年前,網上買的四軸基本配件到貨了。因為要過年了,心情比較放松就沒有怎么去折騰它。好了,現在正式上手四軸飛行器的制作。為了省錢,沒有買遙控器,沒有買飛控板;所以好盈天行者40A無刷電調如何設置就是個大問題,可以說這是每個真正DIY四軸的人都會面臨的問題。操蛋的電調廠家----好盈科技的說明書上根本就沒有用單片機設置電調行程的方法和說明;wcao,這就是天朝的高科技公司!害得老子整整調試3個星期才把真正的驅動代碼寫出來。一句話,實踐出真知!真正的技術還得自己摸索。幸好有LA2016邏輯分析儀的輔助,否則,估計現在還在盲人摸象。
這里特別要感謝福建仰恩大學的小胡同學對設置電調的提示!
設想:1,最大程度省錢,充分利用自己手頭的硬件資源,能省則省,最大程度DIY;2,軟件思路:利用stm32的TIM輸出比較功能,4個GPIO輸出可控PWM方波控制4太高速無刷電機,構成控制四軸的動力系統;3,遙控主機通過操作電位器,stm32的AD通道讀出電位器AD值,然后通過NRF24l01模塊將AD值發送給飛控板接收,去控制4個GPIO輸出PWM方波的頻率,實現調頻調壓功能;4,AHRS姿態模塊通過本模塊的uart2串口與飛控板uart2通信獲取PITCH--俯仰角,ROLL--橫滾角,YAW--偏航角,這3個重要參數;這3個參數直接決定四軸能否穩定可控發行,同時也是PID線性方程的重要變量;5,飛控系統程序根據自己的硬件資源和功能需要自己編寫;同時參考網上開源思路。
雖說是玩具級飛行器,但是憑借一己之力制作起來,達到穩定發行可謂是困難重重。里面包含的技術有:無線通信技術,嵌入式系統編程,計算機通信技術,電力電子技術,數字信號處理技術,自動控制技術等等。難點:1,沒有源碼;2,真正的DIY,走一步算一步,程序自己編寫和組織;3,通信,測試問題都需要大量時間和精力;4,最大難點是程序思路和算法問題。
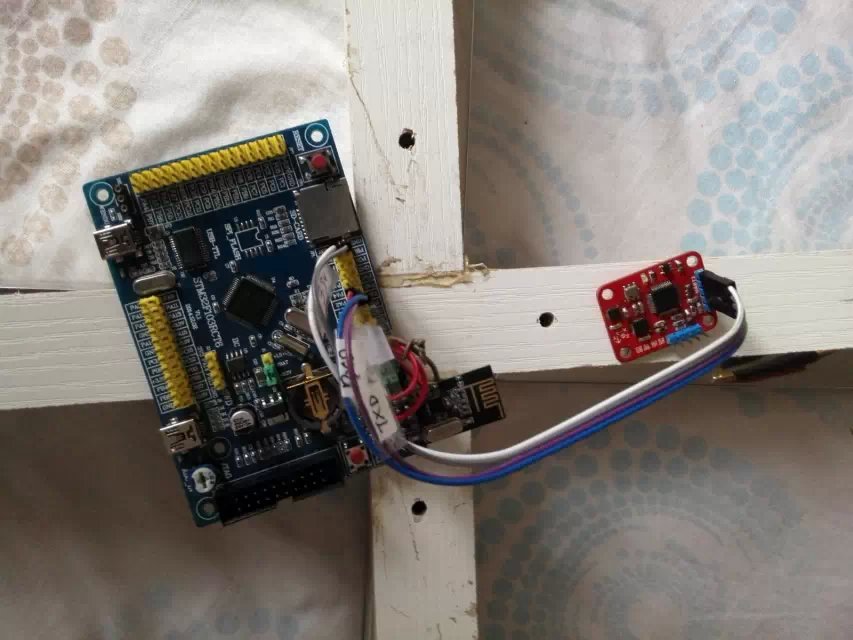
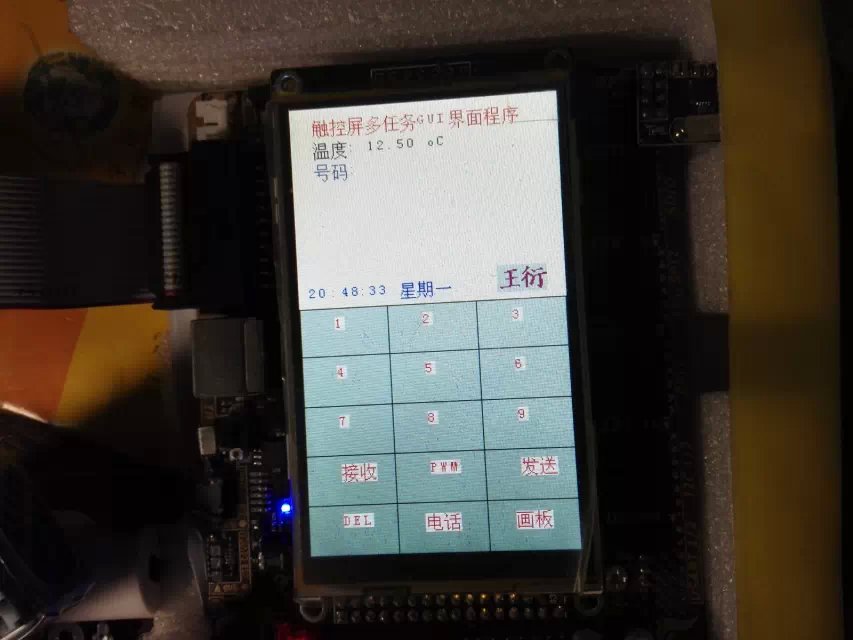
硬件:1,飛控板就用自己的stm32f103RC6最小系統板;2,遙控模塊用NRF24l01模塊,經測試控制范圍開闊地帶30m左右;遙控主機用野火mini的stm32f103VE開發板+ 4寸LCD彩屏控制界面;3,電子羅盤用的是MPU6050陀螺儀+HMC5885地磁傳感器,本模塊網購;機架,用木頭板子自制450mm機架;4,電機,4個新西達KV1000電機,電調:4個好盈40A無刷電調;1045正反槳4片;5,電池是11.1V鋰離子電池,標25C容量;6,萬向云臺輔助調試,姿態,動力調試。
本人將記錄一點點進展。



|









 QQ好友和群
QQ好友和群 QQ空間
QQ空間 騰訊微博
騰訊微博 騰訊朋友
騰訊朋友 收藏
收藏 淘帖
淘帖 頂
頂 踩
踩

