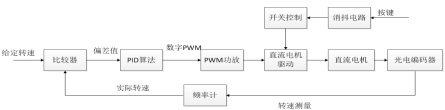
ֱ��늙C(j��)�������õĆ���(d��ng)���{(di��o)�����ܣ����V���ؑ�(y��ng)���ڌ�(du��)����(d��ng)���{(di��o)�����^��Ҫ����τ�(d��ng)ϵ�y(t��ng)����Փ����Ҫ��B���ڻ���FPGA��PWM��(sh��)�F(xi��n)ֱ��늙C(j��)�{(di��o)���Ļ���������PID�㷨��ԭ����ֱ��늙C(j��)�{(di��o)�ٵ����P(gu��n)֪�R(sh��)����(ji��n)�ν�B�˻���FPGA��Ӳ���a(ch��n)��PWM��̖(h��o)��;����Ȼ��Y(ji��)��PID�㷨��(du��)����(g��)ϵ�y(t��ng)�M(j��n)���]�h(hu��n)�����O(sh��)Ӌ(j��)�����ϵ�Ӳ���·�Ќ�(du��)ֱ��늙C(j��)�{(di��o)�ٵČ�(sh��)�F(xi��n)�ṩ��һ�N��Ч��;����
�ڬF(xi��n)�����I(y��)�У����N���a(ch��n)�C(j��)е����(j��)�乤ˇ���c(di��n)����(du��)�τ�(d��ng)��늄�(d��ng)�C(j��)����˸��N��ͬ��Ҫ���е�Ҫ����Ѹ�ن���(d��ng)���Ƅ�(d��ng)�ͷ��D(zhu��n)���е�Ҫ����_(t��i)늄�(d��ng)�C(j��)֮�g���D(zhu��n)�ٰ�һ���ı����f(xi��)�{(di��o)�\(y��n)��(d��ng)���е�Ҫ��늄�(d��ng)�C(j��)�_(d��)���O���ķ�(w��n)���\(y��n)��(d��ng)���е�Ҫ��늄�(d��ng)�C(j��)���Ƅ�(d��ng)ƽ��(w��n)�����ܜ�(zh��n)�_��ͣ�ڽo����λ�á���Ҋ���N�τ�(d��ng)ϵ�y(t��ng)����ͨ�^�����D(zhu��n)��?g��u)Ķ������D(zhu��n)�팍(sh��)�F(xi��n)�ġ��c����늄�(d��ng)�C(j��)��ȣ�ֱ��늄�(d��ng)�C(j��)�����{(di��o)�����ܺá��o����С����(w��n)���Ժ��Լ��������õĄ�(d��ng)�B(t��i)���ܡ��\(y��n)��Ч�ʸߵȃ�(y��u)�c(di��n)��������ஔ(d��ng)�L(zh��ng)�ĕr(sh��)�ڃ�(n��i)�������ܵ��{(di��o)��ϵ�y(t��ng)����������ֱ���{(di��o)��ϵ�y(t��ng)�� FPGA�������͵Ĵ�Ҏ(gu��)ģ�ɾ��̔�(sh��)�ּ����·���������������Ӌ(j��)��C(j��)�o���O(sh��)Ӌ(j��)���g(sh��)�M(j��n)���������_�l(f��)�c��(y��ng)�á��Ñ�������Ӌ(j��)��C(j��)���H�������O(sh��)Ӌ(j��)���ü����·оƬ��߀����Ӌ(j��)��C(j��)���M(j��n)�й��ܷ���͌�(sh��)�r(sh��)���棬���r(sh��)�l(f��)�F(xi��n)���}���{(di��o)���·�����M(j��n)�O(sh��)Ӌ(j��)�������@�ӣ��O(sh��)Ӌ(j��)�߲���(d��ng)�ִ���·���{(di��o)ԇ�(y��n)�C��ֻ���Ӌ(j��)��C(j��)�ϲ����̵ܶĕr(sh��)�g�������O(sh��)Ӌ(j��)���c��(sh��)�Hϵ�y(t��ng)���o�������·�����ң�F(xi��n)PGA�������Ø�(bi��o)��(zh��n)���Y(ji��)��(g��u)���w�eС�����ɶȸߡ����ĵ͡��ٶȿ죬�ɟo�η���(f��)���̣���ˣ��ɞ���Юa(ch��n)Ʒ�_�l(f��)����С�ͻ������x�������䑪(y��ng)�ØO��V���� ������Ҫ�о��Ć��}�ǣ�����ֱ��늙C(j��)���{(di��o)�ٷ�ʽ�����î�(d��ng)ǰ���M(j��n)�Ĕ�(sh��)�ּ��g(sh��)�ͬF(xi��n)��������Փ���������ɔ_�h(hu��n)���о��_����늙C(j��)�����Ƅ�(d��ng)���{(di��o)��(ji��)�D(zhu��n)�٣�����߿ɿ��ԡ����ͳɱ�����õ�ֱ���{(di��o)�ټ��g(sh��)���}���{(di��o)��(PWM) ֱ���{(di��o)�ټ��g(sh��),�������{(di��o)�پ��ȸߡ�푑�(y��ng)�ٶȿ졢�{(di��o)�ٷ������ͺēp�͵����c(di��n)��ϵ�y(t��ng)����PWM�{(di��o)��(ji��)��(sh��)�F(xi��n)��(du��)늙C(j��)���{(di��o)�٣����üt��l(f��)����Ռ�(du��)�ܲɼ�늙C(j��)�D(zhu��n)�١�FPGAϵ�y(t��ng)��(n��i)���M(j��n)�̹����ڲ��еĠ�B(t��i)�£������M(j��n)�����(d��)����ݔ����PWM���ξ����l�ʸߣ�ռ�ձ��{(di��o)��(ji��)�����ܵ����c(di��n)�����l�ʵ�PWM���Ό�(du��)ֱ��늙C(j��)�����ķ�(w��n)�������O����Ҫ�����ã������ڸ�ؓ(f��)�d���{(di��o)��ϵ�y(t��ng)���w�F(xi��n)�ă�(y��u)Խ�ԘO�����@���l��Խ��늙C(j��)�\(y��n)��Խƽ��(w��n)�����⣬��(du��)PWM ����ݔ��ռ�ձȵ��{(di��o)��(ji��)���M(j��n)��(x��)�ֵ����c(di��n)���ĔU(ku��)�����{(di��o)��ϵ�y(t��ng)���{(di��o)�ٷ��������O(sh��)Ӌ(j��)����Ҫ�о�FPGA�a(ch��n)��PWM���εă�(y��u)Խ�Բ���(du��)���M(j��n)���(y��n)�C������ᘌ�(du��)FPGAϵ�y(t��ng)�M(j��n)�еȾ����l�ʜy(c��)���ĸ߾������M(j��n)���(y��n)�C�� �� ֱ��늙C(j��)2.1 ֱ��늙C(j��)����ϵ�y(t��ng) ϵ�y(t��ng)��Ҫ��PID����������늜y(c��)���������a������PWM�}�_�����{(di��o)������ֱ��늙C(j��)�ȽM�ɡ����п��������Ô�(sh��)��PID���������ɘӲ��ù�늾��a����PWM�}�_�����{(di��o)������(du��)ģ�M��̖(h��o)�ƽ�M(j��n)�Д�(sh��)�־��a����늾��a���������͎���űP�Ĺ�는��m(x��)������(sh��)�W(xu��)ģ�͈D��D2-1��ʾ�� �D2-1 늙C(j��)����ϵ�y(t��ng)ԭ����D 2.2 ֱ��늙C(j��)�Ĕ�(sh��)�W(xu��)ģ�ͽ��� ��1��ֱ��늙C(j��)늉��cݔ���D(zhu��n)���P(gu��n)ϵ�D�� �D2-2 늙C(j��)늉�ݔ���c�D(zhu��n)���P(gu��n)ϵ ֱ��늙C(j��)늉��cݔ���D(zhu��n)��֮�g�Ă��f����(sh��)�飺 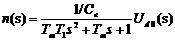 (2-1) ��Փ�IJ�������ֱ���X݆�p��늙C(j��)����̖(h��o)��Zheng Gear-Box Motor ZGB37RG�����P(gu��n)����(sh��)�����2-1��ʾ�� ��2-1 | | | | | | | | | | | | 늄�(d��ng)��(sh��)����(sh��) | | | V/(rad s) s) | | | | | | | | | | | | | | | | |
����(j��)���υ���(sh��)�ɵã����T��J=  +  =  ;  ;  �� �ɴ˿�֪  �����ԿɌ����f����(sh��)���ƞ飺  ��2-2�� ����늙C(j��)����(sh��)��늉�ݔ���cݔ���D(zhu��n)��֮�g�Ă��f����(sh��)�P(gu��n)ϵ�� 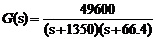 ��2-3�� �Ե�늉������D(zhu��n)���Լ����D(zhu��n)�صČ�(sh��)�Hֱ��늙C(j��)����汳�����x�~��늉�24V���p�ٱ�1/47.5�����d�D(zhu��n)��100r/min���~���D(zhu��n)��70r/min,�o���D(zhu��n)��60r/min�� ��PID�㷨 3.1 PID�㷨 PID��Proportional����������Integral���e�֣���Differential���֣����ߵĿs����PID�������B�m(x��)ϵ�y(t��ng)�м��g(sh��)����졢��(y��ng)����V����һ�N�����㷨�����������nj�(du��)��(d��ng)ǰƫ��ķ���(y��ng)���e�ֿ����ǻ����½��e(cu��)�`����(sh��)�ķ���(y��ng)�����ֿ��Ƅt�ǻ����e(cu��)�`׃���ʵķ���(y��ng)��PID���ƌ�(sh��)�|(zh��)�ǜy(c��)��ƫ��m��ƫ����Ҹ���(j��)ݔ���ƫ��ֵ�����������e�֡��ֵĺ���(sh��)�P(gu��n)ϵ�M(j��n)�гˡ����\(y��n)�㣬���\(y��n)��Y(ji��)������ݔ������  �� 3.1.1 ģ�MPID ��ģ�M����ϵ�y(t��ng)�У��{(di��o)��(ji��)����õĿ���Ҏ(gu��)����PID���ƣ���Ҏ(gu��)PID����ϵ�y(t��ng)ԭ����D��D3-1��ʾ��ϵ�y(t��ng)��ģ�MPID�{(di��o)��(ji��)������(zh��)�ЙC(j��)��(g��u)�����ƌ�(du��)��M�ɡ�
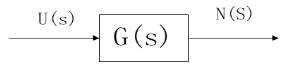
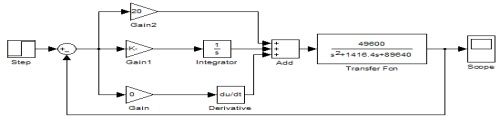
�D3-1 ģ�MPID����ϵ�y(t��ng)ԭ����D PID�{(di��o)��(ji��)����һ�N�����{(di��o)��(ji��)����������(j��)�o��ֵ  �c��(sh��)�Hݔ��ֵ  ��(g��u)�ɵĿ���ƫ� ģ�MPID�{(di��o)��(ji��)���Ŀ���Ҏ(gu��)�ɞ�  ��3-2�� ʽ�У�  �����ϵ��(sh��)��  ��e�֕r(sh��)�g����(sh��)��  ���֕r(sh��)�g����(sh��)�� ��ʽ��3-2���ɵã�ģ�MPID�{(di��o)��(ji��)���Ă��f����(sh��)��  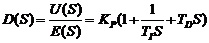 ��3-3�� 3.1.2 ��(sh��)��PID ����Ӌ(j��)��C(j��)ֻ���R(sh��)�e��(sh��)���������܌�(du��)�B�m(x��)�Ŀ�����ʽֱ���M(j��n)���\(y��n)�㣬����Ӌ(j��)��C(j��)����ϵ�y(t��ng)�У����ȱ�회�(du��)����Ҏ(gu��)���M(j��n)���xɢ�����㷨�O(sh��)Ӌ(j��)�� ���B�m(x��)�r(sh��)�g���У�PID����������ϵ�y(t��ng)��DҲֱ�ӿɱ����� �D3-2 PID����������ϵ�y(t��ng)��D PID���Ƃ��f����(sh��)�飺  ��3-4�� �r(sh��)�����ϰl(f��)׃�Q�飺  ��3-5�� ���У�e(t)���������ݔ�뼴����ϵ�y(t��ng)�Ľo�����cݔ������ƫ�u(t)���������ݔ����  �����ϵ��(sh��)��  ��e�֕r(sh��)�g����(sh��)��  ���֕r(sh��)�g����(sh��)�� ����ݔ������(sh��)�P(gu��n)ϵ�飺  ��3-6�� �f(xi��)�{(di��o)����(sh��) :��(d��ng) ����r(sh��)�����Լӿ�ϵ�y(t��ng)�Ą�(d��ng)�B(t��i)푑�(y��ng)�ٶȣ��pСϵ�y(t��ng)��(w��n)�B(t��i)�`���������ȫ������(w��n)�B(t��i)�`��  ������ �^��(hu��)����ϵ�y(t��ng)��ʎ�����{(di��o)�����ӣ��п������ϵ�y(t��ng)����(w��n)���� ��2������-�e�ֿ�����PI ����ݔ������(sh��)�P(gu��n)ϵ�飺 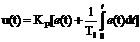 ��3-7�� ����e�֭h(hu��n)��(ji��)��Ŀ��������ϵ�y(t��ng)��(w��n)�B(t��i)�`���?y��n)��S�������ۼ�ƫ���K��(hu��)������(w��n)�B(t��i)�`����Ǖ�(hu��)Ӱ�ϵ�y(t��ng)�ķ�(w��n)���ԡ��e�֕r(sh��)�g����(sh��) Խ�e������Խ������֮�tԽ��(qi��ng)����ˣ��pС ������������(w��n)�B(t��i)�`�� ������ �^С�����ܕ�(hu��)���ϵ�y(t��ng)����(w��n)��������ϵ�y(t��ng)��(d��ng)�B(t��i)푑�(y��ng)�ٶ��^���� ��3������-�e��-�ֿ�����PID ����ݔ������(sh��)�P(gu��n)ϵ�飺  ��3-8�� �����֭h(hu��n)��(ji��)���Á�����ϵ�y(t��ng)��(d��ng)�B(t��i)푑�(y��ng)�ٶ��^������푑�(y��ng)�^���У���ǰ����ƫ�����κη����׃������(du��)ƫ��׃���M(j��n)����ǰ�A(y��)��(b��o)������ϵ�y(t��ng)���{(di��o)������ϵ�y(t��ng)��(w��n)����  ���f(xi��)�{(di��o)����(sh��) ,��(d��ng) �^���^С��Ҳ��(hu��)Ӱ�ϵ�y(t��ng)�Ą�(d��ng)�B(t��i)푑�(y��ng)�ٶȼ���(w��n)���ԡ� ��ϵ�y(t��ng)ܛ���O(sh��)Ӌ(j��) 4.1 MATLAB�O(sh��)Ӌ(j��)˼�� ��Փ���\(y��n)�����ĈD����湦���Д�o��ϵ�y(t��ng)�]�h(hu��n)���f����(sh��)�ķ�(w��n)���ԣ�Ȼ��ʹ��Simulink����ģ�K��(du��)ǰ��o������(sh��)��ʽ�Д��y(c��)ԇ�����m��P��I��D����(sh��)�� PID�����ѽ�(j��ng)�γ��˵��ͽY(ji��)��(g��u)������(sh��)�����{(di��o)�����Y(ji��)��(g��u)��(ji��n)�Σ��ҽY(ji��)����׃�`���PI��PD�ȣ������������V����(y��ng)�����S��I(y��)���a(ch��n)�^�̿��ƣ��@�������õ�Ч���� �D4-1 ϵ�y(t��ng)PID���ƿ�D
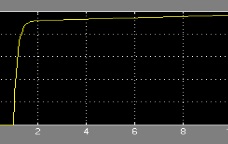
4.2 �O(sh��)Ӌ(j��)���E���Y(ji��)��Matlab�����O(sh��)Ӌ(j��)�������£� - �Д��]�h(hu��n)ϵ�y(t��ng)�ķ�(w��n)���ԣ�
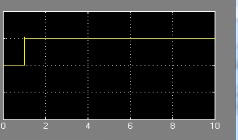
�D4-1 ֱ��늙C(j��)ݔ��늉��c�D(zhu��n)�ٺ���(sh��)�P(gu��n)ϵBode�D��Nyquist�����D ��(bi��o)ӛ���ι�˹�������cؓ(f��)��(sh��)�S�Ľ��c(di��n)����bode�D�L�������l���������c  ���ཻ�c(di��n)����(bi��o)�� ������1���ɵ�һ��(g��)�D֪�����_�h(hu��n)���f����(sh��)�Ѓɂ�(g��)�O�c(di��n)�����Ѓɗl��܉�E���Gɫ���֣����]�����c(di��n)�� 2���ɈD��֪������O�c(di��n)�D��ֻ�L����һ��(g��)�O�c(di��n)P1=-66.4����ʡ������һ��(g��)�O�c(di��n)P2=-1350�� 3�����_�h(hu��n)���f����(sh��)���_(d��)ʽ֪���_�h(hu��n)���f����(sh��)��,s�Ұ�ƽ��O�c(di��n)��(g��)��(sh��)P=0����s=jw����w��0�����o�F׃���r(sh��)���ι�˹�������@�c(di��n)��-1��j0����r(sh��)����D(zhu��n)Ȧ��(sh��)��N=0������(j��)�ι�˹�ط�(w��n)���Г�(j��)��,Z=P-2N=0�������]�h(hu��n)ϵ�y(t��ng)�Ƿ�(w��n)���ģ�����Z��ʾ�]�h(hu��n)���f����(sh��)��sƽ���Ұ�ƽ��O�c(di��n)��(g��)��(sh��)�� 4������(j��)��(du��)��(sh��)�l�ʷ�(w��n)���Г�(j��)���ַQBode�Г�(j��)�����]�h(hu��n)ϵ�y(t��ng)��(w��n)���ij�ֱ�Ҫ�l����  ��ͨ�^�^��Ҳ��֪�����l���������^ ���Δ�(sh��)��0���� N=0��ϵ�y(t��ng)�Ƿ�(w��n)���ġ�������P=0��Ҳ��Ӌ(j��)��N=0�� ��2����PID���Ʒ��� ��(du��)늙C(j��)ͬ������ϵ�y(t��ng)����PID������(j��)ʽ��2-3���Ă��f����(sh��)��ͨ�^���ԇ�(y��n)���õ��^�m�˵�PID����(sh��)��  ���O(sh��)Ӌ(j��)��ϵ�y(t��ng)PID����Y(ji��)��(g��u)�D��simulink����ģ�K�����ó�����Y(ji��)�����քe���D4-2��4-3��ʾ�� �D4-2 ϵ�y(t��ng)PID�����·���ģ�K�O(sh��)Ӌ(j��) ��a��PID������ȫ�ֈD (b)PID�����¾ֲ��D �D4-3 PID������ֱ��늙C(j��)ͬ������푑�(y��ng)���� �� ����FPGA��ֱ��늙C(j��)�]�h(hu��n)���Ɣ�(sh��)��Ӳ��ϵ�y(t��ng)�O(sh��)Ӌ(j��) 5.1 ϵ�y(t��ng)�Ĺ���ԭ�� ��1�����wӲ���Y(ji��)��(g��u)

�D5-1 ����FPGA��ֱ��늙C(j��)�]�h(hu��n)����ϵ�y(t��ng)�Ŀ��wӲ���Y(ji��)��(g��u) ��2������FPGA��ֱ��늙C(j��)�]�h(hu��n)����ϵ�y(t��ng)��ϵ�y(t��ng)�������̿�D��D6-2 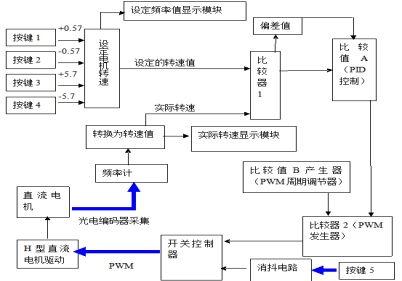
�D5-2 ֱ��늙C(j��)�]�h(hu��n)����ϵ�y(t��ng)��ϵ�y(t��ng)�������̿�D �������̞飺�z�y(c��)��늙C(j��)�����}�_�������D(zhu��n)�Q�錍(sh��)�H�D(zhu��n)��b����(sh��)�H�D(zhu��n)��b�cͨ�^�I�P�O(sh��)���õ��O(sh��)���D(zhu��n)��a���^���ҷ������ó�ƫ��ֵQ����(n��i)����PID�{(di��o)��(ji��)����(du��)ƫ��Q��a��b�M(j��n)�з�����ݔ���{(di��o)��(ji��)���^��2��PWM���ΰl(f��)�������ı��^ֵ����̖(h��o)�����^��2ݔ����PWM���νӵ�늙C(j��)�_�P(gu��n)��������늙C(j��)��������ݔ����ݔ�밴�I5���ơ��_�P(gu��n)�������_�r(sh��)ݔ��PWM���ε�H���(q��)��(d��ng)�·�(q��)��(d��ng)늙C(j��)������ �� ���Y(ji��) ���{(di��o)��ϵ�y(t��ng)�I(l��ng)������һ����͵�늙C(j��)��ֱ��늙C(j��)����Y(ji��)��(g��u)���c(di��n)���\(y��n)�з�ʽ�Ͼ��б�������͵Ă��y(t��ng)늙C(j��)���郞(y��u)����\(y��n)�����ܺ��V�����m�÷����������(y��ng)��ǰ���V韡�ᘌ�(du��)ֱ��늙C(j��)���Ƶ��о�Խ��Խ���룬������Ҳ������M(j��n)�ͷ��£��������ܲ�����ߡ���Փ�Ļ���FPGA��(du��)ֱ��늙C(j��)�M(j��n)��PID�Ԅ�(d��ng)���ƣ�����(g��)����ϵ�y(t��ng)���Ə�(f��)�s�����nj����Ўׂ�(g��)ģ�K���_����(d��)���M(j��n)���о����@�ú�(ji��n)�������ˡ�����(g��)ϵ�y(t��ng)�w�eС���ɿ��Ըߡ��`���ԏ�(qi��ng)����(sh��)�F(xi��n)�˔�(sh��)��ʽ���ơ� �����о�����������FPGA������ֱ���p��늙C(j��)�ٶȿ���ϵ�y(t��ng)�����Ô�(sh��)��Ӳ����ʽ��(sh��)�F(xi��n)�����㷨������(g��)ϵ�y(t��ng)�ٶȿ죬�ɿ��Ըߡ����пɔU(ku��)չ�ԣ����s����Ӳ���_�l(f��)�����ڡ�
������Word��ʽ�ęn51�����d��ַ��
 �ęn.doc
(407.4 KB, ���d��(sh��): 61)
�ęn.doc
(407.4 KB, ���d��(sh��): 61)
2019-6-24 01:15 �ς�
�c(di��n)���ļ������d����
���d�e��: �ڎ� -5
| 




 ����TQQ:125739409;���g(sh��)����QQȺ281945664
����TQQ:125739409;���g(sh��)����QQȺ281945664








 QQ���Ѻ�Ⱥ
QQ���Ѻ�Ⱥ QQ���g
QQ���g �vӍ��
�vӍ�� �vӍ����
�vӍ���� �ղ�
�ղ� ����
���� �
� ��
��