本設計針對無碳小車賽道障礙的隨機性,只依靠單純的機械結構很難實現障礙的躲避,因此在針對這種賽道障礙,在機械結構的基礎上增加了用電控的方法,讓小車自動循跡,實現對隨機障礙的躲避,本設計主要側重于電路部分的設計,利用超聲波模塊進行小車循跡,利用電機控制無碳小車的轉向,在單片機控制下的避障算法。
首先,本文將對無碳小車機械結構各個部分的原理及特點,對小車機構整體設計的布局進行闡述
其次,介紹電控部分的整體設計,所需電路模塊的原理設計,單片機,超聲波傳感器及電機的原理和特點及其選用。
再次,對無碳小車在賽道中如何采集信息,如何成功實現躲避障礙的算法進行詳細的介紹。
最后,對機電組合的協調工作,所出現的問題和如何調試進行說明。
目 錄
1.緒論 1
1.1課題背景及目的 1
1.2國內外研究狀況 1
1.3課題研究方法 2
1.4構成及研究內容 2
2 無碳小車的機械部分設計 3
2.1 小車設計的特點和原理 3
2.2 小車各部分設計的特點 3
2.2.1 車架的設計 3
2.2.2 動力裝置的設計 4
2.2.3 傳動裝置的設計 4
2.2.4 行走裝置的設計 5
2.2.5 轉向裝置的設計 5
2.2.6 結構參數的設計 5
3 電控系統的設計 7
3.1電控系統的整體設計 7
3.2電控各模塊的設計 8
3.2.1 電源穩壓模塊的設計 8
3.2.1 單片機控制設計 9
3.2.3 溫度檢測電路的設計 12
3.2.4 轉向裝置的設計 13
3.2.5避障方式的設計 16
3.2.6 避障算法的設計 18
3.2.7信號指示電路的設計 19
3.2.8 程序下載模塊設計 20
3.3 軟件的設計 20
3.4 機電系統的安裝與調試 22
1.1課題背景及目的 隨著工業的發展,全球經濟迅速增長。任何事物都有兩面性,可是隨著經濟全球化的到來,在經濟發展迅速的同時,全球的環境也漸漸的惡劣起來,人們也意識到環境存在的嚴重問題。人類的發展不得不放慢腳步,考慮環境問題帶來的影響。“無碳”一詞也就慢慢被人熟知,無碳紙,無碳車,無碳產品等, “無碳小車”正是體現了這種無碳理念。從字面上來看,小車將勢能轉成動能,并能實現指定運行軌跡的小車[1]。從真正意義上實現了,無碳,綠色,環保.生活中像這種具備一定特定功能的無碳結構到處可見,例如玩具小車。現如今,人們對于無碳概念的理解,研究與開發對于世界發展有著重要的意義和發展前景。 1.2國內外研究狀況 在大約20世紀70年代,中國研究的智能車開始發展起來,這么多年過去了,越來越體系化,越來越成熟,但在智能避障信息采集方式上和避障算法上仍有很大的改善。依據汽車轉向機構的原理,在小車轉彎時,為了能使小車不單單可以快速響應,也要避免速度過快偏離跑道[2]。將電機的位置提高,增大了扭矩,作為小車的視覺系統,賽道信息采集裝置,在對白線識別成功后,同時視覺系統又會發出電平信號傳達到控制中心,發出指令給驅動部分,來控制小車轉向,完成循跡 [3]。楊紅將萬向輪做從動輪,控制電機的運動,實現多方向動作。根據電磁感應的原理,陳文山則使用了LC諧振回路的方案,感應電磁信號尋跡 [4]。 目前,世界上許多國家都在積極進行智能小車的研究和設計開發,已應用于多個領域,尤其在軍事,探測領域的應用特別突出。在多傳感器融合的技術領域[5],來追尋汽車的運行軌跡,通過使用計算機編程技術,就能夠對汽車行駛的狀態進行自動控制,比如驅動和制動,速度的大小與方向。在大約二十世紀八十年代,由于計算機技術,半導體,通信技術的 飛躍發展,國外開始熱衷于機器人的研究,有很多研究具有很多軍事價值與應用前景。在1997年,索杰納在智能車上安裝了5臺激光測距儀[6],智能小車會自動躲避障礙。
1.3課題研究方法 由于人們對無碳環保的提倡和近年來對智能機器人的研究熱潮,特結合兩者而提出的研究課題.此課題的研究綜合性較強,充分的整合了所學過的機電知識。 此課題的研究策略及方法原則是已一根主線為線索,呈四周發射性擴散。研究的主線則是無碳小車依靠 焦耳的重力勢能在障礙間隔隨機的賽道上自動循跡避障。首先通過對課題的要求深入了解,通過文獻檢索法針對性的查閱關于自動循跡小車的資料,了解自動循跡無碳小車的發展,應用,以及研究成果.在實踐來源上,再通過對以往競賽作品的觀察研究設計出無碳小車的大致結構,然后利用資源整合法整合自己學過的機械原理,機械設計,電路,自動化控制等相關理論知識,計算小車各部件參數,整體布局以及電子元器件和傳感器的工作原理的了解和選用。用設計好的結構參數通過三維軟件將其建模裝配,畫出電路圖,最后將零件加工組裝,進行機電組合的測試及調試。 焦耳的重力勢能在障礙間隔隨機的賽道上自動循跡避障。首先通過對課題的要求深入了解,通過文獻檢索法針對性的查閱關于自動循跡小車的資料,了解自動循跡無碳小車的發展,應用,以及研究成果.在實踐來源上,再通過對以往競賽作品的觀察研究設計出無碳小車的大致結構,然后利用資源整合法整合自己學過的機械原理,機械設計,電路,自動化控制等相關理論知識,計算小車各部件參數,整體布局以及電子元器件和傳感器的工作原理的了解和選用。用設計好的結構參數通過三維軟件將其建模裝配,畫出電路圖,最后將零件加工組裝,進行機電組合的測試及調試。 1.4構成及研究內容 本文主要有緒論部分,無碳小車各個部分的結構特點,電控部分的設計,機電組合調試四大部分組成。 作為整篇的開端緒論部分,對無碳小車課題展開討論研究的背景與意義,中國的發展和國外的發展歷史與狀況;將機械部分安排到的第二章節,由于本注重于對電控部分的設計,因此機械部分做簡單介紹,機械部分主要介紹了組成小車的幾大部分,各個部分的特點,整體布局,主要結構的參數設計;第三章作為電控部分,包括了硬件和軟件的設計,硬件部分主要介紹了電控部分控制小車轉向的原理,電路硬件的設計,對所需要控制電路模塊的原理及模塊選用,包括單片機控制單元的介紹,超聲波測距傳感器的原理的了解和選用,溫度補償模塊的原理和選用和電機的原理和選用,小車避障的原理與算法設計;軟件介紹了電控小車避障思想和步驟;最后是機電組合調試。
本次題目是“無碳小車”,即小車前進的動力直接由重物下落過程中減少的重力勢能提供,只通過重力勢能與機械能的轉換,使得小車實現前進,轉向和調節。重力勢能提供的4焦耳能量作為小車前進的動力,按照特定的軌跡繞過設定的障礙.因此首先要考慮小車有足夠的行走距離完成避障。在設計過程中本著小車的能量高轉化看率,行走平穩性,均勻性,避障精確性,可調性的原則,車身結構應簡單,輕巧,在材料上應選擇較輕的材料,同時又要保證小車整體的可靠性。通過對小車功能的分析,小車需要完成重力勢能的轉換,驅動自身行走,自動避開障礙物。為了方便設計這里根據小車所要完成的功能將小車劃分為六個部分進行模塊化設計,分別是車身,能源動力驅動部分,傳動部分,轉向部分,車輪部分,微調部分。一個相對完整的小車應該包括了上面的的結構,最主要部件是傳動和轉向 [7]。 繩子的一邊繞過小車固定定滑輪系在砝碼上,驅動軸也用繩子纏住,當砝碼從高處自由落下時,會帶動驅動軸旋轉,將速度通過一對齒輪傳動機構傳遞給車輪軸,車輪軸帶動后車輪驅動小車,在遇到障礙物時,系統會通過電路模塊的檢測,計算,控制前車輪轉向,完成避障.在小車車速過快時,如果通過制動裝置使小車減速,小車在減速制動的時候,會因為摩擦浪費掉一些能量,繞過的障礙多,通過對機械結構的優化設計來彌補制動裝置損耗的能量。 2.2 小車各部分設計的特點 2.2.1 車架的設計 車架不用承受很大的力,精度要求低。考慮到重量加工成本等,車架采用鋁材加工制作成三角底板式。小車的重心應較低,重心平穩,所以小車車架重量不能過輕,以保證車架來支撐整個車的重量,在行走過程中不翻車,避免車體過重帶來的能量浪費,又能避免車體過輕使小車側翻。車架如圖:
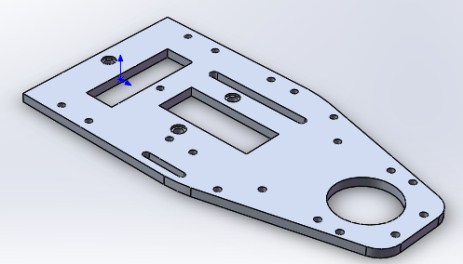
圖2.1 無碳小車車駕 2.2.2 動力裝置的設計 由于小車驅動能源有限,又要保證能夠行走一定的距離,所以重力勢能轉化到驅動軸上的效率應控制在最大。組成動力部分的有繩線,三根支撐立柱,定滑輪,1千克質量的重物,大齒輪驅動軸。能量有效控制方面采用了三根立柱來限制重物落下過程中的擺動,這樣設計的好處在于重物擺動過程中不必要的能量損耗,合理的控制重物下落時擺動的幅度,小車也能盡可能的勻速行駛,防止了一根立柱帶來的翻車,跑偏問題。 動力裝置部分的設計應該結構簡單。應保障足夠的小車驅動力,將線繞在驅動軸上,直徑設計盡可能小,小車啟動加速度不能太大,行走過程中應平穩,勻速,因此將驅動軸設計成帶有錐度,在大軸頸上以保證啟動力矩,小軸頸確保小車行駛勻速。 2.2.3 傳動裝置的設計 小車的動力能源由于來自只有一個4焦耳的重力勢能,這些能量用于轉向與行走,行走裝置和轉向裝置需要相互調和,達到最好的工作狀態,因此運動的協調性就需要通過傳動系統來保證[8]。要使小車行駛的更遠及按設計的軌道精確地行使,傳動機構必須傳動效率高,傳動穩定,結構簡單重量輕,本設計采用齒輪一級傳動,高精度,運動起來起伏不大,具有承載大載荷的優勢,由于傳動比值是固定的數值,因此在以后的調試過程中不方便,小車整體寬度會增大,小車在避障轉動方向的時候,轉動曲率會加大,
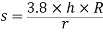
但是其重心又有所降低,行駛會平穩一些。 2.2.4 行走裝置的設計 車輪與賽道接觸的距離,如何減小小車與地面的摩擦是減少能源浪費的關鍵,選取摩擦系數較小的鋁材,減小與地面的阻力,由于鋁材較輕,車輪的直徑過小會在小車啟動時產生大的加速度,在理論上,驅動軸轉過一圈,車輪直徑越大,小車走的越遠,但過大與地面有較大的阻力,能量消耗增加.在啟動時,盡量使小車車輪同步驅動,防止啟動跑偏,在轉彎時,外圈和內圈車輪的速度不一樣,因此需要將車輪設計成差速結構,車輪軸上安裝兩個單向軸承,單向軸承正轉時自由,反轉鎖緊。單向軸承原理簡單,速度較慢的輪子為主動輪,速度快的為從動輪[9],主動輪和從動輪互相交替進行,這樣既可以保證啟動時雙輪同步轉動,轉彎時也不易打滑。 2.2.5 轉向裝置的設計 轉向裝置的設計是決定著小車能否順利完成避障的關鍵,對于前車輪的穩定平穩需要合理的設計,同樣為了減少與賽道的摩擦力,設計前車輪的寬度較小,車輪由前車軸和軸承連接,減小行走阻力,車軸由前輪車架支撐,在前輪車架軸上安裝兩個滾動軸承,兩端固定,防止前輪晃動,提高了轉彎精度。 2.2.6 結構參數的設計 本設計初步選定傳動比為3.8,選用小模數0.5,為的齒輪,材質為鋁合金進行線切割加工.小齒輪齒數選定為36,為了齒輪嚙合中防止多對齒同時嚙合,大齒輪和小齒輪不能同時為偶數,則大齒輪為137,小齒輪寬度稍大于大齒輪,防止齒輪嚙合中滑動。 當驅動軸繞過一圈時,在傳動比的帶動下,車輪軸就會轉 圈,則車輪行駛的距離見式 圈,則車輪行駛的距離見式  (2.1) (2.1)
 為驅動軸轉過一圈小車行走的距離,R為大車輪直徑。當重物下降高度為 為驅動軸轉過一圈小車行走的距離,R為大車輪直徑。當重物下降高度為 時,則小車行駛的距離見式 時,則小車行駛的距離見式
 (2.2) (2.2)
 為小車行走距離, 為小車行走距離, 為驅動軸小徑.由公式可知,在下降高度一定的情況下,大車輪與驅動軸小徑比越大,小車行走的越遠,因此在保證有足夠的驅動力矩情況下,盡可能將兩者之比設計的大。傳動齒輪如圖: 為驅動軸小徑.由公式可知,在下降高度一定的情況下,大車輪與驅動軸小徑比越大,小車行走的越遠,因此在保證有足夠的驅動力矩情況下,盡可能將兩者之比設計的大。傳動齒輪如圖:
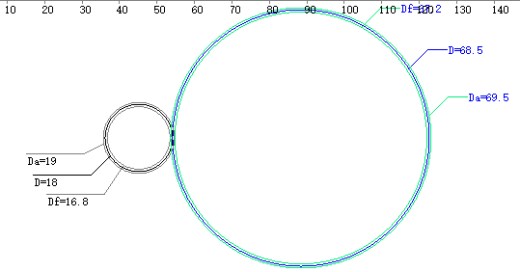
圖2.2 一級減速齒輪
3 電控系統的設計 3.1電控系統的整體設計 小車的轉向問題由電控系統解決,由于轉向裝置不在完全依賴于機械結構設計 [10],所以設計小車避障的時候,難度降低了很多。 電控系統的設計實現了在不同間距的障礙內,可以自動避障的功能,優化了以往傳統的機械小車在可變間距難以自動避障的問題。 電控部分控制的原理是由單片機控制,通過超聲波模塊檢測道路上的狀況,單片機負責接收信息和處理,由編定好的程序由單片機計算,控制電機的轉角,控制前輪進行轉彎。為了簡化電路硬件的設計,智能小車系統采用模塊化設計 [11]。智能小車的傳感器一般采用紅外對管,金屬開關,超聲波測距,加速度傳感器,指南針傳感器,舵機,直流電機,L298N控制器等。初步設計的電控部分,應該由單片機控制部分,超聲波,測量溫度模塊,電機轉向部分,小車避障算法設計部分。電控系統設計的準確性決定著小車能否順利通過障礙,無碳小車電控躲避障礙的算法是難點,根據小車賽道的情況,賽道可分為直線賽道和彎道賽道,在小車從直道進入彎道時如何進行有效的避障,如何設計避障算法和提高小車避障精度是電控系統設計中的難點。電控系統的整體結構如圖:
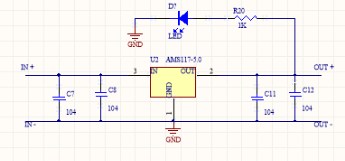
3.2電控各模塊的設計 3.2.1 電源穩壓模塊的設計 電源電路是保證整個電路系統能夠正常工作的前提,電路系統的整個核心是單片機,單片機的工作電壓為 ,所以要使電路能夠正常的工作,則要保證輸入到整個電控系統的電壓在,同時為了在小車行駛過程中能夠方便的提供電源,采用移動電源為電路供電,本設計得電源電路采用一節南孚 ,所以要使電路能夠正常的工作,則要保證輸入到整個電控系統的電壓在,同時為了在小車行駛過程中能夠方便的提供電源,采用移動電源為電路供電,本設計得電源電路采用一節南孚 電池供電,將其安裝在一個電池盒內,該電池盒自帶電源開關,為了能夠得到的工作電壓,需要對高壓進行降壓穩定輸出,所以需要一個電源降壓穩壓模塊,電源穩壓模塊如圖: 電池供電,將其安裝在一個電池盒內,該電池盒自帶電源開關,為了能夠得到的工作電壓,需要對高壓進行降壓穩定輸出,所以需要一個電源降壓穩壓模塊,電源穩壓模塊如圖: 圖3.1 電源電路
圖3.2 AMS117-5.0降壓模塊 降壓模塊選用的是AMS117-5.0降壓模塊,當電流太高的時候,此模塊就會起到限流的作用,溫度升高的時候,也會保護,具有電池反接和反插入保護電路 [12]。該模塊可以進行DC6.5-12V電壓的輸入,輸出電壓穩定在5v,輸出最大電流為800ma,輸入輸出一共采用4個排針引腳,帶電源指示燈,能夠更好的判斷模塊是否工作。
3.2.1 單片機控制設計 整個電控系統的核心就像人類的大腦,操縱者整個系統,它應該具備處理系統數據,接受和發送指令控制各個模塊的功能。在近幾年,電子技術與集成電路的飛躍發展前進,將傳統的復雜的電路集成到一塊芯片上,并向著微型化,多功能化,快速化,精簡化的方向發展。作為電路集成化的典型控制芯片單片機,是一個微控制器,單片機具備了數據處理,定時器,計數器,數模電路轉換,控制功能,單片機能夠將接收到的數據進行快速的處理運算,并根據相應的程序發送指令去控制相應的模塊。單片機占用的空間小,信息存儲量大,計算運行速度高,低功耗,適應能力強,反應靈敏,易掌握實現模塊化設計。 在此課題電路設計中,硬件控制中心使用了單片機型號為AT89S52,一種低功耗、高性能CMOS8位微控制器,具有8K字節系統可編程Flash存儲器。8k字節Flash,512字節RAM, 32 位I/O 口線,看門狗定時器,內置4KB EEPROM,MAX810復位電路,3個16 位定時器/計數器,4個外部中斷,一個7向量4級中斷結構(兼容傳統51的5向量2級中斷結構),全雙工串行口。單片機具有功耗低,易學易掌握的特點,單片機的工作電壓為5V,本設計用一節9V電池經降壓模塊穩定輸出5V供電,單片機最小系統是單片機能夠工作的前提,復位電路的作用是當單片機程序發生錯亂時,按下復位電路的復位按鈕,即可讓單片機重新工作.時鐘電路為單片機提供一定的節奏,是單片機有條不紊的工作,該系統采用單片機最小系統帶鎖DC05模塊,該模塊除了時鐘電路和復位電路之外,還增加了ISP程序下載口,P0完成上拉電阻,具有兩種電源供電方式,一種是DC-005的電源插座,二是三組排針電源端和接地端,可以輸入和輸出電壓,晶振為11.0592MHz,帶有自鎖開關,隨意改變電源的通斷電狀態,單片機的最小系統如下:
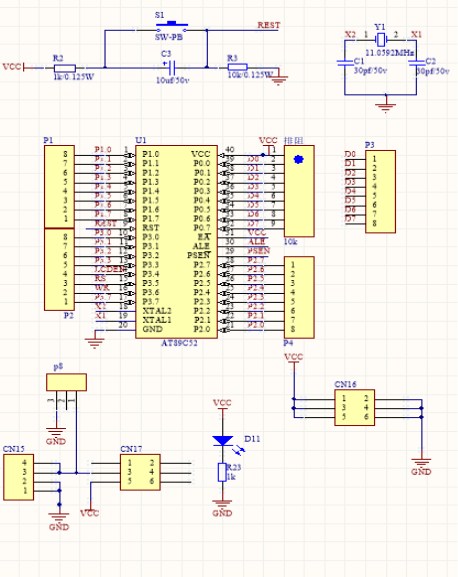
圖3.3 AT89S52單片機最小系統模塊 3.2.2測距循跡模塊的設計 測距模塊的選用決定著單片機是否能接收到準確的賽道信息,是否能按照設計的程序成功避障.測距尋跡模塊的選用的要求應該具有對賽道信息準確反映的高精度,發射和接收聲波信號的靈敏性,識別障礙物的范圍廣。傳感器測距是小車識別障礙信息來躲避障礙的根據,在眾多的測距一起里,一般有超聲波和紅外傳感器 [13]。超聲波傳感器是將超聲波信號轉換成其他能量信號,通常是電信號的傳感器。超聲波是振動頻率高于20KHz的機械波。它具有頻率高、波長短、繞射現象小,特別是方向性好、能夠成為射線而定向傳播等特點。 運用時間計時的方法測量距離,工作原理是給予超聲波一個大于10us的上升沿電平信號,這個上升沿由控制單元單片機發出,當超聲波模塊接收到這個信號的時候,超 聲波模塊就會有頻率為40kHz的聲波發出,定時器在這個時候就尅是計時,當聲波遇到障礙物時被反射回來[14],系統就會停止計時器的工作,所以測量出來的距離為聲速與定時器計時時間的二分之一的乘積,即見式(3.1)  (3.1) (3.1)
V代表在空氣介質中,超聲波傳播的速度快慢。是定時器從開始計時到停止計時的時間。無碳小車測距裝置設計了安裝了三個HC-SR04超聲波,分別安裝在小車的車頭,左邊和右邊,互相呈45度角.可以在0.02-4m的范圍內進行測量,測量誤差達到3mm,由單片機的引腳觸發,當單片機發送10us的上升沿給超聲波,超聲波就會發出40KHz方波,可以連續發射,在經過障礙物的反射后,當有信號返回到超聲波的接收端時,超聲波會自動檢測。下圖是超聲波的時序發生過程: 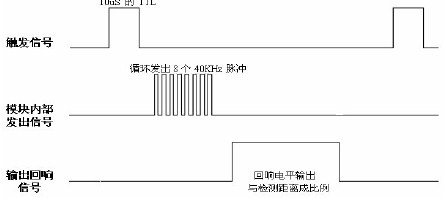
圖3.4 HC-SR04超聲波信號發生圖 工作電壓為4.5-5.5v,能將電能和超聲波相互轉化 [15]。能夠發生相互轉化的裝置被稱為是換能器。本方案中使用的型號為HC-SR04超聲波測距傳感器模塊,方法簡單,模塊性能穩定,距離測量精確 [16]。下圖為超聲波傳感器模塊系統內部的工作原理圖。 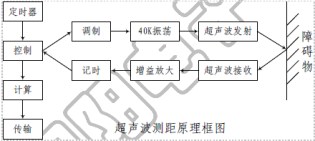
圖3.5 HC-SR04超聲波模塊系統原理圖
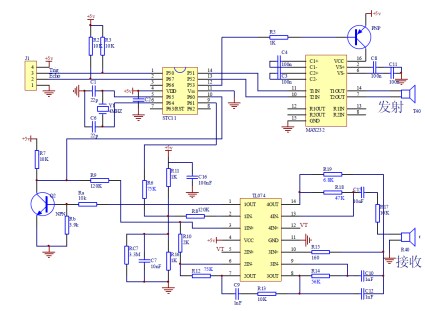
圖3.5 HC-SR04超聲波模塊電路原理圖 3.2.3 溫度檢測電路的設計 由于聲波在空氣中傳播受溫度的影響比較大,為了提高超聲波采集距離的準確性,增加了溫度補償模塊。一般情況下,超聲波的聲波傳播的速度與溫度的變化呈現線性的關系,溫度升高1℃,聲速增加約為0.6m/s [17]。當空氣中的溫度變化幅度較大的時候,超聲波在空氣里的傳播的速度也會相應的改變,兩者的關系如下表: 表3.1 聲波在空氣中傳播與溫度的關系 
因此在考慮溫度的情況下的聲波速度可近似認為: 
 在本課題中,選用DS18B20溫度傳感器模塊作為本系統的溫度補償,該模塊帶有溫度指示燈,可以把溫度物理量轉化為數字量以總線方式傳輸到單片機內運算,DS18B20最低可以測量的溫度為零下125°C,最高可測量125°C,測量的誤差為±0.5°C,DS18B20外引出三根引腳線。分別是VCC線,GND線和數據線,電路圖如下: 
圖3.6 DS18B20溫度傳感器模塊原理圖 3.2.4 轉向裝置的設計 轉向設計得精確與否直接決定這小車成功繞過障礙,轉向裝置的設計結構應簡單緊湊,轉向阻力小,轉向元件的選用控制精度應較高,容易控制,能夠輸出足夠的扭矩使小車轉向前輪轉向.在眾多的智能小車,航模中大多都用到了舵機,舵機是一種角度控制的裝置,作為一種輸出執行機構,舵機通過單片機輸出一定時間的時基脈沖,通過pwm脈沖寬度調制,控制脈沖的占空比,就可以得到相對應的角度,進而實現車輪的轉向.但是在實際控制的時候,舵機編程比較困難,轉速的控制較難。本設計的轉向控制元件選用步進電機,將電機輸出軸通過一個聯軸器連接到前車輪車架上,通過已設計好的避障算法來控制步進電機轉過的角度。步進電機的工作原理是將電信號轉化成一定角度的執行機構,工作適應能力強,受環境影響較小,控制起來較為容易,在眾多的電控系統中,電機的應用最廣泛。 課題中用型號為28BYJ-48的步進電機作為小車的轉向裝置動力,這種電機體積小,控制精度高,誤差小,這種電機屬于永磁式電機,有四相電源線,以八拍的方式通電,電機的主要參數如下表:
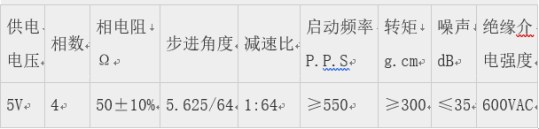
圖3.7 28BYJ-48步進電機參數
電機在5v的電壓下工作,由于其功率輸出不大,帶動能力較弱,因此需要在單片機和電機之間增加一個電機驅動電路,本設計采用了ULN2003電機驅動電路 模塊,驅動電路原理圖如下: 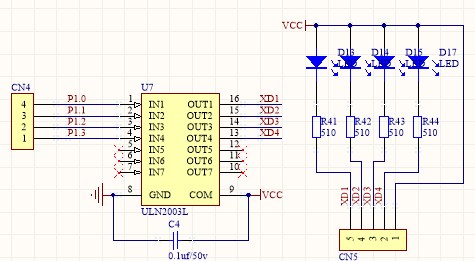
圖3.8 ULN2003電機驅動模塊原理圖 用單片機的P1口的低四位分別接到驅動電路的輸入端子輸出端分別接到電機四個相線端子,就可以驅動電機轉動。步進電機工作的原理圖如下: 
圖3.9 28BYJ-48步進電機內部結構圖
28BYJ-48步進電機內部的定子上有八個齒,相對的兩個齒上通過繞組串聯起來,一共是四對,組成了四相,每一相一端接電源,一段接地.轉子上有六個齒,每一個都帶有磁性。其工作原理是當B相通電時,在磁場力中,纏著繞組的轉子齒發生轉動,此時轉子兩頭就會正對著B相的兩個齒,此時轉子的1齒的兩邊會與C相形成一定的角度。當把B相電源斷開,C相送上電源時,轉子再次轉動,使1齒和4齒向逆時針方向轉動,此時1齒的兩邊又會正對著c相繞組的兩個齒,同理2齒的兩邊又會和D相繞組的兩個齒形成一定的夾角,以此類推,如果先給B相通電,然后是C相,其次是D相,最后是A相,轉子轉動的方向就會相反,而這個轉過的角度就是一個步距角,通電一次轉子轉過一個角度為一拍,每次只通電一相,這種方式稱為單四拍,當通電完成了一個四拍,轉子轉過的范圍就是一個定子,如果轉過了八個定子,這時轉子就轉過了一圈,則需要32拍,轉子轉一拍所轉的角度就是步距角,不難算出,步距角為 。 。 如果通電方式改為兩相同時通電,則相鄰的兩組定子齒都會產生相同的磁場力,此時轉子齒不會正對著定子齒,而是相鄰的兩個轉子齒連線的中心線和相鄰兩個定子齒連線的中心線共線,此時每通電一拍,轉子轉過的角度為原來單拍通電轉過角度的一般,即5.625°,則轉子轉過一個定子齒則需要8拍,轉子轉過一圈就需要64拍,由于兩相同時通電而產生的中間拍,會在原來的單四拍之間增加一定的力量,這就會增大電機的輸出扭矩。電機在機械結構上有一個四級傳動,傳動比為1:64,要使電機輸出軸轉動一圈,則需要讓轉子轉轉64圈,需要通電64*64=4096拍.28BYJ-48步進電機向外引出五條線,電機的外部結構如下圖: 
圖3.10 28BYJ-48步進電機外觀圖 紅線作為電源公共端,接5v電壓供電其余的橙色,黃色,粉紅色,藍色則對應著ABCD
四相端子,如想要使某一相通電,便把哪一相接地便可,單八拍模式如圖: 
圖3.11 28BYJ-48步進電機八拍示意圖 當把A相接通時,則將對應接口的單片機引腳輸入低電平即0,八拍的通電模式應該是A-AB-B-BC-C-CD-D-DA,連續向單片機輸入這些數據,就可以讓電機連續轉動。當超聲波檢測到障礙時,數據發送到單片機,觸發單片機相應程序給定電機一定的啟動頻率,根據設定的轉過的角度進行避障,電機輸出軸的轉速由脈沖的頻率決定,輸出一定的脈沖個數就可以讓電機停在預期的位置。 3.2.5避障方式的設計 在機器人的避障研究中,控制機器人動作的方法是特定的路徑規劃,以達到它的長遠目標 [18]。在此避障設計中,也是按照路徑規劃的思想設計無碳小車的避障算法,避障算法是整個電控小車設計得核心,也是設計的難點,在避障算法中,小車的整體尺寸,賽道的情況,小車行走的狀態,都是避障算法的關鍵,小車最理想的行走狀態就是小車中軸線與賽道的中軸線重合,但是在實際中不會完全重合,這就要依靠電機來控制小車,因此需要將左右超聲波與賽道的距離分解,分解成與賽道垂直和平行的兩個方向兩量,如下圖:
圖3.12 超聲波測距距離分解圖
設置一個小車到障礙物的安全距離FS,根據安全距離的值來判定小車是否轉向。左右兩側的超聲波與賽道的方向分量LcS和RcS的值不一樣時,將會決定著小車向哪方向發生偏轉。小車在賽道行駛中會出現以下三種情況,第一種如圖a小車中軸線與賽道中軸線不重合,障礙物沒有完全遮擋住超聲波的探測范圍,因此這種情況會導致超聲波存在探測盲區,小車前邊的超聲波將不會采集到賽道信息,小車避障會失敗。第二種情況如圖b,小車距離賽道的距離大于障礙物的長度,此時小車對前方的物體無能為力,也就不能轉彎,但是隨著與障礙物的距離越來越近,LcS和RcS的差值會越來越大,此時小車會發生不必要的轉向.第三種情況如圖c,小車與賽道的距離小于賽道與中軸線的距離,此時前端的超聲波可以完全檢測到障礙物,使小車發生轉彎,但小車不一定能在中軸線上行駛。  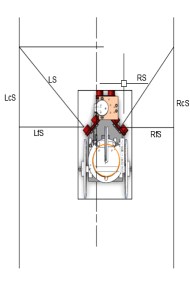
 (a)超聲波部分測距 (b)超聲波不測距 (c)超聲波完全檢測 圖3.13 小車遇障圖
結合賽道的情況和這三種情況,根據題目要求,障礙強高80mm,障礙擋板長度要伸出賽道中軸線100-150mm,根據小車整體寬度為124mm,為了使前邊的超聲波都能夠識別到障礙物,盡量使小車盡量行駛在賽道中間,設定 LfS與RfS的差值在一個范圍內,如果超出了這個范圍,超聲波測距的值將會傳送到單片機,控制電機的轉角,使小車盡量行走在賽道中間,不至于發生過大的偏轉。 3.2.6 避障算法的設計 為了簡化小車的避障算法,將使電機控制小車在賽道中軸線行駛,具體算法過程如下: 小車的寬度為124mm,為了使小車更容易的轉向,將小車的轉彎半徑設計稍大一些,小車在距障礙物近時,轉彎半徑會大些,距離遠則會半徑小,為了使小車轉彎的時候更流暢,不發生側翻,故可以對安全距離和小車的關系建立數學模型,建立一個反比例函數, ,當電機設定了轉過一定的角度后,將總的度數分為y份,x代表安全距離,a代表小車轉彎時的平滑度,決定著小車轉彎是否平穩,b為小車距離的控制量,當小車與障礙物的距離過小時,不至于電機處于不反應狀態,其數學模型如圖: ,當電機設定了轉過一定的角度后,將總的度數分為y份,x代表安全距離,a代表小車轉彎時的平滑度,決定著小車轉彎是否平穩,b為小車距離的控制量,當小車與障礙物的距離過小時,不至于電機處于不反應狀態,其數學模型如圖: 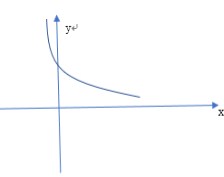
圖3.14 小車遇障圖 這樣就可以控制電機轉彎的平滑度。當賽道左邊有障礙物時,首先設置FS的最小轉向距離,小車前方的超聲波距離障礙物擋板的距離為S,起初在沒有遇到障礙物時,LS=RS,其距離分量也相等,當小車繼續前進遇到障礙物時,此時單片機會向電機發出轉向的指令,與此同時,左右超聲波與障礙物距離的垂直分量LcS和RcS會進行一個數值的比較,當障礙物的距離越來越近時, LcS和RcS的差值會慢慢變大,LcS會越來越小,RcS的數值不變,當達到一定差值范圍內,單片機就會再次發送發送指令,當前方的安全距離和左右距離的差值都滿足條件后,電機就開始轉彎。實現小車的左右轉向,使小車向右方轉彎,如圖:

圖3.15 小車轉彎
小車轉彎時,三個超聲波轉會暫時被關掉,不會再測量距離,小車會向右前方行走,經過時間t1時,小車與左邊賽道的距離大于障礙物長度,電機又會使小車發生轉向,使小車大致與平行賽道行走,經過短暫的時間t2后,小車又一次轉彎,向左前方行走,經過時間t3,小車已完全繞過障礙,此時再起啟動超聲波,使小車回到賽道的中軸線上,以此原理,小車可以繞過多個障礙, 小車避障的軌跡近似于等腰梯形 ,軌跡如下圖: 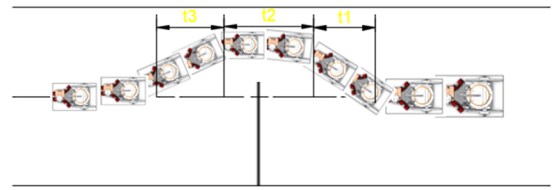
圖3.16 小車轉彎軌跡 t1,t2,t3的數值由實際運動中調試確定。 3.2.7 信號指示電路的設計 為了更直觀的觀察超聲波的工作狀態,設計了一組6個工作指示燈,每個指示燈與一個電阻值為510歐姆的電阻,每個指示燈對應一個超聲波引腳,采用了共陽極的接法,通過對指示燈的觀察來判斷超聲波是否正常工作,方便檢修,指示燈電路如下:
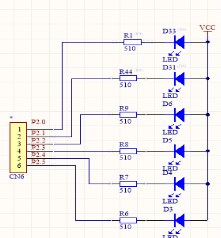
圖3.17 超聲波工作狀態指示燈
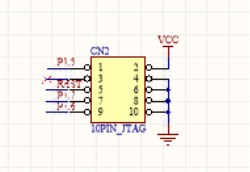
3.2.8 程序下載模塊設計 程序編號之后。需要把程序一直到單片機中,使系統工作,下載口采用單片機最小系統模塊自帶的ISP編程燒錄方式下載,選用了免驅動型的USBASP下載模塊,該下載器不用安裝驅動,使用USB接口供電,采用了標準的IDC10引腳口,插入電腦后就會自動識別下載器,下載流暢.其模塊硬件圖和單片機連接圖如下:
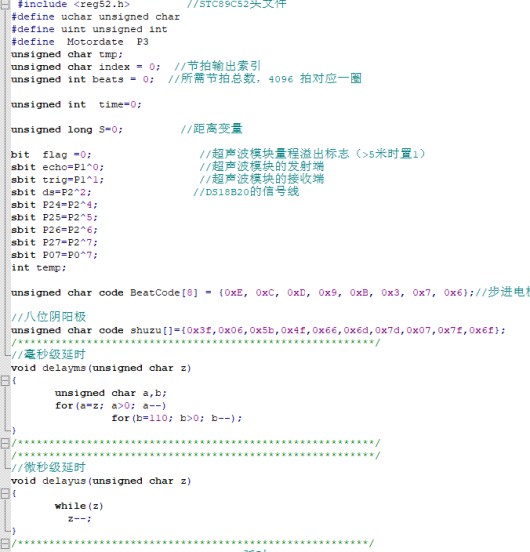
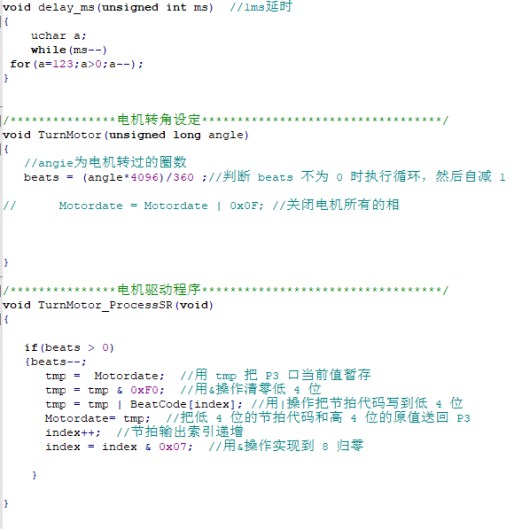
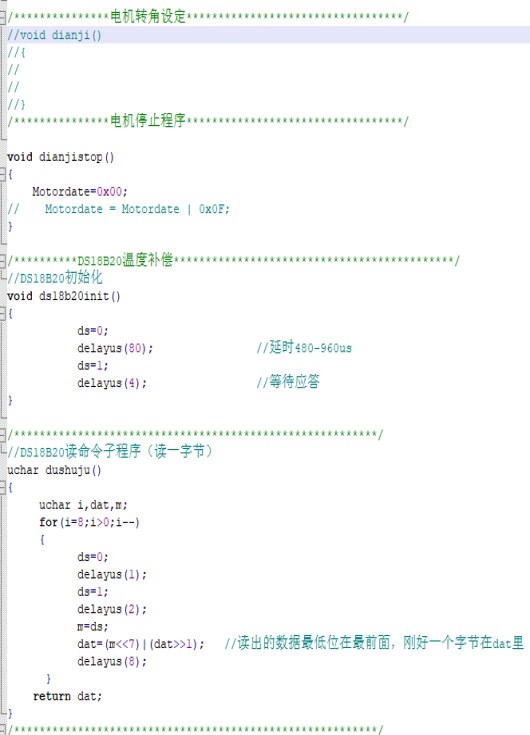
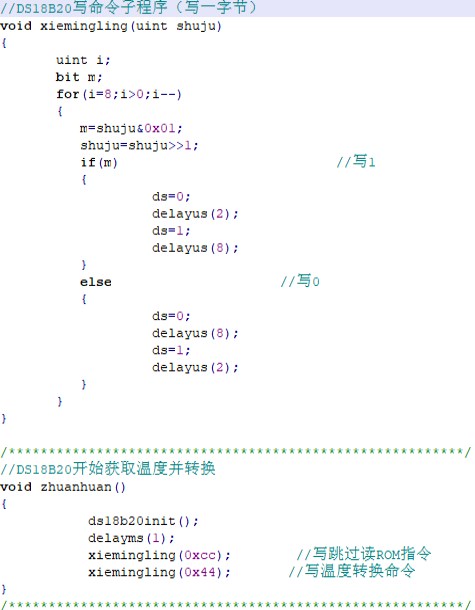
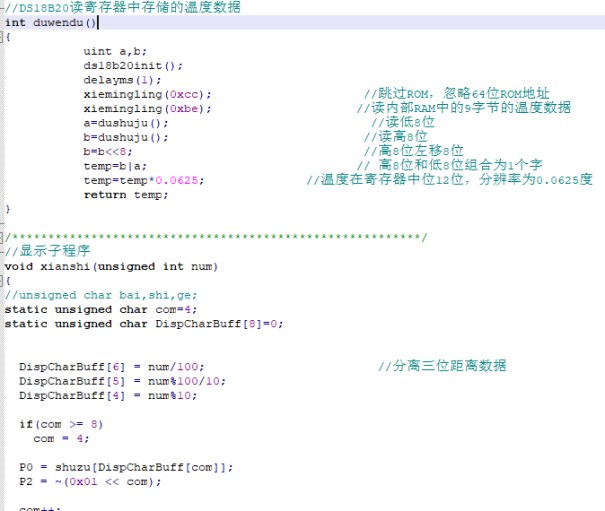
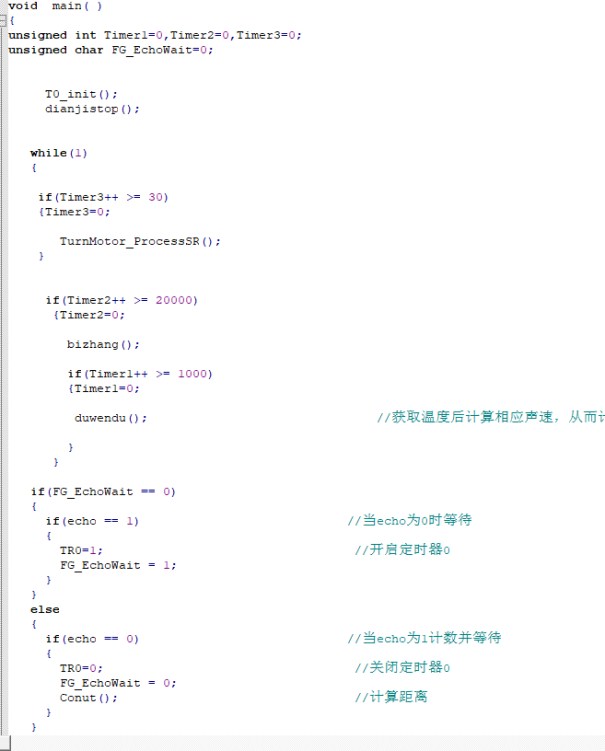
圖3.18 IPS程序下載電路 3.3 軟件的設計 在硬件設計好之后,就需要通過一定的指令協調各個模塊進行正常的工作,軟件采用c語言編程,c語言應用廣,可移植性較強,容易編寫,易懂,產生的很少的機器代碼,對運行環境的條件較低,c語言比較通用,在系統和軟件的開發有著非常廣的應用。功能多,有著很多的數據類型,最為靈活方便的就是指針功能,大大提高了程序指令的效率。 控制硬件最要的部分就是軟件的設計,只有設計好控制的指令,才會使硬件發揮功能,需要經過反復的調試試驗 [19]。在本軟件設計中,為了編程方便,使讀者更容易理解,因此采用模塊化編程的思想,將整個系統分為,超聲波程序模塊,電機驅動程序模塊,溫度模塊,方便日后的程序調試,具體的流程圖如下:
3.4 機電系統的安裝與調試
在機械部分和電控部分都設計好之后,接下來就是實現最后的避障功能,將電控各部分模塊組裝好之后,由于機械部分的結構緊湊,空間小,所以合理的安裝電控模塊也是非常重要的,在機電部分安裝之后,將程序通過下載器下載到單片機內,先給電路部分通電,在將小車放入賽道中,首先調試左右兩邊超聲波與賽道兩邊的距離,實時控制電機的轉角,使小車盡量在賽道中間行走,然后確保前方超聲波與障礙物的安全距離,確保小車在轉彎時不能與障礙物相撞,合理的選用轉角半徑,最后在轉彎過程中,合理的調試小車繞過障礙的時間。

完整的Word格式文檔51黑下載地址:
 設計文檔.doc
(1.32 MB, 下載次數: 24)
設計文檔.doc
(1.32 MB, 下載次數: 24)
2019-3-9 01:01 上傳
點擊文件名下載附件
下載積分: 黑幣 -5
| 








 QQ好友和群
QQ好友和群 QQ空間
QQ空間 騰訊微博
騰訊微博 騰訊朋友
騰訊朋友 收藏
收藏 淘帖
淘帖 頂
頂 踩
踩

