|
�������Ҫ�c�r(sh��)���M(j��n)�ͱ��Ҫ���ܻ�����ӹ��̎��͏V�����Ӑۺ���ϣ���ܽ���Ӌ(j��)��C(j��)�����y�ȣ����������������ܵ���Ӯa(ch��n)Ʒ������ͨ�{(l��n)���C(j��)����С܇�����������l(f��)��������(ji��n)�εĈD�ξ��̣������������ܵ���Ӯa(ch��n)Ʒ�� �����x��Arduino uno��Ƭ�C(j��)�����_�l(f��)���壬�x��Mixly(��˼�R)�D�ξ���ܛ�����̣����ⷱ����(f��)�s�ľ��̳���������51��Ƭ�C(j��)������Ӌ(j��)��C(j��)��ʹ���Д��Ӌ(j��)��(sh��)�����_(d��)��PWM늙C(j��)�{(di��o)�ٺ�Ӳ���ӕr(sh��)���ܣ�Ҫ���ܶ����߀Ҫ�{(di��o)���^�ļ���߀Ҫ���g��(f��)�s�ij������ϳ����F(xi��n)���҂�?c��)�Arduino��Ƭ�C(j��)����Mixly(��˼�R)�D�ξ���ܛ�����̣����Hʹ�þ��̸����ף����������Įa(ch��n)Ʒ��Ȼ�ܱ��ϸ��|(zh��)���� ���Ȱ����{(l��n)���C(j��)����С܇�Č�(sh��)��Da.b.c.d���Ԍ�ُ(g��u)�Iģ�K��Ԫ������
������w�fһ���������ҪԪ�����x�� Adiuino ��Ƭ�C(j��)���壺 ������M(j��n)��ԭ�b��Ƭ�C(j��)�����Ԍ������r(ji��)85-168Ԫ����Ҋ�D�� ��(gu��)�a(ch��n)����Arduino UNO��Ƭ�C(j��)����16��48Ԫ����Ҋ�D�� ��(j��ng)���ˌ�(sh��)�Hʹ�Ç�(gu��)�a(ch��n)�����������ϲ���ԭ�b�IJ��ԭ�b�����ķ�֮һ�ăr(ji��)���h��(j��ng)��(j��)��(sh��)�ݵ�����ُ(g��u)�I�� �U(ku��)չ���Ԍ��r(ji��)10Ԫ���ң��Á�U(ku��)չ�ӿڷ���Ӿ����o�ɂ�(g��)�����D�� �{(l��n)��HC-05 ���ęC(j��)һ�w�{(l��n)��ģ�K�Ԍ������r(ji��)28Ԫ��
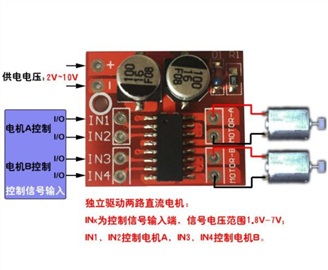
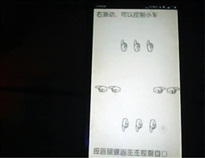
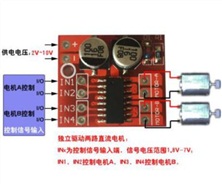
С܇܇�w����x��ɂ�(g��)늙C(j��)�D(zhu��n)������ģ� ����ģ�K2�K����;���y(c��)�࣬���x�_(d��)���O(sh��)��������С܇ǰ����ϡ� �t�����ģ�K4�K����;:���x�_(d��)���O(sh��)��������С܇���Ă�(g��)�DZ��ϡ� L298N늙C(j��)�(q��)��(d��ng)ģ�K ���چ�Ƭ�C(j��)����Ĺ����^С��ؓ(f��)�d������������Ҫ����늙C(j��)�(q��)��(d��ng)ģ�K���(q��)��(d��ng)늙C(j��)�\(y��n)�D(zhu��n)��߀Ҫ���7.2V���늳ع�늡� ��D��L298N늙C(j��)�(q��)��(d��ng)ģ�K�Ǵ��ʵģ����(q��)��(d��ng)4��(g��)늙C(j��)����PWMʹ�ܿ��ƽӿڣ�������ñ�x���҈D��ģ�K���(q��)��(d��ng)2��(g��)늙C(j��)���������õ����@��@��늙C(j��)�(q��)��(d��ng)ģ�K�w�eС��������ͣ��r(ji��)��dz��ͣ��]��PWM�}���{(di��o)���{(di��o)��ʹ�ܽӿڣ��m��Arduino��Ƭ�C(j��)���m��51��Ƭ�C(j��)�� ��(sh��)��늉���ģ�K�� ��(sh��)��늉���ģ�K�Á��@ʾ�늳ص�늉�����ֹʹ�����늳�늉�������ȫ늉�����ʹ�늳؈�(b��o)�U�� USB-TTL����ģ�K�Á��ʹ���ܛ���{(di��o)ԇ���O(sh��)���{(l��n)��ģ�K�������r(ji��)5Ԫ���o���{(di��o)ԇ���������w�����ɲ鿴�̼ҽo�ļ��g(sh��)�����փ�(c��)������������{(l��n)��ͨӍ����Ҳ�ɲ��ã��� Ӳ�����R���҂������b�֙C(j��)APPܛ���� �҂��{(l��n)��ģ�K��̖(h��o)�x��HC-05,�ܺ�HC-05�{(l��n)��ģ�K���ݵ���λ�C(j��)APPܛ���ܶ࣬����JDY-18�{(l��n)��ģ�KͨӍ���x60��ͦ�h(yu��n)�����{(l��n)��ģ�K�������Ҳ������ݵ��֙C(j��)ܛ�����������]�ɂ�(g��)ܛ�������̼�ɂ�(g��)ܛ���O(sh��)�á� �{(l��n)��С܇��ܛ�����Ʒ�ʽ���|����ʽ�l(f��)ָ��D�քe���{(l��n)��С܇ܛ���D��(bi��o)���{(l��n)��С܇�������棬�{(l��n)��С܇ָ���O(sh��)�ÈD���档
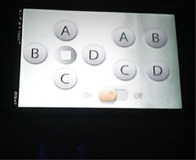
�@��(g��)ܛ���������^��(ji��n)�Σ����Ƿdz����á���ָ�ŵ�������^�����\(y��n)�У���ָ�x�_��ֹͣ�������I���O(sh��)�����Լ����x�ġ� �{(l��n)������С܇:ܛ�����Ʒ�ʽ���Z(y��)��ģʽ�����Iģʽ������ģʽ���ք�(sh��)ģʽ����N��ʽҊ�D��
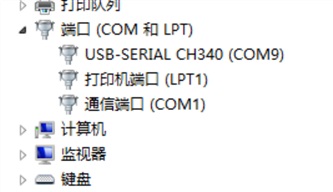
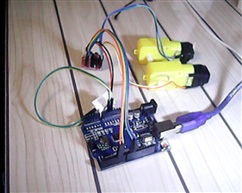
�֙C(j��)ܛ�����b�ú��҂������bMixly(��˼�R)�D�ξ���ܛ���� ���d���b�������Xϵ�y(t��ng)�ϣ�������Arduin�_�l(f��)��嵽��XUSB���ϣ����(bi��o)���I�Γ��@�_(t��i)��X���c(di��n)�O(sh��)������������_�˿�С����ӛ�¶˿�̖(h��o)�� �F(xi��n)���҂������������{(l��n)��ģ�K���֙C(j��)APPܛ��ͨ�ų��� ���_��˼�Rܛ�����D�ѳ���?q��)��ú��c(di��n)���g���ɹ��������½ǵ�������̖(h��o)�x���(xi��ng)Ŀ ���c(di��n)�xArduino Uno,�˿�̖(h��o)�x�����X�˿��Ϝy(c��)�����ǂ�(g��)̖(h��o)�����@����COM9,Ҋ�D�� Ȼ���c(di��n)�ς������������Ƭ�C(j��)�У��P(gu��n)�]��Ƭ�C(j��)�Դ���F(xi��n)�ڰ��{(l��n)��ģ�K�öŰ���D�B�ӵ�Arduino�����ϣ�LED�Ͳ�Ҫ���ˣ��ô��ڱO(ji��n)ҕ���鿴���ڵĔ�(sh��)�a���ַ����@ʾ�����ˡ�
�{(l��n)��ģ�K�� TX �c Arduino RX �B�ӣ�RX �c Arduino TX �B�ӣ��{(l��n)��ģ�K��VCC�B��Arduino 5V���{(l��n)��ģ�K��GND�B��Arduino GND
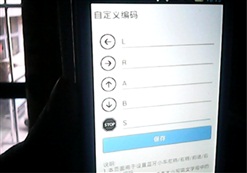
�F(xi��n)����늴��_�˿ڣ��c(di��n)�����ڱO(ji��n)ҕ��������_�^�촮����̖(h��o)�҂��l(f��)�F(xi��n)ȫ��16�M(j��n)�Ƶ�F�@���֙C(j��)�]�аl(f��)ָ��F(xi��n)���҂����{(l��n)������С܇��APPܛ���l(f��)ָ�����������ͣ�I�چ�Ƭ�C(j��)���ڷքe�@ʾ2��8��6��7��3���y(c��)ԇ�Z(y��)��ָ��ǰ�M(j��n)�����ˡ����D(zhu��n)�����D(zhu��n)��ֹͣ�քe�õ���2��8��9��16��3.Ҋ�D��
�����҂�����ͬ�ķ�����(du��)�{(l��n)��С܇ܛ����ָ���M(j��n)�Мy(c��)ԇ�������֙C(j��)ܛ���Ќ�ǰ������ͣ�քe�O(sh��)�óɴ���ĸA��B��L��R��S��Ȼ��ε��{(l��n)��ģ�K��VCC 5V늉��Č�(d��o)������Arduino�����������һ���ǔ��_�{(l��n)��ģ�K��������B�ӣ���t���H�ς�ʧ��߀���ܓp��ģ�K�������_��˼�Rܛ�����D���̜y(c��)ԇ�Y(ji��)����D�� �{(l��n)��С܇��λ�C(j��)�l(f��)����ָ���16�M(j��n)�Ɣ�(sh��)�����dz����ַ��������҂�Ҫ��ӡ�xȡ�ַ��������˕r(sh��)����ô��ڱO(ji��n)ҕ���^������С܇�l(f��)��ָ���(hu��)�l(f��)�F(xi��n)�����Ʊ���һ�ӵ������̖(h��o)����?y��n)���Щ���?h��o)�����Ҳ��������Ը���16�M(j��n)�ƽ��ܡ����{(l��n)��С܇ܛ���������@�N���}�������_���ڱO(ji��n)ҕ���҂�����ָ�ŵ���������ֹͣ�I�ό�(du��)��(y��ng)���ڱO(ji��n)ҕ���@ʾABLRS,��(d��ng)��ָ�x�_��(hu��)�@ʾS�����@һ���{(l��n)��ģ�K���֙C(j��)ͨӍ�ѽ�(j��ng)�ɹ��������҂����՜y(c��)ԇ�Y(ji��)������˼�Rܛ���Ͼ������c�@�ɷN�֙C(j��)ܛ��ƥ����{(l��n)������С܇�ij���Ҋ�D: �D�Ǹ�����(sh��)ģ�K�ۯB��ij���D���Dz��Ǹ��X����ˬ���@����?y��n)��҂�������ķ������ú��?sh��)���̡���Ҫ�˽⺯��(sh��)�r(sh��)�҂�������lչ�_������һ�������ײ����ҽ�ጳ����@�LjD�ξ��̵ĺ�̎��
�҂����D�B��Ԫ������
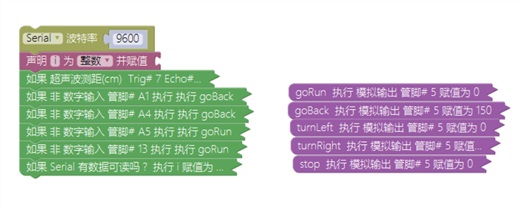
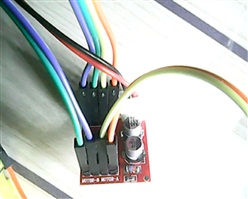
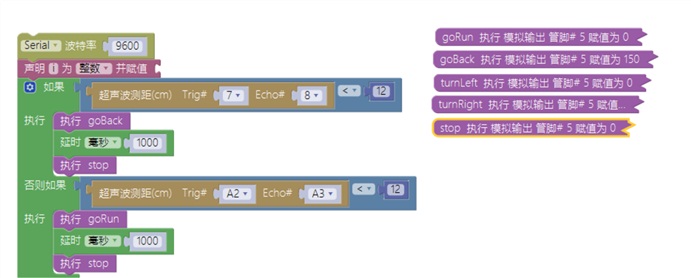
���ɂ�(g��)늙C(j��)�քe�ӵ�늙C(j��)A��늙C(j��)B�ϣ���늙C(j��)�(q��)��(d��ng)ģ�K���öŰ��A1,A2�քe�ӵ�Arduino����Ľӿ�5�ͽӿ�6�ϣ�B1,B2�քe�ӵ�Arduino����Ľӿ�9�ͽӿ�10�ϡ���Arduino����Ľӿ�5V��GND�քe�ӵ�늙C(j��)�(q��)��(d��ng)��ġ�+���͡�-���ϡ���С܇�Ͻ��꾀������b��܇݆Ҫ݆�ӑҿգ�Ո(q��ng)��Ҫ�B���{(l��n)��ģ�K�������������b��������P(gu��n)�C(j��)��������Arduino�����B���{(l��n)��ģ�K�����֙C(j��)�l(f��)��ǰ�M(j��n)ָ��^���늙C(j��)܇݆�����D(zhu��n)�����Ƿ���ǰ�M(j��n)�D(zhu��n)����������������Arduino�����ϵ�5��6��9��10�Ű���^��(du��)�{(di��o)���{(di��o)������܇݆�D(zhu��n)��(d��ng)������ǰ�M(j��n)��OK�ˡ��ɂ�(g��)݆�ӵ��ٶ��{(di��o)���҂����ã�PWM���}�_�����{(di��o)��,�ٶȵ��xֵ��������120-255֮�g�x�ɂ�(g��)݆��늙C(j��)�D(zhu��n)�������ͬС܇�Ͳ�����ֱ������Ҫ������(y��ng)���{(di��o)������(sh��)ֵԽ���D(zhu��n)��Խ�졣�����҂��o�C(j��)���˰��b��������ģ�K�ͼt�����ģ�K�� �҂�չ�_��������(sh��)�ij��� ������ǰ��ij���ģ�K��Trig�l(f��)���Echo�����Ƿքe����Arduino����ĵ�7�͵�8�ӿ��ϵģ��҂��öŰ�������B����һ���ٰ�ģ�K��VCC��GND�քe�ӵ�Arduino�����5V��GND�ϡ���С܇����ij���ģ�K��Trig�l(f��)���Echo���ܷքe����Arduino����ĵ�A2�͵�A3�ӿ��ϣ��ٰ�ģ�K��VCC��GND�քe�ӵ�Arduino�����5V��GND�ϡ�������С܇�ı��Ͼ��x��С��12mm,�M(j��n)����Ϸ����������\(y��n)��1���ֹͣ��������D(zhu��n)��͏�(f��)�s�Ą�(d��ng)����(hu��)��늳��������ĕr(sh��)��С܇�b��ʧ�`��ֱ��STOP,�͛]���@�N�F(xi��n)�������_�t����Ϻ���(sh��)���� 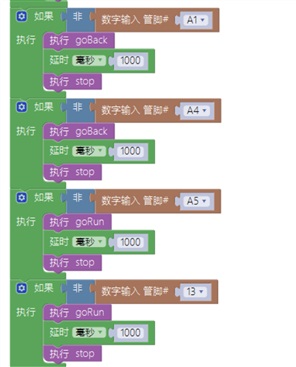 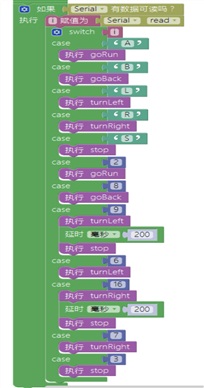 ������С܇4��(g��)�ǵļt�����ģ�K��OUTݔ���քe�ӵ�Arduino�����A1.A4.A5.13�ӿڣ��������Ե�VCC��GND�քe�ӵ�Arduino�����5V��GND�ϡ������зǔ�(sh��)��ݔ����_����˼���@��(g��)���_ݔ����ǵ��ƽ���t����չܛ]���յ��t��l(f��)�䲨���t����յ���̖(h��o)�r(sh��)���ڱO(ji��n)ҕ�����@ʾ��1�����Ǹ��ƽ���ܵ��ϵK���@ʾ��0��ģ�K�B�Ӻú�o�C(j��)����С܇��늣������7.2V(�ɹ�(ji��)1650�늳ش�(li��n)�������2��(g��)�@�ӵĴ�(li��n)늳��ٲ�(li��n)Ч�����ã���С܇�����r(sh��)�g�ӱ�߀�ܱ��o(h��)�늳أ��籾���Դ)����ʮ���ݽz���{(di��o)�����t��ģ�K�ı��Ϸ��������w�������Ʒŵ�ģ�Kǰ��ǰ�������Ƅ�(d��ng)����,���D(zhu��n)ģ�K�ϵ��λ���{(di��o)�����x��s4-6cm�ɂ�(g��)LED��������ֹ��4��(g��)�ǵ�ģ�K��Ҫ�@���{(di��o)�á� �{(l��n)���b�س���Ҋ�ψD�������ǰ��{(l��n)������С܇���{(l��n)��С܇�Ķ�Nģʽ���ģ��������Z(y��)�����Ƶ�9��16�Ǽ����ӕr(sh��)200�����STOP����(sh��)�������D(zhu��n)��(d��ng)�ĽǶ���20�����ҡ���ҿ��Ը���(j��)�Լ�����Ҫ�`���ƶ��D(zhu��n)��(d��ng)�Ƕȡ�
����С܇��݆���f(w��n)��݆������ֱ������4�(q��)С܇����(d��ng)��Ҳ��4�(q��)С������4�(q��)ʡ늡����(q��)�����꣬���(q��)С܇���������(hu��)�X�����練�ƣ� ����4�(q��)늙C(j��)�(q��)��(d��ng)ģ�KҊ�ψD�����D�Ӿ��������ԼӸĄ�(d��ng)���B��4��(g��)�ӿڣ�3��4��11��12��,����߅�ɂ�(g��)늙C(j��)��(li��n)�ٌ���߅�ăɂ�(g��)늙C(j��)��(li��n)�������������Ą�(d��ng)���x��߀�ɸ���(j��)�Լ�����Ҫ�����������ܣ�����WiFi�h(yu��n)���b��?c��i)z������С܇���o���{����z���w�C(j��)�ȡ�
���ߣ� Ѧ �� | 




 ����TQQ:125739409;���g(sh��)����QQȺ281945664
����TQQ:125739409;���g(sh��)����QQȺ281945664







































 QQ���Ѻ�Ⱥ
QQ���Ѻ�Ⱥ QQ���g
QQ���g �vӍ��
�vӍ�� �vӍ����
�vӍ���� �ղ�
�ղ� ����
���� �
� ��
��