|
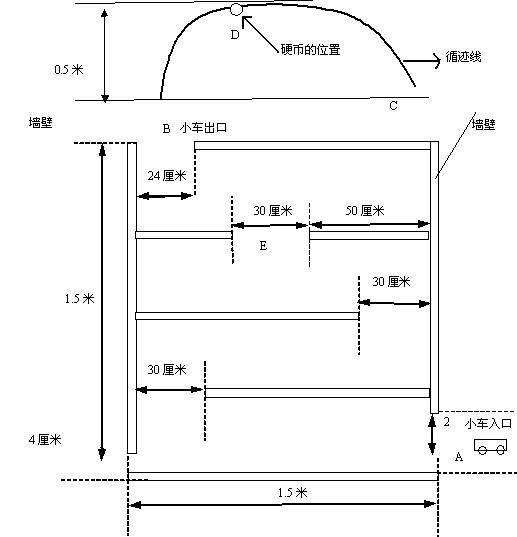
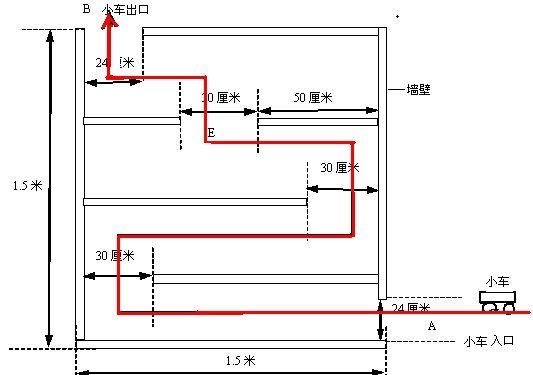
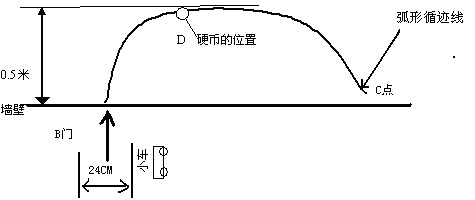
1.1�O(sh��)Ӌ(j��)�΄�(w��)���� �O(sh��)Ӌ(j��)����һ������С܇��ԓС܇�ܰ���Ҫ���Ԅ��\(y��n)�У�ͨ�^һ�������������۵ĵ�·�������Ҏ(gu��)���Ą������O(sh��)���ν������Ѓɂ��TA��B���T��24���ף�������ĉ�����10���ߣ����cС܇�߶���ͬ����2����İ������������(n��i)�o����(d��o)܉�E��Ҋ�Dʾ���� 1.2�����΄�(w��) 1��Ҫ������С܇��A�T�M(j��n)�벢�_ʼ�Ԅ�Ӌ(j��)�r(sh��)����B�T�����������M(j��n)�^���У����Ԅ��x���m��(d��ng)?sh��)�·�������_���ڣ��ҵ�ͨ·�������֮��(n��i)���_(d��)B�T�� 2�����_(d��)B�T��ͣ5�룬С܇�Ԅ�Ӌ(j��)�r(sh��)����(sh��)���@ʾAB�����õĕr(sh��)�g�������(b��o)���� 1.3�l(f��)�]���� 1����B�T�⣬ѭ��������(d��o)܉�EBCǰ�M(j��n)������(d��o)܉�E��2�������� 2��;�Йz�y���FƬD���FƬD������܉�EBCǰ����֮һ���ϵ�����λ�ã��r(sh��)ͣ܇3�룬�����(b��o)���� 3��Ҫ��С܇ʰ���FƬD���^�m(x��)������(d��o)܉�Eǰ�M(j��n)�� 4�����_(d��)C�c(di��n)�� 5����C�c(di��n)̎�������FƬD��ֹͣǰ�M(j��n)�����@ʾ��Ԯ�Y(ji��)������ֹͣӋ(j��)�r(sh��)���քe�@ʾBD��DC�����õĕr(sh��)�g���FƬ��ֱ��2���ĈA�α�Ƭ�� ע:���ܾ�ԮС܇���؈DƬ�����P(gu��n)�f��
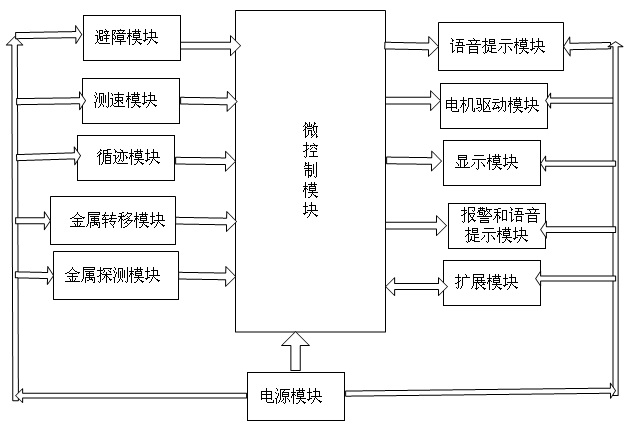
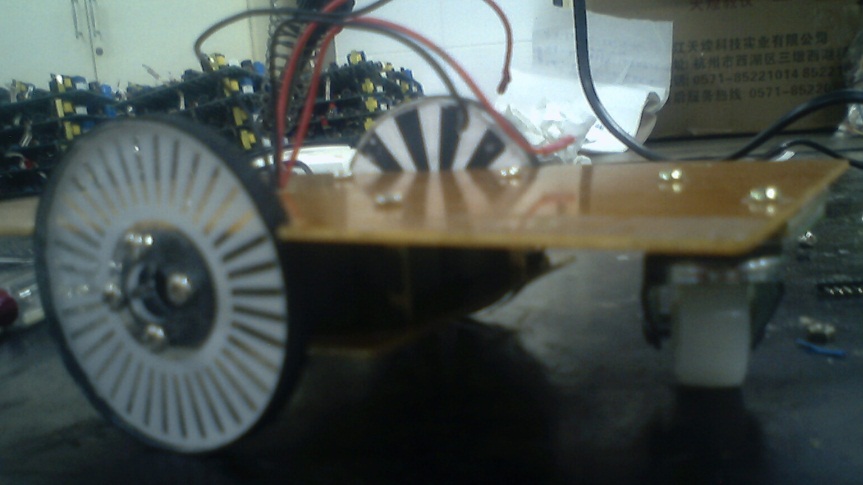
���ܾ�ԮС܇���؈D ����ϵ�y(t��ng)����Փ�C�c�x�� ����(j��)�}Ŀ�е��O(sh��)Ӌ(j��)Ҫ��ϵ�y(t��ng)��Ҫ��������ģ�K���Դģ�K������ģ�K��ѭ�E������ģ�K��ֱ��늙C(j��)�����(q��)��ģ�K�����ٙz�yģ�K���ǶȜy��ģ�K���Z����ʾģ�K�Լ�Һ���@ʾģ�K�Ș�(g��u)�ɡ���ϵ�y(t��ng)�ķ���D��D1��ʾ�� ϵ�y(t��ng)����D ���^�õČ�(sh��)�F(xi��n)��ģ�K�Ĺ��ܣ��҂��քe�O(sh��)Ӌ(j��)�ˎN�������քe�M(j��n)����Փ�C�� 2.1܇�w����Փ�C�c�x�� ����1��ُ�I���늄�܇��ُ�I�����늄�܇���нM�b������܇��܇݆��늙C(j��)�����(q��)���·�����늄�܇��늙C(j��)�������ֱ��늙C(j��)������С�����d�D(zhu��n)�ٿ죬ؓ(f��)�d���ܲ�����{(di��o)�١������@�N늄�܇һ�㶼�r(ji��)�ơ�����҂��ŗ��˴˷����� ����2���Լ�����늄�܇����(j��ng)�^����(f��)���]Փ�C���҂��ƶ������҃�݆�քe�(q��)�ӣ���У܇������f��݆�D(zhu��n)��ķ�����������݆�քe�Ãɂ��D(zhu��n)�ٺ����ػ�����ȫ��ͬ��ֱ��늙C(j��)�M(j��n)���(q��)�ӣ�܇�wβ���bһ���f��݆���@�ӣ���(d��ng)�ɂ�ֱ��늙C(j��)�D(zhu��n)���෴ͬ�r(sh��)�D(zhu��n)����ͬ�r(sh��)�Ϳ��Ԍ�(sh��)�F(xi��n)늄�܇��ԭ�����D(zhu��n)���ɴ˿����p�ɵČ�(sh��)�F(xi��n)С܇����(bi��o)��׃��90�Ⱥ�180�ȵ��D(zhu��n)������(d��ng)С܇ǰ�M(j��n)�r(sh��)�����҃��(q��)��݆�c���f��݆�γ������c(di��n)�Y(ji��)��(g��u)���@�N�Y(ji��)��(g��u)ʹ��С܇��ǰ�M(j��n)�r(sh��)���^ƽ��(w��n)�����˷�ֹС܇���ĵ�ƫ�ƣ����f��݆��֧�η�(w��n)�������á�����܇�ܲ��ϵ��x���҂���(j��ng)�^���^�x���ˌ�(sh��)�(y��n)�ҳ��õķ��~�·�塣�÷��~�·������܇�ܱ�����܇�ܸ����ι̣����F��С܇���p�㣬���^���C�Ͽ��]���҂��x���˷���2��������С܇��(sh��)�����D��ʾ��
С܇��(sh��)�� 2.2����ģ�KՓ�C�c�x�� ����һ��������ꖹ�˾��16λ��Ƭ�C(j��)������16λ�������������w�eС���(q��)��������(qi��ng)���ɿ��Ըߡ����ĵ͡��Y(ji��)��(g��u)���Ρ������Z��̎�����\(y��n)���ٶȿ�ȃ�(y��u)�c(di��n)�������]���҂�С�M���@���������õ�̎����������Ϥ��ʹ�����������Ǻܷ��㣬�@����Ӳ���·���O(sh��)Ӌ(j��)��ܛ�������������y�ȡ��҂��Q������ʹ�ô˷��������]���������� ������������STC 89C52��Ƭ�C(j��)��������������STC 89C52��һ�������ģ��͘�(bi��o)��(zh��n)51ϵ�І�Ƭ�C(j��)����^�����\(y��n)���ٶȿ죬���ɔ_������(qi��ng)��֧��ISP�ھ����̣�Ƭ��(n��i)��8k���g�Ŀɷ���(f��)����1000�ε�Flashֻ�x�惦��������256 bytes���S�C(j��)��ȡ��(sh��)��(j��)�惦����RAM����32��I/O�ڣ�2��16λ�ɾ��̶��r(sh��)Ӌ(j��)��(sh��)������ָ��ϵ�y(t��ng)�͂��y(t��ng)��8051ϵ�І�Ƭ�C(j��)ָ��ϵ�y(t��ng)���ݣ�������ϵ�y(t��ng)ܛ���O(sh��)Ӌ(j��)���y�ȣ��·�O(sh��)Ӌ(j��)���Ρ��r(ji��)��������ں���Č�(sh��)�(y��n)���҂��l(f��)�F(xi��n)��STC 89C52���_�Ⱥ��\(y��n)���ٶ�Ҳ����ȫ�����҂�ϵ�y(t��ng)��Ҫ�� �C�����Ϸ����҂��x����^��ͨ�ĸ�����Ϥ�ķ�����ʹ��STC89C52��Ƭ�C(j��)���҂�����ϵ�y(t��ng)�Ŀ��ƺ��ġ� 2.3�Դģ�KՓ�C�c�x�� ���ڱ�ϵ�y(t��ng)��Ҫ�o��ԮС܇ϵ�y(t��ng)��늣��҂����]���N����: ����һ������7.2V�ɳ�늄���늳ؽM������늳ؽM�����^��(qi��ng)������(q��)����������(w��n)����늉�ݔ�����ܣ���(j��ng)�yԇ���ô˷N��늷�ʽ�£���Ƭ�C(j��)�͂�����������(w��n)����ֱ��늙C(j��)�������ã���늳��w�e�^С�����Գ�늡��܉��؏�(f��)���õȣ��܉�M��ϵ�y(t��ng)��Ҫ�� ������������12V��늳؞�ֱ��늙C(j��)��늣���12V늉���������(w��n)����o��Ƭ�C(j��)ϵ�y(t��ng)������оƬ��늡���늳ؾ����^��(qi��ng)������(q��)�������Լ���(w��n)����늉�ݔ�����ܡ�������늳ص��w�e�^�����������҂���܇�w���O(sh��)Ӌ(j��)�r(sh��)���g���ޣ���С��늄�܇��ʹ�ØO�鲻���㣬����҂��ŗ��˷����� �C�Ͽ��]���҂��x���˷���һ��������ܾ�ԮС܇ϵ�y(t��ng)��늵��΄�(w��)�� 2.4늙C(j��)ģ�K�x���cՓ�C ����һ������ֱ���p��늙C(j��)��ֱ���p��늙C(j��)�D(zhu��n)�����ش��w�eС�������p���b�了�Σ�ʹ�÷��㣬С܇늙C(j��)��(n��i)���b�Мp���X݆�M�����Բ�����Ҫ���]�{(di��o)�ٹ��ܣ��ܷ���ľͿ��Ԍ�(sh��)�F(xi��n)ͨ�^��Ƭ�C(j��)��ֱ���p��늙C(j��)ǰ�M(j��n)�����ˡ�ֹͣ�Ȳ����� �����������ò��M(j��n)늙C(j��)����ԓϵ�y(t��ng)���(q��)��늙C(j��)���������D(zhu��n)�ӵĽǶȿ��Ծ��_��λ�����Ԍ�(sh��)�F(xi��n)С܇ǰ�M(j��n)���x��λ�õľ��_��λ���mȻ���ò��M(j��n)늙C(j��)���T����(y��u)�c(di��n)�������M(j��n)늙C(j��)��ݔ�������^�ͣ��S�D(zhu��n)�ٵ����߶��½��������^�ߵ��D(zhu��n)�ٕr(sh��)�������½������D(zhu��n)���^�͕r(sh��)���m��С܇�Ȍ��ٶ���һ��Ҫ���ϵ�y(t��ng)����(j��ng)�C�ϱ��^�����҂��Q���ŗ��˷����� �C�����Ͽ��]�҂��x��һ��ֱ���p��늙C(j��)����������ԮС܇���(q��)��늙C(j��)�� 2.5늙C(j��)�(q��)��ģ�K�x���cՓ�C ����һ�����÷����M���M�ɵ�ƽ��ʽ�(q��)���·���@�N�·�����Ɇ�Ƭ�C(j��)ֱ�ӌ����M(j��n)�в����������ڷ����M��ռ�õĿ��g���^��߀Ҫ���σɂ��^��������]��С܇�Ŀ��g���}���˷�����������,�҂��Q���ŗ��˷�����
����������?y��n)�С܇늙C(j��)��(n��i)���b�Мp���X݆�M�����]�����{(di��o)�ٹ��ܣ�����������ُ��늙C(j��)�(q��)��оƬL293D���Ɯp��늙C(j��)��ԓоƬ������TTL�ƽ�M(j��n)�п��ƣ�ͨ�^��׃оƬ���ƶ˵�ݔ���ƽ�������Ԍ�늙C(j��)�M(j��n)�����D(zhu��n)�����D(zhu��n)��ֹͣ���������ܝM��ֱ���p��늙C(j��)��Ҫ����ԓоƬ����늙C(j��)�(q��)�Ӿ��еIJ������㡢��(w��n)���Ժõȃ�(y��u)�c(di��n)�� �C�����Ϸ����cՓ�C�҂��x�������(q��)��оƬL293D����������ԮС܇ϵ�y(t��ng)��늙C(j��)�(q��)���·�� 2.6����ģ�K���x���cՓ�C ����һ���ó����������M(j��n)�б��ϡ�������������ԭ���ǣ������ɉ���մɳ����������l(f��)���������ϵK��㷴������ٱ��������������ա������������ڱ��ϵ��O(sh��)Ӌ(j��)�б��V����(y��ng)�á����dz�����������Ҫ40KHz�ķ�����̖����������?y��n)鳬���������������l��Ҫ���^�ߣ�ƫ����1����(n��i)��������ģ�M�·���������l(f��)�������^�y�Ԍ�(sh��)�F(xi��n)������҂����]�����ķ����� ����������������ʽ����_�P(gu��n)�M(j��n)�б��ϡ�����_�P(gu��n)�Ĺ���ԭ���Ǹ���(j��)�⾀�l(f��)���^�l(f��)���Ĺ����������w���䣬������·��(j��)�������Д෴��(y��ng)�����w���t�����ͬ����·�xͨ���z�y���w���Пo����(d��ng)�й⾀�����r(sh��)��ݔ�����ƽ����(d��ng)�]�й⾀�����r(sh��)��ݔ�����ƽ�����]����ϵ�y(t��ng)ֻ��Ҫ�z�y�ϵK��]��ʮ�֏�(f��)�s�ĭh(hu��n)��������ʹ�÷��㣬���ڲ������{(di��o)ԇ���҂���K�x���˷�����������_�P(gu��n)�Č�(sh��)�����D��
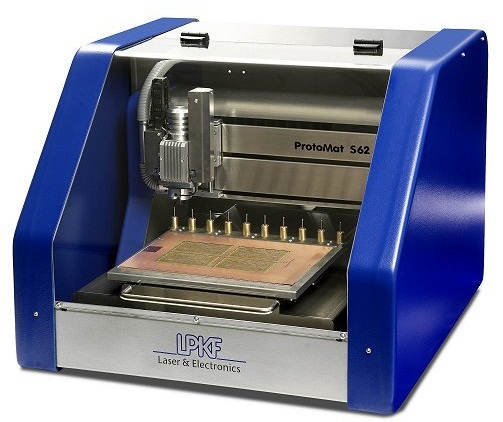
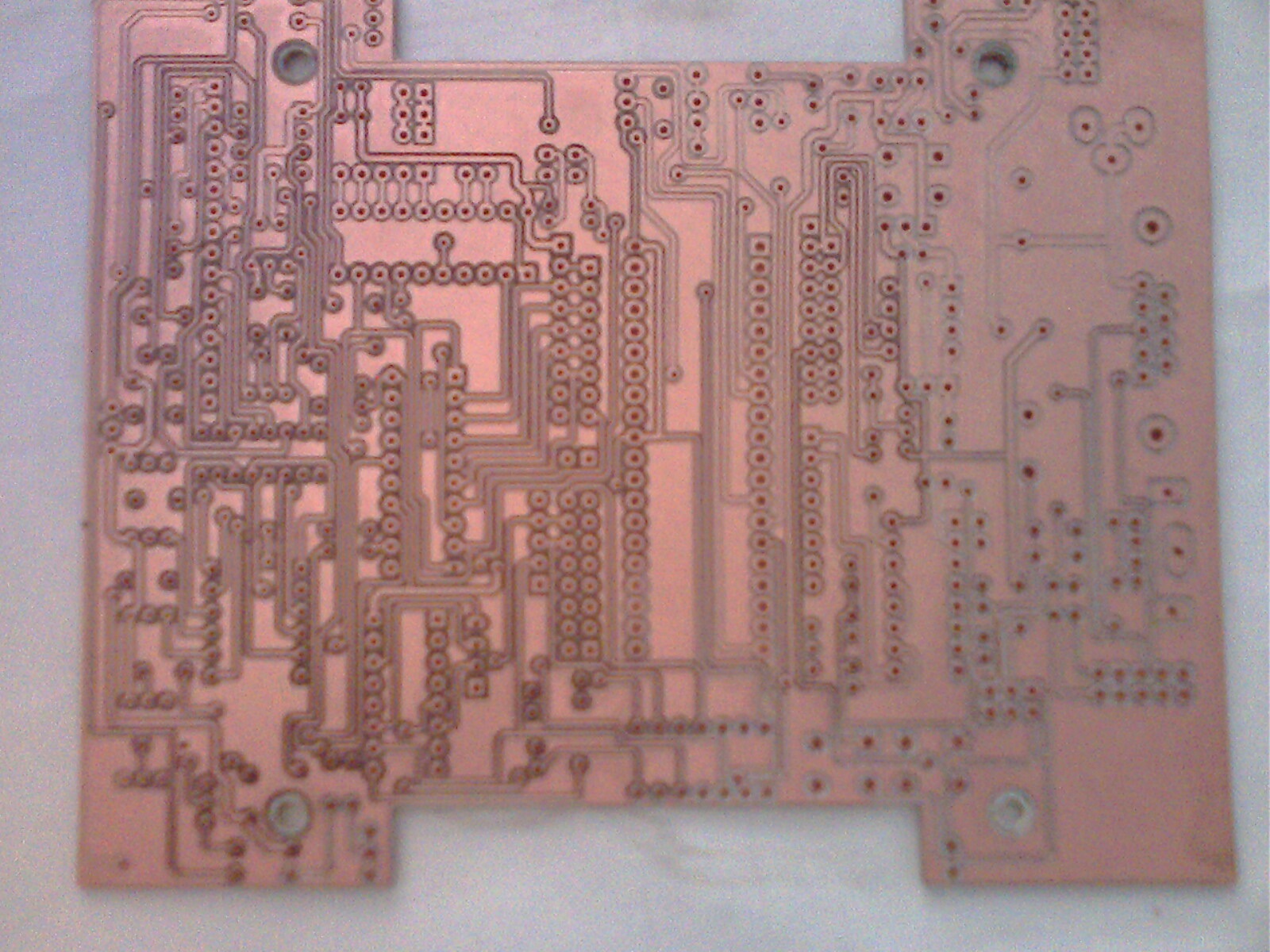
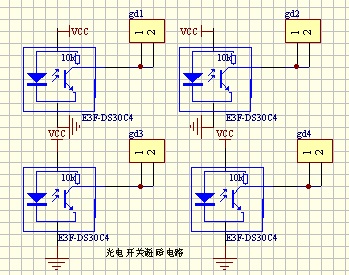
2.7ѭ�Eģ�K�x���cՓ�C ����һ���ù������M�ɹ���̽�y��������������ֵ���Ը��S�܇��h(hu��n)���⾀��׃����׃������(d��ng)�⾀���䵽������r(sh��)���⾀�l(f��)�䏊(qi��ng)�ң��⾀���䵽�ھ�����r(sh��)���⾀�l(f��)���^������˹�������ڰ�ɫ܉�E�Ϸ��ͺ�ɫ܉�E�Ϸ��r(sh��)����ֵ���l(f��)�����@��׃��������ֵ��׃��ֵ��(j��ng)�^���^���Ϳ���ݔ���ߵ��ƽ����Ƭ�C(j��)��(j��)�ˁ��Д�С܇�Ƿ�ƫ�x܉����������(j��)��������ͬ���ƽ��̖���l(f��)������(y��ng)�Ŀ��Ʋ��������У�(y��n)С܇��λ�á������С܇��ѭ�E�΄�(w��)�������@�N������ȱ�c(di��n)���ܭh(hu��n)���й⾀��Ӱ푺ܴ��܉�(w��n)���Ĺ���������҂����]�������ӷ�(w��n)���ķ����� ����������RPR220��늌������ϵ�y(t��ng)ѭ�E��RPR220��һ�Nһ�w���������̽�y������l(f��)������һ���黯扼t��l(f��)����O�ܣ�����������һ�����`���ȣ���ƽ�������O�ܡ�RPR220���c(di��n)�������R��������`���ȡ���(n��i)�ÿ�Ҋ���^�V���ܜpС�xɢ���Ӱ푡��w�eС���Y(ji��)��(g��u)�o�����˹�늌����{(di��o)���·���Σ��������ܷ�(w��n)���� ��(j��ng)�yԇ��������Փ���ںڰ������Ǐ�(qi��ng)�������£�С܇ϵ�y(t��ng)�����Ժܷ�(w��n)���Ĺ��������h(hu��n)�����m��(y��ng)�����^��(qi��ng)������҂��x��һ�� 2.8���ق�����ģ�KՓ�C�c�x�� ����һ������CCD�D������� ����CCD�D����������m���ڸ��N���ęz�y�����Йz�y�ĈD����������(zh��n)�_���D������Ѻã�������CCD�D���������Ҫ̎������̖��̫���r(ji��)���F��Ӳ���·�O(sh��)Ӌ(j��)���y��ܛ�����̏�(f��)�s�����w�e�^���ڿ��g����С܇��ʹ�ô����T��IJ��㣬��CCD��ʹ���c��ϵ�y(t��ng)�� ������������늸�ʽ�ӽ��_�P(gu��n) 늸�ʽ�ӽ��_�P(gu��n)����һ�N���_�P(gu��n)��ݔ����λ�Â�����������LC���l��ʎ���ͷŴ�̎���·�M�ɣ����ý������w�ڽӽ��@���ܮa(ch��n)��늴ň�����ʎ�Б�(y��ng)�^�r(sh��)��ʹ���w��(n��i)���a(ch��n)���u�����@���u���������ڽӽ��_�P(gu��n)��ʹ�ӽ��_�P(gu��n)��ʎ����˥�p����(n��i)���·�ą���(sh��)�l(f��)��׃�����ɴ��R�e���Пo�������w�ӽ����M(j��n)�������_�P(gu��n)��ͨ��ࡣ�@�N�ӽ��_�P(gu��n)���ܙz�y�����w����ǽ������w�����w�e�^С�m���ڿ��g�������ܾ�ԮС܇��ʹ���䌍(sh��)��D���D��ʾ�� ͨ�^���Ϸ����҂��x�������������ʽ�ӽ��_�P(gu��n)������}Ŀ�еČ����FƬ���΄�(w��)�� 2.9�FƬ�D(zhu��n)��ģ�KՓ�C�c�x�� �FƬ�D(zhu��n)��ģ�K��Ҫ��(sh��)�F(xi��n)���ق�������̽�y�����ٺѽ����D(zhu��n)�Ƶ�ָ���^(q��)�� ����һ�����øߏ�(qi��ng)�ȴ��F��(sh��)�F(xi��n)�FƬ���Ƅӡ��ߏ�(qi��ng)�ȴ��F����ʹ�ú��Σ��o������·��ֱ�ӌ����F�����ھ�ԮС܇�ױP��ijһ�̶�λ�ã���(d��ng)��ԮС܇�����FƬ�r(sh��)�����FƬ�����ڴ��F���棬���_(d��)���D(zhu��n)���FƬ��Ŀ�ġ����Dz��ܰ�Ҫ����FƬ���£����ڴ˷������ܺܺõ����Ҫ���҂��Q���ŗ��˷����� ������������늴��^�����ͨ늕r(sh��)�ɮa(ch��n)���ň���ԭ��������늴��^���ͨ늵�˲�g���a(ch��n)���Ĵň�����ɽ����FƬ���D(zhu��n)���΄�(w��)��ͣ늟o�ň������FƬ��늴��^������С��������(qi��ng)�����چ�Ƭ�C(j��)I/O�ڵĿ��ơ� �C�����Ϸ���Փ���҂��x��������(sh��)�F(xi��n)С܇�D(zhu��n)���FƬ�� 2.10��(b��o)�����Z����ʾģ�K�x���cՓ�C ����һ������IDS1420�ɷֶ�䛷���ģ�K���ʷŴ��·����ݔ����̖ͨ�^���ʷŴ��·�Ŵ��ݔ����IDS1420�Z��оƬ��ͨ�^��Ƭ�C(j��)�M(j��n)��䛷����Ŀ��ƣ��䃞(y��u)�c(di��n)���܉�o����ֱ�^����ʾ������ֱ��ģ�M���惦���g(sh��)���Z���|(zh��)���^�ã����x���^�ã����ĵͣ����@Щ�l�������ԮС܇���Z����ʾ��(zh��n)���˺ܺõėl���� �����������Æ�Ƭ�C(j��)�a(ch��n)����ͬ���l����̖ͨ�^���Q�����������ʾ���ܣ���Ӳ���·���^����(sh��)�F(xi��n)������ȱ�c(di��n)�ǽo������ʾ�Ŀɶ��Ա��^��o�˵ĸ��X����ֱ�^�����]�ı��}Ŀ�ľ��wҪ���҂��Q�������ô˷����� ͨ�^���Ϸ���Փ���҂��x��һ����ɾ�ԮС܇ϵ�y(t��ng)���Z����ʾ���ܡ� 2.11�@ʾģ�KՓ�C�c�x�� ����һ������LED��(sh��)�a���@ʾ�� LED�@ʾ����Ӳ���·�Y(ji��)��(g��u)���Ρ��{(di��o)ԇ���㡢ܛ����(sh��)�F(xi��n)�������ȃ�(y��u)�c(di��n)�����������҂�Ӌ(j��)��Ҫ�@ʾС܇�\(y��n)�Еr(sh��)�g��LED��(sh��)�a�ܟo���@ʾ����S���ă�(n��i)�ݣ�����҂��ŗ��˷����� ������������LCDҺ���@ʾ��LCDҺ�����й��ĵ͡��@ʾ��(n��i)���S�����������@ʾ��Ϣ�����@ʾ�ٶ��^�죬�����Ѻõȶ��õ��V����(y��ng)�ã�����҂��x��˷����� ͨ�^���Ϸ���Փ���҂��x�������@ʾС܇�\(y��n)�Еr(sh��)�g���΄�(w��)�� 2.12���ܾ�ԮС܇��K���� ��(j��ng)�^����(f��)��̽ӑ��Փ�C�҂���K�_�����ܾ�ԮС܇��������K������ 1.܇�w�÷��~�·���ֹ������� 2.����STC89C52��Ƭ�C(j��)���������·�Ŀ��ƺ��ġ� 3.ʹ��7.2V�ɳ�늄���늳ؽM��ϵ�y(t��ng)�ṩ����(zh��n)�Դ�� 4.����ֱ���p��늙C(j��)�����ԮС܇ϵ�y(t��ng)���(q��)��늙C(j��)�� 5.ʹ��늙C(j��)�����(q��)��оƬL293D����ֱ���p��늙C(j��)���(q��)��оƬ�� 6.���ù���_�P(gu��n)�������M�ɾ�ԮС܇�ı���ϵ�y(t��ng)�� 7. ��RPR220��늌������ϵ�y(t��ng)�Č��E�΄�(w��)�� 8. ���ýӽ��_�P(gu��n)��ɽ��ٙz�y�΄�(w��)�� 9. ���þ�Ȧͨ늿��Ԯa(ch��n)���ň���ԭ������NƬ���D(zhu��n)�ơ� 10. ����IDS1420䛷���ģ�K��ɾ�ԮС܇���Z����ʾ���ܡ� ���� ����Ӳ��ϵ�y(t��ng)���O(sh��)Ӌ(j��)�c���܌�(sh��)�F(xi��n) 3.1��ԮС܇����·������ �ھ�·�������O(sh��)����x���ϣ��҂�ʹ�õ��ǵ����I(y��)�·���O(sh��)��LPKF ProtoMat? S62 �·��̰�C(j��)��LPKF��·���̙C(j��) ProtoMat? S62 �ľ��_���^�ߣ��ֱ��ʸ��_(d��)0.25 �ס��ɿ����������N��(f��)�s������Ҫ���^�ߵľ�·�壬ԓ��·���̙C(j��)�����(y��u)�c(di��n)�ǣ������p�澀·����ٶ��^�죬�e�m�ό��r(sh��)�g���^��Ҫ�������O(sh��)Ӌ(j��)��ِԇ�ã��䌍(sh��)��D�;�ԮС܇ϵ�y(t��ng)��·��Č�(sh��)��D�քe���D��ʾ��
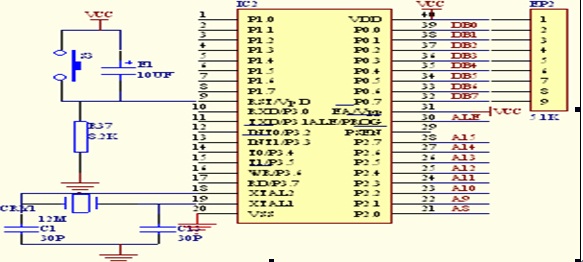
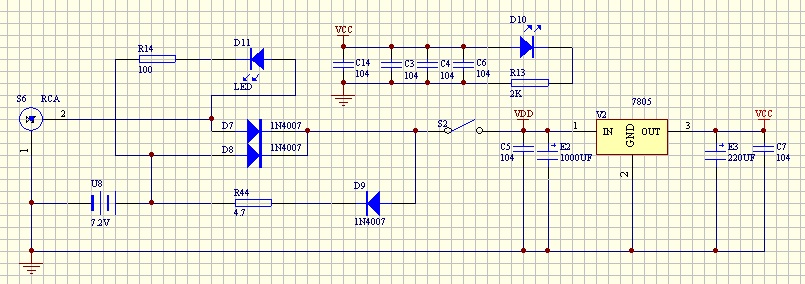
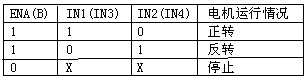
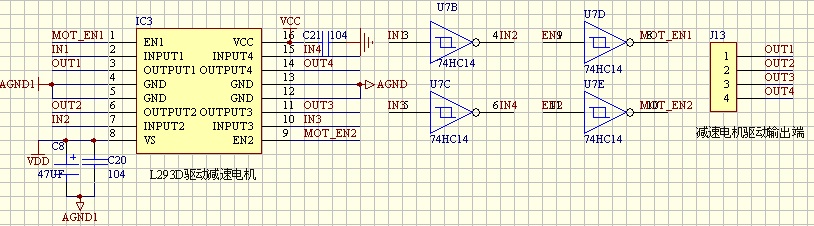
��̙C(j��)��(sh��)�� ��·�匍(sh��)��D 3.2�������·���O(sh��)Ӌ(j��)�cԭ�� �������·���������ܾ�ԮС܇ϵ�y(t��ng)�ĺ��Ŀ��Ʋ��֣���ؓ(f��)؟(z��)����·������̖�IJɼ���̎������������������Ӳ���·�M(j��n)���{(di��o)�������O(sh��)Ӌ(j��)���������ܾ�ԮС܇ϵ�y(t��ng)��STC89C52��Ƭ�C(j��)��Сϵ�y(t��ng)�·������ϵ�y(t��ng)�Ŀ����·��ͨ�^���N�������·���ɼ����N��������Ϣ���l(f��)�����N������̖������������(y��ng)�IJ�������Ƭ�C(j��)�����·ԭ��D����ʾ�� ��Ƭ�C(j��)�����·ԭ��D 3.3�Դ�·ԭ���c�O(sh��)Ӌ(j��) �Դ�·��ϵ�y(t��ng)�ṩ����(zh��n)�Դ��������ϵ�y(t��ng)������(w��n)�����P(gu��n)�I���ڣ���ϵ�y(t��ng)����7.2V�ɳ�늄���늳ؽM���ɳ�늷���(f��)���ã�����늳ؽM�����^��(qi��ng)������(q��)����������(w��n)����늉�ݔ�����ܣ���(j��ng)�yԇ���ô˷N��늷�ʽ�£���Ƭ�C(j��)�͂�����������(w��n)����ֱ��늙C(j��)�������á������·ԭ��D��D��ʾ�� 3.4늙C(j��)�(q��)���·��ԭ���c�O(sh��)Ӌ(j��) ���O(sh��)Ӌ(j��)�в��õ�늙C(j��)�����(q��)��оƬL293D��L293D�ǚW��������SGS��˾�Įa(ch��n)Ʒ����ΉK�����·����늉������������ͨ���(q��)�ӡ��O(sh��)Ӌ(j��)�Á�����DTL����TTL߉�ƽ���(q��)�Ӹ���ؓ(f��)�d(�����^�����ֱ��늙C(j��))�����_�P(gu��n)�Դ���w�ܡ���(n��i)������4ͨ��߉�(q��)���·�����~�����������1A�������_(d��)1.5A��Vss늉���С4.5V�������_(d��)36V�� ݔ�����_��ݔ�����_��߉�P(gu��n)ϵ L293d��ֱ�ӵČ�늙C(j��)�M(j��n)�п��ƣ��o횸��x�·��ͨ�^��Ƭ�C(j��)��I/Oݔ���׃оƬ���ƶ˵��ƽ�������Ԍ�늙C(j��)�M(j��n)�������D(zhu��n)��ֹͣ�IJ�������1����ʹ�ܶˡ�ݔ�����_��ݔ�����_��߉�P(gu��n)ϵ�����������dz����㣬���ܝM��ֱ���p��늙C(j��)�Ĵ����Ҫ���{(di��o)ԇ�r(sh��)�������ϱ����ó���ݔ�댦��(y��ng)�Ĵaֵ�������Ԍ�(sh��)�F(xi��n)����(y��ng)�IJ��������(q��)���·ԭ��D������ʾ�� 3.5�����·��ԭ���c�O(sh��)Ӌ(j��) ��������ʽ����_�P(gu��n)�M(j��n)�б��ϡ�����_�P(gu��n)��(sh��)�H�l(f��)���^�c�����^��һ�w�ęz�y�_�P(gu��n)���乤��ԭ���Ǹ���(j��)�l(f��)���^�l(f��)���Ĺ����������w���䣬�����^��(j��)�������Д��Ƿ����ϵK���(d��ng)�й⾀�����r(sh��)��ݔ�����ƽ����(d��ng)�]�й⾀�����r(sh��)��ݔ�����ƽ����Ƭ�C(j��)����(j��)�����^�ƽ�ĸߵ���������(y��ng)���ƣ�����С܇�����ϵK����ڽ��չ�ݔ��TTL�ƽ�������چ�Ƭ�C(j��)����̖��̎���� С܇����������ʽ�������M(j��n)�б��ϵ��·ԭ��D���D��ʾ��
����_�P(gu��n)�����·ԭ��D
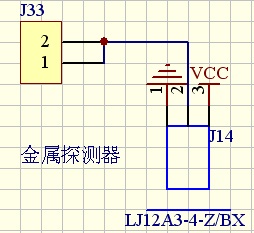
���Ϲ���_�P(gu��n)��(sh��)��D 3.6����_�P(gu��n)�İ��b �ڱ��ς��������O(sh��)Ӌ(j��)�У��҂���܇�w�ױP��ǰ���b���Ă����������Á����ϵ����á��Ă��������İ��bλ���c���b������һ�¡����w�İ��bλ�����ψD�� 3.7ѭ�E�·��ԭ���c�O(sh��)Ӌ(j��) ����RPR220��늌������ϵ�y(t��ng)ѭ�E�΄�(w��)��ѭ�E�·�����Ԍ�(sh��)�F(xi��n)С܇�������صĺ�ɫ��������(d��o)܉�EBC�M(j��n)��ǰ�M(j��n)��λ��У���ģ���С܇����ƫ�xԓ܉�E�����n�}�O(sh��)Ӌ(j��)�в������Ƶ�RPR220��늌������ϵ�y(t��ng)ѭ�E�΄�(w��)���������Ĕ�(sh��)��(j��)��ݔ����̖���_�P(gu��n)������ֱ���c��Ƭ�C(j��)��I/O���_���B�ӣ�Ӳ���·��(sh��)�F(xi��n)���^���Σ����`���ȿ���ͨ�^�{(di��o)��(ji��)��Ȧ�λ�{(di��o)�� ��ѭ�E�z�y�������O(sh��)Ӌ(j��)�У��҂���܇�w�ױP��ǰ���b�Ѓɂ����������Á�z�y��ɫ����܉�E����ѭ�Eǰ�M(j��n)�����á����w�İ��bλ�Ì�(sh��)��D���D��ʾ�� Ӳ���· ��(sh��)��D 3.8���ٙz�y�·��ԭ���c�O(sh��)Ӌ(j��) ���ق��������ܵĺÉČ���ԓϵ�y(t��ng)�Ĺ����Ƿ��܌�(sh��)�F(xi��n)������ʮ����Ҫ�����á��҂��x�õ���LJ12A3-4-Z/BX��̖��늸�ʽ�ӽ��_�P(gu��n)�M(j��n)�н��ٙz�y���������·ԭ�����D��ʾ�������䔵(sh��)��(j��)ݔ����ͨ�^5.1K������裬ݔ������TTL�ƽ��ݔ����̖���_�P(gu��n)������ֱ���c��Ƭ�C(j��)��I/O���_���B�ӣ�Ӳ���·���Σ����ײ�������ԭ��D������ʾ��
늸�ʽ�ӽ��_�P(gu��n)ԭ��D
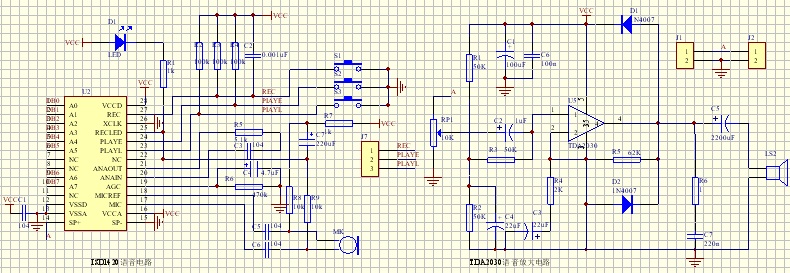
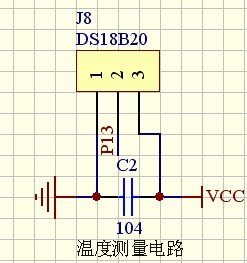
3.9�FƬ�D(zhu��n)���·ԭ���c�O(sh��)Ӌ(j��)�� �FƬ�D(zhu��n)���·��Ҫ�\(y��n)���˾�Ȧͨ늮a(ch��n)���ň���ԭ�������������a(ch��n)���Ĵň����ѽ��ق������z�y�����FƬ���}Ŀ��Ҫ���D(zhu��n)�Ƶ�ָ��λ�õIJ���Ҫ���O(sh��)Ӌ(j��)�·�в��õ��nj���Ȧ��ݔ���ֱ���c��Ƭ�C(j��)��I/O���B�ӣ�ͨ�^��׃��Ƭ�C(j��)���_�ĸߵ��ƽ�����Ԍ�(sh��)�F(xi��n)��Ȧ�д��Ե�׃���� 3.10�Z����ʾ�·��ԭ���c�O(sh��)Ӌ(j��) ���O(sh��)Ӌ(j��)�е����ܾ�ԮС܇���Z����ʾϵ�y(t��ng)��IDS1420䛷���ģ�K���ʷŴ��·�M���Z����ʾ�·��Ҫ�Á���ʾ��ԮС܇�Ĺ�����B(t��i)��IDS1420�Z���·���ʷŴ��·��ԭ��D������ʾ�� IDS1420�Z���·ԭ��D 3.11ϵ�y(t��ng)�������ܵĔU(ku��)չ 1.����DS18B20�y���h(hu��n)���ضȡ��y���·��Ҫ�������Á�y���h(hu��n)���ضȲ�ͨ�^Һ���@ʾ����ϵ�y(t��ng)�y���·��������dallas��˾��ds18b20��(sh��)�֜ضȂ�������(sh��)�F(xi��n)�ضȵĜy���@�N�������w�eС��ʹ��늉������y���ضȷ�����-55�z�϶ȵ�125�z�϶ȣ�һ�����Ĕ�(sh��)�ַ�ʽ���ͣ���������ϵ�y(t��ng)�Ŀ��ɔ_������ϵ�y(t��ng)ԭ��D���D��ʾ 2.ͨ�^�o���b���·��(sh��)�F(xi��n)С܇�ğo�����ƺͲ����� �o���b���·��Ҫ��(sh��)�F(xi��n)С܇�ğo��������ϵ�y(t��ng)�ɰl(f��)��ͽ��ՃɴֽM�ɣ��Ɇ�Ƭ�C(j��)�M(j��n)�п��Ʋ����� 3.ͨ�^���a�P�y��С܇�ٶȺ�·�̹��ܡ� ��늴a�P��32�ݺڰ����g�ĈA�P������o�N��܇݆�ă�(n��i)��(c��)�����X�Ͻ�܇���ϴ�һ���A�ף�RPR220��늌���ͨ�^�A����늴a�P�M(j��n)�Йz�y�Ϳ��Եõ�܇݆�D(zhu��n)�^��Ȧ��(sh��)���Ķ�Ӌ(j��)���С܇ǰ�M(j��n)��·�̡� ܇݆��ֱ����6cm��܇݆�����L�� L��2*��*R��2*3.14*0.03=8.85cm ��늴a�P��ƽ���ֳ���36�ݣ�ÿһ�ݵĻ��L�� L=L/36=18.85cm/36=0.52cm ���O(sh��)��Ƭ�C(j��)�z�y���ڰ���̖��׃����n���t С܇���^��·�̞�S��n*0.52cm
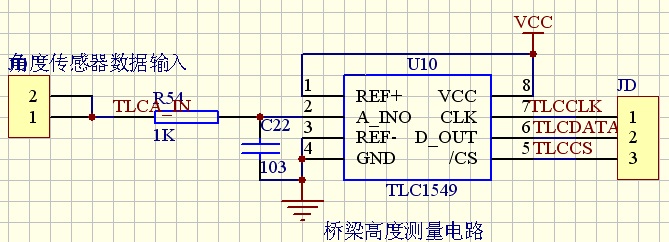
4.ͨ�^�A�ǂ������y���Ƕȹ��ܡ� �A�ǂ�����ͨ�����ڜy���ǶȺ�б�µĸ߶ȣ��ھ�ԮС܇ϵ�y(t��ng)���O(sh��)Ӌ(j��)�У��҂���WQH36-45�A�ǂ������y��б�µĸ߶ȣ����Dz��ø����ܴ�����Ԫ�������������Y(ji��)��(g��u), �ɟo늽��|�c(di��n)�Ĝy���Aб�Ƕȡ������w�eС���`���ȸߡ������L������ӡ��ͭh(hu��n)����Ⱦ����ˮ���ͺ��N���ӭh(hu��n)����.�e�m�� �����\(y��n)���l�����ϵ�ˮƽ�ˑB(t��i)�ǶȵĜy�غ�ƽ�涨λ�ȹ������ϡ���ԭ��D������ʾ��
5.����ADC0832�M�ɵ�늉��y���·����ͨ�^Һ���@ʾ��ԮС܇ϵ�y(t��ng)늳ؽM��늉�����5.5��늉�������5.5��(b��o)����ʾ��늡� �ġ�ܛ���O(sh��)Ӌ(j��)�Č�(sh��)�F(xi��n)�c�f�� 4.1���������̈D �҂����O(sh��)Ӌ(j��)��ܛ�������������̈D���D��ʾ��
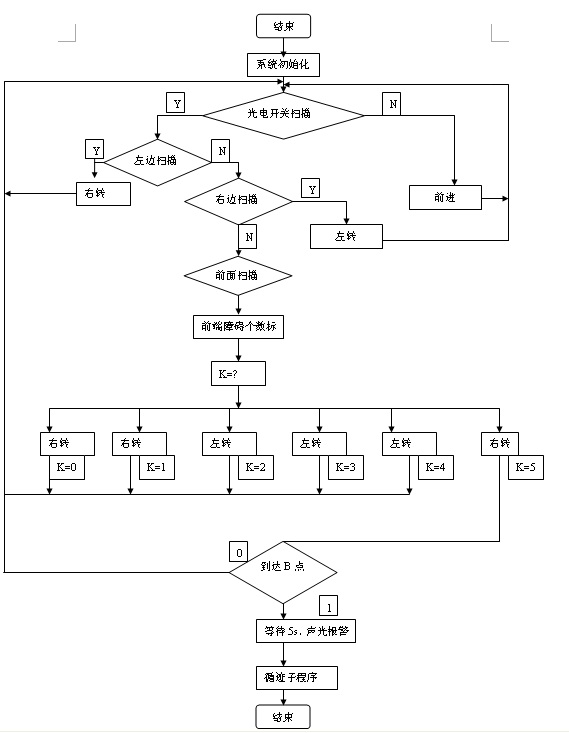
4.2·��ѭ�E�ӳ������̈D 
- #include"reg51.h"
- #define uchar unsigned char
- #define uint unsigned int
- #define forward 0x5f
- #define back 0x0f
- #define right 0x4f
- #define left 0x1f
- #define stop 0xff
- #define bleft 0x9f
- #define bright 0x6f
- sbit cs_245=P3^4; //����_�P(gu��n)��̖ݔ��ʹ�ܶ�
- sbit c=P1^2; //�D(zhu��n)���ʹ�ܶ�
- sbit baojing=P1^4; //��(b��o)������λ
- sbit jdq=P3^1; //ץ���ٿ���λ
- sbit js=P3^0; //����̽�yλ
- uchar code lcd[]={0x30,0x31,0x32,0x33,0x34,0x35,0x36,0x37,0x38,0x38,0x39}; //Һ���@ʾ���a
- uchar date1=0,second=0,minute1=0,minute2=0; //�r(sh��)�g
- uchar number1=0 ,number=0; //�ϵK���(bi��o)־����(sh��)
- /**********************/
- /*늙C(j��)���Ʋ���*/
- /*********************/
- void run_forward() //��ǰ�\(y��n)��
- { P2=forward;delay(1000); display(); }
- void run_back() //����\(y��n)��
- { P2=back; delay(1000); display(); }
- void run_left() //��ǰ���D(zhu��n)
- { P2=left; delay(2500); display(); }
- void run_right() //��ǰ���D(zhu��n)
- { P2=right; delay(2000);display();}
- /* ���E�ӳ���
- void xunji()
- { uchar temp=0 ; cs_245=0;
- temp=P0&0xc0; //���ęz�y
- switch(temp)
- { case 0xc0:{ run_forward(); deng(forwardd);cs_245=0;} break;// case 0x80:{run_left(); run_right();deng(rightd); cs_245=0;} break;
- case0x40:{run_right(); run_left();deng(leftd);cs_245=0;} break;//right
- default :break;}
- }
- /*�����ӳ���
- void bizhang()
- { uchar temp2=0��c1=0,c2=0,c3=0,c4=0,c5=0,c6=0,c7=0; ;
- cs_245=0;
- temp2=P0&0x38; //�z�y�ϵK
- switch(number) //�ϵK��Ă���(sh��)�Д���������(y��ng)���D(zhu��n)��
- { case 1:{ run_forward(); deng(forwardd);cs_245=0;} break;
- case 2:{ run_right();deng(rightd); cs_245=0;} break;
- case 3:{ run_left();deng(leftd);cs_245=0;} break;
- case 4:{ run_forward(); deng(forwardd);cs_245=0;} break;
- case 5:{ run_right();deng(rightd); cs_245=0;} break;
- default :break; }
- }
- //�r(sh��)�g�@ʾ����(sh��)
- void display()
- { uchar lcd1[1]=0,lcd2[1]=0,lcd3[1]=0,lcd4[1]=0;
- lcd1[0]= lcd[date1];//m1
- lcd2[0]=lcd[second];//m2
- lcddisplay2(lcd1,lcd2,lcd3, lcd4 )}
- void star()
- {TMOD=0x11;IE=0x8b;} //���r(sh��)����
- //������(sh��)
- void main(void)
- { star(); //���r(sh��)���ij�ʼ��
- while(1)
- { xunji(); //���E�ӳ���
- bizhang(); //�����ӳ���
- }
- }
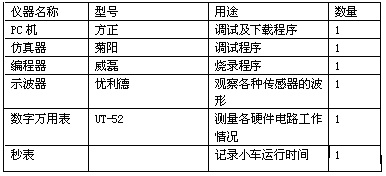
�塢ϵ�y(t��ng)���ܜyԇ 5.1ʹ�Ãx�����O(sh��)����ε��f�� �����O(sh��)Ӌ(j��)��ʹ�õ����P(gu��n)�x��������±���ʾ ʹ�Ãx�����O(sh��)���б� 5.2ϵ�y(t��ng)���ܜyԇ 5.2.1����Ҫ�ֵĹ��ܜyԇ (1) ��Ҏ(gu��)���Ĉ���(n��i)���ܾ�ԮС܇��A�T�M(j��n)�룬�Ԅ��x��·����B�T������С܇���·����ʾ��D������ʾ�� 5.2.2�l(f��)�]���ֵĹ��ܜyԇ ��ԮС܇��B�T��λ��ͨ�^ѭ�E�·������ɫ����(d��o)��BCǰ�M(j��n)���ڽ��ق������z�y���FƬD�r(sh��)����Ƭ�C(j��)��������(y��ng)���·���FƬ�����D(zhu��n)�Ƶ�ָ����λ�ã����@���^���І�Ƭ�C(j��)ͬ�r(sh��)��������(y��ng)���·�l(f��)���Z���Ͱl(f��)����ʾ��ָʾ���ܾ�ԮС܇����ɾ�Ԯ�΄�(w��)�����ܾ�ԮС܇�ڌ�(sh��)�F(xi��n)�l(f��)�]���֕r(sh��)������·��ʾ��D������ʾ�� С܇�l(f��)�]���ֹ��ܼ��������ܜyԇ �yԇ���E���£� ��1�����Ȱ�С܇���ڈ��ص����̎�������}Ŀ��Ҏ(gu��)����Ҫ�����ܾ�ԮС܇��A�T�M(j��n)���Ԅ��x��·����B�T������������^���У���ԮС܇�����Ԅ��x��·�����ߣ�������·�����ψD��ʾ�����ܾ�ԮС܇��A�T�M(j��n)����_ʼӋ(j��)�r(sh��)����ͨ�^Һ���@ʾ���@ʾ��ԮС܇ϵ�y(t��ng)�����ĵĕr(sh��)�g���ُ�B�T�����������M(j��n)�^���У���ԮС܇�����Ԅӱ��_���ڣ��ҵ�ͨ·�������������֮��(n��i)��ɵ��_(d��)B�T��Ҫ����B�T̎��С܇�z�y����ɫ��(bi��o)־��С܇ֹͣ�\(y��n)�У�ͬ�r(sh��)�l(f��)���⣬��ʾ�������֜yԇ�ꮅ�� ��2����ԮС܇��B�T�⣬ͨ�^ѭ�E��ɫ��������(d��o)��BCǰ�M(j��n)������(d��o)܉�E��2����������ѭ�E��ɫ��������(d��o)��;�У�ͨ�^�ӽ��_�P(gu��n)�·�z�y���FƬD�r(sh��)ͣ܇3�루ע�⣺�FƬD������܉�EBCǰ����֮һ���ϵ�����λ�ã��������Z���·�l(f��)���Z����ʾ����LED�l(f��)���·�l(f��)����ʾ����Ƭ�C(j��)ͨ�^���ق������·�ɼ���������Ϣ�r(sh��)��ͨ�^��������(y��ng)�ĴŸБ�(y��ng)�·��ͨ�a(ch��n)���ň������þ�Ȧͨ늕r(sh��)�ɮa(ch��n)���ň���ԭ������FƬ�������FƬ֮����ق������ęz�y��̖���ٰl(f��)��׃������ԮС܇?y��n)^�m(x��)�غ�ɫ����(d��o)܉�Eǰ�M(j��n)����(d��ng)��ԮС܇���_(d��)��ɫ��������(d��o)܉�E���ĽK�c(di��n)C֮��С܇ͨ�^RPR220��늌����·֪ͨ��Ƭ�C(j��)��ԮС܇����ɱ��ξ�Ԯ�΄�(w��)����Ƭ�C(j��)ͨ�^��������(y��ng)��늙C(j��)�(q��)���·ֹͣ늙C(j��)���\(y��n)�У�ͨ�^��׃����(y��ng)�ĴŸБ�(y��ng)�·���ƽ��B(t��i)�����FƬD��Һ���@ʾ�·�քe�@ʾ���^BD��DC��܉�E�����ĵĕr(sh��)�g��ͬ�r(sh��)�ڴ��^���У���Ƭ�C(j��)�����Z���·�Ͱl(f��)����O�ܰl(f��)���·ͬ�r(sh��)�l(f��)���Z���Ͱl(f��)�����ʾ��ָʾ��ԮС܇�ľ�Ԯ�΄�(w��)�Y(ji��)������ԮС܇ϵ�y(t��ng)�yԇ�ľ��w����(sh��)Ҋ�±����� ���ܾ�ԮС܇ϵ�y(t��ng)�Ĺ��܅���(sh��)�б��� ��������?j��n)?sh��)��(j��)����(sh��) | ����ڶ˵����ڶ����r(sh��)�g��s�� | | ��B��ͣ���l(f��)������ʾ�ĕr(sh��)�g��s�� | | | | | | | | | | | | | | | | | | | | |
�l(f��)�]����?j��n)?sh��)��(j��)����(sh��) | ��B�˵��FƬD�c(di��n)���r(sh��)�g(s) | ���FƬD�c(di��n)ͣ���r(sh��)�g(s) | ���FƬD�c(di��n)̎���K�c(di��n)C���Õr(sh��)�g(s) | ��C�c(di��n)ͣ���ĕr(sh��)�g(s) | ��C�c(di��n)̎ͣ���l(f��)������ʾ�ĕr(sh��)�g(s) | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | |
�����Y(ji��)Փ �yԇ������С܇�܉��^�õ�����}ĿҪ��Ļ���Ҫ��Ͱl(f��)�]���֡�ͬ�r(sh��)�����ܾ�ԮС܇����ɫ�ǣ�����_�P(gu��n)�Д������Ĝ�(zh��n)�_��RPR220��늌����ܷ�(w��n)�������ѭ�E����ԮС܇��(y��ng)����늸�ʽ�ӽ��_�P(gu��n)�z�y�FƬ����(j��ng)�yԇ�҂��l(f��)�F(xi��n)��z�y���ٜ�(zh��n)�_���`�����^�ߣ�Һ���@ʾЧ�����ã��Z������(b��o)���������ܾ�ԮС܇ϵ�y(t��ng)�\(y��n)����������ģ�K�·����(sh��)��(w��n)�����^�õ�������}Ŀ����Ҏ(gu��)���Ļ������ֺͰl(f��)�]���֣�ϵ�y(t��ng)߀�U(ku��)չ���������ù��ܣ���ض��@ʾ�ȡ�
�ڱ����O(sh��)Ӌ(j��)��ِ�У���ͨ�^�҂���ͬ��Ŭ�����҂���������ܾ�ԮС܇ϵ�y(t��ng)���O(sh��)Ӌ(j��)�c���������O(sh��)Ӌ(j��)�еľ�ԮС܇������˴�ِ�}ĿҪ��Ĵֹ��ܣ�ͬ�r(sh��)Ҳ������҂��Ą�(chu��ng)�����R�͈F(tu��n)�(du��)�������R�����B(y��ng)���҂��J(r��n)��������}����(d��)����Q���}��������얹����҂������W(xu��)��Փ�Č�(sh��)�H�\(y��n)�á�߀呟����҂��Ą���(sh��)�`������ʹ�҂���������������ИI(y��)���^�m(x��)�W(xu��)��(x��)��ȥ�� �ڱ�ِ��������ҹ��Ŭ��ƴ���У�����˜\���K���y�����҂����H�����һ����Ʒ�����ҡ��҂����{(di��o)ԇ���^���������˲��ن��}�����ڱ��ϡ�ѭ�E�����ٙz�y�Ȇ��}�ϣ�ͨ�^��ҵĹ�ͬŬ���о����}����Q�����Ӵ˴θ�ِ���҂����f��һ�Ό��F��(j��ng)�v��Ҳ��������һ�P����ؔ(c��i)������(d��ng)Ȼ�������҂���֪�R������ˮƽ���ޣ���Щ�ط�߀���Ǻ����ƣ�ϵ�y(t��ng)Ҳ����һ����ȱ�ݺͲ����Ƶĵط�����Ո��λ�ώ����uָ�����Ա��҂���һ�����ĸ��á�
������Word��ʽ�ęn51�����d��ַ��
 ����С܇��������.rar
(1.9 MB, ���d��(sh��): 20)
����С܇��������.rar
(1.9 MB, ���d��(sh��): 20)
2019-5-14 09:02 �ς�
�c(di��n)���ļ������d����
���d�e��: �ڎ� -5
| 




 ����TQQ:125739409;���g(sh��)����QQȺ281945664
����TQQ:125739409;���g(sh��)����QQȺ281945664










 QQ���Ѻ�Ⱥ
QQ���Ѻ�Ⱥ QQ���g
QQ���g �vӍ��
�vӍ�� �vӍ����
�vӍ���� �ղ�
�ղ� ����
���� �
� ��
��