|
本文主要針對電機的轉速進行測量,然后用數碼管把電機的轉速顯示出來! 本裝置主要有兩部分構成。1光電測速部分。2測得的脈沖處理處理和顯示部分! 光電測速部分主要由光電傳感器構成!脈沖處理部分主要經施密特觸發器對接收到的脈沖進行波形校正,由單片機的T1口輸入,經80C51處理后顯示輸出電機的轉速
下面我們來了解一下光電測速部分! 。 3、脈沖信號的獲得
可以有多種方式來獲得脈沖信號,這些方法有各自的應用場合。下面逐一進行分析。
3.1霍爾傳感器
霍爾傳感器是對磁敏感的傳感元件,常用于開關信號采集的有CS3020、CS3040等,這種傳感器是一個3端器件,外形與三極管相似,只要接上電源、地,即可工作,輸出通常是集電極開路(OC)門輸出,工作電壓范圍寬,使用非常方便。如圖1所示是CS3020的外形圖,將有字面對準自己,三根引腳從左向右分別是Vcc,地,輸出。
 此主題相關圖片如下:1.jpg

圖1 CS3020外形圖
使用霍爾傳感器獲得脈沖信號,其機械結構也可以做得較為簡單,只要在轉軸的圓周上粘上一粒磁鋼,讓霍爾開關靠近磁鋼,就有信號輸出,轉軸旋轉時,就會不斷地產生脈沖信號輸出。如果在圓周上粘上多粒磁鋼,可以實現旋轉一周,獲得多個脈沖輸出。在粘磁鋼時要注意,霍爾傳感器對磁場方向敏感,粘之前可以先手動接近一下傳感器,如果沒有信號輸出,可以換一個方向再試。 這種傳感器不怕灰塵、油污,在工業現場應用廣泛。
3.2.光電傳感器
光電傳感器是應用非常廣泛的一種器件,有各種各樣的形式,如透射式、反射式等,基本的原理就是當發射管光照射到接收管時,接收管導通,反之關斷。以透射式為例,如圖2所示,當不透光的物體擋住發射與接收之間的間隙時,開關管關斷,否則打開。為此,可以制作一個遮光葉片如圖3所示,安裝在轉軸上,當扇葉經過時,產生脈沖信號。當葉片數較多時,旋轉一周可以獲得多個脈沖信號。

圖2光電傳感器的原理圖
此主題相關圖片如下:3.jpg

圖3遮光葉片
3.3.光電編碼器
光電編碼器的工作原理與光電傳感器一樣,不過它已將光電傳感器、電子電路、碼盤等做成一個整體,只要用連軸器將光電傳感器的軸與轉軸相連,就能獲得多種輸出信號。它廣泛應用于數控機床、回轉臺、伺服傳動、機器人、雷達、軍事目標測定等需要檢測角度的裝置和設備中。如圖4所示,是某光電編碼器的外形。
此主題相關圖片如下:4.jpg

圖4 成品光電編碼器 這次課設我選的是光電傳感器,采用穿透法測量電機轉速。光電傳感器的原理上面有詳細的介紹。 當不透光的物體擋住發射與接收之間的間隙時,開關管關斷,否則打開。為此,可以制作一個遮光葉片如圖3所示,安裝在轉軸上,當扇葉經過時,產生脈沖信號。當葉片數較多時,旋轉一周可以獲得多個脈沖信號。 這里我們才用轉10個孔的方式!在一分鐘的時間內,假如產生了10000脈沖,則電機的轉速就為1000r/min. 4、硬件連接
測速的方法決定了測速信號的硬件連接,測速實際上就是測頻,因此,頻率測量的一些原則同樣適用于測速。
通常,可以用計數法、測脈寬法和等精度法來進行測試。所謂計數法,就是給定一個閘門時間,在閘門時間內計數輸入的脈沖個數;測脈寬法是利用待測信號的脈寬來控制計數門,對一個高精度的高頻計數信號進行計數。由于閘門與被測信號不能同步,因此,這兩種方法都存在±1誤差的問題,第一種方法適用于信號頻率高時使用,第二種方法則在信號頻率低時使用。等精度法則對高、低頻信號都有很好的適應性。
這里為簡化討論,僅采用計數法來進行測試。
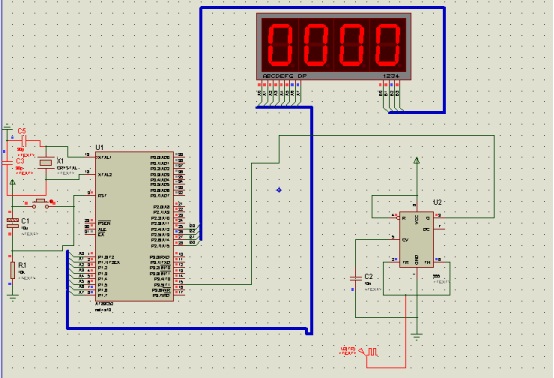
如上圖:因為光電傳感器不好仿真,這里我們采用了555芯片構成一個施密特觸發器,由光電傳感器得到的脈沖由2,5腳輸入,經3腳輸出接到單片機的T1(P3.5).。經89C51編程處理后由P1口輸出通過數碼管顯示出轉速! 5、實驗程序及分析
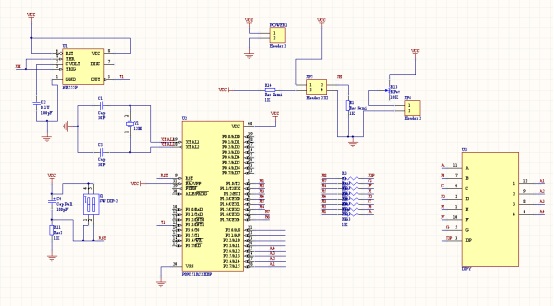
測量轉速,使用光電傳感器,被測電機帶動紙片旋轉,我們在紙片上開了10小孔,電機每旋轉一周就會產生10個脈沖,產生12個脈沖,要求將轉速值(轉/分)顯示在數碼管上。 實驗程序如下: 6.軟件仿真: 如上圖:光電傳感器測得脈沖由555的2或5腳輸入,由555的三腳輸出,接入AT9C51的P3.5口。P2.4---P2.7為數碼管的位選端口,p1為數據端口。 7.用protel DXP畫出原理圖如下: 8、根據原理圖得到的PCB:
9、硬件調試結果: 這次設計,主要對電機進行測速,在電機的碼盤上轉了10個孔, 沒10ms 對電機測量一次轉速!由于工具不太足,做硬件的時候遇到了不少的困難! 總體來說能夠實現其基本功能!電機轉速700---1500r/min.
以上的Word格式文檔51黑下載地址:
 電機轉速測量系統.doc
(373.5 KB, 下載次數: 157)
電機轉速測量系統.doc
(373.5 KB, 下載次數: 157)
2020-5-30 01:34 上傳
點擊文件名下載附件
下載積分: 黑幣 -5
| 



 [復制鏈接]
[復制鏈接]







 QQ好友和群
QQ好友和群 QQ空間
QQ空間 騰訊微博
騰訊微博 騰訊朋友
騰訊朋友 收藏
收藏 淘帖
淘帖 頂
頂 踩
踩

