|
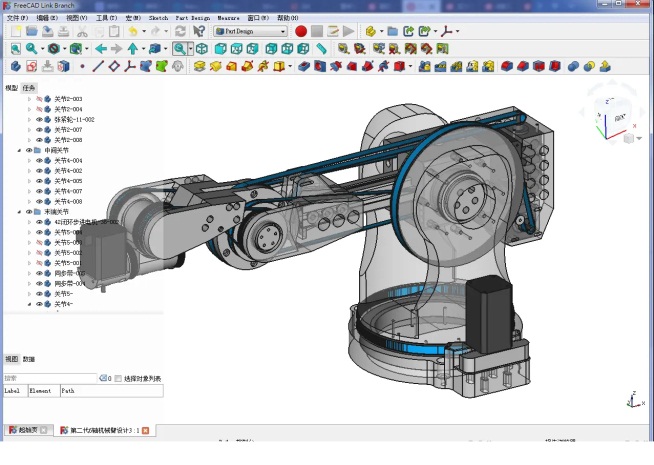
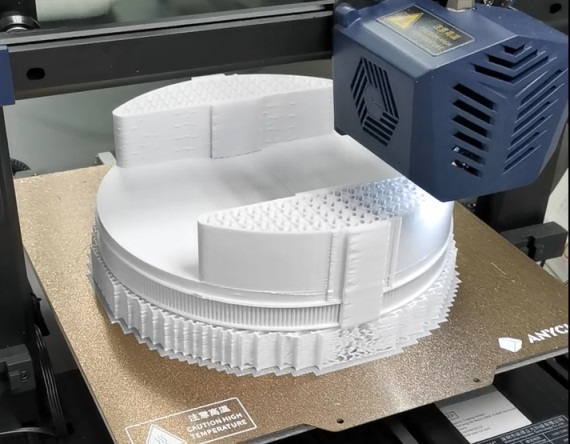
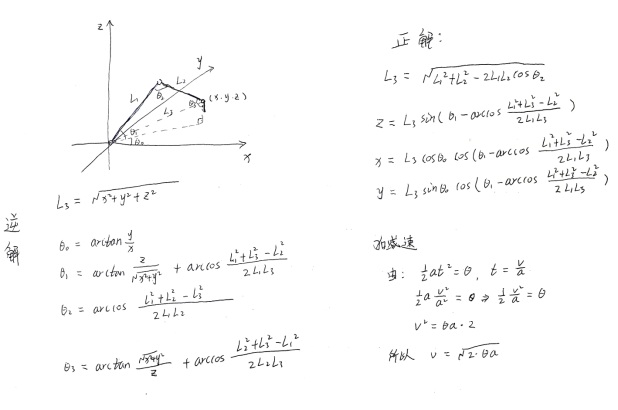
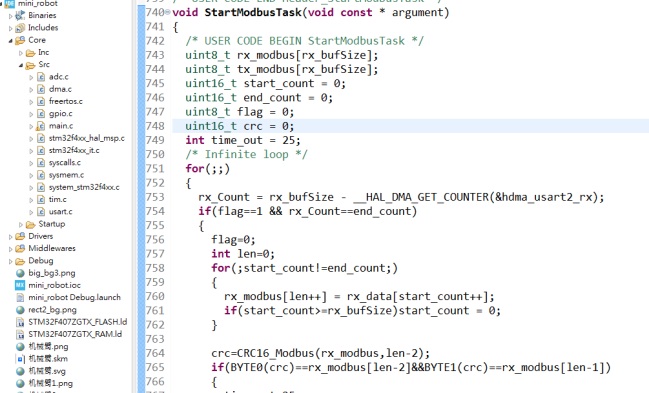
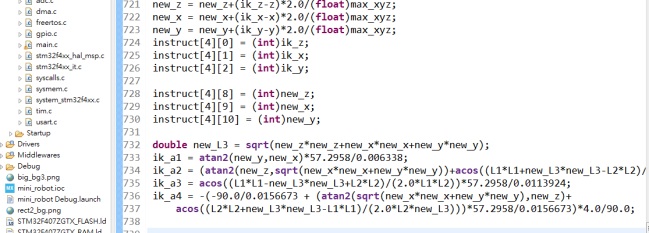
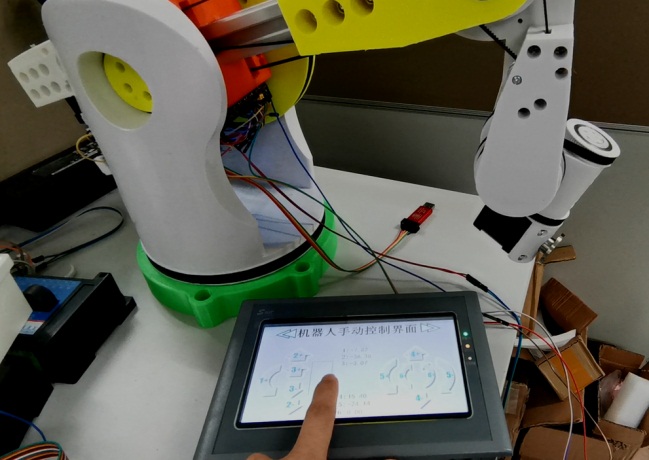
目前市場上面的機械臂大多數在10萬元左右,由于成本太高,不能廣泛應用,只能應用于一些特殊要求的工業場合。那么是不是,可以用制作一臺低成本的6軸機械臂嗎。同樣也找到了一些低成本的機械臂,1萬元以內,他們使用舵機或者步進電機來做,要么就是負載太低,500g負載以內。要么就是精度低,松松垮垮。 在一番探尋和思考之下,有了一個方案。使用同步帶做減速,代替昂貴的減速器,特別是諧波減速器。采用閉環步進電機,提高轉速,減速震動。經過一個月的畫圖和設計,出了一個圖紙 把4個步進電機設計在后面,前面只有一個電機,這樣的結構,起到重力平衡的作用。可以大大提高末端負載,這個最大負載可達1kg。臂長390mm,使用3D打印,制作成本在3000元以內。 設計完成之后就開始使用3D打印出來,因為零件比較大,而且有時候發現打印出來安裝不上,所有又的更改圖紙,基本上是邊更改邊打印的。所以大概花費了2周的時間。 因為機械臂是關節結構的,它的運動軌跡是空間曲線的。但要它走直線或者圓弧的話,就必須進行數學的推導,也叫正解和逆解。我這里使用余弦定理進行計算。在編程方面采用了STM32F4的單片機,因為這個單片機性能比較高,做浮點運算比較快,可以為后面擴展更多的功能。這是一些編程的主要代碼。
大概寫了2000行代碼,包括Modebus與觸控屏通信的程序,和機械臂運動算法程序,程序編寫完成之后,下載到單片機,可以運行
通過點擊觸控屏,控制機械臂走的位置,并且保存這個位置。通過保存多個位置就可以形成需要的軌跡了。目前已經支持關節運動和直線運動。此項目已開源,并且制作過程的視頻也上傳到嗶哩嗶哩了。
使用42閉環步進電機制作的小型6軸桌面機械臂,用同步帶代替減速器的低成本解決方法,臂長390mm,最大負載1kg,精度0.3mm,制作成本3000元以內。可以觸控屏示教,自寫逆向運動算法,已支持關節運動指令和直線運動指令
視頻:https://www.bilibili.com/video/BV1i44y1v7Ef
開源地址:https://gitee.com/qzr123/tiny-6arm
| 



 [復制鏈接]
[復制鏈接]






 QQ好友和群
QQ好友和群 QQ空間
QQ空間 騰訊微博
騰訊微博 騰訊朋友
騰訊朋友 收藏
收藏 淘帖
淘帖 頂
頂 踩
踩



