|
|
這兩天看到很多關于線性矩陣不等式(Linear MatrixInequality,LMI)算法方面的東西,但是好像沒一個實際的例子可以參考,糾結了兩天做了一個單級倒立擺的例子出來,對有些人說不定還是有用的,PS:這是我畢業論文的一部分  。
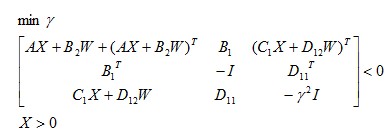
一個倒立擺系統的數學模型轉化成標準的H∞控制問題模型,即: 
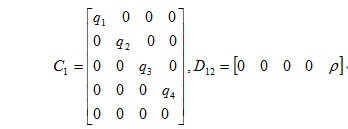 給加權矩陣C1和D12選擇一個合適的參數(通常是通過仿真反復試驗得出來),求解下面的一個LMI,使γ的值取到最小,從而得到一個最優的態反饋H∞控制器 。 。
下面是利用MATLAB LMI工具箱解決這個問題獨一無二的例子,網上沒有第二份這樣的代碼了。另外仿真還可以使用MATLAB/Simulink。。。。。
%基于LMI算法的倒立擺狀態反饋H∞控制器設計
%State Feedback H∞ controller design based lmi approach
%by 2013/04/03 hemmingway <hemmingway@163.com>
clc
clear all
%----------------------------------------------%
%定義常數矩陣
A=[0 1 0 0;
0 -0.0883 0.6293 0;
0 0 0 1;
0 -0.2357 27.8285 0] ;
B1=[0 2.3566 0 104.2027]';
B2=[0 0.8832 0 2.3566]';
C1=[0.064 0 0 0;
0 1e-3 0 0;
0 0 0.11 0;
0 0 0 0.01;
0 0 0 0];
D12=[0 0 0 0 0.01]';
D11=[0 0 0 0 0]';
C2=[1 0 0 0;
0 0 1 0];
D21=[0 0 0 0]';
D22=[0 0 0 0]';
%
setlmis([]); %建立一個LMI
X=lmivar(1,[4,1]); %定義矩陣變量
W=lmivar(2,[1,4]);
r1=lmivar(1,[1,1]);
%%%%%%%
lmiterm([1 1 1 X],A,1,'s');
lmiterm([1 1 1 W],B2,1,'s');
lmiterm([1 2 1 0],B1');
lmiterm([1 2 2 0],-1);
lmiterm([1 3 1 X],C1,1);
lmiterm([1 3 1 W],D12,1);
lmiterm([1 3 2 0],D11);
lmiterm([1 3 3 r1],-1,1);
%
lmiterm([-2 1 1 X],1,1);
lmisys=getlmis;
%%----------------------------solver---------------------------------------
n = decnbr(lmisys);
c = zeros(n,1);
for j=1:n
[r1j]=defcx(lmisys,j,r1);
c(j)=trace(r1j);
end
%c=mat2dec(lmisys,zeros(4,4),zeros(1,4),eye(1))
[copt,xopt]=mincx(lmisys,c, [0 0 0 0 0]);
X=dec2mat(lmisys,xopt,X)
W=dec2mat(lmisys,xopt,W)
K=W*X^(-1);
K=K/100 %%控制器,為什么要除以100? 因為D12矩陣哪里是0.001,不是傳統的1
r1=dec2mat(lmisys,xopt,r1);
gammar=r1^(1/2) %%gammar
%----------------------------------simu------------------------------------
%
w=0.0;
n=1;
Dt=0.01;
t=-0.8;
t0=t;
x=[-0.2 0 0.3 0]';
for i=1:1500
if t<0
%t1=4*pi*t;
t1=4*pi*t;
x=[1.1*sin(t1); 1.2*cos(t1); 0.5*sin(t1)+1.0*cos(t1); 0];
else
u=K*x; %%反饋控制
Dx=A*x+B1*w+B2*u;
x=x+Dx*Dt;
end
Y(:,n)=x;
t=t+Dt;
n=n+1;
end
figure(1)
time = (1:n-1)*Dt+t0;
xpos=Y(1,:);
xangle=Y(3,:);
subplot(2,1,1)
plot((1:n-1)*Dt+t0,xpos,'k')
axis([-0.8 10 -1.5 1.5])
grid on
xlabel('time(s)')
ylabel('Cart positon')
subplot(2,1,2)
plot((1:n-1)*Dt+t0,xangle,'k')
axis([-0.8 10 -1.5 1.5])
grid on
xlabel('time(s)')
ylabel('Pendulum')
|
評分
-
查看全部評分
|









 QQ好友和群
QQ好友和群 QQ空間
QQ空間 騰訊微博
騰訊微博 騰訊朋友
騰訊朋友 收藏
收藏 淘帖
淘帖 頂
頂 踩
踩


