|
|
��Ƭ�C��Ϥ�ˣ���Ȼ��Ҫ�_ʼ��С܇�ˡ���(zh��n)�乤����(d��ng)Ȼ���Ԍ������I��һ��3݆��С܇�ױP32Ԫ��L298N�p늙C�����·��22Ԫ��߀��һЩ�������~����늳غеȣ����Ǻܱ��˵Ė|�����t��ֻ��1�l��(sh��)��(j��)����ʮ�ֺ��Σ��͏ļt���b���_ʼ���Ѽt������̸�һ�£��ͳ��˼t���b�صij����ˡ��@����2��С�������ҷ���܇�ӵ���6�K�X����С�壨�䌍���ǰ�IO���������ӂ�����P0�]��������裬���Բ����B늙C���ư壬����P1�ͺ��ˡ�߀�Ќ���Ƭ�C���̲��죬main()����(sh��)��һ��Ҫ��һ��while(1){}����ѭ�h(hu��n)����Ȼ�����R�ϾͽY(ji��)���ˣ��ܲ��ǰ�:) �����@��Ҫ�f��һ�µ��Ǽt�����̖�����B�m(x��)�ģ������ǰ�һ�¾͈�(zh��)��ij��������Ҫֹͣ߀�ð�ֹͣ���I��������X�Ϝyԇ���yԇ�ú�4�����늳��b��늳غУ�ͬ�r�o51��Ƭ�C��늙C���ư幩늣��㶨���_܇?y��n)��?div align="center">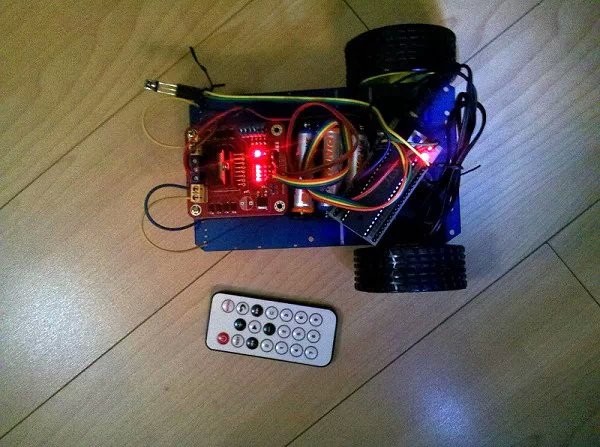
51��Ƭ�C������a
/*
IN1 > P10
IN2 > P11
IN3 > P12
IN4 > P13
*/
/*�A(y��)̎������*/
#include<reg52.h> //������Ƭ�C�Ĵ������^�ļ�
#include<intrins.h> //����_nop_()����(sh��)���x���^�ļ�
#define uchar unsigned char
#define uint unsigned int
#define motor P1
/* ����(sh��)���� -----------------------------------------------*/
void delay(uchar x);
/* ׃�����x -----------------------------------------------*/
sbit IRIN=P3^2; //�t�┵(sh��)��(j��)��
uchar IRCOM[7];
/*
********************************************************************************
** ����(sh��)���Q �� main(void)
** ����(sh��)���� �� ������(sh��)
********************************************************************************
*/
main()
{
IRIN=1; //I/O�ڳ�ʼ��
EA=1;
EX0=1;//�Д�0
motor=0xff;
while(1){
}
}
/*
********************************************************************************
** ����(sh��)���Q �� delay(uchar x)
** ����(sh��)���� �� �ӕr����(sh��)
********************************************************************************
*/
void delay(uchar x) //x*0.14MS
{
uchar i;
while(x--)
{
for(i=0;i<13;i++);
}
}
/*********************************************************/
/*
********************************************************************************
** ����(sh��)���Q �� IR_IN() interrupt 0 using 0
** ����(sh��)���� �� ��̖�ⲿ�Дຯ��(sh��)����
********************************************************************************
*/
void IR_IN() interrupt 0 using 0
{
uchar j,k,N=0;
EX0=0;
delay(15);
if(IRIN==1)
{
EX0=1;
return;
}
//�_�J(r��n)IR��̖���F(xi��n)
while(!IRIN) //��IR׃?y��u)���ƽ�����^9ms��ǰ��(d��o)���ƽ��̖��
{
delay(1);
}
for(j=0;j<4;j++) //�ռ��ĽM��(sh��)��(j��)
{
for (k=0;k<8;k++)
{
while (IRIN)
{
delay(1);
}
while (!IRIN)
{
delay(1);
}
while(IRIN)
{
delay(1);
N++;
if(N>=30)
{
EX0=1;
return;
}
}
IRCOM[j]=IRCOM[j] >> 1;
if(N>=8)
{
IRCOM[j]=IRCOM[j] | 0x80;
}
N=0;
}
}
if (IRCOM[2]!=~IRCOM[3])
{
EX0=1;
return;
}
IRCOM[5]=IRCOM[2] & 0x0F; //ȡ�I�a�ĵ���λ
IRCOM[6]=IRCOM[2] >> 4; //����4�Σ�����λ׃?y��u)�����?br />
if(IRCOM[5]>9)
{
IRCOM[5]=IRCOM[5]+0x37;
}
else
IRCOM[5]=IRCOM[5]+0x30;
if(IRCOM[6]>9)
{
IRCOM[6]=IRCOM[6]+0x37;
}
else
IRCOM[6]=IRCOM[6]+0x30;
/*******************�b����̖�����x��^(q��)*******************/
if(IRCOM[2]==0x40){//��+���I
motor=0xf5;
}else if(IRCOM[2]==0x19){ //'-'
motor=0xfa;
}else if(IRCOM[2]==0x7){ //'<<'
motor=0xf7;
}else if(IRCOM[2]==0x9){ //'>>'
motor=0xfd;
}else if(IRCOM[2]==0x16){ //'0'
motor=0xfe;
}else if(IRCOM[2]==0x0d){ //'c'
motor=0xfb;
}else if(IRCOM[2]==0x45){ //'off'
motor=0xff;
}
EX0=1; //�˳��ⲿ�Д�
}
|
|





 ����TQQ:125739409;���g(sh��)����QQȺ281945664
����TQQ:125739409;���g(sh��)����QQȺ281945664





 QQ���Ѻ�Ⱥ
QQ���Ѻ�Ⱥ QQ���g
QQ���g �vӍ��
�vӍ�� �vӍ����
�vӍ���� �ղ�
�ղ� ����
���� �
� ��
��

