plc注塑機有自動模式和手動模式,初學者自己寫的
注塑機簡介 注塑機又名注射成型機或注射機。它是將熱塑性塑料或熱固性塑料利用塑料成型模具制成各種形狀的塑料制品的主要成型設備。分為立式、臥式、全電式。注塑機能加熱塑料,對熔融塑料施加高壓,使其射出而充滿模具型腔。塑料注射成型機(簡稱注塑機)是一集機、電、液于一體的典型系統。由于注塑加工能夠一次成型形狀復雜的塑料制品,同時可供加工的塑料種類也非常多,具有效率高、后加工量少、適應性強等諸多優點,因而自問世以來,發展非常迅速。目前,注塑加工已成為塑料加工最為主要的加工方法。PLC 是上世紀60 年代末發明的工業控制器件,誕生之初主要被用于生產線及大型機械的控制。隨著計算機技術的飛速發展,PLC的軟、硬件技術也取得巨大進步,以PLC為核心的控制系統的成本迅速下降,極大地拓展了其工業應用的范圍。傳統中、小型注塑機的電氣控制系統大多采用繼電器和開關閥控制。這種控制方法接線復雜、自動化程度低,故障率高且不方便維修,尤其是缺乏柔性。即當系統的生產工藝或對象改變時,原有的接線和控制柜則必須要進行改變,系統的靈活性差。小型PLC 系統,它具有運算速度快、存儲器容量大、功能強、可靠性高等優點,被廣泛運用于各種有自動化控制要求的場合。將其用于注塑機液壓系統的自動控制實現或改造,失為一種既經濟又切合實際的解決方案。 2、工作原理 注塑機的工作原理與打針用的注射器相似,它是借助螺桿(或柱塞)的推力,將已塑化好的熔融狀態(即粘流態)的塑料注射入閉合好的模腔內,經固化定型后取得制品的工藝過程。 注射成型是一個循環的過程,每一周期主要包括:定量加料—熔融塑化—施壓注射—充模冷卻—啟模取件。取出塑件后又再閉模,進行下一個循環。 注塑機操作項目:注塑機操作項目包括控制鍵盤操作、電器控制系統操作和液壓系統操作三個方面。分別進行注射過程動作、加料動作、注射壓力、注射速度、頂出型式的選擇,料筒各段溫度的監控,注射壓力和背壓壓力的調節等。 一般螺桿式注塑機的成型工藝過程是:首先將粒狀或粉狀塑料加入機筒內,并通過螺桿的旋轉和機筒外壁加熱使塑料成為熔融狀態,然后機器進行合模和注射座前移,使噴嘴貼緊模具的澆口道,接著向注射缸通入壓力油,使螺桿向前推進,從而以很高的壓力和較快的速度將熔料注入溫度較低的閉合模具內,經過一定時間和壓力保持(又稱保壓)、冷卻,使其固化成型,便可開模取出制品(保壓的目的是防止模腔中熔料的反流、向模腔內補充物料,以及保證制品具有一定的密度和尺寸公差)。注射成型的基本要求是塑化、注射和成型。塑化是實現和保證成型制品質量的前提,而為滿足成型的要求,注射必須保證有足夠的壓力和速度。同時,由于注射壓力很高,相應地在模腔中產生很高的壓力(模腔內的平均壓力一般在20~45MPa之間),因此必須有足夠大的合模力。由此可見,注射裝置和合模裝置是注塑機的關鍵部件。 3、項目設計意義 注塑速度的比例控制已經被注塑機制造商廣泛采用。雖然電腦控制注塑速度分段控制系統早已存在,但由于相關的資料有限,這種機器設置的優勢很少得到發揮。本文將系統的說明應用多段速度注塑的優點,并概括地介紹其在消除短射、困氣、縮水等制品缺陷上的用途。 調整注塑速度可以幫助消除由于在入水口位出現的流動放慢而引起的缺陷。當熔體經過射嘴和流道到達入水口時,熔體前鋒的表面可能已經冷卻凝固,或者由于流道突然變窄而造成熔體的停滯,直到建立起足夠的壓力推動熔體穿過入水口,這就會使通過入水口的壓力出現峰形。高壓將損傷材料并造成諸如流痕和入水口燒焦等表面缺陷,這種情況可以通過剛好在入水口前減速的方法克服上述缺陷。這種減速可以防止入水口位的過度剪切,然后再將射速提高到原來的數值。因為精確控制射速在入水口位減慢是非常困難的,所以在流道末段減速是一個較好的方案。 我們可以通過控制末段射膠速度來避免或減少諸如飛邊、燒焦、困氣等缺陷。填充末段減速可以防止型腔過度填充,避免出現飛邊及減少殘余應力。由于模具流徑末端排氣不良或填充問題引起的困氣,也可以通過降低排氣速度,特別是射膠末段的排氣速度加以解決。 塑料注射成型機(簡稱注塑機)是一集機、電、液于一體的典型系統。注塑機用于熱塑性塑料的面型加工,注塑機通過11個電磁閥YV1~YV11配合完成閉模、進料、加熱、射臺前進、注射壓力1、注射壓力2、冷卻、射臺后退、開模、頂針前進、頂針后退、后退等工序,其中注射,加熱和冷卻工序需要延時一定的時間以完成工序要求。 (1)根據控制對象的用途、基本結構、運動形式、工藝過程、工作環境和控制要求,確定控制方案。 (2)繪制搬運機械手控制系統的PLC I/O接線圖和梯形圖,寫出指令程序清單。 (3)選擇電器元件,列出電器元件明細表。 (4)上機調試程序。 (5)編寫設計說明書 任務流程圖如下 
三、設計方案 1、控制對象描述 注塑機生產一個產品一般要經過閉模、進料、加熱、射臺前進、注射壓力1、注射壓力2、冷卻、射臺后退、開模、頂針前進、頂針后退、后退等工序。這些動作均由TV1 ~ TV11電磁閥配合控制液壓回路完成。注塑機的工作方式有自動和手動兩種形式,它的自動循環工藝圖見圖所示。 圖1 系統流程圖 顯而易見注塑機的控制過程是順序的控制。它的工作順序是一步一步的進行,首先從必須開始到頂出產品為一個循環,就這樣周而復始的進行下去。它的每個工步執行指令使電磁閥動作,用限位開關SQ1 ~ SQ8和計時器T0、T1、T2、T3來判斷每一步是否完成,只有當前這一步完成之后才能進入下一步的操作。 當然除了自動的工作方式外,還有手動的工作方式。手動控制的操作流程圖如下圖所示手動的工作方式主要是為了方便調整設備,以及方便單件產品的生產。所謂的手動,就是注塑機的每一個工步都設置一個按鈕,當我們把按鈕按下時機器就會執行該按鈕對應的那一步動作。 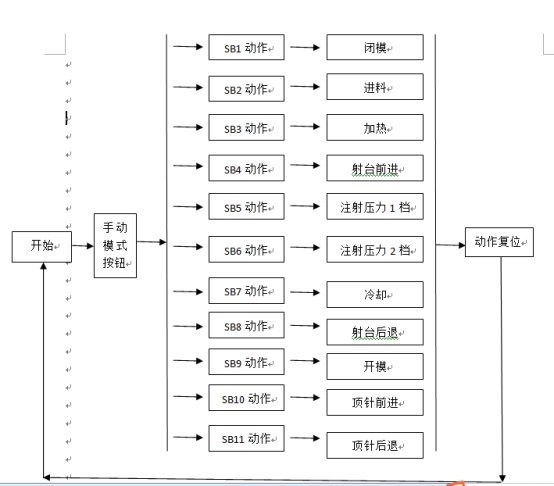
圖2 手動控制流程圖 2、控制方案 1、按下啟動按鈕SB,在電磁閥YV1作用下,注塑機開始閉模。 2、到達閉模終止限位開關SQ1 ,注塑機停止閉模,在電磁閥YV2的作用下,注塑機開始進料 3、到達進料限位限位開關SQ2,注塑機射臺停止進料,在電磁閥YV3作用下,注塑機開始加熱。 4、加熱延時5s時間到后,注塑機停止加熱,在電磁閥YV4作用下,注塑機開始射臺前進, 5、射臺前進終止,到達限位開關SQ3,在電磁閥YV5作用下,注塑機開始注塑機注射壓力1(高速)。 6、延時3S后,在電磁閥YV6的作用下,注塑機開始注塑機注射壓力2(低速)。 7、延時2S,在電磁閥YV7作用下,注塑機開始冷卻。 8、延時4S后,注塑機電磁閥YV8作用下注塑機射臺后退。 9、射臺后退停止,到達限位開關SQ4后,在電磁閥YV9作用下,注塑機開模。 10、到達開模終止限位開關SQ5后,注塑機在電磁閥YV10作用下,注塑機頂針前進。 11、到達頂針開關前進終止限位開關SQ6, 注塑機在電磁閥YV11作用下,注塑機頂針后退。 12、到達注塑機頂針后退終止限位開關SQ7后,注塑機復位。 13、在任意運行過程中可以通過X0按鈕強行中斷并返回。 14、在注塑機沒有啟動之前,可以通過X14的按鈕講自動模式切換為手動控制模式。 15、在手動模式下,可以通過X1到X13分別控制閉模,開模,射臺前進,射臺后退,注射,保壓1檔,注射,保壓2檔,加熱,進料,冷卻,頂針前進,頂針后退。 3、創新點 (1)分段調節原料進入模具的速度以及壓力, 這樣一些較為復雜結構的產品可以降低不良率。 (2)分為手動模式和自動模式,并且可以任意切換。 四、硬件設計與接線 1、PLC I/O地址分配表 本次注塑機系統設計所需要的輸入設備:限位開關 *8 輸出設備:電磁閥 *8 考慮到實際情況和實驗室提供的設備,決定利用通用控制模塊上的LED燈的代替模擬電磁閥的輸出作用效果。因此所得到的I/O地址分配表如下: 圖3 自動模式IO分配表
| 序號 | 面板 | I/O | 作用 | | 1 | S0 | X0 | 停止返回 | 輸入 | 2 | S1 | X1 | 閉模 | 3 | S2 | X2 | 進料 | 4 | S3 | X3 | 射臺前進 | 5 | S4 | X4 | 射臺后退 | 6 | S5 | X5 | 開模 | 7 | S6 | X6 | 頂針前進 | 8 | S7 | X7 | 頂針后退 | 9 | S8 | X10 | 加熱 | 10 | S9 | X11 | 注射,壓力1檔高速 | 11 | S10 | `X12 | 注射,壓力2檔低速 | 12 | S11 | X13 | 加冷卻液 | 13 | S1 | X14 | 模式切換 |
圖4 手動模式IO分配表 2、PLC外圍接 圖5 系統外圍接線圖
3、PLC功能表圖 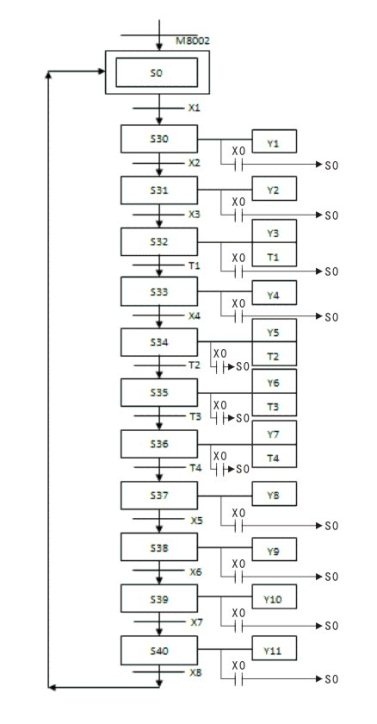
圖6 自動控制功能表圖 (2)手動控制功能表圖 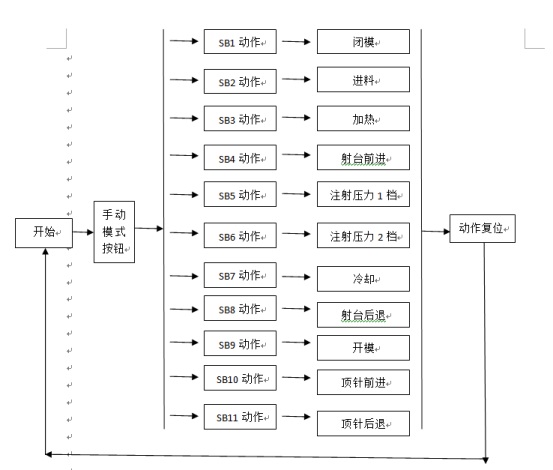
圖7 手動控制功能表圖 
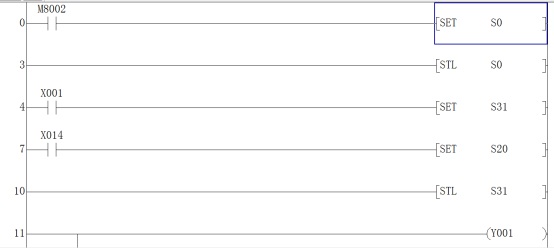
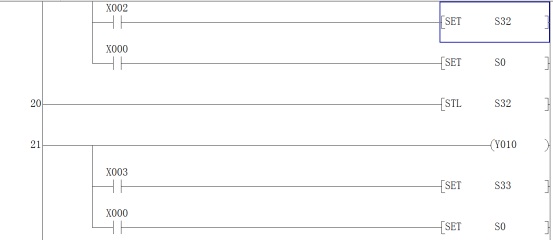
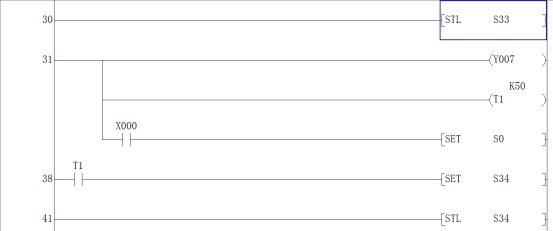
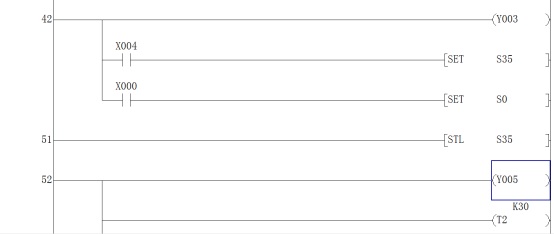
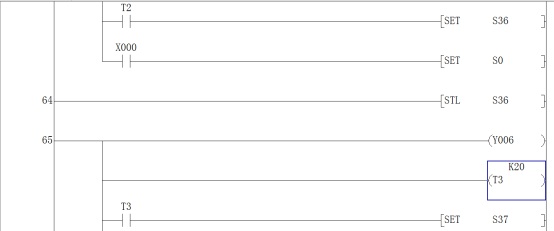
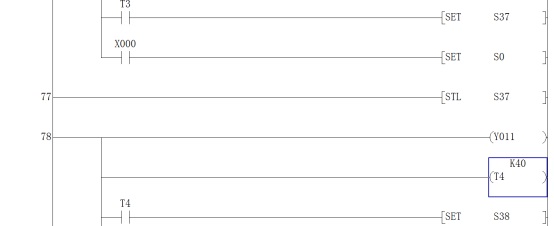
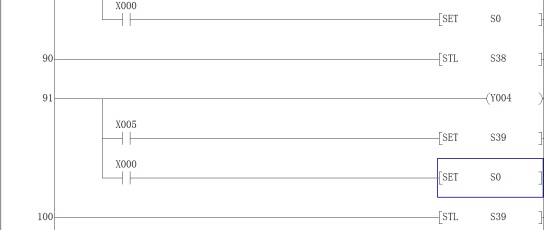
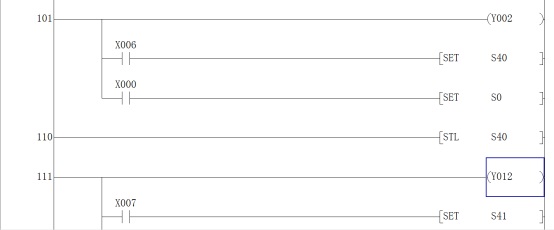
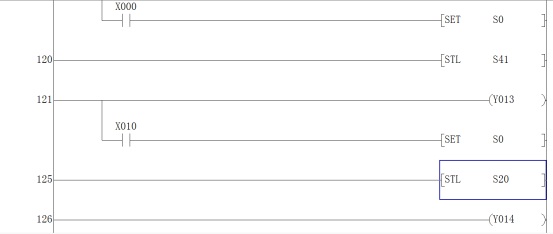
五、軟件編寫與調試 1、自動控制梯形圖 根據自動控制的流程圖與控制要求,自動控制的程序編寫采用步進梯形圖,可以更好地實現控制目,方便控制的設計與調試。
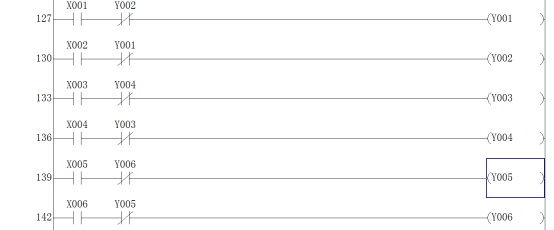
2、手動控制梯形圖 手動的工作方式主要是為了方便調整設備,以及方便單件產品的生產。所謂的手動,就是注塑機的每一個工步都設置一個按鈕,當我們把按鈕按下時機器就會執行該按鈕對應的那一步動作。為了方便操作和實現控制目的,采用順序編程編寫手動控制的梯形圖。 3、程序調試 在可編程控制器實驗箱GL3101A上完成接線后,進行注塑機工作流程的模擬操作,利用按鈕開關代替行程開關,LED燈模擬電磁閥工作狀態,初始狀態注塑機處于原位,按下啟動開關S1,LED燈D1亮起,開始閉模;按下S2模擬閉模終止限位開關,LED燈D2亮起,閉模結束,開始進料;按下S3模擬進料限位開關,LED燈D3亮起,射臺開始前進;按下S4模擬射臺前進限位開關,射臺停止前進,LED燈D4亮起,開啟注射、保壓一檔(高速);定時器T1計時3s后,LED燈D5亮起,開啟注射、保壓二檔(低速);定時器T2計時2s,LED燈D6亮起,開始加冷卻液;定時器T3計時4s后,射臺開始后退,LED燈D7亮起;按下S6模擬射臺后退終止限位開關,LED燈D8亮起,射臺后退結束,開始開模;按下S7模擬開模終止限位開關,LED燈D9亮起,開模完成,頂針開始前進,頂出工件;按下S8模擬頂針前進終止限位開關,LED燈D10亮起,頂針停止前進,取出工件,頂針后退;按下S9模擬頂針后退終止限位開關,頂針停止后退,注塑機復位,完成一個周期的模擬流程
七、總結與心得體會 1、總結 透過這次設計實踐。我學會了plc的基本編程方法,對plc的工作原理和使用方法也有了更深刻的理解。在對理論的運用中,提高了我們的工程素質,在沒有做實踐設計以前,我們對明白的撐握都是思想上的,對一些細節不加重視,當我們把自己想出來的程序與到plc中的時候,問題出現了,不是不能運行,就是運行的結果和要求的結果不相貼合。能過解決一個個在調試中出現的問題,我們對plc的理解得到加強,看到了實踐與理論的差距。 透過合作,我們的合作意識得到加強。合作潛力得到提高。上大學后,很多同學都沒有過深入的交流,在設計的過程中,我們用了分工與合作的方式,每個人互責必須的部分,同時在必須的階段共同討論,以解決分工中個人不能解決的問題,在交流中大家用心發言,和提出意見,同時我們還向別的同學請教。在此過程中,每個人都想自己的方案得到實現,用心向同學說明自己的想法。能過比較選出最好的方案。在這過程也提高了我們的表過潛力。 透過此次,讓我了解了plc梯形圖、指令表、順序功能圖有了更好的了解,也讓我了解了關于plc設計原理。有很多設計理念來源于實際,從中找出最適合的設計方法。 遇到問題和同學互相討論交流。多和同學討論。我們在做設計的過程中要不停的討論問題,這樣,我們能夠盡可能的統一思想,這樣就不會使自己在做的過程中沒有方向,并且這樣也是為了方便最后設計和在一齊。討論不僅僅是一些思想的問題,還能夠深入的討論一些技術上的問題,這樣能夠使自己的處理問題要快一些,少走彎路。多改變自己設計的方法,在設計的過程中最好要不停的改善自己解決問題的方法,這樣能夠方便自己解決問題 在剛拿到時,我先對進行了大致的分析和計劃,考慮到注塑機的工作方式與工作流程,注塑機借助11個電磁閥YV1~YV11完成閉模、進料、加熱、射臺前進、注射保壓高速和低速擋、射臺后退、開模、頂針前進、頂針后退、復位。等工序,是一步一步完成的,所以決定采用順序控制得步進指令進行梯形圖的編程。剛開始時,由于我對注塑機的工作原理不夠理解,工作流程不夠吃透,導致了對行程開關SQ1的狀態沒有把握好,自動控制梯形圖編程時寫錯狀態,后來通過和同學的討論,將其改正過來。在手動控制的編程過程中,犯了線圈重復使用控制的誤,導致手動控制的功能無法實現,之后通過軟件調試和程序監視,完成了對程序的修改,完成了對手動控制的要求。在進行硬件的測試時,發現了,PLC實驗箱輸入模塊的X10 、X11兩個輸入位置互換了,所以在后面的線路連接中,我特別注意了這兩個輸入。通過這次工程,把學過的比較零碎的知識系統化,真正的能夠把學過的知識落到實處,深刻理解了‘實踐才是檢驗真理的唯一標準’這一句真理。所謂學以致用不外乎就是這樣的。 此次設計我們組探討了注塑機的工作原理和工作方式,并從網上收集資料,通過仔細的學習和比較發現,一些注塑機在完成模具注射的時候,產品會出現一些瑕疵,為此我們采用分段注射的方式,改良產品,提高優品率。注塑機借助11個電磁閥YV1~YV11完成閉模、進料、加熱、射臺前進、注射保壓高速和低速擋、射臺后退、開模、頂針前進、頂針后退、復位,由于工作流程是一步一步完成的,為此我們決定采用順序控制得步進指令進行梯形圖的編程。在自動模式開啟運行的過程中,這些步驟的運行需要用到很多行程開關和定時器,在實驗的過程中,資源有限,我們用現有模塊上面的按鈕代替形成開關給PLC一個信號,用LED燈模擬輸出的電磁閥。完成了自動模式的編程之后,我們對其進行改進:在運行過程中中斷并推出和手動控制模式,這些功能可也是的注塑機更加靈活的應用。關于注射過程的分段控制,如何判斷、選擇并切換注射速度和壓力是一個難題,模具的形狀和大小有可能影響到注射的效果,從而影響到產品的質量。由于實驗室的資源有限,于是我們就假設根據工程的經驗,先已知模具注射的最優的注射速度和壓力,通過定時器設定時間,切換注射的速度和壓力,通過這樣的方式來模擬現場的工作流程。 射膠速度與制品質量的密切關系使它成為注塑成型的關鍵參數。通過確定填充速度分段的開始、中間、終點, 并實現一個設置點到另一個設置點的光滑過渡,可以保證穩定的熔體表面速度以制造出期望的分子取問及最小的內應力。我們建議采用以下這種速度分段原則:1)流體表面的速度應該是常數。2)應采用快速射膠防止射膠過程中熔體凍結。3)射膠速度設置應考慮到在臨界區域(如流道)快速充填的同時在入水口位減慢速度。4)射膠速度應該保證模腔填滿后立即停止以防止出現過填充、飛邊及殘余應力。 設定速度分段的依據必須考慮到模具的幾何形狀、其它流動限制和不穩定因素。速度的設定必須對注塑工藝和材料知識有較清楚的認識,否則,制品品質將難以控制。 2、心得體會 這周我們做了基于PLC的塑料注塑成型機。通過對該系統的調試與仿真,其功能基本達到要求。在這短暫的一周里,我深深的感覺到自己所學知識的膚淺和在實際運用中的專業知識的匱乏。本設計以PLC為核心,通過對注塑機控制系統的詳細分析,完成了控制系統的硬件和軟件設計。我主要負責I/O地址分配,硬件設計和程序流程圖的繪制。針對本設計中的注塑機控制系統,設計中的許多功能還有待于擴展、完善。由于時間倉促,知識量有限,設計中也還存在著一些不足,對于設計的整體優化仍需進一步改進。

51hei.png (6.68 KB, 下載次數: 76)
下載附件
2019-12-20 02:36 上傳
完整的Word格式文檔51黑下載地址:
 注塑機plc.rar
(1.25 MB, 下載次數: 77)
注塑機plc.rar
(1.25 MB, 下載次數: 77)
2019-12-19 23:58 上傳
點擊文件名下載附件
下載積分: 黑幣 -5
| 











 QQ好友和群
QQ好友和群 QQ空間
QQ空間 騰訊微博
騰訊微博 騰訊朋友
騰訊朋友 收藏
收藏 淘帖
淘帖 頂
頂 踩
踩

