實驗實現溫度的智能控制,溫度超過設置溫度上下線會蜂鳴器會響及LED小燈發出亮光產生報警,實現實時溫控為目的。
實訓要求
(1)測量和控制溫度
(2)控制精度在正負1
(3)控制輸出通道為繼電器或雙向晶閘管
設計實施
1.系統概述
本實驗采用51單片機和溫度傳感器18B20來設計的,溫度測量范圍寬,嚴密性高等特點,溫度設計采用逢0.5進一的四舍五入的方法來消除其他客觀或非客觀因素帶來的不利影響,實現溫度的實時溫度測量及顯示,本實驗還可自行設置超溫報警和底紋報警控制,超出溫度范圍相應的繼電器工作,繼電器可以驅動相應的加熱或制冷負載,上下限溫度可通過按鍵設定功能。
2.主要單元電路(或功能程序)設計與分析
下面從軟件電路方面分析電路各部分功能及其作用:
一 、首先介紹電路最核心的版塊
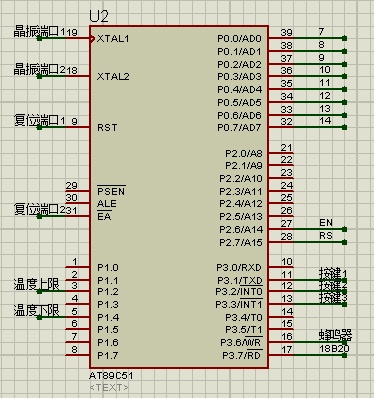
單片機最小系統
AT89C51是一種4k字節閃爍可編程可擦除只讀存儲器的低電壓 、高性能CMOS8位為微處理器存儲器,俗稱單片機。是一種高性能微處理器且為很多嵌入式控制系統提供了一種靈活性高且廉價的方案。
2、晶振模塊 晶振能把電能和機械能相互轉換的晶體在共振的狀體下工作,以提供穩定精確的單頻震蕩。為系統提供基本的時鐘信號,使系統各部分保持同步,通常與鎖相環電路配套使用。 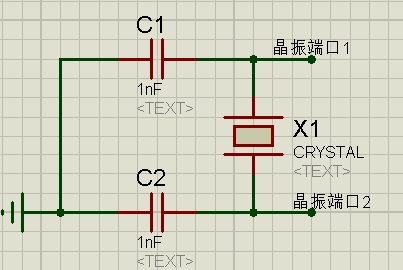
復位模塊在單片機上電啟動的時候復位一次,當按鍵按下的時候系統再次復位,如果釋放后再按下,系統還會復位。單片機rst引腳接收到2us以上的電平信號,只要保證電容的充放電時間大于2us,就可以實現復位,所以電容值是可以改變的。本電路中按下復位鍵以后液晶顯示屏上會顯示最初的設置。 
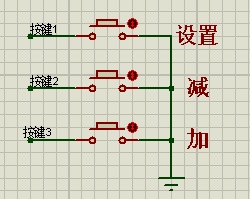
二、其它重要模塊 1、按鍵模塊 按鍵1設置功能 設置功能的作用是可以調節上下限溫度的限定值,比如溫度下限為10攝氏度,按下設置鍵可以選中液晶顯示屏中的下限溫度,按下加減鍵可以做溫度調整。 按鍵2加溫 按下按鍵2可以增加上下限設定溫度值。 按鍵3減溫 按下按鍵3可以減小上下限設定溫度值。
當溫度達到設定值上下限的時候,蜂鳴器模塊電路接通,蜂鳴器模塊開始工作發出刺耳的報警聲響。 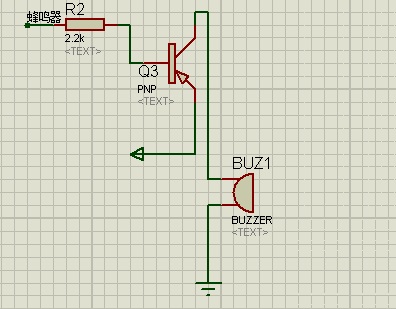
3、18B20模塊 18b20模塊是一個溫度采集模塊,能夠實時采集并傳輸溫度。具有體積小,硬件開銷低,抗干擾能力強,精度高的特點。采用單總線的接口方式 與微處理器連接時僅需要一條口線即可實現微處理器與 DS18B20 的雙向通訊。單總線具有經濟性好,抗干擾能力強,適合于惡劣環境的現場溫度測量,使用方便等優點。測量溫度范圍寬,測量精度高 DS18B20 的測量范圍為 -55 ℃ ~+ 125 ℃ ; 在 -10~+ 85°C范圍內,精度為 ± 0.5°C 。負壓特性電源極性接反時,溫度計不會因發熱而燒毀,但不能正常工作。 DS18B20管腳排列: 1. GND為電源地; 2. DQ為數字信號輸入/輸出端; 3. VDD為外接供電電源輸入端(在寄生電源接線方式時接地) 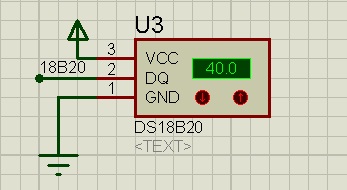
三、上下限水溫報警顯示控制模塊 1、蜂鳴器、小燈報警模塊 Led燈報警模塊中接入了兩個繼電器控制當溫度超過所設置溫度的上下限以后繼電器工作電路接通,led燈變亮發出報警信息。 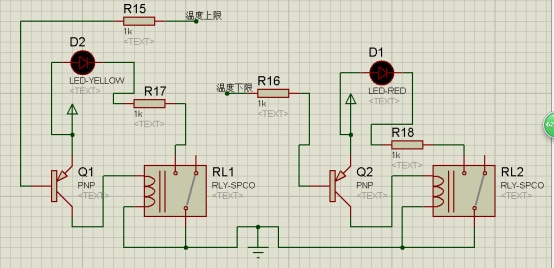
2、顯示模塊 采用Lm016L液晶顯示屏,藍屏帶背光白字體。用于顯示控制溫度 
相同性質的電阻排列在一起,在電路中共同作用。 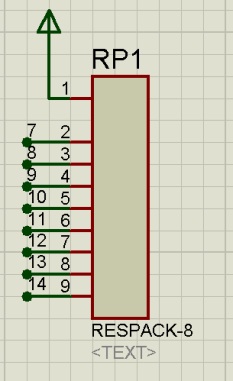
3.硬件組裝與測試 硬件組裝與調試,先看仿真結果: 1 正常初始化溫度及運行狀況 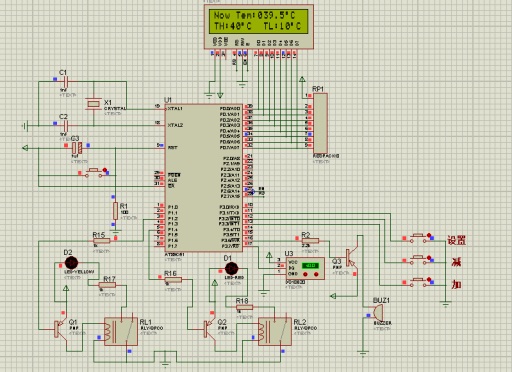
2上限溫度報警 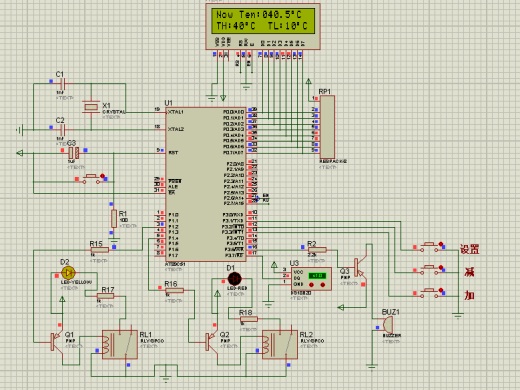
3下限溫度報警 
4 上下限溫度調節 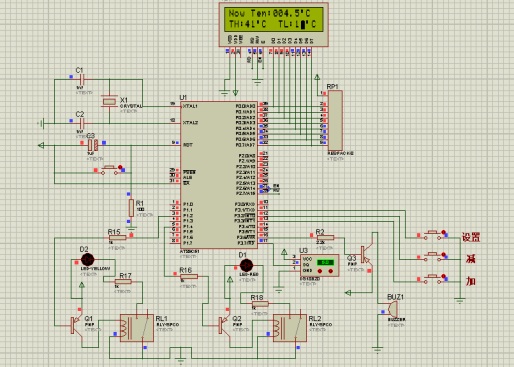
設計過程中遇到的問題: 在設計電路的過程中遇到了顯示溫度,而小燈和蜂鳴器在溫度超過上下限之后小燈不亮,蜂鳴器不報警的情況,經查為電路接入電阻過高,導致元器件不能正常工作。 設計思路總流程圖 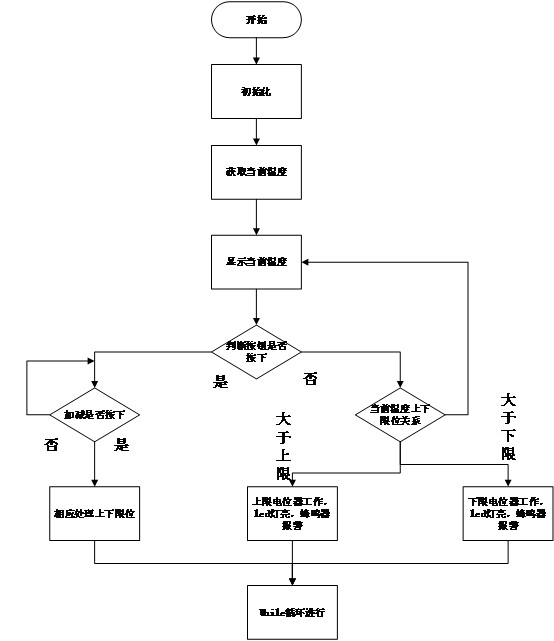
四.實訓小結 通過本次實訓讓自己認識到了那些方面不足,那些方面需要改進。使自己的動手能力和查閱資料獨立思考的能力更加強大,再一個感謝指導老師的細心指導,讓自己懂得了更多的知識。 五.附錄 1.主要電路圖和主程序流程圖。 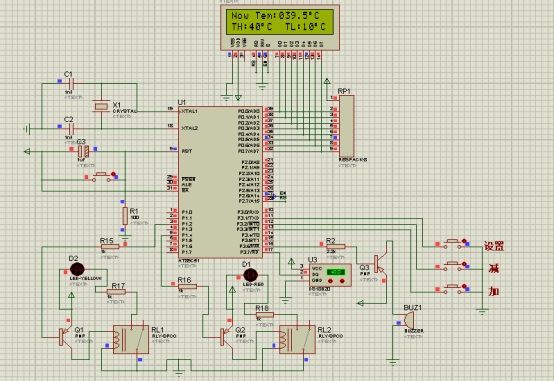
4.程序設計與調試

上傳.png (56.2 KB, 下載次數: 64)
下載附件
2019-6-9 17:25 上傳
word文檔51hei下載地址(如有錯誤 請大家指出 一起學習):
 電子綜合設計實訓報告.docx
(254.24 KB, 下載次數: 92)
電子綜合設計實訓報告.docx
(254.24 KB, 下載次數: 92)
2019-6-9 17:22 上傳
點擊文件名下載附件
內含程序及原理 下載積分: 黑幣 -5
| 









 QQ好友和群
QQ好友和群 QQ空間
QQ空間 騰訊微博
騰訊微博 騰訊朋友
騰訊朋友 收藏
收藏 淘帖
淘帖 頂
頂 踩
踩

