|
( 1 ) 比例的作用
比例作用的引入是為了及時(shí) 但是在接近穩(wěn)態(tài)區(qū)域時(shí),如果比例系數(shù)選擇過大, 則會(huì)導(dǎo)致過大的超調(diào), 甚至可能帶來系統(tǒng)的不穩(wěn)定。
( 2 ) 積分的作用
積分作用的引入主要是為了 保證 輸出值y ( t ) 在穩(wěn)態(tài)時(shí) 對(duì)設(shè)定值r ( t ) 的無靜差跟蹤。積分作用的引入,能消除系統(tǒng)靜差,但是在系統(tǒng)響應(yīng)過渡過程的初期,一般偏差比較大, 如果不選取適當(dāng)?shù)姆e分系數(shù), 就可能使系統(tǒng)相應(yīng)過程出現(xiàn)較大的超調(diào)或者引起積分飽和現(xiàn)象。
( 3 ) 微分的作用
微分作用的引入主要是為了改善閉環(huán)系統(tǒng)的穩(wěn)定性和動(dòng)態(tài)響應(yīng)速度。 因?yàn)槲⒎窒禂?shù)主要是影響系統(tǒng)誤差變化速率的, 它主要是在系統(tǒng)相應(yīng)過程中當(dāng)誤差向某個(gè)方向變化時(shí)起制動(dòng)作用,提前預(yù)報(bào)誤差的變化方向,能有效地減小超調(diào)。但是如果微分系數(shù)過大,就會(huì)使阻尼過大,導(dǎo)致系統(tǒng)調(diào)節(jié)時(shí)間過長(zhǎng)。
1/mydelay or ui=myadd(0)*a+myadd(-1)*b 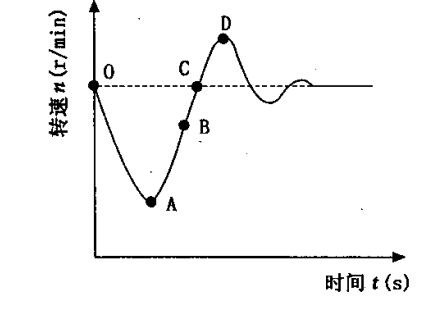
比例積分和微分 微分除掉剩下PI. ui=myadd(0)*a+myadd(-1)*b PID控制器參數(shù)的工程整定方法,主要有臨界比例法、反應(yīng)曲線法和衰減法。 三種方法各有其特點(diǎn),其共同點(diǎn)都是通過試驗(yàn),然后按照工程經(jīng)驗(yàn)公式對(duì)控制器參數(shù)進(jìn)行整定。但無論采用哪一種方法所得到的控制器參數(shù),都需要在實(shí)際運(yùn)行中進(jìn)行最后調(diào)整與完善。 現(xiàn)在一般采用的是臨界比例法。利用該方法進(jìn)行PID控制器參數(shù)的整定步驟如下: (1)首先預(yù)選擇一個(gè)足夠短的采樣周期讓系統(tǒng)工作﹔ (2)僅加入比例控制環(huán)節(jié),直到系統(tǒng)對(duì)輸入的階躍響應(yīng)出現(xiàn)臨界振蕩,記下這時(shí)的比例放大系數(shù)和臨界振蕩周期﹔ (3)在一定的控制度下通過公式計(jì)算得到PID控制器的參數(shù)。
PID參數(shù)的設(shè)定:是靠經(jīng)驗(yàn)及工藝的熟悉,參考測(cè)量值跟蹤與設(shè)定值曲線,從而調(diào)整P\I\D的大小。
PID控制器參數(shù)的工程整定,各種調(diào)節(jié)系統(tǒng)中P.I.D參數(shù)經(jīng)驗(yàn)數(shù)據(jù)以下可參照:
溫度T: P=20~60%,T=180~600s,D=3-180s
壓力P: P=30~70%,T=24~180s,
液位L: P=20~80%,T=60~300s,
流量L: P=40~100%,T=6~60s。
書上的常用口訣:
參數(shù)整定找最佳,從小到大順序查
先是比例后積分,最后再把微分加
曲線振蕩很頻繁,比例度盤要放大
曲線漂浮繞大灣,比例度盤往小扳
曲線偏離回復(fù)慢,積分時(shí)間往下降
曲線波動(dòng)周期長(zhǎng),積分時(shí)間再加長(zhǎng)
曲線振蕩頻率快,先把微分降下來
動(dòng)差大來波動(dòng)慢。微分時(shí)間應(yīng)加長(zhǎng)
理想曲線兩個(gè)波,前高后低4比1
一看二調(diào)多分析,調(diào)節(jié)質(zhì)量不會(huì)低
利用Ziegler-Nichols方法進(jìn)行PID參數(shù)設(shè)置
在實(shí)際應(yīng)用中,我們盡量避免使用高深復(fù)雜的數(shù)學(xué)公式,希望能使經(jīng)驗(yàn)法更多的發(fā)揮能力,這樣既可以節(jié)省很多時(shí)間,也可以通過經(jīng)驗(yàn)的傳授使更多的工程師或工人可以掌握一種簡(jiǎn)單有效的方法來進(jìn)行PID控制器的調(diào)節(jié)。 傳統(tǒng)的PID經(jīng)驗(yàn)調(diào)節(jié)大體分為以下幾步: 1. 關(guān)閉控制器的I和D元件,加大P元件,使產(chǎn)生振蕩。 2. 減小P,使系統(tǒng)找到臨界振蕩點(diǎn)。 3. 加大I,使系統(tǒng)達(dá)到設(shè)定值。 4. 重新上電,觀察超調(diào)、振蕩和穩(wěn)定時(shí)間是否符合系統(tǒng)要求。 5. 針對(duì)超調(diào)和振蕩的情況適當(dāng)增加微分項(xiàng)。 以上5個(gè)步驟可能是大家在調(diào)節(jié)PID控制器時(shí)的普遍步驟,但是在尋找合時(shí)的I和D參數(shù)時(shí),并非易事。如果能夠根據(jù)經(jīng)典的Ziegler-Nichols(ZN法)公式來初步確定I和D元件的參數(shù),會(huì)對(duì)我們的調(diào)試起到很大幫助。 John Ziegler和Nathaniel Nichols發(fā)明了著名的回路整定技術(shù)使得PID算法在所有應(yīng)用在工業(yè)領(lǐng)域內(nèi)的反饋控制策略中是最常用的。Ziegler-Nichols整定技術(shù)是1942年第一次發(fā)表出來,直到現(xiàn)在還被廣泛地應(yīng)用著。 所謂的對(duì)PID回路的“整定”就是指調(diào)整控制器對(duì)實(shí)際值與設(shè)定值之間的誤差產(chǎn)生的反作用的積極程度。如果正巧控制過程是相對(duì)緩慢的話,那么PID算法可以設(shè)置成只要有一個(gè)隨機(jī)的干擾改變了過程變量或者一個(gè)操作改變了設(shè)定值時(shí),就能采取快速和顯著的動(dòng)作。
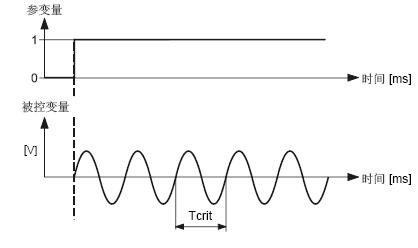
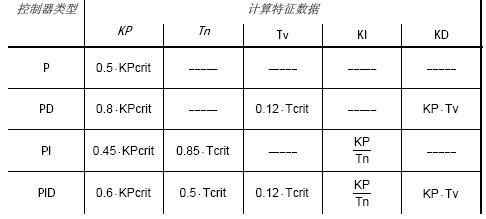
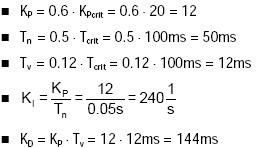
相反地,如果控制過程對(duì)執(zhí)行器是特別地靈敏而控制器是用來操作過程變量的話,那么PID算法必須在比較長(zhǎng)的一段時(shí)間內(nèi)應(yīng)用更為保守的校正力。回路整定的本質(zhì)就是確定對(duì)控制器作用產(chǎn)生的過程反作用的積極程度和PID算法對(duì)消除誤差可以提供多大的幫助。 經(jīng)過多年的發(fā)展,Ziegler-Nichols方法已經(jīng)發(fā)展成為一種在參數(shù)設(shè)定中,處于經(jīng)驗(yàn)和計(jì)算法之間的中間方法。這種方法可以為控制器確定非常精確的參數(shù),在此之后也可進(jìn)行微調(diào)。 Ziegler-Nichols方法分為兩步: 1. 構(gòu)建閉環(huán)控制回路,確定穩(wěn)定極限。 2. 根據(jù)公式計(jì)算控制器參數(shù)。 穩(wěn)定極限是由P元件決定的。當(dāng)出現(xiàn)穩(wěn)態(tài)振蕩時(shí)就達(dá)到了這個(gè)極限。產(chǎn)生了臨界系數(shù)Kpcrit和臨界振蕩周期Tcrit。 確定臨界系數(shù)Kpcrit和臨界振蕩周期Tcrit后,根據(jù)下表的公式,計(jì)算其他參數(shù): 根據(jù)上述方法,舉例說明: 1. 假設(shè)Kpcrit=20 2. Tcrit=100ms 確定PID控制器的P、I、D元件的系數(shù)以及積分時(shí)間內(nèi)Tn和微分時(shí)間Tv。 優(yōu)化PID控制器的參數(shù): 綜上可以看書,在調(diào)試PID控制器時(shí),如果應(yīng)用Ziegler-Nichols方法,可以快速、精確的算出相應(yīng)的各參數(shù)數(shù)值,再之后只需進(jìn)行微調(diào)便可得到理想的控制效果。 |
完整的Word格式文檔51黑下載地址:
 pid的基本知識(shí)大全.docx
(67.19 KB, 下載次數(shù): 29)
pid的基本知識(shí)大全.docx
(67.19 KB, 下載次數(shù): 29)
2019-4-17 09:52 上傳
點(diǎn)擊文件名下載附件
PID 下載積分: 黑幣 -5
| 









 QQ好友和群
QQ好友和群 QQ空間
QQ空間 騰訊微博
騰訊微博 騰訊朋友
騰訊朋友 收藏
收藏 淘帖
淘帖 頂
頂 踩
踩
