|
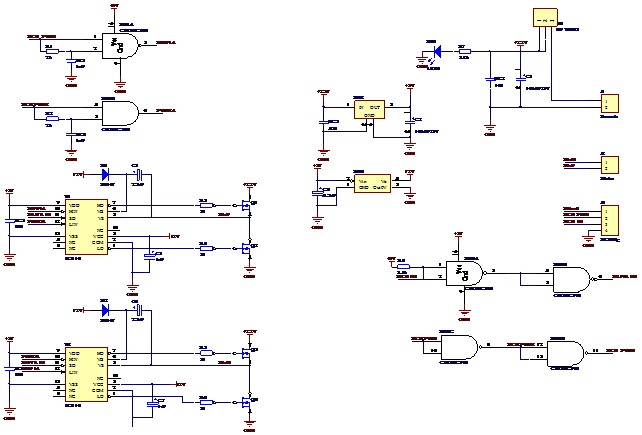
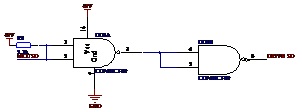
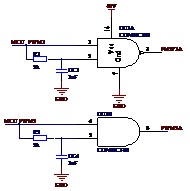
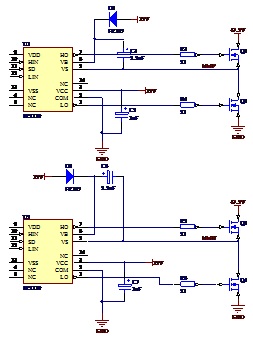
1.1小車驅動電路的功能需求分析 本次設計主要用于驅動小車的前進,后退功能。驅動電路主要包括直流電源模塊、封鎖信號處理模塊、PWM信號處理模塊、死區生成時間模塊、MOSFET驅動模塊、H橋主電路模塊六個模塊組成。直流電源模塊是指從J1接入電源產生分別為7.2V,5V,12V的電源。封鎖信號處理模塊是指輸入MCU SD信號,經過兩個與非門輸出幅值為5V的同相位SD信號。PWM信號處理模塊是指MCU PWM信號經過兩個與非門分別產生幅值為5V相位互補的MCU PWM1與MCU PWM2信號。死區生成時間模塊是指由RC組成的充放電電路與PWM信號連接與門,產生與原信號延遲輸入的的相位關系。MOSFET驅動模塊主要由PWM1A與PWM2A為IR2110輸入信號,驅動MOSFET導通或截至。H橋主電路模塊主要由四個MOSFET組成,在PWM1A為高電平時Q1與Q4導通,PWM2A為高電平時Q2與Q3導通。 1.2電路原理圖設計 1.2電路原理圖總設計圖
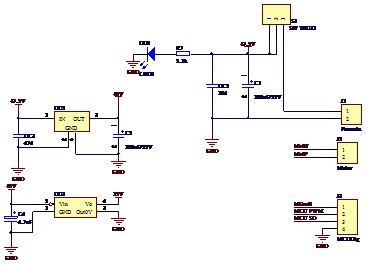
1.2.1直流電源模塊
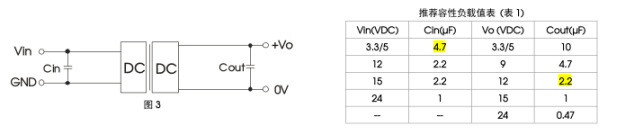
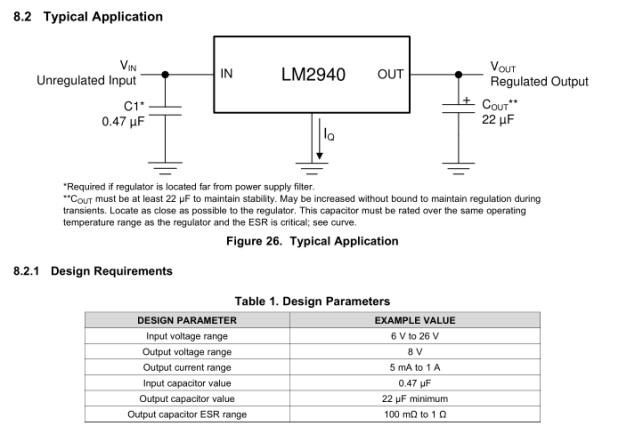
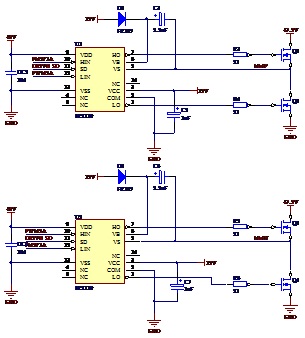
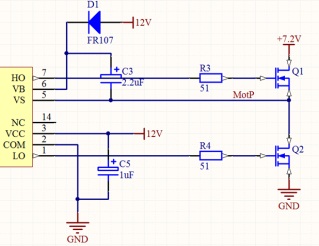
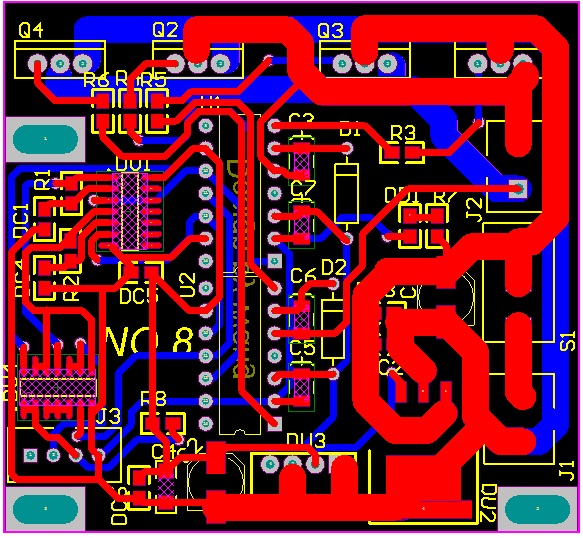
直流電源模塊是指從J1接入直流電源經過電容C1與DC2濾波,輸出7.2V電源,經過電阻R7和發光LED接地,顯示通電是否正常。7.2V電源經濾波電容DC3接入LM2940S-5.0芯片產生5V電源,5V電源經過C2,DC5,DC6電容濾波給IR2110驅動芯片與CD74HCT00邏輯芯片供電,5V經過C4電容濾波接入BO512S_1WR2芯片產生12V電壓,12V電源經過C5,C7濾波為自舉電容充電及為IR2110提供VCC電壓。由圖中資料顯示可以看出,在LM2940芯片中輸入端部份濾波電容為0.47uF,輸出端最小為22uF,在這里我們選用100uF。在B_D-1WR2芯片中,輸入端部份濾波電容為4.7uF。 1.2.2信號封鎖信號處理模塊 信號封鎖信號處理模塊主要包括從單片機輸出的MCU SD封鎖信號,輸入到CD74HCT00邏輯芯片,經過兩個與非門,產生與輸入信號形狀相同但幅值為5V的DRIVE SD信號。不直接輸入到IR2110而是先經過與非門的原因是從單片機輸出的PWM信號幅值為3.3V,不足以驅動IR2110,通過與非門提高其幅值。在電機電流過大或電機非正常運行時,由單片機發出封鎖處理信號,通過IR2110芯片關閉PWM信號輸出,制停電機,避免損壞電機及電路。 1.2.3輸入PWM信號處理模塊 輸入PWM信號處理模塊主要包括從單片機輸出的MCU PWM信號輸入到CD74HCT00邏輯芯片中,經過一個與非門產生與輸入相位相反幅值為5V的MCU PWM2信號,再經過一個與非門產生一個與輸入信號相位相同的幅值為5V的MCU PWM1信號。通過與非門產生PWM信號的原因之一產生相位互補的兩路PWM信號,原因之二與封鎖信號處理模塊類似,由于從單片機輸出的PWM信號幅值僅為3.3V,不足以驅動IR2110芯片,通過與非門提高其幅值。 1.2.3死區生成時間模塊 死區生成時間模塊主要包括由CD74HCT08芯片構成,由RC組成的充放電電路與PWM信號連接與門,產生與原信號延遲輸入的的相位關系,延遲時間即為死區時間,防止上下橋臂同時導通,導致電源短路。 死區時間計算如下:  (1) (1) (2) 已知死區時間t為500-900ns,  ,查手冊知  ,τ為978-1761.8,查手冊可知CD74HCT08輸入電流最大為4mA,計算可得R最小為1.25KΩ,取R為2KΩ,由 計算可得,C取1nF最為合適。此時死區時間大概為1000ns左右。 1.2.4 MOSFET驅動模塊 MOSFET驅動模塊主要利用邏輯芯片CD74HCT08產生的兩路相位互補的PWM信號輸入到HIN引腳與LIN引腳作為IR2110的輸入信號;CD74HCT00產生的封鎖信號DRIVE SD控制芯片IR2110的工作狀態。正常工作狀態時,HO與LO輸出相應PWM信號驅動MOSFET開關。封鎖狀態時,HO與LO無輸出。 IR2110主要引腳功能如下 Vb,Vs:提供高壓端供電 HO:高壓端驅動輸出 LO:低壓端驅動輸出 VCC,COM:提供低壓端供電 HIN:邏輯高端輸出 LIN:邏輯低端輸出 IR2110工作原理如下: 當HIN為高電平時,V1管開通,V2管關斷,VC3加到Q1的柵極和源極之間,C3通過V1,R3和柵極和源極形成回路放電,這時C3就相當于一個電壓源,從而使Q1導通。由于LIN與HIN是一對互補輸入信號,所以此時LIN為低電平,V3關斷,V4導通,這時聚集在Q2柵極和源極的電荷在芯片內部通過R4迅速對地放電,由于死區時間影響使Q2在Q1開通之前迅速關斷。 當HIN為低電平時,V1關斷,V2導通,這時聚集在Q1柵極和源極的電荷在芯片內部通過R1迅速放電使Q1關斷。經過短暫的死區時間LIN為高電平,V3導通,V4關斷使VCC經過R4和S2的柵極和源極形成回路,使Q2開通。在此同時VCC經自舉二極管,C3和Q2形成回路,對C1進行充電,迅速為C1補充能量,如此循環反復。 自舉電容計算如下: 自舉電容必須能提供不低于MOSFET管柵極電荷導通所需的電荷,并且在高端主開關器件開通期間保持其電壓。工程估算公式如下: 其中:查手冊知  -MOSFET門極電荷nC;  -充電電源電壓為12V;  -下半橋MOSFET導通柵極電壓查手冊知為2.2V;  -  與  之間的最小電壓查手冊知為7.5V;  -自舉快恢復二極管的正相管壓降為1.3V。 帶入數據得: 工程上,再保留一定的余量,取估值的2-3倍。  =500nF。 自舉電阻的估算: 自舉電阻  應滿足: 查IR2110數據手冊t=10ns 工程上,再取估算值的2倍左右,  1.2.5 H橋主電路模塊 H橋主電路模塊主要由4個MOSFET構成,電源電壓為7.2V,由芯片IR2110輸出的PWM波控制管子導通與關斷,Q1,Q4所加PWM信號相同,Q2,Q3所加PWM信號相同,兩路信號相位互補(不考慮死區時間)。 1.3 PCB圖繪制 (1)新建一個文件夾,創建工程,保存工程。添加原理圖文件與PCB文件,保存文件到目標文件夾下。 (2)繪制原理圖。在元件庫中找到相應元件放置并連接,模塊連接可使用網絡標號。在畫原理圖時,如果沒有的器件根據芯片說明書自行設計元件庫文件或是封裝庫文件。所有元件完成放置,標好原件值并連接好后,可利用自動標號功能對所有原件進行標號。對所有元件逐一添加封裝,并確定所有原件PCB封裝正確。檢查元件之間的是否正確連接以及是否有虛連。可用compile document 功能檢測部分錯誤。 (3)畫PCB圖。添加PCB文件。首先設置原點,設置規則線寬為30mil,然后把層切換到Keep out layer從原點畫一個長為2550mil寬為1800mil的范圍。然后確定PCB圖板的大小,板長設置為2550mil,板寬設置為3000mil。對長度進行適當放寬。接著進行打孔,孔的外部矩形尺寸長設置為330mil,寬設置為200mil,內部槽的長度設置為290mil,線寬設置為130mil。然后進行手動布局,手動布局一般按照先大后小的原則擺放,然后按照在周圍的元件放在其周圍,通過旋轉元件使元件之間的線最短。布局好所有原件后開始手動布線,與電動機直接相連的MOTN與MOTP,以及直接與MOSFET相連的7.2V與GND線的需要流過大電流的必須使用120mil線寬,其余用線寬30mil布線。完全布線后可進行DRC電氣檢查,檢測無誤后對大電流線路進行開窗,然后對頂層跟底層進行地網絡覆銅,最后確定板子大小。
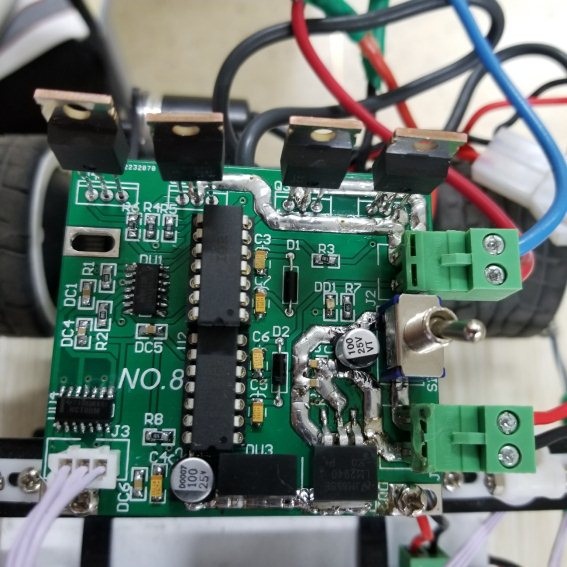
2.1電路板元件焊接 電路板焊接要依照先小后大先低后高的順序,在焊接有鍍錫的地方時需要在周圍先鍍錫在焊接焊錫盡量少一點避免虛焊。有極性的元件一定要先確定好極性,再進行焊接。烙鐵頭如果沾錫可以沾下松香,讓錫快速流下。表貼芯片焊的時候可以先在各引腳點上一定錫,然后把表貼芯片放在上面,用烙鐵頭依次按壓各引腳使錫融化,與引腳相接。注意一定要確保每一個引腳都按壓到。避免虛焊。
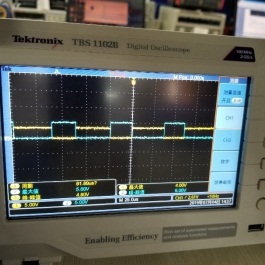
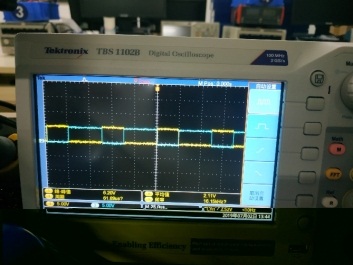
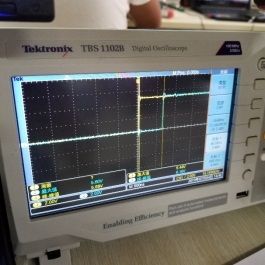
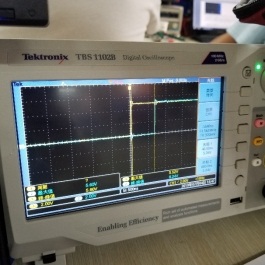
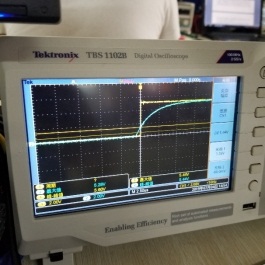
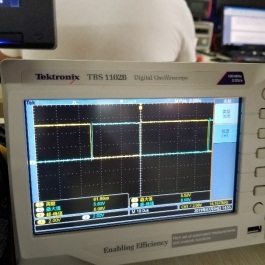
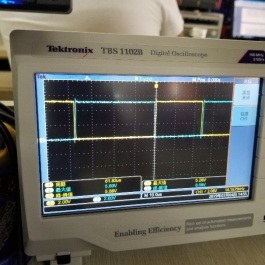
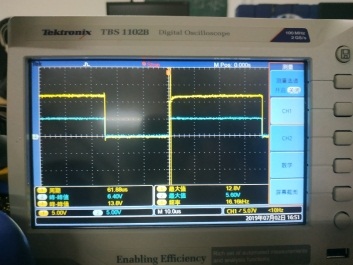
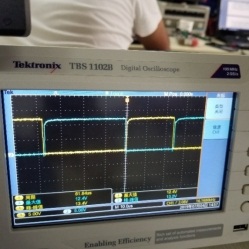
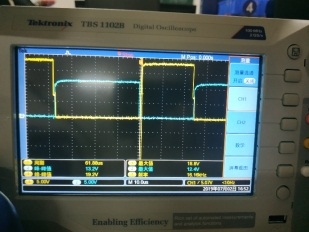
2.2波形調試 2.2.1直流電源模塊 用萬用表的電阻檔,確認鈕子開關處于斷開狀態。將小車電池連線接入驅動電路板。用萬用表的直流電壓檔,確認電路板電池接線端子處的電壓為7.2V,且極性正確。撥動鈕子開關,通電,發光二極管亮。用示波器Ch1依次測LM2940S-5.0的1引腳與3引腳,觀察其波形,均為平直波形,1引腳電壓值為7.2V左右,3引腳電壓值為5V左右,證明LM2940-5.0工作正常。 用Ch1依次測B0512S-1WR2的2引腳與4引腳,觀察其波形,均為平直波形,2引腳電壓值為5V左右,4引腳電壓值為12V左右,證明B0512S-1WR2工作正常。 2.2.2 PWM信號處理模塊 來自單片機的MCU PWM輸入信號、MCU SD封鎖信號通過CD74HCT00芯片至驅動電路板。修改單片機程序,使其持續輸出固定占空比為60%的PWM信號給驅動電路。下載程序,運行。用Ch1測芯片輸入端(即U4A的9引腳),Ch2依次測第一個與非門的輸出(即U4A的8引腳)、第二個與非門的輸出(即U4A的11引腳),觀察波形,對比所得第一個與非門輸出PWM信號與輸入信號MCU_PWM之間的相位相反幅值升至5V,第二個與非門輸出PWM信號與輸入信號MCU_PWM之間的相位相同且幅值至5V,證明與非門工作正常。 用Ch1測第一個與非門(U4A的8引腳)的輸出、Ch2測第二個與非門(U4A的11引腳)的輸出,觀察兩路為互補的PWM控制信號,幅值為5V。 2.2.3封鎖信號處理單元 來自單片機的MCU SD輸入信號、MCU SD封鎖信號通過CD74HCT00芯片至驅動電路板。修改單片機程序,使其持續輸出固定占空比為60%的PWM信號給驅動電路。下載程序,運行。用Ch1測芯片輸入端(即U4A的1引腳),Ch2測第二個與非門的輸出(即U4A的6引腳),觀察波形,對比所得SD信號與輸入信號MCU SD之間相位相同。 2.2.4死區生成時間模塊 死區生成時間模塊主要由CD74HCT08芯片構成,由RC組成的充放電電路與PWM信號連接與門。用Ch1測與門輸入端(即U1A的1引腳)的PWM信號,Ch2測與門輸出端(即U1A的3引腳)的信號。測量兩個信號上升沿之間的時間差(即死區時間)。死區時間為640ns,滿足500到900范圍。對另一路PWM信號,重復上述操作。死區時間為620ns,滿足要求。 用Ch1測與門輸出端(即U1A的3引腳)的PWM信號,Ch2測與門連接RC的輸入端信號(即U1A的1引腳)。由該波形,確定使得與門輸出電平翻轉電壓值為1.4V。有設計圖可知,在翻轉電壓為2V時死區時間為1000ns左右,由于實際翻轉電壓為1.4V,因此死區時間比設計的要短,為640ns。用Ch1測第一個與門的輸出(即U1A的3引腳)、Ch2測第二個與門(即U1A的6引腳)的輸出觀察其波形相位互補,不考慮死去時間。幅值為5V左右。可以看出波形中間有間隙,即為死區時間。 2.2.5 MOSFET驅動模塊 設置單片機程序,使單片機輸出合適的封鎖信號MCU_SD,讓IR2110處于正常工作狀態,而不是封鎖。下載程序,運行。用Ch1測IR2110芯片引腳LIN(即U1的12引腳)的輸入信號,Ch2測IR2110芯片引腳HIN(即U1的10引腳)的輸入信號,其信號波形與上圖相同,互補且幅值為5V。用Ch1測IR2110芯片LIN引腳(即U1的12引腳)的輸入信號,Ch2測IR2110芯片LO引腳(即U1的1引腳)的輸出信號,兩個信號的波形形狀、占空比應相同,輸入端電壓幅值為5V左右,輸出端電壓幅值為12.4V左右,因為沒有接MOSFET,LO端高電平接近Vcc(12V)。 用Ch1、Ch2測兩個IR2110芯片的LO引腳(即U1的1引腳)信號波形,兩者波形互補,電壓幅值均為12.4V左右。 2.2.6 H 橋主電路 驅動電路板通電,用Ch1測IR2110芯片LO引腳(即U1的1引腳)信號,Ch2測IR2110芯片引腳HO(即U1的7引腳)信號,LO電壓幅值為12.4V左右,HO波形幅值為18.8V左右。有上述設計圖可知,LO的電壓值等于Vcc減去內部管子管壓降,由于實際Vcc大于12V,所以LO電壓大于12V符合預期;HO的電壓值等于Vcc加上7.2V電源減去MOSFET管壓降再減去內部管子管壓降,由于實際Vcc大于12V,7.2V電源電壓高于7.2V,所以HO電壓為18.8V符合預期。 3.單片機程序設計與小車行駛實驗 3.1前進與后退行駛
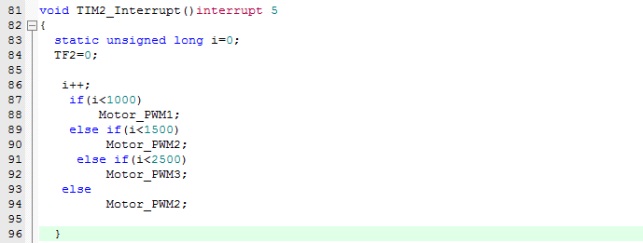
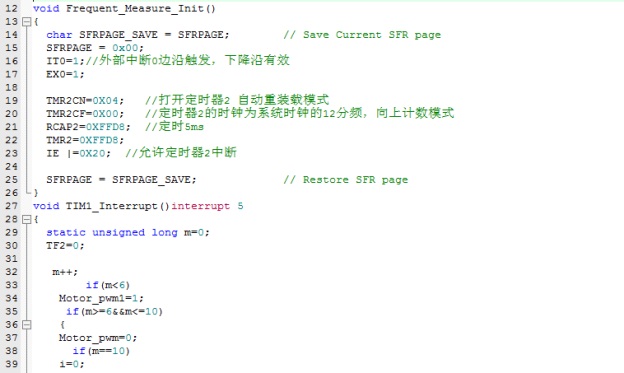
為了實現自傲車的前進后退功能,利用定時器2并允許中斷,設置定時時間為5ms,定義i小于1000時,運行Motor_PWM1函數即占空比為60%,小車前進;同理,i在1000到1500時,運行為占空比為50%的函數,小車停車2.5s;i在1500到2500時,運行占空比為40%函數,小車倒車5s,最后停車。 3.2PWM頻率的修改 首先定義三個管腳P0_1,P0_2,P0_3作為PWM波三種狀態下的三個信號輸出口。在i從0到1000時,利用定時器1,定時時間5ms,一共10份,周期即為50ms,所以通過改變定時器時間即可改變頻率。通過PWM1所占份數,即可改變占空比為 。同理在i不同的范圍內,輸出不同的PWM波,實現小車前進后退與停車。 4.結論 為期兩周的電力電子設計,首先是在畫原理圖跟PCB圖,又讓我重新熟悉了一下AD的使用方法,最主要的收獲就是一定要認真,在畫原理圖一定要保證所有先都準確連接。檢查網絡標號是否返回到有效位置,然后畫PCB時封裝一定要保證完全正確,避免在板子做出來后沒法焊的情況。畫PCB時還不要忘了也要看原理圖,把主要連接記下來,在擺放元件時把離得近的放在一起減短導線長度。回憶芯片管腳到底也沒有接線,應該接什么電阻,如果覺得不對勁,立刻檢查原理圖。然后就是在板子回來后的焊接與調試,焊接的時候一定要保證有極性的方向。在本次焊接時,板子中的一個51歐電阻焊成了51K的電阻,結果在測波形的時候,電解電容直接爆炸,也算是為自己的不細心付出了代價。通過本次設計,首先讓我更加深刻了解課本知識,過程中遇到的一些問題和疑惑,都經過組長和同學的講解得到了解答。也使我了解到一些實際與理論之間的差異,深知自己的不足,需要我們更加認真嚴謹。
Altium Designer畫的原理圖和PCB圖如下:(51hei附件中可下載工程文件)

0.png (4.33 KB, 下載次數: 91)
下載附件
2019-7-14 03:17 上傳
完整的Word格式文檔51黑下載地址:
 “飛思卡爾智能車驅動板”設計報告.rar
(2.95 MB, 下載次數: 103)
“飛思卡爾智能車驅動板”設計報告.rar
(2.95 MB, 下載次數: 103)
2019-7-12 13:54 上傳
點擊文件名下載附件
設計報告 下載積分: 黑幣 -5
飛思卡爾智能車原理圖PCB設計.rar
(101 KB, 下載次數: 141)
2019-7-12 13:48 上傳
點擊文件名下載附件
設計原理圖PCB及庫文件 下載積分: 黑幣 -5
| 



 [復制鏈接]
[復制鏈接]












 QQ好友和群
QQ好友和群 QQ空間
QQ空間 騰訊微博
騰訊微博 騰訊朋友
騰訊朋友 收藏
收藏 淘帖
淘帖 頂
頂 踩
踩


