|
ADAS系統(tǒng)無人駕駛的眼睛--毫米波雷達(dá) 汽車已經(jīng)進(jìn)入無人駕駛探索階段,可以主動防護(hù)汽車駕駛安全的高級駕駛輔助系統(tǒng)(以下簡稱:ADAS)技術(shù)也正在逐步的完善。
ADAS簡單來說就是讓汽車有感知系統(tǒng),可感受環(huán)境的變化并隨時做出響應(yīng)。如何完成這種感知呢?
這就需要ADAS利用車上的各種傳感器來收集汽車在行駛時周圍的環(huán)境狀態(tài),比如靜態(tài)、動態(tài)物體的識別等,收集之后再進(jìn)行系統(tǒng)的運(yùn)算和分析,讓駕駛者可以準(zhǔn)確的預(yù)判即將發(fā)生的危險,從而保證駕駛安全。
ADAS傳感器種類很多,有攝像頭、超聲波傳感器、激光雷達(dá)、毫米波雷達(dá)等。前面3種均很容易受惡劣天氣(雨霧等)的影響而導(dǎo)致性能降低,甚至失效,或多或少都存在“致命”的缺陷!
但是毫米波雷達(dá)就不一樣,它憑借可穿透塵霧、雨雪,不受惡劣天氣影響等優(yōu)點(diǎn),且能夠“24小時全天時”工作,成為了汽車ADAS不可或缺的核心傳感器之一。
1:什么是毫米波?它和其他波的區(qū)別?
1)工作在毫米波波段(millimeter wave )探測的雷達(dá)。工作頻段一般為30GHz ~ 300 GHz, 波長 1~10mm,介于微波和厘米波之間,兼具有微波雷達(dá)和光電雷達(dá)的一些優(yōu)點(diǎn);
2)毫米波雷達(dá)具有體積小、易集成和空間分辨率高的特點(diǎn)。
3)車載毫米波雷達(dá)的工作頻率為一般為 24GHz 和77GHz ;

根據(jù)波的傳播理論,頻率越高,波長越短,分辨率越高,穿透能力越強(qiáng),所以與其他微波相比,毫米波的分辨率高、指向性好、抗干擾能力強(qiáng)和探測性能好。與紅外相比,毫米波的大氣衰減小、對煙霧灰塵具有更好的穿透性、受天氣影響小。這些特質(zhì)決定了毫米波雷達(dá)具有全天時、全天候的工作能力。 車載毫米波雷達(dá)主要集中在24GHz和77GHz這2個頻段: 24GHz 雷達(dá)主要實(shí)現(xiàn)近程和中程探測,可用于汽車盲點(diǎn)監(jiān)測、車道偏離預(yù)警、泊車輔助等功能。24GHz雷達(dá)是最早劃分出來民用的,很長時間內(nèi)汽車上都用這個。但是現(xiàn)在歐美對24GHz使用帶寬有所限制,并且24GHz雷達(dá)的天線體積因?yàn)椴ㄩL的原因相對較大。
77GHz 雷達(dá)可以實(shí)現(xiàn)遠(yuǎn)程探測,可用于自動緊急制動、自適應(yīng)巡航、前向碰撞預(yù)警等主動安全領(lǐng)域的功能。77GHz雷達(dá)也可以實(shí)現(xiàn)短距和中短距離的汽車應(yīng)用。77GHz的波長是3.9mm,是真正意義上的毫米波,正逐步取代24GHz,成為汽車領(lǐng)域主流的傳感器。
2:毫米波雷達(dá)的基本結(jié)構(gòu)
硬件核心:MMIC芯片和天線PCB板,以FMCW車載雷達(dá)系統(tǒng)為例,主要包括:天線、收發(fā)模塊、信號處理模塊; 
1)前端單片微波集成電路(MMIC) ( 供應(yīng)商:英飛凌、飛思卡爾 、廈門意行和南京米勒;)它包括多種功能電路,如低噪聲放大器(LNA)、功率放大器、混頻器、甚至收發(fā)系統(tǒng)等功能;
特點(diǎn):電路損耗小、噪聲低、頻帶寬、動態(tài)范圍大、功率大、附加效率高、抗電磁輻射能力強(qiáng)等特點(diǎn);
2)雷達(dá)天線高頻PCB板:毫米波雷達(dá)天線的主流方案是微帶陣列,即將高頻PCB板集成在普通的PCB基板上實(shí)現(xiàn)天線的功能,需要在較小的集成空間中保持天線足夠的信號強(qiáng)度。
3:毫米波雷達(dá)基本工作原理
1)利用高頻電路產(chǎn)生特定調(diào)制頻率(FMCW)的電磁波,并通過天線發(fā)送電磁波和接收從目標(biāo)反射回來的電磁波,通過發(fā)送和接收電磁波的參數(shù)來計(jì)算目標(biāo)的各個參數(shù)。
2)可以同時對多個目標(biāo)進(jìn)行測距、測速以及方位測量;測速是根據(jù)多普勒效應(yīng),而方位測量(包括水平角度和垂直角度)是通過天線的陣列方式來實(shí)現(xiàn)的。
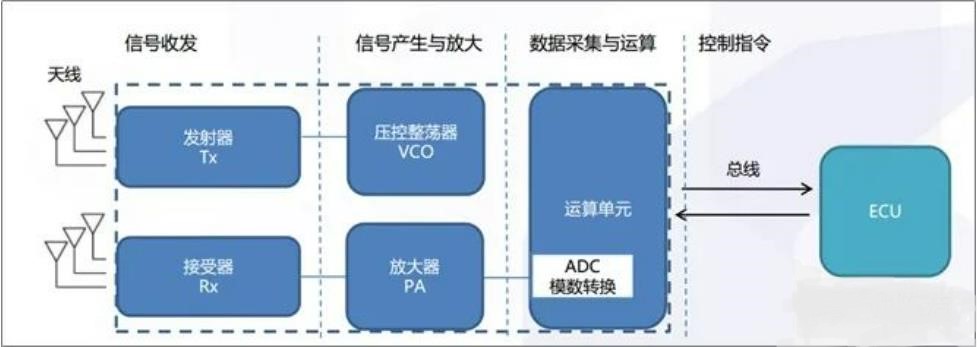
毫米波雷達(dá)基本工作原理示意圖
4:毫米波雷達(dá)的工作體制
1)工作體制 :根據(jù)輻射電磁波方式不同,毫米波雷達(dá)主要有脈沖體制以及連續(xù)波體制兩種工作體制。其中連續(xù)波又可以分為FSK(頻移鍵控)、PSK(相移鍵控)、CW(恒頻連續(xù)波)、FMCW(調(diào)頻連續(xù)波)等方式。
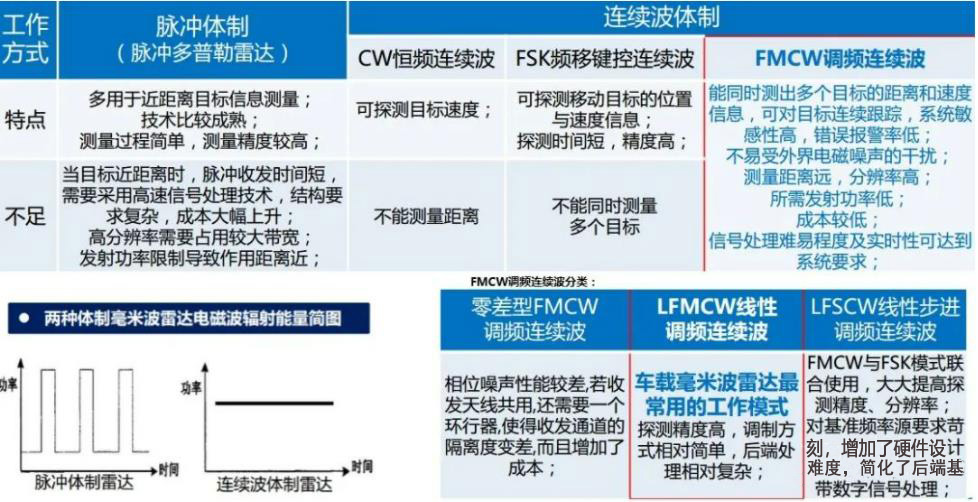
毫米波雷達(dá)不同工作體制
2)FMCW調(diào)頻連續(xù)波雷達(dá)的不同調(diào)制形式:
a、正弦波調(diào)制 b、鋸齒式波調(diào)制 c、三角波調(diào)制
不同調(diào)頻方式的雷達(dá)硬件構(gòu)成基本相同,只有小部分電路模塊、電路參數(shù)與信號處理算法有所區(qū)別;對于單個靜止物體的測量,鋸齒波調(diào)制方式即可滿足;對于運(yùn)動物體,多采用三角波調(diào)制方式;
5:毫米波雷達(dá)測距、側(cè)速、測方位角原理簡介
測距:(TOF)通過給目標(biāo)連續(xù)發(fā)送毫米波信號,然后用傳感器接收從物體返回的毫米波,通過探測毫米波的飛行(往返)時間來得到目標(biāo)物距離。
測速:根據(jù)多普勒效應(yīng),通過計(jì)算返回接收天線的雷達(dá)波的頻率變化就可以得到目標(biāo)相對于雷達(dá)的運(yùn)動速度,簡單地說就是相對速度正比于頻率變化量。
測方位角:通過并列的接收天線收到同一目標(biāo)反射的雷達(dá)波的相位差計(jì)算得到目標(biāo)的方位角;
6:毫米波雷達(dá)在自動駕駛功能上的應(yīng)用
自動駕駛采用的傳感器主要有攝像頭、毫米波雷達(dá)、激光、超聲波、紅外等。毫米波雷達(dá)傳輸距離遠(yuǎn),在傳輸窗口內(nèi)大氣衰減和損耗低,穿透性強(qiáng),可以滿足車輛對全天氣候的適應(yīng)性的要求,并且毫米波本身的特性,決定了毫米波雷達(dá)傳感器器件尺寸小、重量輕等特性。很好的彌補(bǔ)了攝像頭、激光、超聲波、紅外等其他傳感器,在車載應(yīng)用中所不具備的使用場景。
把毫米波雷達(dá)安裝在汽車上,可以測量從雷達(dá)到被測物體之間的距離、角度和相對速度等。利用毫米波雷達(dá)可以實(shí)現(xiàn)自適應(yīng)巡航控制(AdaptiveCruiseControl),前向防撞報警(ForwardCollisionWarning),盲點(diǎn)檢測(BlindSpotDetection),輔助停車(Parkingaid),輔助變道(Lanechangeassistant),自主巡航控制(ACC)等高級駕駛輔助系統(tǒng)(ADAS)功能。比較常見的汽車毫米波雷達(dá)工作頻率在24GHz和77GH附近。24GHz雷達(dá)系統(tǒng)主要實(shí)現(xiàn)近距離探測(SRR),而77GHz系統(tǒng)主要實(shí)現(xiàn)遠(yuǎn)距離的探測(LRR)。
目前,毫米波雷達(dá)主要為24GHz和77GHz。24GHz的雷達(dá)測量距離較短(5~30m),主要應(yīng)用于汽車后方;77GHz的雷達(dá)測量距離較長(30~70m),主要應(yīng)用于汽車前方和兩側(cè)。毫米波雷達(dá)主要包括雷達(dá)射頻前端、信號處理系統(tǒng)、后端算法三部分。在現(xiàn)有的產(chǎn)品中,雷達(dá)后端算法的專利授權(quán)費(fèi)用約占成本的50%,射頻前端約占成本的40%,信號處理系統(tǒng)約占成本的10%。
1、射頻前端:射頻前端通過發(fā)射和接收毫米波,得到中頻信號,從中提取距離、速度等信息。因此,射頻前端直接決定了雷達(dá)系統(tǒng)的性能。當(dāng)前毫米波雷達(dá)射頻前端主要為平面集成電路,有混合微波集成電路(HMIC)和單片微波集成電路(MMIC)兩種形式。其中,MMIC形式的射頻前端成本低,成品率高,適合于大規(guī)模生產(chǎn)。在生產(chǎn)工藝上,一般采用的是外延MESFET、HEMT和HBT等器件工藝。其中,GaAs基的HEMT工藝最為成熟,具有優(yōu)秀的噪聲性能。
2、信號處理系統(tǒng):信號處理系統(tǒng)也是雷達(dá)重要的組成部分,通過嵌入不同的信號處理算法,提取從射頻前端采集得到的中頻信號,獲得特定類型的目標(biāo)信息。信號處理系統(tǒng)一般以DSP為核心,實(shí)現(xiàn)復(fù)雜的數(shù)字信號處理算法,滿足雷達(dá)的實(shí)時性需求。
3、后端算法:后端算法占整個毫米波雷達(dá)成本的比例最高。針對毫米波雷達(dá),國內(nèi)研究人員從頻域、時域、時頻分析多個角度提出了大量的算法,離線實(shí)驗(yàn)的精度也較高。但是,國內(nèi)的雷達(dá)產(chǎn)品主要采用基于頻域的快速傅里葉變換及其改進(jìn)算法進(jìn)行分析,測量精度和適用范圍有一定局限性而國外算法受專利嚴(yán)格保護(hù),價格非常昂貴。
7:毫米波雷達(dá)發(fā)展進(jìn)程
車載毫米波雷達(dá)的研究始于20世紀(jì)60年代,研究主要在以德、美、日等發(fā)達(dá)國家內(nèi)展開。早期車載毫米波雷達(dá)發(fā)展緩慢,21世紀(jì)后隨著汽車市場需求增長開始進(jìn)入蓬勃發(fā)展期。在毫米波雷達(dá)的發(fā)展進(jìn)程中,有一個繞不開的問題就是車載毫米波雷達(dá)頻段劃分。為避免與其他設(shè)備頻段沖突,車載雷達(dá)需要分配專屬頻段,各國頻段劃分略有不同。2015年日內(nèi)瓦世界無線電通信大會將77.5-78.0GHz頻段劃分給無線電定位業(yè)務(wù),以支持短距離高分辨率車載雷達(dá)的發(fā)展,從而使76-81GHz都可用于車載雷達(dá),為全球車載毫米波雷達(dá)的頻率統(tǒng)一指明了方向。隨著谷歌、百度的自動駕駛汽車上路,許多人也對自動駕駛技術(shù)充滿期待。不過目前大部分汽車還處在ADAS(高級駕駛輔助系統(tǒng))應(yīng)用普及的階段,在這個階段中毫米波雷達(dá)就起到了很大的作用。 國際自動機(jī)工程師學(xué)會將智能駕駛的等級分為五個等級,目前我們正處于ADAS階段。ADAS(Advanced Driver AssistantSystem)的普及是未來無人駕駛實(shí)現(xiàn)的先行條件,是提高汽車主動安全性能的技術(shù)基礎(chǔ)。ADAS系統(tǒng)分為環(huán)境感知、計(jì)算分析、控制執(zhí)行三大模塊。其中傳感器在環(huán)境感知模塊中具有重要的作用,多種傳感器融合應(yīng)用是未來必然趨勢,毫米波雷達(dá)將率先成為ADAS系統(tǒng)主力傳感器,接下來看看毫米波產(chǎn)業(yè)鏈全景圖。
8:全球毫米波雷達(dá)產(chǎn)業(yè)鏈全景圖

| 









 QQ好友和群
QQ好友和群 QQ空間
QQ空間 騰訊微博
騰訊微博 騰訊朋友
騰訊朋友 收藏
收藏 淘帖
淘帖 頂
頂 踩
踩
