��ƪ�������M(f��i)�����o��ң��@ƪ���½Y(ji��)�ϹP�����W(xu��)�Լ������υ���������v�⣬ͨ�^(gu��)�Լ��������������ęn���ڴ����M(f��i)�����o��ң����ڹP����һ�����x�W(xu��)���������y���в���(d��ng)֮̎�������e(cu��)�`�������ָ���������ҕ�(hu��)��Դ�ęn��Դ������ڸ����У��кڎŵ�ֱ�����d���](m��i)�е������]�䣬��Ҋ(ji��n)��
SG90��C(j��)��ģ�M��C(j��)�� һ���ճ��²��~~~~~~~�����_(k��i)ʼ��������}֮ǰ��ռ�ô��һЩ�r(sh��)�g�������R��һ����$##%%%$%#$#$$%^�H������������.����ѽ��ѽ���R�����c(di��n)�����^(gu��)��(l��i)�ˣ��~~�ޣ������������ˣ������ˣ���
���ܾ����˹��ˣ��㲻�úôa�֣��Rʲô���أ��f(shu��)��(l��i)�M������߅���R���˾����P���Լ����������{(di��o)ԇ����ĕr(sh��)��(du��)�����@��(g��)����C(j��)����ô�����D(zhu��n)�������z��Ӳ��---�z�����---�ٶȣ���˷���(f��)NС�r(sh��)��ʼ�K�Ҳ�����(w��n)�}���ڣ������أ���ô������ô����Ӳ���أ���ô������ô�����f(shu��)�Ǽ������ǿ죬��W���Q�����ΩӰ��ž��һ��(g��)��(sh��)��1ˤ��Ę�ϣ����Ǻ������ٴ��_(k��i)�n����ž~ž~ž����(sh��)��0��1�����X����һ�ģ���ѽ��һ�����@�e(cu��)�`�ˣ����������W�W�l(f��)�������(bi��o)���쾚�Ĵ��_(k��i)Keil4,һ�β������绢��ֻ (t��ng)Ҋ(ji��n)��֨~֨~֨~֨����C(j��)������~~~~
���Ĵ��������r(sh��)��0��(du��)��(y��ng)���ж˿�----void Timer() interrupt 1
�R��������Ҍ�(xi��)�����@�ӣ�void Timer() interrupt 0.
�Ҷ����e(cu��)�ˣ��˼�զ���ܽo���X(qi��n)�����һ��Ҫ���Ԟ�䣬��(x��)�ļ�(x��)���ټ�(x��)��
�Д�̖(h��o)
| �Д�Դ
| 0
| �ⲿ�Д�0
| 1
| ���r(sh��)����0
| 2
| �ⲿ�Д�1
| 3
| ���r(sh��)����1
| 4
| �����1
|
ע����C�Z(y��)�����P(gu��n)�I�֡�interrupt+��(sh��)�֡���(l��i)����R�����Д���ڵ�ַ
��������������������������������������������������������������������
���ϷDZ��ιPӛ���c(di��n)��ֻ�ǹP��һ�c(di��n)СС���²ۣ����һ�c(di��n)СС��֪�R(sh��)
��������������������������������������������������������������������
���������Lj�(ch��ng)�������1.��C(j��)����C(j��)��һ�Nλ�ã��Ƕȣ��ŷ����(q��)��(d��ng)�����m����Щ��Ҫ�ǶȲ���׃�������Ա��ֵĿ���ϵ�y(t��ng)����C(j��)ֻ��һ�Nͨ�Ľз����䌍(sh��)�|(zh��)��һ��(g��)�ŷ��R�_(d��)��
2.ģ�M��C(j��)����Ҫ����İl(f��)��Ŀ�ĵ�PWM��̖(h��o)���������D(zhu��n)��ָ��λ�á����磺�ҬF(xi��n)�������D(zhu��n)90�ȣ��Ҿ���Ҫ����İl(f��)��90�ȵ�PWM��̖(h��o)ֱ�����_(d��)ָ��λ�ò���ֹͣ��
3.��(sh��)����C(j��)��ֻ��oһ��(g��)Ŀ�ĵ�PWM��̖(h��o)���������D(zhu��n)��ָ��λ�á����磺�ҬF(xi��n)�������D(zhu��n)90�ȣ���ֻ��Ҫ�l(f��)��һ��90�ȵ�PWM��̖(h��o)�����Ϳ������D(zhu��n)��90�ȡ�
4.PWM��̖(h��o)��PWM���}�_�����{(di��o)�ƣ�������̎�����Ĕ�(sh��)��ݔ����(l��i)��(du��)ģ�M�·�M(j��n)�п��Ƶ�һ�N�dz���Ч�ļ��g(sh��)����ôʲô��PWM��̖(h��o)�أ��P�߾ͺ�(ji��n)�ε�Մһ���Լ��Ŀ������҂���֪�����҂���ʹ�õĆ�Ƭ�C(j��)������(sh��)���·������I/O��ֻ�ЃɷN��B(t��i)���Ǿ��Ǹ��ƽ��1�������ƽ��0����֪�����@Щ֮���҂�ͨ�^(gu��)����̎����ݔ��1-0-1-0-1-0-1-0�������ѭ�h(hu��n)����(f��)���ͳɞ��D1��ʾ����r���@����PWM��̖(h��o)��
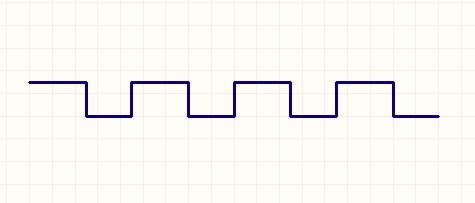
�D1.PWM��̖(h��o)
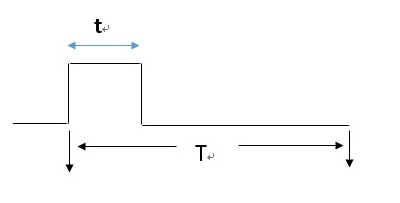
5.ռ�ձ������ƽ�����ߵ��ƽ��ռ����(g��)���ڵĕr(sh��)�g�ͽ���ռ�ձȡ�
6.PWM�l����PWM�l����ָÿ�����̖(h��o)�ĸ��ƽ�����ƽ�ٵ����ƽ�ĴΔ�(sh��)��
����ԭ�� �������ϵĸ����(du��)�҂�����(l��i)�ČW(xu��)��(x��)�Ƿdz��б�Ҫ�ģ�ϣ������ܺú���������ĸ��
����ʹ�õ�SG90��C(j��)�����D2��ʾ

�D2
�Ӿ�������
�t-------------------------VCC
��ɫ----------------------GND
��ɫ----------------------��̖(h��o)��
ԭ������C(j��)��(n��i)����һ��(g��)����(zh��n)늉���̎�����a(ch��n)����PWM��̖(h��o)ͨ�^(gu��)��̖(h��o)���M(j��n)���C(j��)�a(ch��n)��ֱ��ƫ��늉����c��C(j��)��(n��i)���Ļ���(zh��n)늉������^���@��늉���ݔ����늉������ؓ(f��)ݔ����늙C(j��)�(q��)��(d��ng)оƬ�ϣ��Ķ��Q�������D(zhu��n)����(d��ng)��C(j��)�_(k��i)ʼ���D(zhu��n)�ĕr(sh��)��C(j��)��(n��i)��ͨ�^(gu��)��(j��)(li��n)�p���X݆����(d��ng)�λ�����D(zhu��n)��ʹ��늉�����㣬늙C(j��)ֹͣ�D(zhu��n)��(d��ng)��
���c(di��n)������һ��(g��)��Ƭ�C(j��)����(xi��)�ߣ����w��ԭ�����҂�����Ҫ��������҂�ֻ��֪����ο��������ɣ������v����ο��ƶ�C(j��)�\(y��n)�D(zhu��n)��
��һ�����҂���Ҫʹ�Æ�Ƭ�C(j��)�a(ch��n)�����ڞ�20ms�����ƽt����0.5ms-2.5ms֮�g���@��һ��(g��)���������r(sh��)��+�Д�a(ch��n)���@�ӵķ�����
���ƽ��һ��(g��)������20ms���ij��m(x��)�r(sh��)�g��(du��)��(y��ng)�Ķ�C(j��)�Ƕȣ����D��ʾ��
���ƽtռ����(g��)����T��20ms���ĕr(sh��)�g
| ��C(j��)���D(zhu��n)�ĽǶ�
| 0.5ms
| 0��
| 1ms
| 45��
| 1.5ms
| 90��
| 2ms
| 135��
| 2.5ms
| 180��
|
�ڶ�������(ji��n)���vһ�¾���˼��ɣ�����ʹ�õ��Ƿ����Ƕ��r(sh��)��+�Д࣬���r(sh��)��ÿ0.5ms�Д�һ�Σ���Ҫ�Д�40�β����_(d��)��20ms���҂��˕r(sh��)��Ҫһ��(g��)ȫ��׃����(l��i)ӛ��Д�ĴΔ�(sh��)����(d��ng)�Д��_(d��)��40�Εr(sh��)��ȫ��׃���������㡣��(d��ng)�Д�Δ�(sh��)С��a�r(sh��)����̖(h��o)��ݔ�����ƽ����tݔ���㡣�˕r(sh��)a��ֵ��(du��)��(y��ng)�P(gu��n)ϵ���£�1--0�ȣ�2--45�ȣ�3--90�ȣ�4--135�ȣ�5--180�ȣ���
�������������v������һ��(g��)�Z(y��)��ĺ��x
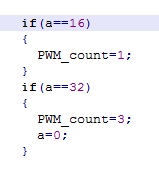
��ʲô��̎Ҫ��̎a==16��a==32�����ȣ��@��(g��)ֵ����һ�����y(c��)ԇ����(l��i)�ģ�����㿴Ҋ(ji��n)Դ�����Ԓ��������Ԕ��(x��)�Ľ�B����̎����٘����
�҂�֪��SG90��һ��(g��)ģ�M��C(j��)����Ҫ����Ľo����̖(h��o)���ܵ��_(d��)ָ����λ�á����_(d��)�@��(g��)λ�ò�����һ�����͵ģ�����Ҫ�r(sh��)�g����(sh��)�H�����a==16���ஔ(d��ng)���ӕr(sh��)���@�Εr(sh��)�g�����܉���C(j��)�_(d��)��ָ����λ�ã�Ȼ���ڽ�����һ��(g��)��?c��i)[����a==32������?y��n)�����Ҫ���?l��i)��?c��i)[��(d��ng)�ĕr(sh��)�g��(du��)�Q(ch��ng)�����Բ���a==32�ġ����dȤ�Ŀ��Ը�׃a��ֵ���^��һ�¾��w����r��
�����̎�����N����(l��i)���r(sh��)�g�o�ȣ��ҕ�(hu��)���ڸ����У��кڎŵ�ֱ�����d���](m��i)�еģ������]��
��Ƭ�C(j��)Դ��������:
- #include<reg52.h>
- sbit SG_PWM=P0^0;
- unsigned char count=0;
- unsigned char PWM_count=3; //1--0�ȣ�2--45�ȣ�3--90�ȣ�4--135�ȣ�5--180��
- unsigned char a=0;
- void Timer_Init()
- {
- TMOD=0X01; //T0���r(sh��)��ʽ1
- TH0=0Xfe;
- TL0=0X33; //Ӌ(j��)��(sh��)��ֵ�O(sh��)�Þ�0.5ms
- ET0=1; //���_(k��i)���r(sh��)��0����
- TR0=1; //���_(k��i)���r(sh��)��0
- EA=1; //�_(k��i)����
- }
- void Timer() interrupt 1 //�eע���̎��0--�ⲿ�Д�0��1--���r(sh��)���Д�0��2--�ⲿ�Д�1��3--���r(sh��)���Д�1��4--���п��Д�1
- {
- TR0=0;
- TH0=0Xfe;
- TL0=0X33; //�����xӋ(j��)��(sh��)��ֵ��0.5ms
- if(count<=PWM_count)
- {
- SG_PWM=1;
- }
- else
- {
- SG_PWM=0;
- }
- count++;
- if(count>=40)
- {
- count=0;
- a++;
- }
- TR0=1;
- }
- void main()
- {
- Timer_Init();
- while(1)
- {
- if(a==16) //20�DZ��^������B؞��(d��ng)����20���τ�(d��ng)��Щ�S���B؞ 10�ĕr(sh��)����F(xi��n)�����r��15�ĕr(sh��)�����](m��i)�У�16���^����
- {
- PWM_count=1;
- }
- if(a==32)
- {
- PWM_count=3;
- a=0;
- }
- }
- }
ȫ���Y��51hei���d��ַ��
 SG90��C(j��)--�Ԅ�(d��ng)����.7z
(8.99 KB, ���d��(sh��): 1154)
SG90��C(j��)--�Ԅ�(d��ng)����.7z
(8.99 KB, ���d��(sh��): 1154)
2019-4-16 11:50 �ς�
�c(di��n)���ļ������d����
���d�e��: �ڎ� -5
SG90��C(j��)--���I����.7z
(9.62 KB, ���d��(sh��): 928)
2019-4-16 11:50 �ς�
�c(di��n)���ļ������d����
���d�e��: �ڎ� -5
 �\ՄSG90��C(j��).docx
(139.68 KB, ���d��(sh��): 464)
�\ՄSG90��C(j��).docx
(139.68 KB, ���d��(sh��): 464)
2019-4-16 11:48 �ς�
�c(di��n)���ļ������d����
���d�e��: �ڎ� -5
| 



 [��(f��)��朽�]
[��(f��)��朽�]

 ����TQQ:125739409;���g(sh��)����QQȺ281945664
����TQQ:125739409;���g(sh��)����QQȺ281945664





 QQ���Ѻ�Ⱥ
QQ���Ѻ�Ⱥ QQ���g
QQ���g �vӍ��
�vӍ�� �vӍ����
�vӍ���� �ղ�
�ղ� ����
���� �
� ��
��") ��(l��i)�� 2#
��(l��i)�� 2#

