處理器與外部設備通信的兩種方式:
并行通信:
-傳輸原理:數據各個位同時傳輸。
-優點:速度快
-缺點:占用引腳資源多

串行通信:
-傳輸原理:數據按位順序傳輸。
-優點:占用引腳資源少
-缺點:速度相對較慢

串行通信,按照數據傳送方向,分為:
單工:
數據傳輸只支持數據在一個方向上傳輸

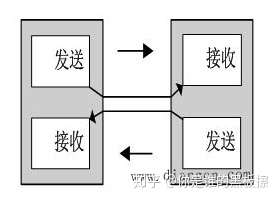
半雙工:
允許數據在兩個方向上傳輸,但是,在某一時刻,只允許數
據在一個方向上傳輸,它實際上是一種切換方向的單工通信;
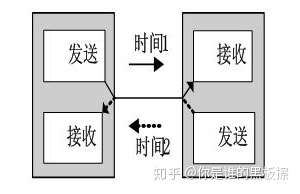
全雙工:
允許數據同時在兩個方向上傳輸,因此,全雙工通信是兩個
單工通信方式的結合,它要求發送設備和接收設備都有獨立
的接收和發送能力。
串行通信的通信方式:
**同步通信:**帶時鐘同步信號傳輸。
如:SPI,IIC通信接口
**異步通信:**不帶時鐘同步信號。
如:UART(通用異步收發器),單總線
常見的串行通信接口:

二、STM32的串口通信接口
UART:通用異步收發器(universal asynchronous receiver and transmitter)
USART:通用同步異步收發器(universal synchronous asynchronous receiver and transmitter)
其中:
通用同步異步收發器(USART)
小容量產品:是指閃存存儲器容量在16K至32K字節之間的STM32F101xx、 STM32F102xx和STM32F103xx微控制器。
中容量產品:是指閃存存儲器容量在64K至128K字節之間的STM32F101xx、 STM32F102xx和STM32F103xx微控制器。
大容量產品:是指閃存存儲器容量在256K至512K字節之間的STM32F101xx和STM32F103xx微控制器。
互聯型產品:是指STM32F105xx和STM32F107xx微控制器。
除非特別說明,本章描述的模塊適用于整個STM32F10xxx微控制器系列。
我使用的是 STM32F105xx,所以是互聯型產品,包含3個USART和2個UART。(USART1/USART2/USART3/UART4/UART5)
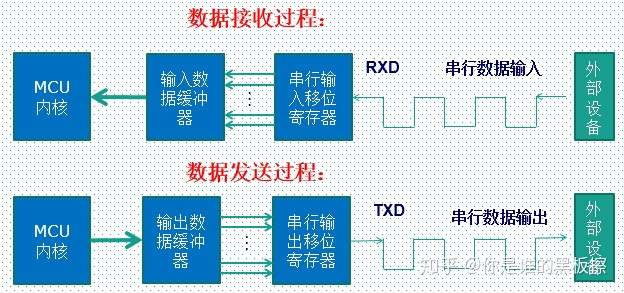
三、UART異步通信方式引腳連接方法
-RXD:數據輸入引腳。數據接收。
-TXD:數據發送引腳。數據發送。
串口交叉線

串口直通線
四、UART異步通信方式特點
● 全雙工的,異步通信
● NRZ標準格式
● 分數波特率發生器系統
─ 發送和接收共用的可編程波特率,最高達4.5Mbits/s
● 可編程數據字長度(8位或9位)
● 可配置的停止位-支持1或2個停止位
● LIN主發送同步斷開符的能力以及LIN從檢測斷開符的能力
─ 當USART硬件配置成LIN時,生成13位斷開符;檢測10/11位斷開符
● 發送方為同步傳輸提供時鐘
● IRDA SIR 編碼器解碼器
─ 在正常模式下支持3/16位的持續時間
● 智能卡模擬功能
─ 智能卡接口支持ISO7816-3標準里定義的異步智能卡協議
─ 智能卡用到的0.5和1.5個停止位
● 單線半雙工通信
● 可配置的使用DMA的多緩沖器通信
─ 在SRAM里利用集中式DMA緩沖接收/發送字節
● 單獨的發送器和接收器使能位
● 檢測標志
─ 接收緩沖器滿
─ 發送緩沖器空
─ 傳輸結束標志
● 校驗控制
─ 發送校驗位
─ 對接收數據進行校驗
● 四個錯誤檢測標志
─ 溢出錯誤
─ 噪音錯誤
─ 幀錯誤
─ 校驗錯誤
● 10個帶標志的中斷源
─ CTS改變
─ LIN斷開符檢測
─ 發送數據寄存器空
─ 發送完成
─ 接收數據寄存器滿
─ 檢測到總線為空閑
─ 溢出錯誤
─ 幀錯誤
─ 噪音錯誤
─ 校驗錯誤
● 多處理器通信 – 如果地址不匹配,則進入靜默模式
● 從靜默模式中喚醒(通過空閑總線檢測或地址標志檢測)
● 兩種喚醒接收器的方式:地址位(MSB,第9位),總線空閑
五、串口通信過程
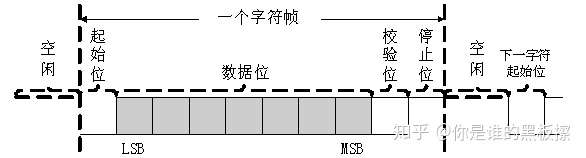
六、STM32串口異步通信需要定義的參數
起始位
數據位(8位或者9位)
奇偶校驗位(第9位)
停止位(1,15,2位)
波特率設置
七、串口配置
串口設置的一般步驟可以總結為如下幾個步驟:
1、串口時鐘使能,GPIO時鐘使能
2、串口復位
3、GPIO端口模式設置
4、串口參數初始化
5、開啟中斷并且初始化NVIC(如果需要開啟中斷才需要這個步驟)
6、使能串口
7、編寫中斷處理函數
下面, 我們就簡單介紹下這幾個與串口基本配置直接相關的幾個固件庫函數。 這些函數和定義主要分布在 stm32f10x_usart.h 和stm32f10x_usart.c 文件中。
1.串口時鐘使能。 串口是掛載在 APB2 下面的外設,所以使能函數為:
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1);
1
2.串口復位。 當外設出現異常的時候可以通過復位設置,實現該外設的復位,然后重新配置這個外設達到讓其重新工作的目的。一般在系統剛開始配置外設的時候,都會先執行復位該外設的操作。 復位的是在函數 USART_DeInit()中完成:
void USART_DeInit(USART_TypeDef* USARTx);//串口復位
1
比如我們要復位串口 1,方法為:
USART_DeInit(USART1); //復位串口 1
1
3.串口參數初始化。 串口初始化是通過 USART_Init()函數實現的,
void USART_Init(USART_TypeDef* USARTx, USART_InitTypeDef* USART_InitStruct);
1
這個函數的第一個入口參數是指定初始化的串口標號,這里選擇 USART1。
第二個入口參數是一個 USART_InitTypeDef 類型的結構體指針, 這個結構體指針的成員變量用來設置串口的一些參數。 一般的實現格式為:
USART_InitStructure.USART_BaudRate = bound; //波特率設置;
USART_InitStructure.USART_WordLength = USART_WordLength_8b;//字長為 8 位數據格式
USART_InitStructure.USART_StopBits = USART_StopBits_1; //一個停止位
USART_InitStructure.USART_Parity = USART_Parity_No; //無奇偶校驗位
USART_InitStructure.USART_HardwareFlowControl
= USART_HardwareFlowControl_None; //無硬件數據流控制
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx; //收發模式
USART_Init(USART1, &USART_InitStructure); //初始化串口
從上面的初始化格式可以看出初始化需要設置的參數為:波特率,字長,停止位,奇偶校驗位,硬件數據流控制,模式(收,發)。 我們可以根據需要設置這些參數。
4.數據發送與接收。 STM32 的發送與接收是通過數據寄存器 USART_DR 來實現的,這是一個雙寄存器,包含了 TDR 和 RDR。當向該寄存器寫數據的時候,串口就會自動發送,當收到數據的時候,也是存在該寄存器內。
STM32 庫函數操作 USART_DR 寄存器發送數據的函數是:
void USART_SendData(USART_TypeDef* USARTx, uint16_t Data);
通過該函數向串口寄存器 USART_DR 寫入一個數據。
STM32 庫函數操作 USART_DR 寄存器讀取串口接收到的數據的函數是:
uint16_t USART_ReceiveData(USART_TypeDef* USARTx);
通過該函數可以讀取串口接受到的數據。
5.串口狀態。 串口的狀態可以通過狀態寄存器 USART_SR 讀取。 USART_SR 的各位描述如圖 9.1.1 所示:

這里我們關注一下兩個位,第 5、 6 位 RXNE 和 TC。
RXNE(讀數據寄存器非空),當該位被置 1 的時候,就是提示已經有數據被接收到了,并且可以讀出來了。這時候我們要做的就是盡快去讀取 USART_DR,通過讀 USART_DR 可以將該位清零,也可以向該位寫 0,直接清除。
TC(發送完成),當該位被置位的時候,表示 USART_DR 內的數據已經被發送完成了。如果設置了這個位的中斷,則會產生中斷。該位也有兩種清零方式: 1)讀 USART_SR,寫USART_DR。 2)直接向該位寫 0。
狀態寄存器的其他位我們這里就不做過多講解,大家需要可以查看中文參考手冊。
在我們固件庫函數里面,讀取串口狀態的函數是:
FlagStatus USART_GetFlagStatus(USART_TypeDef* USARTx, uint16_t USART_FLAG);
這個函數的第二個入口參數非常關鍵, 它是標示我們要查看串口的哪種狀態, 比如上面講解的RXNE(讀數據寄存器非空)以及 TC(發送完成)。例如我們要判斷讀寄存器是否非空(RXNE), 操作庫函數的方法是:
USART_GetFlagStatus(USART1, USART_FLAG_RXNE);
我們要判斷發送是否完成(TC),操作庫函數的方法是:
USART_GetFlagStatus(USART1, USART_FLAG_TC);
這些標識號在 MDK 里面是通過宏定義定義的:
#define USART_IT_PE ((uint16_t)0x0028)
#define USART_IT_TXE ((uint16_t)0x0727)
#define USART_IT_TC ((uint16_t)0x0626)
#define USART_IT_RXNE ((uint16_t)0x0525)
#define USART_IT_IDLE ((uint16_t)0x0424)
#define USART_IT_LBD ((uint16_t)0x0846)
#define USART_IT_CTS ((uint16_t)0x096A)
#define USART_IT_ERR ((uint16_t)0x0060)
#define USART_IT_ORE ((uint16_t)0x0360)
#define USART_IT_NE ((uint16_t)0x0260)
#define USART_IT_FE ((uint16_t)0x0160)
6.串口使能。 串口使能是通過函數 USART_Cmd()來實現的,這個很容易理解,使用方法是:
USART_Cmd(USART1, ENABLE); //使能串口
7.開啟串口響應中斷。 有些時候當我們還需要開啟串口中斷,那么我們還需要使能串口中斷,使能串口中斷的函數是:
void USART_ITConfig(USART_TypeDef* USARTx, uint16_t USART_IT,
FunctionalState NewState)
這個函數的第二個入口參數是標示使能串口的類型, 也就是使能哪種中斷, 因為串口的中斷類型有很多種。 比如在接收到數據的時候(RXNE 讀數據寄存器非空),我們要產生中斷,那么我們開啟中斷的方法是:
USART_ITConfig(USART1, USART_IT_RXNE, ENABLE);//開啟中斷,接收到數據中斷
我們在發送數據結束的時候(TC, 發送完成) 要產生中斷,那么方法是:
USART_ITConfig(USART1, USART_IT_TC, ENABLE);
8.獲取相應中斷狀態。 當我們使能了某個中斷的時候,當該中斷發生了,就會設置狀態寄存器中的某個標志位。 經常我們在中斷處理函數中,要判斷該中斷是哪種中斷,使用的函數是:
ITStatus USART_GetITStatus(USART_TypeDef* USARTx, uint16_t USART_IT)
比如我們使能了串口發送完成中斷,那么當中斷發生了, 我們便可以在中斷處理函數中調用這個函數來判斷到底是否是串口發送完成中斷,方法是:
USART_GetITStatus(USART1, USART_IT_TC)
返回值是 SET,說明是串口發送完成中斷發生。
八、串口程序完整代碼
參看:USART串口通信配置
#include "stm32f10x.h"
u8 Uart1_Get_Flag = 0;
// 串口初始化函數
void My_USART1_Init(void)
{
GPIO_InitTypeDef GPIO_InitStrue;
USART_InitTypeDef USART_InitStrue;
NVIC_InitTypeDef NVIC_InitStrue;
// 1,使能GPIOA,USART1時鐘
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1,ENABLE);
// 2,設置PGIO工作模式-PA9 PA10復用為串口1
GPIO_InitStrue.GPIO_Mode=GPIO_Mode_AF_PP;//復用推挽輸出
GPIO_InitStrue.GPIO_Pin=GPIO_Pin_9;//USART1_TX PA.9
GPIO_InitStrue.GPIO_Speed=GPIO_Speed_10MHz;
GPIO_Init(GPIOA,&GPIO_InitStrue); //初始化 GPIOA.9
GPIO_InitStrue.GPIO_Mode=GPIO_Mode_IN_FLOATING;//浮空輸入
GPIO_InitStrue.GPIO_Pin=GPIO_Pin_10;//USART1_RX PA.10
GPIO_InitStrue.GPIO_Speed=GPIO_Speed_10MHz;
GPIO_Init(GPIOA,&GPIO_InitStrue); //初始化 GPIOA.10
// 3,串口1初始化配置
USART_InitStrue.USART_BaudRate=115200;//波特率設置
USART_InitStrue.USART_HardwareFlowControl=USART_HardwareFlowControl_None;//無硬件數據流控制
USART_InitStrue.USART_Mode=USART_Mode_Tx|USART_Mode_Rx;//收發模式
USART_InitStrue.USART_Parity=USART_Parity_No; //無奇偶校驗位
USART_InitStrue.USART_StopBits=USART_StopBits_1; //一個停止位
USART_InitStrue.USART_WordLength=USART_WordLength_8b;//字長為 8 位
USART_Init(USART1,&USART_InitStrue);//初始化串口
// 4,打開串口1
USART_Cmd(USART1,ENABLE);//使能串口
// 5,使能串口1中斷-接收數據完成中斷
USART_ITConfig(USART1,USART_IT_RXNE,ENABLE);//開啟中斷
// 6,設置中斷優先級-主函數中設置中斷優先級分組
NVIC_InitStrue.NVIC_IRQChannel=USART1_IRQn;
NVIC_InitStrue.NVIC_IRQChannelCmd=ENABLE;//IRQ 通道使能
NVIC_InitStrue.NVIC_IRQChannelPreemptionPriority=1;//搶占優先級 1
NVIC_InitStrue.NVIC_IRQChannelSubPriority=1;//子優先級 1
NVIC_Init(&NVIC_InitStrue);//中斷優先級初始化
}
void USART1_Puts(char * str)
{
while(*str)
{
USART_SendData(USART1, *str++);
while(USART_GetFlagStatus(USART1, USART_FLAG_TXE) == RESET);
}
}
// 中斷服務函數
void USART1_IRQHandler(void)
{
u8 res;
if(USART_GetITStatus(USART1,USART_IT_RXNE))// 接收到數據
{
USART_ClearITPendingBit(USART1,USART_IT_RXNE);
res= USART_ReceiveData(USART1); // 獲得串口1接收到的數據
Uart1_Get_Flag=1;
}
}
// 主函數
int main(void)
{
// 設置中斷優先級分組位2 - 2位搶占2位相應
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
// 調用函數 初始化USART1相關引腳配置
My_USART1_Init();
if (Uart1_Get_Flag){
Uart1_Get_Flag = 0;
USART1_Puts(res);
}
return 0;
}
}
九、串口其他需要了解的
串口相關寄存器
上面串口部分其實基本上已經講完了。
但是我們用的庫函數版本是3.5的。在串口配置中還要配置USART 時鐘的。
首先看下串口相關的寄存器:
USART_SR 狀態寄存器
USART_DR 數據寄存器
USART_BRR 波特率寄存器
USART_CR1 控制寄存器
具體的配置看STM32中文參考手冊了解一下,直接用串口庫函數就好了。
十、串口操作相關庫函數
獲取狀態標志位函數-操作USART_SR寄存器
// 獲取狀態標志位
FlagStatus USART_GetFlagStatus(USART_TypeDef* USARTx, uint16_t USART_FLAG);
// 清除狀態標志位
void USART_ClearFlag(USART_TypeDef* USARTx, uint16_t USART_FLAG);
// 獲取中斷狀態標志位
ITStatus USART_GetITStatus(USART_TypeDef* USARTx, uint16_t USART_IT);
// 清除中斷狀態標志位
void USART_ClearITPendingBit(USART_TypeDef* USARTx, uint16_t USART_IT);
接收發送數據函數-操作USART_DR寄存器
// 發送數據到串口(通過寫USART_DR寄存器發送數據)
void USART_SendData(USART_TypeDef* USARTx, uint16_t Data);
// 接收數據(從USART_DR寄存器讀取接收到的數據)
uint16_t USART_ReceiveData(USART_TypeDef* USARTx);
串口配置函數
// 串口初始化:波特率,數據字長,奇偶校驗,硬件流控以及收發使能
void USART_Init(USART_TypeDef* USARTx, USART_InitTypeDef* USART_InitStruct);
// 使能串口
void USART_Cmd(USART_TypeDef* USARTx, FunctionalState NewState);
// 使能相關中斷
void USART_ITConfig(USART_TypeDef* USARTx, uint16_t USART_IT, FunctionalState NewState);
我們用的庫函數V3.5里面還有:
串口復位
void USART_DeInit(USART_TypeDef* USARTx)
串口時鐘的初始化:
void USART_ClockInit(USART_TypeDef* USARTx, USART_ClockInitTypeDef* USART_ClockInitStruct)
串口通信DMA中斷
void USART_DMACmd(USART_TypeDef* USARTx, uint16_t USART_DMAReq, FunctionalState NewState)
所以除了上述的串口配置,還可以添加如下的配置:
USART_InitTypeDef USART_InitStrue;
USART_ClockInitTypeDef USART_CLK_InitStrue;
USART_InitStrue.USART_BaudRate = baud_rate;//波特率設置
USART_InitStrue.USART_WordLength = USART_WordLength_8b;//字長為 8 位
USART_InitStrue.USART_StopBits = USART_StopBits_1;//一個停止位
USART_InitStrue.USART_Parity = USART_Parity_No ;//無奇偶校驗位
USART_InitStrue.USART_HardwareFlowControl = USART_HardwareFlowControl_None;//無硬件數據流控制
USART_InitStrue.USART_Mode = USART_Mode_Rx | USART_Mode_Tx;//收發模式
USART_CLK_InitStrue.USART_Clock = USART_Clock_Disable;//USART 時鐘失能
USART_CLK_InitStrue.USART_CPOL = USART_CPOL_Low;//SCLK引腳上時鐘輸出的極性
USART_CLK_InitStrue.USART_CPHA = USART_CPHA_2Edge;//SLCK引腳上時鐘輸出的相位
USART_CLK_InitStrue.USART_LastBit = USART_LastBit_Disable;//是否在同步模式下
USART_Init(USART1,&USART_InitStrue);//初始化串口
USART_ClockInit(USART1, &USART_CLK_InitStrue);//初始化USART時
PS:剛開始有點不太理解,為什么要用到串口時鐘。
回顧了一下上面講到的:
我使用的是 STM32F105xx,所以是互聯型產品,包含3個USART和2個UART。(USART1/USART2/USART3/UART4/UART5)
UART:通用異步收發器,如RS232
USART:通用同步異步收發器,如 IIC通信, SPI通信
同步通信,例如IIC通信是需要時鐘的。
我又有疑問了?
那如果UART和USART都不使用時鐘,兩者配置有什么區別?
上一講講到APB的時候有提到:
APB1(低速)、APB2(高速)
APB2****負責 AD,I/O,高級TIM,串口1。
APB1負責 DA,USB,SPI,I2C,CAN,串口2345,普通TIM,PWR
說明:
由于UART的TX和RX和AFIO都掛在APB2橋上,因此采用固件庫函數RCC_APB2PeriphClockCmd()進行初始化。UARTx需要分情況討論,如果是UART1,則掛在APB2橋上,因此采用RCC_APB2PeriphClockCmd()進行初始化,其余的UART2~5均掛在APB1上。
正好對應了網上看的這段話:
UART1的時鐘:PCLK2(高速);
UART2、UART3、UART4、UART5的時鐘:PCLK1(低速)。
下面為手冊上USART和UART配置的區別:


我們程序的配置如下:
void Bsp_Usart_Init(u8 USART_ID, u32 baud_rate)
{
GPIO_InitTypeDef gpio_init;
USART_InitTypeDef usart_init;
USART_ClockInitTypeDef usart_clk_init;
/* ----------------- INIT USART STRUCT ---------------- */
usart_init.USART_BaudRate = baud_rate;
usart_init.USART_WordLength = USART_WordLength_8b;
usart_init.USART_StopBits = USART_StopBits_1;
usart_init.USART_Parity = USART_Parity_No ;
usart_init.USART_HardwareFlowControl = USART_HardwareFlowControl_None;
usart_init.USART_Mode = USART_Mode_Rx | USART_Mode_Tx;
usart_clk_init.USART_Clock = USART_Clock_Disable;
usart_clk_init.USART_CPOL = USART_CPOL_Low;
usart_clk_init.USART_CPHA = USART_CPHA_2Edge;
usart_clk_init.USART_LastBit = USART_LastBit_Disable;
/*-------------------USART1 用作GSM通信 -----------*/
if (USART_ID == DEF_USART_1)
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1, ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO,ENABLE);
GPIO_PinRemapConfig(GPIO_Remap_USART1,ENABLE); //通訊角映射到PB6,PB7
/* Configure GPIOA.9 as push-pull USART1-TX */
gpio_init.GPIO_Pin = BSP_GPIOB_USART1_TX_PINS;
gpio_init.GPIO_Speed = GPIO_Speed_10MHz;
gpio_init.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_Init(GPIOB, &gpio_init);
/* Configure GPIOA.10 as input floating USART1-RX */
gpio_init.GPIO_Pin = BSP_GPIOB_USART1_RX_PINS;
gpio_init.GPIO_Mode = GPIO_Mode_IN_FLOATING;
//gpio_init.GPIO_Mode = GPIO_Mode_IPU;
GPIO_Init(GPIOB, &gpio_init);
/* ------------------ SETUP USART1 -------------------- */
USART_Init(USART1, &usart_init);
USART_ClockInit(USART1, &usart_clk_init);
// Clean interrupt flag, and disable txd & rxd interrupt
USART_ITConfig(USART1, USART_IT_RXNE, DISABLE);
USART_ITConfig(USART1, USART_IT_TXE, DISABLE);
USART_ClearITPendingBit(USART1, USART_IT_RXNE);
USART_ClearITPendingBit(USART1, USART_IT_TXE);
USART_GetFlagStatus(USART1, USART_FLAG_TC);/* 記得加上,不先讀一下第一字節會發不出去,*/
USART_Cmd(USART1, ENABLE);
}
else if (USART_ID == DEF_USART_2)
{
RCC_APB1PeriphClockCmd(RCC_APB1Periph_USART2, ENABLE);
/* ----------------- SETUP USART2 GPIO ---------------- */
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);
/* Configure GPIOA.2 as push-pull */
gpio_init.GPIO_Pin = GPIO_Pin_2;
gpio_init.GPIO_Speed = GPIO_Speed_50MHz;
gpio_init.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_Init(GPIOA, &gpio_init);
/* Configure GPIOA.3 as input floating */
gpio_init.GPIO_Pin = GPIO_Pin_3;
gpio_init.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_Init(GPIOA, &gpio_init);
/* ------------------ SETUP USART2 -------------------- */
USART_Init(USART2, &usart_init);
//USART_ClockInit(USART2, &usart_clk_init);
// Clean interrupt flag, and disable txd & rxd interrupt
USART_ITConfig(USART2, USART_IT_RXNE, DISABLE);
USART_ITConfig(USART2, USART_IT_TXE, DISABLE);
USART_ClearITPendingBit(USART2, USART_IT_RXNE);
USART_ClearITPendingBit(USART2, USART_IT_TXE);
USART_GetFlagStatus(USART2, USART_FLAG_TC);/* 記得加上,不先讀一下第一字節會發不出去,*/
USART_Cmd(USART2, ENABLE);
}
else if (USART_ID == DEF_USART_3)
{
RCC_APB1PeriphClockCmd(RCC_APB1Periph_USART3, ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE);
/* Configure GPIOB.10 as push-pull */
gpio_init.GPIO_Pin = GPIO_Pin_10;
gpio_init.GPIO_Speed = GPIO_Speed_50MHz;
gpio_init.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_Init(GPIOB, &gpio_init);
gpio_init.GPIO_Pin = GPIO_Pin_11;
gpio_init.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_Init(GPIOB, &gpio_init);
/* ------------------ SETUP USART3 -------------------- */
USART_Init(USART3, &usart_init);
USART_ClockInit(USART3, &usart_clk_init);
// Clean interrupt flag, and disable txd & rxd interrupt
USART_ITConfig(USART3, USART_IT_RXNE, DISABLE);
USART_ITConfig(USART3, USART_IT_TXE, DISABLE);
USART_ClearITPendingBit(USART3, USART_IT_RXNE);
USART_ClearITPendingBit(USART3, USART_IT_TXE);
USART_GetFlagStatus(USART3, USART_FLAG_TC);/* 記得加上,不先讀一下第一字節會發不出去,*/
USART_Cmd(USART3, ENABLE);
}
//--------------------UART4 打印 調試窗口
else if (USART_ID == DEF_UART_4)
{
RCC_APB1PeriphClockCmd(RCC_APB1Periph_UART4, ENABLE);
/* ----------------- SETUP USART4 GPIO ---------------- */
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOC, ENABLE);
/* Configure GPIOC.10 as push-pull */
gpio_init.GPIO_Pin = GPIO_Pin_10;
gpio_init.GPIO_Speed = GPIO_Speed_50MHz;
gpio_init.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_Init(GPIOC, &gpio_init);
/* Configure GPIOC.11 as input floating */
gpio_init.GPIO_Pin = GPIO_Pin_11;
gpio_init.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_Init(GPIOC, &gpio_init);
/* ------------------ SETUP UART4 -------------------- */
USART_Init(UART4, &usart_init);
USART_ClockInit(UART4, &usart_clk_init);
// Clean interrupt flag, and disable txd & rxd interrupt
USART_ITConfig(UART4, USART_IT_RXNE, DISABLE);
USART_ITConfig(UART4, USART_IT_TXE, DISABLE);
USART_ClearITPendingBit(UART4, USART_IT_RXNE);
USART_ClearITPendingBit(UART4, USART_IT_TXE);
USART_GetFlagStatus(UART4, USART_FLAG_TC);/* 記得加上,不先讀一下第一字節會發不出去,*/
USART_Cmd(UART4, ENABLE);
}
}
十一、初始化GPIO的工作模式
如果關注上面的GPIO配置,你可以發現:
TX的GPIO工作模式為:GPIO_Mode_AF_PP;//復用推挽輸出
RX的GPIO工作模式為:GPIO_Mode_IN_FLOATING;//浮空輸入
這是為什么呢?通過查找STM32中文參考手冊 外設的GPIO配置來確定:
總結:
STM32的串口部分,到此講完了。
基本上,配置部分都是固定套路,只要往上套就可以了。
其實有時間,能總結一下挺好的。就好比之前這個配置可能照貓畫虎套路一下就可以了。但是為什么要這么配置?如果不是為了寫這篇文章,我是不會看手冊,更不會知道的。
|









 QQ好友和群
QQ好友和群 QQ空間
QQ空間 騰訊微博
騰訊微博 騰訊朋友
騰訊朋友 收藏
收藏 淘帖
淘帖 頂
頂 踩
踩

