�@��(g��)�(xi��ng)Ŀ����Ҫ�о��˻���STM32F103̎����������С܇����ϵ�y(t��ng)���O(sh��)Ӌ(j��)������(g��)ϵ�y(t��ng)��Ҫ����STM32F103��������늙C(j��)�(q��)��(d��ng)�·���t��z�y(c��)�·�����������·���҂�����STM32F103оƬ�������}�_�����{(di��o)����̖(h��o)��PWM������Ɍ�(du��)늙C(j��)�Ŀ��ƣ�ѭ�Eģ�K���üt��̽�y(c��)���M(j��n)�кڰ�̽�y(c��)������ģ�K�M(j��n)���ϵK��z�y(c��)����ܣ�����ģ�K�Á�z�y(c��)С܇�c�ϵK��֮�g�ľ��x����������·�������������ܵ���չ��С܇���\(y��n)���^���У����ϳ���(y��u)����ѭ�E����
1.��B
1.1�(xi��ng)Ŀ��B
1.2�о�Ŀ��
1.3�O(sh��)��
1.4�о�������˼·
1.5�ɹ�
2.ܛӲ���O(sh��)Ӌ(j��)
2.1����С܇��B
2.2����С܇�ĽM�ɲ���
2.2.1̎����
2.2.2�������z�y(c��)����
2.2.3�����z�y(c��)����
2.2.4�C(j��)���˵��_
2.3ѭ�Eԭ��
2.3.1�t��̽�y(c��)��
2.3.2ѭ�E����
2.3.3��·�F(xi��n)�����
2.3.4ѭ�E���a
2.4����ԭ��
2.4.1HC-SR04����ԭ��
2.4.2���ɱ��ϲ���
2.4.3���ɱ��ϴ��a
2.5�Ԅ�(d��ng)�{�ϵ�y(t��ng)���w�Y(ji��)��(g��u)
3.ܛӲ���{(di��o)ԇ
3.1ܛ���{(di��o)ԇ
3.2Ӳ���{(di��o)ԇ
4.�Y(ji��)Փ
1.��B1.1�(xi��ng)Ŀ��B���(xi��ng)Ŀ��һ��(g��)�Ԅ�(d��ng)�{�ϵ�y(t��ng)���(xi��ng)Ŀ��ԓ�(xi��ng)Ŀ�܉�ͨ�^�ṩ�Ԅ�(d��ng)�{��(du��)·�r����̎���Լ����������ϵ�y(t��ng)�O(sh��)Ӌ(j��)���¹��ܣ�����(j��)��(ch��ng)���O(sh��)������Ԅ�(d��ng)�{ԓ�Ԅ�(d��ng)�{���O(sh��)�������˽����܇�� ؛܇��Ҳ�����ǿ�܇�ȡ� 1.2�о�Ŀ���O(sh��)Ӌ(j��)һ��(g��)�Ԅ�(d��ng)�{�ϵ�y(t��ng)���������ض��ط�����܉�E��������܉�E���ߣ����ԙz�y(c��)���ϵK��ľ��x���M(j��n)�ж�ܡ� 1.3�O(sh��)�����O(sh��)��У���ṩ�ṩ�ĘәC(j��)���t��̽�y(c��)���������z�y(c��)ģ�K����������늳�������㣬Դ����˼·���a�����_����(ch��ng)��܉�E���@����r�£��҂���С܇����������ɫ܉�E�����m(x��)���ߣ������ϵK��r(sh��)С܇ֹͣ�����_�ϵK���С܇���^�m(x��)�����ض���܉�E���ߣ�ֱ���҂�Ҫ����Y(ji��)���� 1.4�о�������˼·���Ό�(sh��)�(y��n)�҂���ȡģ�M����ʹ��HL-1 ����С܇ģ�M�挍(sh��)����܇���M(j��n)�Ќ�(sh��)�(y��n)����(sh��)�(y��n)�^���У��҂�ģ�M��ͬ��·�r�����硰T��·������ʮ��·���������^·����·�r����С܇��������(y��ng)��λ�ã��^����t��̽�y(c��)��ָʾ���������r����ӛ����������䌦(du��)��(y��ng)��r�r(sh��)IO�ڵ�ݔ����r���ó�ѭ�E�δ��a�����ϕr(sh��)���҂�ͨ�^�O(sh��)���ϵK�����С܇�����ϵK��r(sh��)��(y��ng)�����Ļؑ�(y��ng)���õ�����(y��ng)�Ăδ��a����K�M(j��n)�����w���a�ķ�������
1.5�ɹ�ѭ�E��С܇���ض���(ch��ng)��ģʽ�£����պ�ɫ��܉�E�� ���ϣ�ѭ�Eģʽ�£�С܇���ϵK��ֹͣ������ģʽ�£�С܇���ϵK��ľ��x����20cm�r(sh��)ֱ�У�С܇���ϵK��ľ��x����10cmС��20cm�r(sh��)���D(zhu��n)��С܇���ϵK��ľ��xС��10cm�r(sh��)���ˣ� �ęn���ύ���g(sh��)��(b��o)�桢��(hu��)�h�o(j��)Ҫ���M(j��n)��Ӌ(j��)�������΄�(w��)���M���(xi��ng)Ŀ�M�ɆT�����ęn 2.ܛӲ���O(sh��)Ӌ(j��)2.1����С܇��B- ����С܇��݆ʽ�C(j��)���ˡ�
- ����һ��(g��)���h(hu��n)����֪��Ҏ(gu��)���Q�ߡ��Ԅ�(d��ng)�{�ȹ�����һ�w�ľC��ϵ�y(t��ng) ��
- ���Ǽ����\(y��n)����Ӌ(j��)��C(j��)�����С���Ϣ��ͨ�š���(d��o)�����˹����ܼ��Ԅ�(d��ng)���Ƶȼ��g(sh��)�ľC���w��
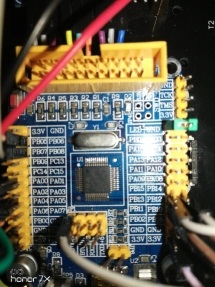
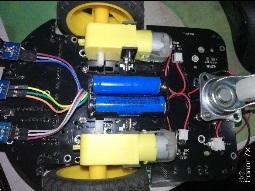
�D 1 ����С܇���w�D 2.2����С܇�ĽM�ɲ���2.2.1̎�����D 2 STM32F103C8��оƬ���w�D STM32F103C8��оƬ - ��(n��i)����ARM 32λ��Cortex-M3 CPU �����l��72MHz
- �惦(ch��)����64KB�W������惦(ch��)����20KB��SRAM
- �Դ늉���2.0V~3.6V
- ��(sh��)��(j��)�D(zhu��n)�Q����2��(g��)12λAD�D(zhu��n)�Q����10��(g��)ݔ��ͨ����
- �{(di��o)ԇģʽ�����Іξ��{(di��o)ԇ��SWD����JTAG�ӿ�
2.2.2�������z�y(c��)�����D 3 �t�ⷴ����������w�D �t�ⷴ������� - �z�y(c��)���x��1mm~8mm
- ���^��ݔ����(sh��)���_�P(gu��n)����0��1��
- ���Ȧ���{(di��o)�����λ���{(di��o)��(ji��)�`����
- ����늉���3.3V~5V
�������ļt��l(f��)����O�ܲ���l(f��)��t�⾀����(d��ng)�l(f��)����ļt�⾀�]�б����������폊(qi��ng)�Ȳ���r(sh��)�����^����ݔ���˞���ƽ��ָʾ��Ϩ�磻��(d��ng)�t�⾀��������ҏ�(qi��ng)������r(sh��)�����^����ݔ���˞���ƽ��ָʾ�����c(di��n)���� 2.2.3�����z�y(c��)�����D 4 HC-SR04���w�D HC-SR04���_ - VCC��5V�Դ
- GND��ؾ�
- TRIG�|�l(f��)������̖(h��o)ݔ��
- ECHO�����̖(h��o)ݔ��
�� 1 HC-SR04�������(sh��) | | | | | | | | | ݔ��TTL�ƽ��̖(h��o)��̖(h��o)���c��̳ɱ��� |
2.2.4�C(j��)���˵��_�D 5 LN98N����늙C(j��)�(q��)��(d��ng)���w�D ܇݆������(g��)��ǰ݆�ǃɂ�(g��)����(d��ng)݆����݆��һ��(g��)�Ą�(d��ng)݆ - �ɂ�(g��)ֱ��늙C(j��)
- L298N����늙C(j��)�(q��)��(d��ng)оƬ
- ����늉���5V
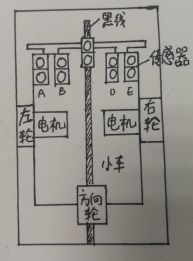
�������a(ch��n)��PWM��̖(h��o)�oL298N��ͨ�^�{(di��o)��(ji��)������ռ�ձȁ�����늙C(j��)���D(zhu��n)�١��ɂ�(g��)늙C(j��)�D(zhu��n)����ͬ�r(sh��)С܇ǰ�M(j��n)����ˣ��D(zhu��n)�ٲ�ͬ�r(sh��)С܇�D(zhu��n)�����ɂ�(g��)늙C(j��)��������\(y��n)�D(zhu��n)�r(sh��)��С܇ԭ���D(zhu��n)Ȧ�� 2.3ѭ�Eԭ��С܇ѭ�Eָ����С܇�ڰ�ɫ�ذ���ѭ�ھ����ߣ�ͨ����ȡ�ķ����Ǽt��̽�y(c��)���� 2.3.1�t��̽�y(c��)�����üt�⾀�ڲ�ͬ�ɫ�����w������в�ͬ�ķ��䏊(qi��ng)�ȵ����c(di��n)����С܇����^���в���������l(f��)��t��⣬��(d��ng)�t���������ɫ���|(zh��)�ذ�r(sh��)�l(f��)�������䣬����ⱻ�b��С܇�ϵĽ��չܽ��գ���������ھ��t�t��ⱻ���գ�С܇�ϵĽ��չܽ��ղ����t��⡣��Ƭ�C(j��)���Ƿ��յ�������ļt��������(j��)���_���ھ���λ�ú�С܇������·���� 2.3.2ѭ�E���������c·���ɫ���^���e�ľ��l����ɫ·�����Зl��ɫ������������(d��o)������(d��ng)ѭ�E�������յ��ھ��r(sh��)ݔ�����ƽ1���յ���ɫ�r(sh��)ݔ�����ƽ0�� �D 6 ѭ�Eʾ��D 2.3.3��·�F(xi��n)����� | | | | |
���Eֱ�У�������(d��ng)ǰ��ɫ·��ָʾֱ�� | | | ѭ�E���D(zhu��n)90�ȣ�������(d��ng)ǰ��ɫ·��ָʾֱ�� | | | ѭ�E���D(zhu��n)90�ȣ�������(d��ng)ǰ��ɫ·��ָʾֱ�� | | | ����T��·�ڣ�����(j��)�����D(zhu��n)�����������D(zhu��n)�������D(zhu��n)�����������D(zhu��n)������ѭ�E�D(zhu��n)���� |  ʮ��·�� ʮ��·��
| | ����ʮ��·�ڣ�����(j��)���������D(zhu��n)�����D(zhu��n)ֱ�� | | | �������^·�����D(zhu��n)180���{(di��o)�^ |
�D�� 1 ��·��B(t��i)ģ�M
�҂�������·ѭ�E����8�Р�B(t��i)ָʾ����(du��)��(y��ng)��r������ʾ �� 2 �t��z�y(c��)��B(t��i)����
��ע���҂�?c��)O(sh��)Ӌ(j��)�ľ�·֮�g��һ���ľ��x��LR��B(t��i)����(hu��)���F(xi��n)
2.3.4ѭ�E���a�D 7 ѭ�E���a�؈D 2.4����ԭ��2.4.1HC-SR04����ԭ��- �o����ģ�K�����Դ�͵ء�
- �o�}�_�|�l(f��)���_��trig��ݔ��һ��(g��)�L(zh��ng)��20us�ĸ��ƽ������
- ݔ�뷽����ģ�K��(hu��)�Ԅ�(d��ng)�l(f��)��8��(g��)40KHz�������c��ͬ�r(sh��)�ز����_��echo���˵��ƽ��(hu��)��0׃?y��u)?�����˕r(sh��)��(y��ng)ԓ����(d��ng)���r(sh��)��Ӌ(j��)�r(sh��)��
- ��(d��ng)�������ر�ģ�K���յ��r(sh��)���ز��� �_�˵��ƽ��(hu��)��1׃?y��u)?�����˕r(sh��)��(y��ng)ԓֹͣ���r(sh��)��Ӌ(j��)��(sh��)�������r(sh��)��ӛ�µ��@��(g��)�r(sh��)�g���鳬���ɰl(f��)�䵽���صĿ��r(sh��)�L(zh��ng)��
- ����(j��)���ڿ՚��е��ٶȞ�344��/�룬����Ӌ(j��)������y(c��)�ľ��x��
2.4.2���ɱ��ϲ���
�� 3���ɱ��ϲ��Է��� ��(d��ng)ǰ���x��curDis��/cm | | | | | | | |
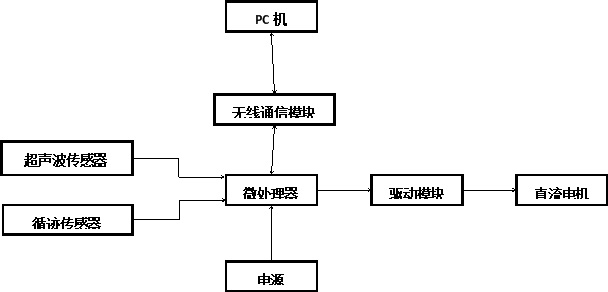
2.4.3���ɱ��ϴ��a�D 8 ���ɱ��ϳ���؈D 2.5�Ԅ�(d��ng)�{�ϵ�y(t��ng)���w�Y(ji��)��(g��u)
�D 8 �Ԅ�(d��ng)�{�ϵ�y(t��ng)���w�Y(ji��)��(g��u) 3.ܛӲ���{(di��o)ԇ3.1ܛ���{(di��o)ԇϵ�y(t��ng)�_�l(f��)�l����Keil 5.26.2.0 ���d���ߣ�J-Link 6.20 3.2Ӳ���{(di��o)ԇС܇�B���� ���Դ С܇J2 �CVCC ��stm32���ư�JP2- +5V С܇J2 �CGND��stm32���ư�JP2- GN С܇J2 �CVCC�Ӽt����ư�VCC С܇J2 �CGND�Ӽt����ư�GND ���(q��)��(d��ng) С܇J3-IN1��stm32���ư�JP3-PB10 С܇J3-IN2��stm32���ư�JP3-PB11 С܇J3-IN3��stm32���ư�JP3-PB12 С܇J3-IN4��stm32���ư�JP3-PB13 С܇J3-EN1��stm32���ư�JP3-3.3V С܇J3-EN2��stm32���ư�JP3-3.3V ���t����̖(h��o)ݔ�� �t����ư�D01��stm32���ư�J2-PB5 �t����ư�D02��stm32���ư�J2-PB6 �t����ư�D03��stm32���ư�J2-PB7 ������ݔ��ݔ�� ����ģ�K��С܇J6 С܇J4-P2.0��stm32���ư�PA0 С܇J4-P2.1��stm32���ư�PA4 4.�Y(ji��)Փ�����(xi��ng)Ŀ�O(sh��)Ӌ(j��)������̎��ģ�K��늙C(j��)�(q��)��(d��ng)ģ�K������ģ�K��ѭ�Eģ�K����������̎��ģ�K��оƬ��stm32f103��늙C(j��)�(q��)��(d��ng)ģ�K����ҪоƬ��LM293D������ģ�K����Ҫ������HC-SR04��ѭ�Eģ�K����Ҫ�������傀(g��)�t��̽�y(c��)����IR����ͨ�^��ģ�K֮�g������Լ�ܛ����Ӳ���O(sh��)Ӌ(j��)�ĽY(ji��)�ϣ�ʹ����K�O(sh��)Ӌ(j��)����С܇����ѭ�E���ܺͱ��Ϲ��ܣ�������܉�E�ھ�ǰ�M(j��n)������(hu��)ƫ��܉�E�����Ү�(d��ng)̽�y(c��)���ϵK��r(sh��)��ֹͣǰ�M(j��n)����̽�y(c��)���x����10cm����K�����ԓ�(xi��ng)Ŀ���O(sh��)���A(y��)�ڡ�
- #include <stdio.h>
-
- extern void CarInit(void);
- extern void DebugInit(void);
- extern void TimerInit(void);
- extern void CheckTimer(void);
-
- int main()
- {
- TimerInit(); // ϵ�y(t��ng)�΄�(w��)���r(sh��)����ʼ��
- CarInit(); // С܇��ģ�K��ʼ��
- DebugInit();
-
- while(1)
- {
- CheckTimer(); // �_ʼ��(zh��)�ж��r(sh��)�΄�(w��)
- }
- }
- timer.c
- #include "stm32f10x.h"
-
- void TimerInit()
- {
- RCC->APB2ENR |= 1 << 11;
-
- TIM1->PSC = 36000 - 1;
- TIM1->ARR = 65535;
- TIM1->CR1 = 0x81;
- }
-
- static unsigned short TimeGet()
- {
- return TIM1->CNT;
- }
-
-
- struct timer
- {
- void (*proc)(void);
- int reload;
- unsigned short begin;
- unsigned short duration;
- };
-
- #define TIMER_CNT_MAX 8
- static struct timer tmr[TIMER_CNT_MAX];
- static int tmr_cnt=0;
-
- int SetTimer(unsigned short duration, void (*proc)(void) , int reload)
- {
- if (tmr_cnt >= TIMER_CNT_MAX)
- {
- return 0;
- }
- tmr[tmr_cnt].begin = TimeGet();
- tmr[tmr_cnt].duration = duration;
- tmr[tmr_cnt].proc = proc;
- tmr[tmr_cnt].reload = reload;
- tmr_cnt++;
- return 1;
- }
-
- // CheckTimer��������ѭ�h(hu��n)�{(di��o)�ú���(sh��)����(zh��)�ж��r(sh��)��(w��)
- void CheckTimer()
- {
- int tmr_idx=0;
- int i=0;
- unsigned short now = TimeGet();
-
- while (tmr_idx < tmr_cnt)
- {
- if ((unsigned short)(now - tmr[tmr_idx].begin) >= tmr[tmr_idx].duration)
- {
- if (tmr[tmr_idx].proc)
- (*tmr[tmr_idx].proc)();
- if (tmr[tmr_idx].reload)
- {
- tmr[tmr_idx].begin = now;
- tmr_idx++;
- }
- else
- {
- for (i=tmr_idx; i<tmr_cnt-1; i++)
- tmr[i] = tmr[i+1];
- tmr_cnt--;
- }
- }
- else
- tmr_idx++;
- }
- }
-
- 3.motor.c
-
- #include "stm32f10x.h"
-
- struct motor
- {
- enum {STOP, FORWARD, BACKWARD} state;
- int forward_opcode;
- int backward_opcode;
- };
-
- static struct motor left_motor, right_motor;
-
- void MotorInit()
- {
- RCC->APB2ENR |= 1 << 3;
- GPIOB->CRH &= 0xff0000ff;
- GPIOB->CRH |= 0x00333300; //PB10 ����� , PB11 ��ǰ�M(j��n), PB12 ��ǰ�M(j��n), PB13 �Һ���
- GPIOB->BSRR = ((1 << 10) | (1 << 11) | (1 << 12) | (1 << 13)) << 16;
-
- left_motor.state = STOP;
- left_motor.forward_opcode = 1 << 11;
- left_motor.backward_opcode = 1 << 10;
-
- right_motor.state = STOP;
- right_motor.forward_opcode = 1 << 12;
- right_motor.backward_opcode = 1 << 13;
- }
-
- //��(du��)ij늙C(j��)ʩ��ǰ�D(zhu��n)�(q��)��(d��ng)�ƽ
- static void MotorRotateForward(struct motor *pmotor)
- {
- if (pmotor->state != FORWARD)
- {
- GPIOB->BSRR = (pmotor->backward_opcode << 16) | pmotor->forward_opcode;
- pmotor->state = FORWARD;
- }
- }
-
- //��(du��)ij늙C(j��)ʩ�Ӻ��D(zhu��n)�(q��)��(d��ng)�ƽ
- static void MotorRotateBackward(struct motor *pmotor)
- {
- if(pmotor->state != BACKWARD)
- {
- GPIOB->BSRR = (pmotor->forward_opcode << 16) | pmotor->backward_opcode;
- pmotor->state = BACKWARD;
- }
- }
-
- //��(du��)ij늙C(j��)ֹͣ�(q��)��(d��ng)�ƽ
- static void MotorStop(struct motor *pmotor)
- {
- if (pmotor->state != STOP)
- {
- GPIOB->BSRR = (pmotor->forward_opcode | pmotor->backward_opcode) << 16;
- pmotor->state = STOP;
- }
- }
-
- //늙C(j��)���ƺ���(sh��)
- //ݔ��?y��n)��?sh��)��늙C(j��)��(bi��o)�R(sh��)�ַ�'r'��l'���һ��� �������a�ַ�'f'��'b'��'s'�����D(zhu��n)�����D(zhu��n)���oֹ��
- void MotorControl(char motor, char op_cmd)
- {
- struct motor *pmotor;
-
- if (motor == 'r')
- pmotor = &right_motor;
- else if (motor == 'l')
- pmotor = &left_motor;
- else
- return;
- if (op_cmd == 'f')
- MotorRotateForward(pmotor);
- if (op_cmd == 'b')
- MotorRotateBackward(pmotor);
- if (op_cmd == 's')
- MotorStop(pmotor);
- }
- wheel.c
- #include "stm32f10x.h"
-
- extern void MotorInit(void);
- static void WheelDrive(void);
- extern void MotorControl(char motor, char op_cmd);
- extern int SetTimer(unsigned short duration, void (*proc)(void) , int reload);
-
- struct wheel
- {
- unsigned short period;
- unsigned short duty;
- unsigned short current;
- unsigned char motor;
- unsigned char dir;
- };
-
- static struct wheel wheel_left, wheel_right;
- static enum{STOP, FORWARD, BACKWARD, LEFT, RIGHT, U_TURN} state;
-
- // WheelInit�nj�(du��)С܇��܇݆Ҫ���ⲿ�ӿ��M(j��n)�г�ʼ����
- void WheelInit()
- {
- MotorInit();
-
- wheel_left.period = 50;
- wheel_left.duty = 15;
- wheel_left.current = wheel_left.period;
- wheel_left.dir = 's';
- wheel_left.motor = 'l';
-
- wheel_right.period = 50;
- wheel_right.duty = 15;
- wheel_right.current = wheel_right.period;
- wheel_right.dir = 's';
- wheel_right.motor = 'r';
-
- state = STOP;
-
- SetTimer(2, WheelDrive, 1); // ÿ1ms��(zh��)��һ��
- }
-
- static void WheelRun(struct wheel *pwheel, char dir)
- {
- if((dir != 'f') && (dir != 'b'))
- return;
- pwheel->dir = dir;
- pwheel->current++;
- if (pwheel->current >= pwheel->period)
- pwheel->current = 0;
- if (pwheel->current < pwheel->duty)
- MotorControl(pwheel->motor, pwheel->dir);
- if(pwheel->current >= pwheel->duty)
- MotorControl(pwheel->motor, 's');
- }
-
- static void WheelStop (struct wheel *pwheel)
- {
- if(pwheel->dir == 's')
- return;
- pwheel->dir = 's';
- pwheel->current = pwheel->period;
- MotorControl(pwheel->motor, 's');
- }
-
- // WheelDrive�Ǹ���(j��)������B(t��i)���O(sh��)��С܇��ǰ�M(j��n)�����ˡ����D(zhu��n)�����D(zhu��n)��ֹͣ��
- // ��Ҫ�Dzٿ�WheelRun��WheelStop�ɂ�(g��)����(sh��)��(sh��)�F(xi��n)����Ҫ�Ĺ��ܡ�
- static void WheelDrive()
- {
- switch(state)
- {
- case FORWARD:
- WheelRun(&wheel_right, 'f');
- WheelRun(&wheel_left, 'f');
- break;
-
- case BACKWARD:
- WheelRun(&wheel_right, 'b');
- WheelRun(&wheel_left, 'b');
- break;
-
- case LEFT:
- WheelRun(&wheel_right, 'f');
- WheelStop(&wheel_left);
- break;
-
- case RIGHT:
- WheelStop(&wheel_right);
- WheelRun(&wheel_left, 'f');
- break;
-
- case STOP:
- WheelStop(&wheel_right);
- WheelStop(&wheel_left);
- break;
-
- case U_TURN:
- WheelRun(&wheel_right, 'b');
- WheelRun(&wheel_left, 'f');
- break;
- }
- }
- // WheelControl�ⲿ�������ʽ��׃܇�Ĺ�����B(t��i)
- void WheelControl(char cmd)
- {
- switch(cmd)
- {
- case 'f':
- state = FORWARD;
- break;
-
- case 'b':
- state = BACKWARD;
- break;
-
- case 'l':
- state = LEFT;
- break;
-
- case 'r':
- state = RIGHT;
- break;
-
- case 's':
- state = STOP;
- break;
-
- case 'u':
- state = U_TURN;
- break;
- }
- }
-
- void SpeedChange(unsigned char mode)
- {
- if (mode)
- {
- wheel_left.duty = 35;
- wheel_right.duty = 35;
- }
- else
- {
- wheel_left.duty = 15;
- wheel_right.duty = 15;
- }
- }
- detection.c
-
- #include "stm32f10x.h"
- #include <stdio.h>
-
- static void UpdateDistance(void);
- extern void SpeedChange(unsigned char mode);
- extern int SetTimer(unsigned short duration, void (*proc)(void) ,int reload);
-
- static unsigned char TIM2CaptureFlag; // ݔ�벶�@��B(t��i)
- unsigned int curDis = 0xffff; // ��(d��ng)ǰ���x
- unsigned char SYSTEM_MODE = 0; // ģʽ�x�� 0--ѭ�E���ϣ�1--���ɱ���
- char InfraredState;
-
- void DetectionInit()
- {
- GPIO_InitTypeDef GPIO_InitStructure;
- NVIC_InitTypeDef NVIC_InitStructure;
- TIM_ICInitTypeDef TIM_ICInitStruct;
- TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
-
- RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA | RCC_APB2Periph_GPIOB | RCC_APB2Periph_GPIOC, ENABLE);
- RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE);
-
- // HC-SR04 Echo PA0 (TIM2_CH1��IC1)
- GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPD;
- GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0;
- GPIO_Init(GPIOA, &GPIO_InitStructure);
- GPIO_ResetBits(GPIOA, GPIO_Pin_0);
-
- // HC-SR04 Trig PA4
- GPIO_InitStructure.GPIO_Pin = GPIO_Pin_4;
- GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
- GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
- GPIO_Init(GPIOA, &GPIO_InitStructure);
- GPIO_ResetBits(GPIOA, GPIO_Pin_4);
-
- // LED
- GPIO_InitStructure.GPIO_Pin = GPIO_Pin_13;
- GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
- GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
- GPIO_Init(GPIOC, &GPIO_InitStructure);
- GPIO_ResetBits(GPIOC, GPIO_Pin_13);
-
- // ��t�� PB5���мt�� PB6���Ҽt�� PB7
- GPIO_InitStructure.GPIO_Pin = GPIO_Pin_5 | GPIO_Pin_6 | GPIO_Pin_7;
- GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;
- GPIO_Init(GPIOB, &GPIO_InitStructure);
-
- // �����x�� PB8
- GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPD;
- GPIO_InitStructure.GPIO_Pin = GPIO_Pin_8;
- GPIO_Init(GPIOB, &GPIO_InitStructure);
- GPIO_ResetBits(GPIOB, GPIO_Pin_8);
-
- // TIM2
- TIM_TimeBaseStructure.TIM_Period = 0xffff; // ���dӋ(j��)��(sh��)ֵ���
- TIM_TimeBaseStructure.TIM_Prescaler = 72 - 1; // Ӌ(j��)��(sh��)����1us
- TIM_TimeBaseStructure.TIM_ClockDivision = TIM_CKD_DIV1; // �����l
- TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; // ����Ӌ(j��)��(sh��)
- TIM_TimeBaseInit(TIM2, &TIM_TimeBaseStructure);
-
- //TIM2_CH1ݔ�벶�@��ʼ��
- TIM_ICInitStruct.TIM_Channel = TIM_Channel_1; // ʹ��ͨ��1
- TIM_ICInitStruct.TIM_ICFilter = 0x02; // ���V��
- TIM_ICInitStruct.TIM_ICPrescaler = TIM_ICPSC_DIV1; // �����l
- TIM_ICInitStruct.TIM_ICSelection = TIM_ICSelection_DirectTI;// ֱ��ӳ�䵽IC1
- TIM_ICInit(TIM2, &TIM_ICInitStruct);
-
- // TIM2 NVIC����
- NVIC_InitStructure.NVIC_IRQChannel = TIM2_IRQn;
- NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0;
- NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0;
- NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
- NVIC_Init(&NVIC_InitStructure);
-
- TIM_ITConfig(TIM2, TIM_IT_CC1, ENABLE);
- TIM_Cmd(TIM2, ENABLE);
-
- // 100ms����һ�ξ��x
- SetTimer(200, UpdateDistance, 1);
- }
-
- char DetectionGet()
- {
- InfraredState = (GPIOB->IDR >> 5) & 0x7; // ����λ�քe��PB5��PB6��PB7��ֵ
- return InfraredState;
- }
-
- void TIM2_IRQHandler(void)
- {
- if((TIM2CaptureFlag & 0x10) == 0) // �Ƿ����µ�һ�β��@
- {
- TIM2CaptureFlag |= 0x10; // ���@��һ��������
- TIM_SetCounter(TIM2, 0);
- TIM_OC1PolarityConfig(TIM2, TIM_ICPolarity_Falling); // �O(sh��)�Þ��½��ز��@
- }
- else
- curDis = 0.017 * TIM_GetCapture1(TIM2);
- TIM_ClearITPendingBit(TIM2, TIM_IT_CC1); // ����Д���(bi��o)־λ
- }
-
- static void Delay20Us()
- {
- int i = 0;
- for (; i <= 231; i++);
- }
-
- static void UpdateDistance()
- {
- TIM2CaptureFlag = 0;
- TIM_OC1PolarityConfig(TIM2, TIM_ICPolarity_Rising);
-
- // Trig
- GPIO_SetBits(GPIOA, GPIO_Pin_4);
- Delay20Us();
- GPIO_ResetBits(GPIOA, GPIO_Pin_4);
-
- // ϵ�y(t��ng)ģʽ�x��
- if (GPIOB->IDR & 0x100)
- SYSTEM_MODE = 1;
- else
- SYSTEM_MODE = 0;
- SpeedChange(SYSTEM_MODE);
- }
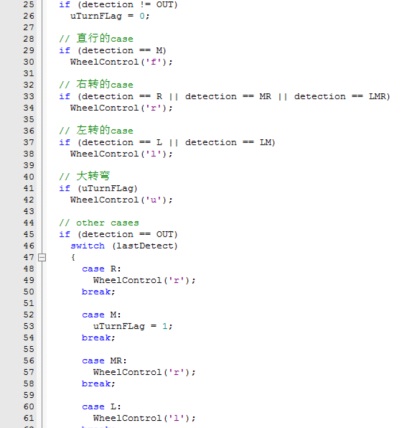
- track.c
- #include "stm32f10x.h"
- #include <stdio.h>
-
- extern void WheelControl(char cmd);
-
- enum {OUT, R, M, MR, L, LR, LM, LMR};
- extern unsigned int curDis; // ��(d��ng)ǰ�y(c��)��Y(ji��)��
- static char lastDetect = M; // ��һ�εļt��̽�y(c��)�Y(ji��)��
- static char uTurnFLag = 0; // ���D(zhu��n)����(bi��o)ӛ
-
- void TrackRun(char detection)
- {
- if (curDis <= 15)
- GPIO_SetBits(GPIOC, GPIO_Pin_13);
- else
- GPIO_ResetBits(GPIOC, GPIO_Pin_13);
-
- // ��(d��ng)ǰ���xС��15cm��ͣ܇
- if (curDis <= 15)
- {
- WheelControl('s');
- return;
- }
-
- if (detection != OUT)
- uTurnFLag = 0;
-
- // ֱ�е�case
- if (detection == M)
- WheelControl('f');
-
- // ���D(zhu��n)��case
- if (detection == R || detection == MR || detection == LMR)
- WheelControl('r');
-
- // ���D(zhu��n)��case
- if (detection == L)
- WheelControl('l');
-
- // ���D(zhu��n)��
- if (uTurnFLag)
- WheelControl('u');
-
- // other cases
- if (detection == OUT)
- switch (lastDetect)
- {
- case R:
- WheelControl('r');
- break;
-
- case M:
- uTurnFLag = 1;
- break;
-
- case MR:
- WheelControl('r');
- break;
-
- case L:
- WheelControl('l');
- break;
-
- case LM:
- WheelControl('l');
- break;
- }
-
- if (detection != OUT)
- lastDetect = detection;
- }
- avoid.c
- #include "stm32f10x.h"
-
- extern void WheelControl(char cmd);
-
- extern unsigned int curDis;
-
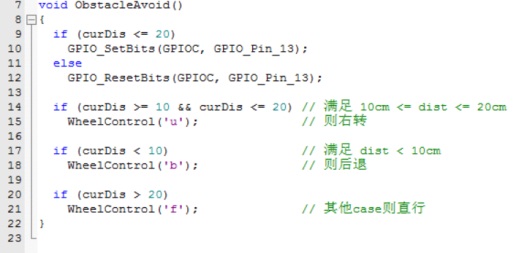
- void ObstacleAvoid()
- {
- if (curDis <= 20)
- GPIO_SetBits(GPIOC, GPIO_Pin_13);
- else
- GPIO_ResetBits(GPIOC, GPIO_Pin_13);
-
- if (curDis >= 10 && curDis <= 20) // �M�� 10cm <= dist <= 20cm
- WheelControl('u'); // �t���D(zhu��n)
-
- if (curDis < 10) // �M�� dist < 10cm
- WheelControl('b'); // �t����
-
- if (curDis > 20)
- WheelControl('f'); // ����case�tֱ��
- }
- car.c
- #include "stm32f10x.h"
- #include <stdio.h>
-
- static void CarRun (void);
- extern void WheelInit(void);
- extern char DetectionGet(void);
- extern void DetectionInit(void);
- extern void ObstacleAvoid(void);
- extern void TrackRun(char detection);
- extern int SetTimer(unsigned short duration, void (*proc)(void) , int reload);
-
- extern unsigned char SYSTEM_MODE;
-
- void CarInit()
- {
- WheelInit(); // ܇݆��ʼ��
- DetectionInit(); // ��������ʼ�����t��ͳ�����
- SetTimer(2, CarRun, 1); // ÿ1ms��(zh��)��һ��CarRun
- }
-
- static void CarRun()
- {
- char det = DetectionGet();
- if (SYSTEM_MODE)
- ObstacleAvoid();
- else
- TrackRun(det);
- }
�װ�W(w��ng)��ُ(g��u)�ã����g(sh��)�ęn��Դ�a�ڸ�����
ȫ���Y��51hei���d��ַ��
 Smart_Car_Lib_Ver.7z
(191.29 KB, ���d��(sh��): 203)
Smart_Car_Lib_Ver.7z
(191.29 KB, ���d��(sh��): 203)
2019-3-23 01:49 �ς�
�c(di��n)���ļ������d����
 ���g(sh��)��(b��o)��.docx
(1.09 MB, ���d��(sh��): 123)
���g(sh��)��(b��o)��.docx
(1.09 MB, ���d��(sh��): 123)
2019-3-21 17:05 �ς�
�c(di��n)���ļ������d����
 С܇�B��new.pdf
(855.94 KB, ���d��(sh��): 147)
С܇�B��new.pdf
(855.94 KB, ���d��(sh��): 147)
2019-3-21 17:05 �ς�
�c(di��n)���ļ������d����
|

 [��(f��)��朽�]
[��(f��)��朽�]

 ����TQQ:125739409;���g(sh��)����QQȺ281945664
����TQQ:125739409;���g(sh��)����QQȺ281945664