! 9)數(shù)碼斜盤(pán)舵機(jī)裝機(jī)過(guò)后發(fā)現(xiàn)舵機(jī)運(yùn)行不正常,快慢不一,退回廠家,后來(lái)?yè)Q回3個(gè)后還是一致性差,最后才知道是什么原因-----有些數(shù)碼舵機(jī)對(duì)BEC要求,加裝5.V3A 外置 BEC后,故障排除,與舵機(jī)質(zhì)量無(wú)關(guān)。 舵機(jī)選購(gòu): 市場(chǎng)上的舵機(jī)有塑料齒、金屬齒、小尺寸、標(biāo)準(zhǔn)尺寸、大尺寸,另外還有薄的標(biāo)準(zhǔn)尺寸舵機(jī),及低重心的型號(hào)。小舵機(jī)一般稱為微型舵機(jī),扭力都比較小,市面上2.5g,3.7g,4.4g,7g,9g等舵機(jī)指的是舵機(jī)的重量分別是多少克,體積和扭力也是逐漸增大。微型舵機(jī)內(nèi)部多數(shù)都是塑料齒,9g舵機(jī)有金屬齒的型號(hào),扭力也比塑料齒的要大些。futaba S3003,輝盛 MG995是標(biāo)準(zhǔn)舵機(jī),體積差不多,但前者是塑料齒,后者金屬齒,兩者標(biāo)稱的扭力也差很多。春天sr403p,Dynamixel AX-12+是機(jī)器人專用舵機(jī),不同的是前者是國(guó)產(chǎn),后者是韓國(guó)產(chǎn),兩者都是金屬齒標(biāo)稱扭力13kg以上,但前者只是改改樣子的模擬舵機(jī),后者則是RS485串口通信,具有位置反饋,而且還具有速度反饋與溫度反饋功能的數(shù)字舵機(jī),兩者在性能和價(jià)格上相差很大。 除了體積,外形和扭力的不同選擇,舵機(jī)的反應(yīng)速度和虛位也要考慮,一般舵機(jī)的標(biāo)稱反應(yīng)速度常見(jiàn)0.22 秒/60°,0.18 秒/60°,好些的舵機(jī)有0.12 秒/60°等的,數(shù)值小反應(yīng)就快。 舵機(jī)虛位產(chǎn)生和舵機(jī)的扭力和制造工藝有關(guān),扭力大相應(yīng)的負(fù)載范圍也大,虛位就相應(yīng)小,普通舵機(jī)新的時(shí)候虛位一般比較小,也就是半個(gè)齒的角度,這個(gè)應(yīng)該是機(jī)械加工的精度問(wèn)題,好的舵機(jī)就比較小。但使用了一段時(shí)間以后,尤其是大扭距的舵機(jī),虛位就越來(lái)越大了,這個(gè)應(yīng)該不是齒輪磨損造成的,解剖了幾個(gè)舵機(jī),發(fā)現(xiàn)都是舵機(jī)蓋的塑料材質(zhì)不夠硬,齒輪的的軸都是直接裝在這個(gè)塑料蓋上的,時(shí)間一長(zhǎng),這幾個(gè)孔都被擴(kuò)大成橢圓形了。一扳搖臂,齒輪的軸就會(huì)左右晃動(dòng),虛位就產(chǎn)生了。 現(xiàn)在市面上的舵機(jī)魚(yú)龍混雜,總體來(lái)說(shuō)仿品不如正品,便宜的不如貴的,塑料齒的不如金屬齒的,老的不如新的,國(guó)內(nèi)的不如外國(guó)的等等,大家不必過(guò)于追求極致,根據(jù)自身購(gòu)買(mǎi)力選擇夠用的就行。
| 





