|
|
��������� xiaos �� 2015-4-2 22:41 ��
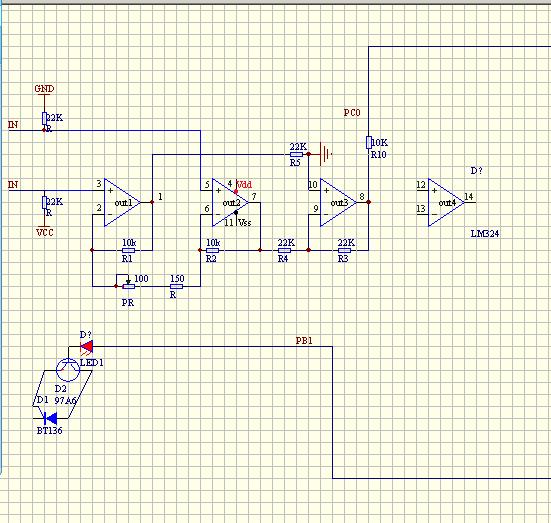
�÷Ŵ���LM324���^������^(gu��)�ض�߀�ǿ��Է�(w��n)������M8 AD10λ pwm10λ�ضȷ�����200-500
���_��1�ȡ���
��?y��n)�����ԭ�����Ҫ������������ÿ�����ص��O(sh��)��ֵǰ15�Ⱦ��_(k��i)ʼ��������
�Ђ�(g��)ȱ�c(di��n)����PID���ƺ�ؕr(sh��)���ǎȜض����ĺ�������
�O(sh��)�ò���߀�](m��i)��(xi��)��
�Լ���˼·��ֱ�����ǂ�(g��)��׃������O(sh��)��
AD�D(zhu��n)�Q�ɘӿ�׃����(l��i)�O(sh��)���ض�
�O(sh��)��һ���I��ض��O(sh��)��
��(d��ng)�����ǰ��I���׃����O(sh��)���ض���Ч
�](m��i)����Ԓ(hu��)��������ô�D(zhu��n)�������{(di��o)��(ji��)�ض�
�Dz���(xi��)�������(g��)���a���l(f��)����(l��i)���һ������
�l(f��)�X(ju��)��(w��n)�}߀�ܶ�ġ���ϣ����Ҷ�������Ҋ(ji��n)��С�ܳ��W(xu��)��
߀�����Ҫ�ĵ�Ԓ(hu��)���Բ������·����һ�l�ɘӸ����ƾ�(xi��n)����(l��i)ֱ���B��M8Ҳ���Ե�

 - /*******************************
- project :A/D�D(zhu��n)�Q��(sh��)�a���@ʾ
- chip type : atmega8
- clock frequency:��(n��i)��RC(INT) 8MHz
- Author :���h(yu��n)��
- ********************************/
- #include "iom8v.h"
- #include "macros.h"
- #define osccal 0x7d
- unsigned long adc_rel; //̎���������D(zhu��n)�Q�Y(ji��)��
- unsigned long adc_rl; //A/D�D(zhu��n)�Q�Y(ji��)
- unsigned int tmp; //�O(sh��)�õĜضȅ���(sh��)
- unsigned char adc_mux; //A/Dͨ��
- unsigned char led_buff[3]={0,0,0}; //�@ʾ����
- signed int error0; //��(d��ng)ǰƫ��
- signed int error1; //�ϴ�ƫ��
- signed int error2; //���ϴ�ƫ��
- signed char Kp; //��������(sh��)
- signed char Ki; //�e�ֳ���(sh��)
- signed char Kd; //�ֳ���(sh��)
- signed int kk1; //��(d��ng)ǰ����ݔ��
- signed int kk2; //�ϴο���ݔ��
- #define NB -3
- #define NM -2
- #define NS -1
- #define ZO 0
- #define PS 1
- #define PM 2
- #define PB 3
- #pragma data:code
- //�O(sh��)�Ô�(sh��)��(j��)�^(q��)λ����(ch��)����
- const unsigned char seg_table[16]={0x40,0x79,0x24,0x30,0x19,0x90,0x80,0x78,0x00,0x10,0x08,0x81,0x44,0x21,0x04,0x8c};
- const unsigned char KP_table[49]={PB,PB,PM,PM,PS,ZO,ZO,PB,PB,PM,PS,PS,ZO,NS,PM,PM,PM,PS,ZO,NS,NS,PM,PM,PS,ZO,NS,NM,NM,PS,PS,ZO,NS,NS,NM,NM,PS,ZO,NS,NM,NM,NM,NB,ZO,ZO,NM,NM,NM,NB,NB};
- const unsigned char KI_table[49]={NB,NB,NM,NM,NS,ZO,ZO,NB,NB,NM,NS,NS,ZO,ZO,NB,NM,NS,NS,ZO,PS,PS,NM,NM,NS,ZO,PS,PM,PM,NM,NS,ZO,PS,PS,PM,PB,ZO,ZO,PS,PS,PM,PB,PB,ZO,ZO,PS,PM,PM,PB,PB};
- const unsigned char KD_table[49]={PS,NS,NB,NB,NB,NM,NS,PS,NS,NB,NM,NM,NS,ZO,ZO,NS,NM,NM,NS,NS,ZO,ZO,NS,NS,NS,NS,NS,ZO,ZO,ZO,ZO,ZO,ZO,ZO,ZO,PB,NS,PS,PS,PS,PS,PB,PB,PM,PM,PM,PS,PS,PB};
- #pragma data:data
- //�O(sh��)�Ô�(sh��)��(j��)�^(q��)�ص���(sh��)��(j��)��(ch��)����
- /*********************************************************
- �ӕr(sh��)����(sh��)
- *********************************************************/
- void delay_us(int time) //�뼉(j��)�ӕr(sh��)
- {
- do
- time--;
- while (time>1);
- }
- void delay_ms(unsigned int time) //���뼉(j��)�ӕr(sh��)
- {
- while (time!=0)
- {
- delay_us(1000);
- time--;
- }
- }
- /************************************************************
- �Д��@ʾ��ʼ��
- TIMER2 initialize - prescale:1024
- WGM: Normal
- desired value: 10mSec
- actual value: 9.984mSec (0.2%)
- *************************************************************/
- void timer2_init(void)
- {
- TCCR2 = 0x00; //stop
- ASSR = 0x00; //set async mode
- TCNT2 = 0xB2; //setup
- OCR2 = 0x4E;
- TCCR2 = 0x07; //start
- DDRB=0xff; //PC�ڞ�����1ݔ��
- PORTB=0xff; //PC�ڃ�(n��i)������
- DDRD|=0xf1;
- PORTD&=0x1f; //�P(gu��n)�]LED
- }
- /***********************************************
- �Д��@ʾ
- *************************************************/
- #pragma interrupt_handler timer2_ovf_isr:5
- void timer2_ovf_isr(void)
- {
- unsigned char i;
- static unsigned k;
- SEI();
- TCNT2 = 0xB2; //reload counter value
- for(i=0;i<3;i++)
- {
- PORTB=led_buff[i];
- PORTD|=(1<<(i+5));//���@ʾ��λ��1
- delay_ms(1);
- PORTD&=0x1f; //�P(gu��n)�]LED
- }
- }
- /************************************************************
- PWM��ʼ����OC1A��ݔ��
- *************************************************************/
- void timer1_init(void)
- {
- TCCR1B = 0x00; //stop
- TCNT1H = 0x00; //setup
- OCR1A = 200;
- TCCR1A = (1<<WGM11)|(1<<WGM10)|(1<<COM1A1);//ݔ�����ƽ
- TCCR1B = (1<<CS11)|(1<<CS10); //
- }
- /*****************************************************
- PID��ʼ��
- ******************************************************/
- void pidcalc_init(void)
- {
- Kp=3;
- Ki=3;
- Kd=3;
- kk1=0; //��(d��ng)ǰ
- kk2=100;
- error0=0;
- error1=0;
- error2=0;
- tmp=300;
- }
- void pidcalc_zizheng(void)
- {
- if (tmp>adc_rel)
- {
- if (kk2<500) kk2+=3;
- else kk2=500;
- }
- if ((tmp-1)>adc_rel)
- {
- if (kk2<500) kk2+=3;
- else kk2=500;
- }
- /*if ((tmp-2)>adc_rel)
- {
- if (kk2<600) kk2+=3;
- else kk2=600;
- }*/
- if (tmp<adc_rel)
- {
- if (kk2>10) kk2-=3;
- else kk2=10;
- }
- if ((tmp+1)<adc_rel)
- {
- if (kk2>10) kk2-=3;
- else kk2=10;
- }
- /*if ((tmp+2)<adc_rel)
- {
- if (kk2>10) kk2-=3;
- else kk2=10;
- }
- /*if (tmp>adc_rel)
- {
- if (Ki<200) Ki+=4;
- else Ki=400;
- }
- if (tmp<adc_rel)
- {
- if (Ki>0) Ki-=4;
- else Ki=0;
- } */
- }
- /*******************************************************
- PID����(sh��)
- ********************************************************/
- void pidcalc(void)
- {
- signed long KPP;
- signed long KII;
- signed long KDD;
- signed int i;
- signed char j;
- error0=tmp-adc_rel;
- j=error0-error1;
- i=7*(3+error0)+(3+j);
- if(i<49)
- {
- if (i>0)
- {
- Kp=KP_table[i];
- Ki=KI_table[i];
- Kd=KD_table[i];
- }
- } //ݔ��
- if ((tmp-15)<adc_rel) //���O(sh��)����һ��ֵ�r(sh��)�_(k��i)ʼPID
- {
- if((tmp+5)>adc_rel) //���O(sh��)���ߕr(sh��)�P(gu��n)PID
- {
- KPP=Kp*(error0-error1); //����
- KII=error0*Ki; //�e��
- KDD=Kd*(error0-(2*error1)+error2); //��
- kk1=(KPP+KII+KDD)*4+kk2;
- if(kk1<0x3ef)
- {
- if (kk1>=10) OCR1A=kk1;
- else OCR1A=0;
- }
- else
- {
- OCR1A=0x3ff;
- }
- /*if((tmp-2)>adc_rel)
- {
- if(OCR1A<500) OCR1A+=20;
- else OCR1A=500;
- }*/
- }
- else
- {
- //if (tmp<adc_rel)
- // {
- /// if (OCR1A>50) OCR1A-=20;
- // else OCR1A=50;
- OCR1A=0;
- // }
- }
- }
- else
- {
- OCR1A=0x3ff;
- }
- error2=error1;
- error1=error0;
- }
- /***********************************************
- ADC��ʼ��
- ************************************************/
- void adc_init(void)
- {
- DDRC=0x00;
- PORTC=0X00;
- ADCSRA=0X00;
- ADMUX=(1<<REFS1)|(1<<REFS0)|(adc_mux&0x0f); //�x���(n��i)��2.56V�����(zh��n)AREF��ӞV�����
- ACSR=(1<<ACD); //�P(gu��n)�]ģ�M���^��
- ADCSRA=(1<<ADEN)|(1<<ADSC)|(1<<ADIE)|(1<<ADPS2)|(1<<ADPS1)|(1<<ADPS0);//128���l
- }
- /*********************************************
-
- ADC�Д�̎������(sh��)
-
- **********************************************/
- #pragma interrupt_handler adc_isr:15
- void adc_isr(void)
- {
- static unsigned i;
- adc_rl+=ADC&0x3ff;
- ADMUX=(1<<REFS1)|(1<<REFS0)|(adc_mux&0x0f); //�x���(n��i)��2.56V���(zh��n)
- ADCSRA|=(1<<ADSC); //����(d��ng)AD�D(zhu��n)�Q
- if (i<2048)
- i++;
- else
- {
- adc_rel=adc_rl/2048;
- adc_rel=adc_rel*3/5;
- i=0;
- adc_rl=0;
- }
- }
- /******************************************************
-
- ADC��(sh��)��(j��)�D(zhu��n)���sBCD
-
- ******************************************************/
- void ADCtoBCD(unsigned int temp)
- {
- unsigned char i;
- for (i=0;i<3;i++)
- {
- led_buff[i]=seg_table[temp%10];/*temp%10������(sh��)�����O(sh��)һ��(g��)��(sh��)��234��ô234/10=23��4Ҳ���Dz���4�Ķδa*/
-
- temp=temp/10;// 234/10=23��?y��n)鲻̎��С�?sh��)��(sh��)�H�͵���������
- }
-
- }
- /***************************************************************
- ������
- ***************************************************************/
- void main(void)
- {
- unsigned char i;
- unsigned int k;
- unsigned int adc_old;
- unsigned long adc_ol;
- unsigned int adc_o;
- DDRD=0xff;
- PORTD=0xf0;
- OSCCAL=osccal;
- TIMSK = 0x40; //timer interrupt sources
- adc_mux=0;
- adc_init();
- timer1_init();
- pidcalc_init();
- SEI();
- for(i=0;i<3;i++)
- led_buff[i]=seg_table[8];
- for(i=0;i<200;i++)
- timer2_init();
- adc_old=0;
- adc_rel=0;
- while(1)
- {
- if(adc_old!=adc_rel)//ADC�����ꮅ�͈�(zh��)�Д�(sh��)��(j��)̎��
- {
- adc_old=adc_rel;
- pidcalc();
- pidcalc_zizheng();
- if(k<5)
- {
- k++;
- adc_ol+=adc_old;
- }
- else
- {
- adc_o=adc_ol/5;
- adc_ol=0;
- k=0;
- }
- }
- ADCtoBCD(adc_o);
- }
- }
|
|

 [��(f��)��朽�]
[��(f��)��朽�]

 ����TQQ:125739409;���g(sh��)����QQȺ281945664
����TQQ:125739409;���g(sh��)����QQȺ281945664


