|
ժҪ 1�O(sh��)Ӌ(j��)�΄�(w��) 2���� 2.1 �O(sh��)Ӌ(j��)˼·�c���� 2.2���w�O(sh��)Ӌ(j��)��D 3ϵ�y(t��ng)��(sh��)�F(xi��n)��ԭ���f(shu��)�� 3.1 ���M(j��n)늙C(j��)���ƹ���ԭ�� 3.1.1���M(j��n)늙C(j��)�Ĺ���ԭ�� 3.1.2 ���M(j��n)늙C(j��)�Ć�ͣ���� 3.1.3 ���M(j��n)늙C(j��)���D(zhu��n)����� 3.2����(sh��)�@ʾģ�Kԭ�� 4Ӳ���O(sh��)Ӌ(j��) 4.1ϵ�y(t��ng)��ԭ��D 4.2������Ӳ��ԭ��D�O(sh��)Ӌ(j��) 4.2.1 ��Ƭ�C(j��)����ģ�K 4.2.2���I�x������B(t��i)ģ�K 4.2.3���M(j��n)늙C(j��)����ģ�K 4.2.4������B(t��i)�@ʾģ�K 4.2.5 4λ��(sh��)�a���@ʾ����(sh��)ģ�K 5ܛ���O(sh��)Ӌ(j��) 5.1ϵ�y(t��ng)���w�O(sh��)Ӌ(j��) 5.2���M(j��n)늙C(j��)����ģ�K 5.2.1���M(j��n)늙C(j��)�Ĺ�����ʽ�f(shu��)�� 5.2.2�O(sh��)Ӌ(j��)�f(shu��)�������̈D 5.3��(sh��)�a�ܲ���(sh��)�@ʾģ�K 6�����{(di��o)ԇӛ� 7�ĵ��w��(hu��) �����īI(xi��n) ��䛣��������
ժҪ���O(sh��)Ӌ(j��)Ԕ��(x��)��B�˻��چ�Ƭ�C(j��)�����ಽ�M(j��n)늙C(j��)����ϵ�y(t��ng)�����M(j��n)늙C(j��)ͨ�^(gu��)ݔ���}�_��̖(h��o)�M(j��n)�п��ƣ���늙C(j��)�Ŀ��D(zhu��n)��(d��ng)�Ƕ���ݔ���}�_����(sh��)�Q������ˣ���Ƭ�C(j��)ͨ�^(gu��)���M(j��n)늙C(j��)�l(f��)�Ϳ�����̖(h��o)���܌�(sh��)�F(xi��n)��(du��)���M(j��n)늙C(j��)�Ŀ��ơ� ��Ƭ�C(j��)��(sh��)�F(xi��n)�IJ��M(j��n)늙C(j��)����ϵ�y(t��ng)���гɱ��͡�ʹ���`������c(di��n)��ԓϵ�y(t��ng)����80C51��Ƭ�C(j��)��������оƬ����(l��i)��Ɍ�(du��)���M(j��n)늙C(j��)�D(zhu��n)��(d��ng)��LED�@ʾ�Ŀ��ơ� ���O(sh��)Ӌ(j��)��Ҫ�Ɇ�Ƭ�C(j��)80C51��3�ಽ�M(j��n)늙C(j��)��7�Δ�(sh��)�a�ܣ���һЩ�������P(gu��n)Ԫ���O(sh��)Ӌ(j��)���ɣ��֞鰴�I�x������B(t��i)ģ�K�����M(j��n)늙C(j��)����ģ�K��LED���O���@ʾ������B(t��i)ģ�K�Լ�4λ��(sh��)�a���@ʾ����(sh��)ģ�K������ͨ�^(gu��)�_(k��i)�P(gu��n)��(l��i)����ϵ�y(t��ng)�Ć�/ͣ��������(d��ng)ϵ�y(t��ng)�\(y��n)�D(zhu��n)�r(sh��)�����_(k��i)�P(gu��n)��(l��i)���Ʒ���ʹ����(y��ng)��ָʾ������ͬ�����_(k��i)�P(gu��n)��(l��i)�x����ģʽ���\(y��n)�D(zhu��n)�r(sh��)����4λ7�Δ�(sh��)�a�܁�(l��i)ݔ������(sh��)��������(j��)˼·���O(sh��)Ӌ(j��)����(l��i)��Ӳ���D�O(sh��)Ӌ(j��)���m��(y��ng)��ܛ���� �·�Y(ji��)��(g��u)��(ji��n)�Σ��O(sh��)Ӌ(j��)˼·������ͬ�r(sh��)����Proteus�M(j��n)��(li��n)�{(di��o)���棬�Y(ji��)�����^ֱ�^������Y(ji��)���յ����A(y��)�ڵ�Ч����
1�O(sh��)Ӌ(j��)�΄�(w��)��һ���O(sh��)Ӌ(j��)���෴��(y��ng)ʽ���M(j��n)늄�(d��ng)�C(j��)�}�_�������������}�_ݔ�룬Ҫ�����������ġ����������\(y��n)�з�ʽ���ƣ��ƽ���������D(zhu��n)���ƣ��ƽ���� ϵ�y(t��ng)�������¹��ܣ���K0-K2����ͨ늷�ʽ�x���I��K0�����������ģ�K1�������p���ģ�K2���������ģ�K3�醢��(d��ng)/ֹͣ���ơ�K4������ƣ���4λLED��(sh��)�a���@ʾ��������(sh��)����3��(g��)�l(f��)����O���@ʾ��B(t��i)�����D(zhu��n)�r(sh��)�t���������D(zhu��n)�r(sh��)�S���������D(zhu��n)�r(sh��)�G������
�������΄�(w��)���� ���M(j��n)늄�(d��ng)�C(j��)��һ�N����}�_��̖(h��o)�M(j��n)�п���,������}�_��̖(h��o)�D(zhu��n)�Q������(y��ng)�Ľ�λ�ƵĈ�(zh��)������ÿһ��(g��)�}�_��̖(h��o)��ʹ���M(j��n)늙C(j��)���D(zhu��n)һ��(g��)�̶��ĽǶ�,�@��(g��)�ǶȷQ(ch��ng)�鲽��ǡ��������}�_�Ŀ���,���D(zhu��n)�ӵĽ�λ�������ٶȇ�(y��n)����cݔ���}�_�Ĕ�(sh��)�����}�_�l�ʳ����ȡ� 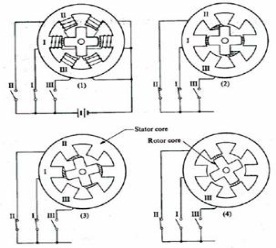
���෴��(y��ng)ʽ���M(j��n)늄�(d��ng)�C(j��)�Y(ji��)��(g��u)��D1.8��ʾ��늙C(j��)����������(g��)�ŘO������(du��)�ĴŘO��ͬһ�@�M��(l��)�ţ�����(g��)늙C(j��)������(g��)�@�M����Y�νӷ��Ӿ����D(zhu��n)�Ԟ�ܛ�Ų��ϣ��o(w��)�@�M�����@�Mͨ����?y��n)�?��-��-��-��-��-�����t늄�(d��ng)�C(j��)��r(sh��)��D(zhu��n)��(d��ng)�����@�Mͨ����?y��n)�?��-��-��-��-��-�����t늄�(d��ng)�C(j��)형r(sh��)��D(zhu��n)��(d��ng)���˷N���Ʒ�ʽ�Q(ch��ng)�����������ķ�ʽ�� ��ͨ����?y��n)�?���-��-���-��-���-������r(sh��)ᘣ����Q(ch��ng)���������ķ�ʽ��
���M(j��n)늙C(j��)�����b�ðl(f��)���\(y��n)�з�ʽ�����D(zhu��n)��������D(zhu��n)�Ƕȣ�����(sh��)����ǰ���(xi��ng)һ�����ƽ��ʾ����һ�(xi��ng)���}�_��(g��)��(sh��)��ʾ���}�_����������(j��)���M(j��n)늙C(j��)�����b�ðl(f��)��(l��i)������ƽ��̖(h��o)���}�_��ʹ���M(j��n)늙C(j��)����Ҫ��Ĺ�����ʽ�����D(zhu��n)������(sh��)���D(zhu��n)�����M(j��n)늙C(j��)�ŘO�����D(zhu��n)���������ƣ�����^(gu��)�죬늄�(d��ng)�C(j��)��(hu��)���F(xi��n)ʧ���F(xi��n)���D(zhu��n)�Ը����ϴŘO�����D(zhu��n)�����e����늄�(d��ng)�C(j��)����ͣ�A�Σ�Ҫ�����}�_�������ƴ�ʩ�� ������ϵ�y(t��ng)Ӳ��ԭ��D 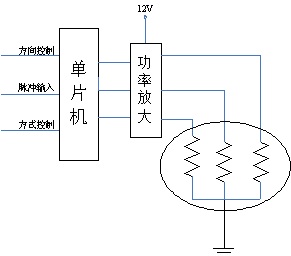

���ģ�ϵ�y(t��ng)ܛ���O(sh��)Ӌ(j��)
���ֹݔ���}�_�l���^(gu��)�쌧(d��o)��늄�(d��ng)�C(j��)ʧ�����Ɍ�ݔ���}�_�چ�Ƭ�C(j��)���棬֮�����M(j��n)���}�_���䣬����r(sh��)ע���}�_���ʡ��}�_ݔ��ģ�K��ÿ��(g��)ݔ���}�_����(l��i)�r(sh��)���������Ԫ�M(j��n)�м�1Ӌ(j��)��(sh��)���}�_����ģ�K�r(sh��)�̒��辏���Ԫ����(d��ng)�����Ԫ������r(sh��)��ʹ���M(j��n)늙C(j��)���D(zhu��n)һ����֮���Ԫ�p1���p��0�r(sh��)ֹͣ�����}�_����ʹ�����ƽͬ�r(sh��)׃���������Б�(y��ng)���Կ��]����ͬ�������}�_���܌�(d��o)��늙C(j��)�e(cu��)�D(zhu��n)�� 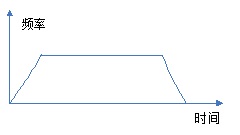 ��ʹ늄�(d��ng)�C(j��)������ٶ��\(y��n)�У��}�_�������ʑ�(y��ng)���������������䣬��D1.10��ʾ���Dʾ�ĺ��x�ǣ��_(k��i)ʼ�r(sh��)�����D(zhu��n)�٣��}�_����Ҫ������(d��ng)늄�(d��ng)�C(j��)���D(zhu��n)����(l��i)���}�_������u�ӿ죬���_(d��)��������ʣ���(d��ng)Ҫֹͣ�r(sh��)��Ҳ�����R��ֹͣ������Ƚ����}�_���ʣ�����㣬늄�(d��ng)�C(j��)ͣ�D(zhu��n)�� ��ʹ늄�(d��ng)�C(j��)������ٶ��\(y��n)�У��}�_�������ʑ�(y��ng)���������������䣬��D1.10��ʾ���Dʾ�ĺ��x�ǣ��_(k��i)ʼ�r(sh��)�����D(zhu��n)�٣��}�_����Ҫ������(d��ng)늄�(d��ng)�C(j��)���D(zhu��n)����(l��i)���}�_������u�ӿ죬���_(d��)��������ʣ���(d��ng)Ҫֹͣ�r(sh��)��Ҳ�����R��ֹͣ������Ƚ����}�_���ʣ�����㣬늄�(d��ng)�C(j��)ͣ�D(zhu��n)��
�D1.10 �}�_���ʷ���
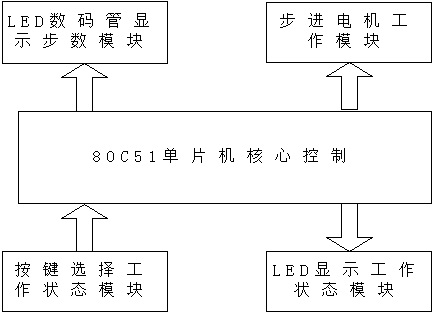
2���� 2.1 �O(sh��)Ӌ(j��)˼·�c���������O(sh��)Ӌ(j��)��һ��(g��)��(du��)�����ಽ�M(j��n)늙C(j��)�Ŀ���ϵ�y(t��ng)������Ƭ�C(j��)��(sh��)�F(xi��n)�IJ��M(j��n)늙C(j��)����ϵ�y(t��ng)���гɱ��͡�ʹ���`������c(di��n)����ϵ�y(t��ng)�x��51��Ƭ�C(j��)���ɡ� ����(j��)Ҫ������(g��)�O(sh��)Ӌ(j��)���w�ɷ֞��ĉK�� һ��5��(g��)���IK0~K4���Ñ�(h��)�����(l��i)�x���M(j��n)늙C(j��)�Ĺ�����B(t��i)���҂����_(k��i)�P(gu��n)�B���Ƭ�C(j��)��P1�ڣ�ͨ�^(gu��)���I�_(k��i)�P(gu��n)�ĸߵ��ƽ��B(t��i)��(l��i)�x���҂�����Ŀ�����̖(h��o)��Ӳ����ֱ�Ӱ��_(k��i)�P(gu��n)�քe���چ�Ƭ�C(j��)�Ľӿ��ϣ�ͨ�^(gu��)��ԃ(x��n)�˿���̖(h��o)��(l��i)��(d��ng)������������̖(h��o)̎�������O(sh��)Ӌ(j��)�_(k��i)�P(gu��n)���֕r(sh��)��߀���]���C(j��)е����(d��ng)��Ӱ푣���ȡӲ����ʽ����(li��n)��݁�(l��i)ȥ���� ����3��(g��)LED�l(f��)����O�ܵ��@ʾ���M(j��n)늙C(j��)������B(t��i)ģ�K�����O(sh��)Ӌ(j��)Ҫ���в��M(j��n)늙C(j��)���D(zhu��n)�Ǽt���������D(zhu��n)���S������ֹͣ���D(zhu��n)�ǾG�������O(sh��)Ӌ(j��)�Ќ�3��(g��)�l(f��)����O�ܷքe�ӵ���Ƭ�C(j��)P3�ڣ��ܵ���Ƭ�C(j��)��ݔ����̖(h��o)���ơ� ���Dz��M(j��n)늙C(j��)�Ĺ���ģ�K��Ҫ�벽�M(j��n)늙C(j��)�����҂���Ҫ�ķ�ʽ�\(y��n)�D(zhu��n)�������M(j��n)늙C(j��)һ�˽ӵ�+12V���Դ��һ�˽ӵ���Ƭ�C(j��)P3�ڣ��܆�Ƭ�C(j��)��ݔ����̖(h��o)���ơ� ����4λ��(sh��)�a���@ʾ����(sh��)��ģ�K���O(sh��)Ӌ(j��)����Ҫ������ܛ�����̵��㷨��(l��i)��(sh��)�F(xi��n)����(sh��)����Ӌ(j��)���@ʾ��ͬ�ӣ�4λ��(sh��)�a�ܽӵ���Ƭ�C(j��)��P0�ں�P2���܆�Ƭ�C(j��)ݔ����̖(h��o)�Ŀ��ƣ���Ӳ����ʹ�õ��DŽ�(d��ng)�B(t��i)�@ʾ�Ľӷ��� �ɴ˿�֪����Ҫ�O(sh��)Ӌ(j��)һ��(g��)ϵ�y(t��ng)������ͨ�^(gu��)��ͬ���I��(l��i)�x���M(j��n)늙C(j��)�Ĺ�����ʽ������LED�l(f��)����O�܁�(l��i)�@ʾ늙C(j��)��(du��)��(y��ng)�Ĺ�����B(t��i)������֮��߀���ڔ�(sh��)�a�����@ʾ�����M(j��n)늙C(j��)�D(zhu��n)��(d��ng)�IJ���(sh��)�� 2.2���w�O(sh��)Ӌ(j��)��D��ϵ�y(t��ng)��Ҫ�Ɇ�Ƭ�C(j��)�����M(j��n)늙C(j��)������(sh��)�@ʾģ�K��������B(t��i)�����c�@ʾģ�K�M�ɡ����w��D��D1��
�D1 ϵ�y(t��ng)���w��D 3ϵ�y(t��ng)��(sh��)�F(xi��n)��ԭ���f(shu��)��
3.1 ���M(j��n)늙C(j��)���ƹ���ԭ��
3.1.1���M(j��n)늙C(j��)�Ĺ���ԭ�����M(j��n)늙C(j��)�IJ�ͬ�(q��)��(d��ng)��ʽ�������ڹ����r(sh��)���}�_��̖(h��o)��һ�����݆���ӵ������@�M�ϣ��Ķ���(sh��)�F(xi��n)��ͬ�Ĺ�����B(t��i)������ͨ����ͬ�����\(y��n)�з�ʽ�������������ġ������p���ĺ������Ρ��p�������N��ע�⣺���桰���������ġ��еġ����ࡱָ�����������@�M�����ġ���ָ�����@�M��׃һ��ͨ늷�ʽ�������ġ���ʾͨ��������һ��(g��)ѭ�h(hu��n)���������p���ġ��еġ��p����ָͬ�r(sh��)�Ѓ����@�Mͨ늣��� 1.2.1�����������\(y��n)�з�ʽ�����(y��)�D��ʾ�鷴��(y��ng)ʽ���M(j��n)늄�(d��ng)�C(j��)����ԭ��D����ͨ�^(gu��)�}�_������ݔ���ĵ�һ��(g��)�}�_ʹA���@�Mͨ늣�B,C���@�M��ͨ늣���A���@�Mͨ늺�a(ch��n)���Ĵň�(ch��ng)��ʹ�D(zhu��n)�� �Ϯa(ch��n)������(y��ng)�D(zhu��n)�أ��D(zhu��n)�ӵ�1��3�X���c���ӴŘO��(du��)�R������D��a����ʾ���ڶ���(g��)�}�_����(l��i)��ʹB���@�Mͨ늣���A��C���@�M��ͨ늣�B���@�M�a(ch��n)���Ĵň�(ch��ng)�� ʹ�D(zhu��n)�ӵ�2��4�X�cB��ŘO��(du��)�R����D��b����ʾ���c�D��a����ȣ��D(zhu��n)����r(sh��)�?l��)����D(zhu��n)��(d��ng)��һ��(g��)�Ƕȡ�������(g��)�}�_����(l��i)����C���@�Mͨ늣��� A��B�ͨ늣��@�r(sh��)�D(zhu��n)�ӵ�1��3�X��(hu��)�cC�M��(du��)�R���D(zhu��n)�ӵ�λ����D��c)��ʾ���c�D��b)���^������r(sh��)��D(zhu��n)�^(gu��)��һ��(g��)�Ƕȡ� 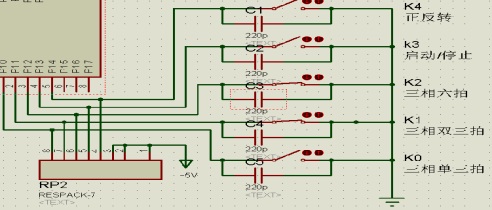 �D1.1 ����(y��ng)ʽ���M(j��n)늙C(j��)����ԭ��D ��(d��ng)�}�_���ൽ��(l��i)�r(sh��)��ͨ�^(gu��)������ʹ���ӵ��@�M����A��--B��--C��--A�����Ҏ(gu��)�ɲ���ؽ�ͨ�c���_(k��i)���@�r(sh��)���M(j��n)늄�(d��ng)�C(j��)���D(zhu��n)�Ӿ��B�m(x��)��ͣ��һ��������r(sh��) �?l��)����D(zhu��n)��(d��ng)�������׃���M(j��n)늄�(d��ng)�C(j��)���D(zhu��n)��(d��ng)����ֻҪ�����Ӹ��@�Mͨ늵����Ğ�A��--C��--B��--A�࣬�D(zhu��n)���D(zhu��n)��(d��ng)���Ğ�형r(sh��)�?l��)���?/p> �����ķ��䷽ʽ�r(sh��)�����M(j��n)늄�(d��ng)�C(j��)��A��ͨ��D(zhu��n)�Q��B��ͨ늣����M(j��n)늄�(d��ng)�C(j��)���D(zhu��n)���D(zhu��n)�^(gu��)һ��(g��)�Ƕȣ��Q(ch��ng)��һ�����@�r(sh��)�D(zhu��n)���D(zhu��n)�^(gu��)�ĽǶ���30�ȡ����M(j��n)늄�(d��ng)�C(j��)ÿһ���D(zhu��n)�^(gu��)�ĽǶȷQ(ch��ng)�鲽��ǡ� 1.2.2�����p�����\(y��n)�з�ʽ�����p�����\(y��n)�з�ʽ��ÿ�ζ��Ѓɂ�(g��)�@�Mͨ늣�ͨ늷�ʽ��AB--BC--CA--AB���������ͨ����Ğ�AB--CA--BC--AB�����t���M(j��n)늙C(j��)���D(zhu��n)���p���ķ��䷽ʽ�r(sh��)�����M(j��n)늄�(d��ng)�C(j��)�IJ����Ҳ��30�� 1.2.3�����Σ��p�����\(y��n)�з�ʽ���������ķ��䷽ʽ����ÿ��(g��)���ڃ�(n��i)������(g��)ͨ늠�B(t��i)���@����ͨ늠�B(t��i)��������ʹA--AB--B--BC--C--CA--A��������A-- CA--C--BC--B--AB--A��������ͨ늷�ʽ�У���һ��(g��)�r(sh��)�̃ɂ�(g��)�@�Mͬ�r(sh��)ͨ늣��@�r(sh��)�D(zhu��n)���X��λ�Ì�λ��ͨ늵ă�������gλ�á����������ķ��� ��ʽ�£��D(zhu��n)��ÿһ���D(zhu��n)�^(gu��)�ĽǶ�ֻ���������ķ�ʽ�µ�һ�룬�������15�ȡ� �������\(y��n)�е�ͻ����(w��n)�}��ÿ��ֻ��һ���@�Mͨ늣����D(zhu��n)�Q�^(gu��)���У�һ���@�M��늣���һ���@�Mͨ늣����װl(f��)��ʧ��������ο�һ���@�Mͨ������D(zhu��n)�ӣ���(w��n)���Բ��ã�������ƽ��λ�ø�����ʎ�����õ��^�١� �p�����\(y��n)�е����c(di��n)��ÿ�ζ��Ѓ����@�Mͨ늣������D(zhu��n)�Q�^(gu��)����ʼ�K��һ���@�M����ͨ늠�B(t��i)����˹�����(w��n)�����Ҳ�����c��������ͬ�� �����\(y��n)�з�ʽ�D(zhu��n)�Q�r(sh��)ʼ�K��һ���@�Mͨ늣��Ҳ�����^С���ʹ�����(w��n)���Ժã����Դ�^��(f��)�s����(sh��)�H��(y��ng)���^�ࡣ 3.1.2 ���M(j��n)늙C(j��)�Ć�ͣ�������M(j��n)늙C(j��)������늚�����,�\(y��n)�D(zhu��n)�r(sh��)��(hu��)�в��M(j��n)�� ,�����(d��ng)�С�����ʹ늙C(j��)�D(zhu��n)��(d��ng)ƽ�� ,�pС���(d��ng) ,���ڲ��M(j��n)늙C(j��)�����}�_�������غ��½��ز��ü�(x��)�ֵ����β� ,���ԜpС���M(j��n)늙C(j��)�IJ��M(j��n)�� ,���늙C(j��)�\(y��n)�е�ƽ��(w��n)�ԡ��ڲ��M(j��n)늙C(j��)ͣ�D(zhu��n)�r(sh��) ,���˷�ֹ��T�Զ�ʹ늙C(j��)�S�a(ch��n)��혻� ,�t����ú��m���i������ ,�a(ch��n)���i�������� ,�i�����M(j��n)늙C(j��)���D(zhu��n)�S ,ʹ���M(j��n)늙C(j��)���D(zhu��n)�S���������D(zhu��n)��(d��ng)�� 3.1.3 ���M(j��n)늙C(j��)���D(zhu��n)���������o��������ʽ����Q��ͨ� ,���M(j��n)늙C(j��)���D(zhu��n)�������M(j��n)늙C(j��)�Ą�(l��)�ŷ�ʽ���������� ,�� A-AB-B-BC-C-CA�����������ͨ늓Q�� ,���t늙C(j��)�ͷ��D(zhu��n)��������ʽ��r�(l��i)�ơ� 3.2����(sh��)�@ʾģ�Kԭ������(sh��)�@ʾģ�K������B(t��i)�@ʾģ�K������ͨ�^(gu��)��Ƭ�C(j��)ݔ����̖(h��o)���ưl(f��)����O��LED�����硣���в���(sh��)�@ʾģ�K��LED��(g��u)�ɔ�(sh��)�a�ܣ�Ҫ���@ʾ4λʮ�M(j��n)�Ɣ�(sh��)�����õ�4λ��(sh��)�a�ܡ�Ҫ���ƶ�λ���@ʾ�·����Ҫ���ֶο��ƺ���λ���ơ����Ʒ�ʽ�֞��o�B(t��i)�@ʾ��ʽ�̈́�(d��ng)�B(t��i)�@ʾ��ʽ���o�B(t��i)�@ʾ��ʽ��ÿһλ���@ʾ������Ҫ��һ��(g��)8λݔ���ځ�(l��i)ݔ��ԓ��λ���߶δa����ҪƬ��U(ku��)չݔ���ڡ�����(d��ng)�B(t��i)�@ʾ��ʽ������(sh��)�a�ܵČ�(du��)��(y��ng)�ֶε����_����(li��n)��һ�𣬾�·��(ji��n)�Σ��p�ٽӿڣ�����Ƭ��U(ku��)չ���@���x�Ä�(d��ng)�B(t��i)�@ʾ��ʽ��
4Ӳ���O(sh��)Ӌ(j��)
4.1ϵ�y(t��ng)��ԭ��D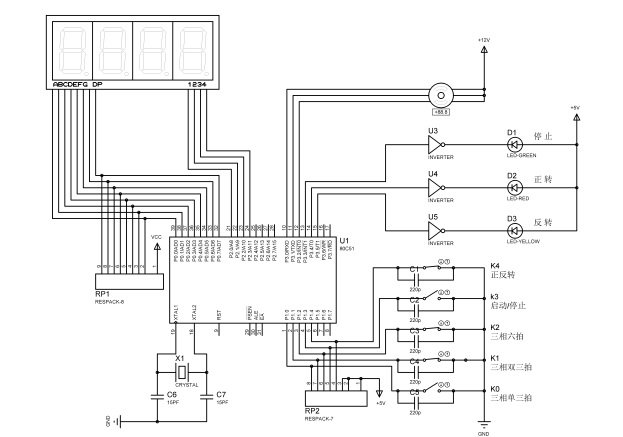 �D3 ϵ�y(t��ng)��ԭ��D �D3 ϵ�y(t��ng)��ԭ��D
����(j��)�O(sh��)Ӌ(j��)Ҫ����PROTEUS������Ӳ���B���D��D3�� 4.2������Ӳ��ԭ��D�O(sh��)Ӌ(j��)
4.2.1 ��Ƭ�C(j��)����ģ�K��Ƭ�C(j��)�x���(j��ng)���80C51����4��(g��)I/O�ڶ�Ҫ�õ��� P3�Ӳ��M(j��n)늙C(j��)�(q��)��(d��ng)�·��������B(t��i)�@ʾģ�K��P0��P2�քe�Ӳ���(sh��)�@ʾ�Ќ�(du��)��(sh��)�a�ܵ��ֶο��Ƽ���(sh��)�a��Ƭ�x��P1�ӹ�����B(t��i)�����·,���r(sh��)��Ã�(n��i)����ʽ����Ӿ��w��ʎ����Ӳ���D��D4��ʾ�� 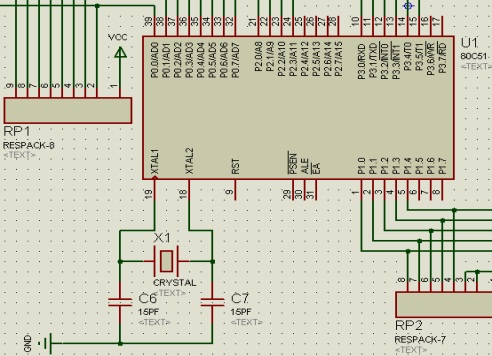
�D4 ��Ƭ�C(j��)ģ�Kԭ��D ���O(sh��)Ӌ(j��)�нӵ���12MHZ�ľ���һ��(g��)�C(j��)�����ڞ�1/12us������(j��)��(j��ng)�(y��n)��(sh��)��(j��)���c����һ��ăɂ�(g��)����O(sh��)��15PF����Ƭ�C(j��)��VCC��GROUD���[���ˣ����Ԅ�(d��ng)�Ӻã�VCC��(y��ng)�O(sh��)��+5V�� 4.2.2���I�x������B(t��i)ģ�K�����҂���(l��i)���]���ЙC(j��)е�|�c(di��n)ʽ���I�ڠ�B(t��i)ݔ���r(sh��)�Ĺ��Ԇ�(w��n)�}���ǰ��I����(d��ng)��(w��n)�}�����ڙC(j��)е�|�c(di��n)�ď������(d��ng)�����I�ڰ��r(sh��)����(hu��)�R�Ϸ�(w��n)���ؽ�ͨ���ڏ���r(sh��)Ҳ����һ������ȫ��?c��i)��_(k��i)������ڰ��I�]�Ϻ͔��_(k��i)��˲�g����(hu��)���F(xi��n)һ�B���Ķ���(d��ng)���@�Q(ch��ng)�鰴�I�Ķ���(d��ng)�ɔ_�� �@�N����(d��ng)���ܕ�(hu��)��ɰ�һ���I�a(ch��n)�����_(k��i)�P(gu��n)��B(t��i)��CPU�`�x�״Ρ�����ʹCPU�����_���xȡ���I��B(t��i)�������O(sh��)Ӌ(j��)���҂����ò�(li��n)�����������������ݵķ���ӕr(sh��)��(l��i)��(sh��)�F(xi��n)�� ��D5��ʾ���@��Ψһ��һ�Kݔ��ģ�K���O(sh��)Ӌ(j��)��5��(g��)���I�_(k��i)�P(gu��n)һ��ͨ�^(gu��)���Ӹ��ƽ����һ��ȫ���ӵ��أ����нӸ��ƽ��һ�ˌ�(du��)��(y��ng)Ҳ�ӵ���Ƭ�C(j��)��P1�ڷքe��P1.0~P1.4����(d��ng)�_(k��i)�P(gu��n)���_(k��i)������ݔ�뵽��Ƭ�C(j��)��(du��)��(y��ng)�˿ڸ��ƽ�����_(k��i)�P(gu��n)�]�ϣ���ʹ�˿ڽӵأ�ݔ����ƽ�������@��(g��)�O(sh��)Ӌ(j��)���_(k��i)�P(gu��n)���_(k��i)�r(sh��)������Ч�ġ������I���ܣ� ��1��K0-K2�鹤��ģʽ�����_(k��i)�P(gu��n)��KO��늕r(sh��)���鲽�M(j��n)늙C(j��)�����Ĺ���ģʽ��K1��늕r(sh��)���鲽�M(j��n)늙C(j��)�p���Ĺ���ģʽ��K2��늕r(sh��)�����M(j��n)늙C(j��)����ģʽ���������ġ� ��2��K3�醢/ͣ�����_(k��i)�P(gu��n)����������(g��)ϵ�y(t��ng)���_(k��i)�����P(gu��n)�]�� ��3��K4����/���D(zhu��n)�����_(k��i)�P(gu��n)�����Ʋ��M(j��n)늙C(j��)���D(zhu��n)��
�D5 ���Iģ�Kԭ��D 4.2.3���M(j��n)늙C(j��)����ģ�K�����ಽ�M(j��n)늙C(j��)����(g��)�˿�ֱ�ӽӵ���Ƭ�C(j��)P3.0~P3.2���ɣ�������(g��)�˿ڽӵ�+12V�ĸ��ƽ�o���M(j��n)늙C(j��)��늡�ֻ����ܛ������(xi��)�Ͽ����㷨������{(di��o)��(ji��)�@����(g��)�˿ڵĸߵ��ƽ��(l��i)���Ʋ��M(j��n)늙C(j��)���_(k��i)���cֹͣ�������D(zhu��n)�Լ�����ģʽ�����M(j��n)늙C(j��)Ӳ���Ӿ��D��D6��ʾ�� 
�D6 ���M(j��n)늙C(j��)ģ�Kԭ��D 4.2.4������B(t��i)�@ʾģ�KLED�l(f��)����O���@ʾ���M(j��n)늙C(j��)�Ĺ�����B(t��i)�������քe�ӵ���Ƭ�C(j��)��P3.3~P3.5����D7����Ƭ�C(j��)ݔ��ͨ�^(gu��)һ��(g��)�������ٽӵ�LEDꎘO��LED�(y��ng)�O��VCC���@�ӿ����������������ڶ��O�ܵČ�(d��o)ͨ���҂�����ͨ�^(gu��)����P3�ڵĔ�(sh��)��(j��)����(sh��)�F(xi��n)LED�����硣 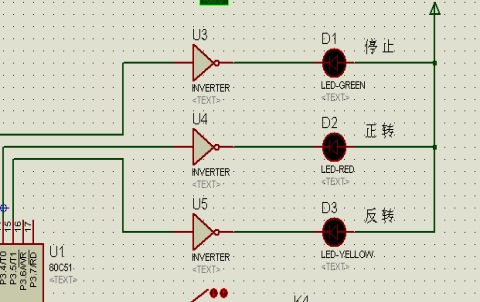
�D7 ������B(t��i)�@ʾģ�Kԭ��D 4.2.5 4λ��(sh��)�a���@ʾ����(sh��)ģ�KLED��(sh��)�a�܌�(sh��)�H�������߂�(g��)�l(f��)��ܽM��8���Θ�(g��u)�ɵģ�����С��(sh��)�c(di��n)����8��(g��)���@Щ�ηքe����ĸa,b,c,d,e,f,g,dp��(l��i)��ʾ����(d��ng)��(sh��)�a���ض��Ķμ���늉����@Щ�ض��Ķξ͕�(hu��)�l(f��)�������γ��҂��۾��������֘��ˡ�ͨ�^(gu��)�֕r(sh��)݆�����Ƹ���(g��)LED��(sh��)�a�ܵ�COM�ˣ���ʹ����(g��)��(sh��)�a��݆���ܿ��@ʾ���@���DŽ�(d��ng)�B(t��i)�(q��)��(d��ng)�� P0�ں�P2�ڵ�ǰ�Ă�(g��)�քe�Ӳ���(sh��)�@ʾ�Ќ�(du��)��(sh��)�a�ܵ��ֶο��Ƽ���(sh��)�a��Ƭ�x����D8��ʾ���@����Ҫ����ܛ���㷨��(l��i)��(sh��)�F(xi��n)��Ƭ�C(j��)ݔ���Ŀ��ơ�
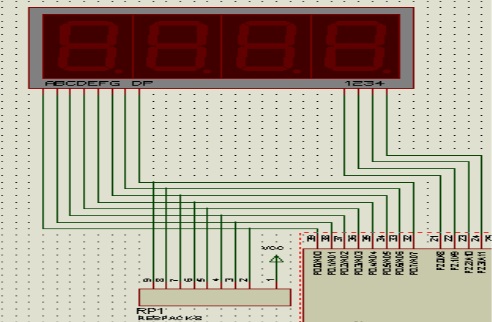
�D8 ��(sh��)�a���@ʾģ�Kԭ��D
5ܛ���O(sh��)Ӌ(j��)5.1ϵ�y(t��ng)���w�O(sh��)Ӌ(j��)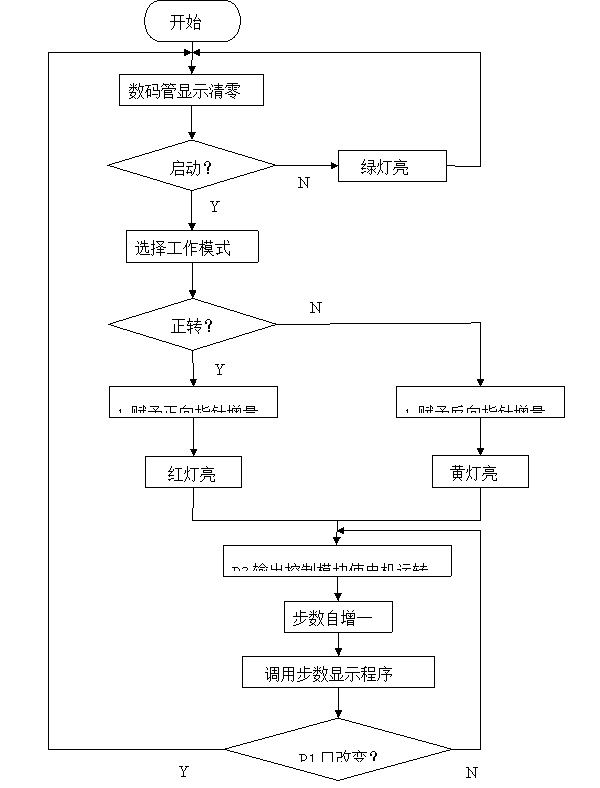
�D9 ϵ�y(t��ng)�����̈D �O(sh��)Ӌ(j��)�f(shu��)���������ǔ�(sh��)�a���@ʾ���㣬��Ƭ�C(j��)���x��P1��ݔ��İ��I��B(t��i)�����Д��Ƿ�(d��ng)������](m��i)�І���(d��ng)�t�ǾG���������Д࣬�������(d��ng)�ˣ��ͽ����Д������늙C(j��)����ģʽ�����x��P1�ڠ�B(t��i)�Д�늙C(j��)���D(zhu��n)��ݔ��������̖(h��o)�����D(zhu��n)�t���������D(zhu��n)�S�������ɴ˿������M(j��n)늙C(j��)����ָ���ķ�ʽ�\(y��n)�D(zhu��n)��������Ӌ(j��)����(sh��)���@ʾ����(sh��)�a���ϡ����z�(y��n)P1���Ƿ��B(t��i)��׃�������׃�t����(sh��)���������_(k��i)ʼ�Д࣬����׃�t�^�m(x��)�D(zhu��n)��(d��ng)�� 5.2���M(j��n)늙C(j��)����ģ�K
5.2.1���M(j��n)늙C(j��)�Ĺ�����ʽ�f(shu��)����1�����������Ĺ�����ʽ ���@�N������ʽ��,A��B��C����݆��ͨ�,����ГQ����,�ň�(ch��ng)���D(zhu��n)һ��,�D(zhu��n)����ǰ�D(zhu��n)�^(gu��)һ��(g��)�X��ǡ�����@�Nͨ늷�ʽ�������������Ĺ�����ʽ���@�r(sh��)����� (��)�飺 (��)�飺
 ʽ��:m������������(sh��); z �����D(zhu��n)���X��(sh��) ��1 �����ĵ���λ����
��2�������p���Ĺ�����ʽ �@�N������ʽÿ�ζ����Ѓ�����(d��o)ͨ,�����@�M̎����ͬ늉�֮��,��AB��BC��CA��AB (��֮)��ʽͨ�,�ʷQ(ch��ng)���p���Ĺ�����ʽ�����@�N��ʽͨ�,�D(zhu��n)���X��̎��λ���ஔ(d��ng)�����Ŀ��Ʒ�ʽ��ȥ������ĺ������(g��)λ�á����IJ����Ӌ(j��)�㹫ʽ�c�����ĕr(sh��)�Ĺ�ʽ��ͬ��
��2 �p���ĵ���λ���� ��3���������Ĺ�����ʽ ���@�N������ʽ��,�@�M��A��AB��B��BC��C��CA��A�r(sh��)��(�r(sh��)��)�D(zhu��n)�Q6��,�ň�(ch��ng)���D(zhu��n)һ��,�D(zhu��n)��ǰ�M(j��n)һ��(g��)�X��,ÿ���ГQ��ʹ�D(zhu��n)���D(zhu��n)��(d��ng)1. 5��,���@�Nͨ늷�ʽ�Q(ch��ng)���������ع�����ʽ���䲽��� �飺 �飺
 ��3 ���ĵĔ�(sh��)�W(xu��)ģ��
5.2.2�O(sh��)Ӌ(j��)�f(shu��)�������̈D�O(sh��)Ӌ(j��)�f(shu��)�����ڴ��O(sh��)Ӌ(j��)�У����õ������ಽ�M(j��n)늙C(j��)����(du��)�ڲ��M(j��n)늙C(j��)ģ�K�ij����O(sh��)Ӌ(j��)����ѭ�h(hu��n)�����O(sh��)Ӌ(j��)�������Ȱ������D(zhu��n)��Ŀ���ģ�ʹ���ڃ�(n��i)���Ԫ�У�Ȼ������һ�Ć�Ԫ��ȡ������ģ�K��ݔ�������Ȇ���(d��ng)��ͨ�^(gu��)P1���x������Ĺ�����ʽ�����x���M(j��n)늙C(j��)���Ĕ�(sh��)��Ȼ���x�������D(zhu��n)�Ŀ��ƣ��ف�(l��i)ݔ����(du��)��(y��ng)�Ŀ���ģ�́�(l��i)�(q��)��(d��ng)���M(j��n)늙C(j��)�D(zhu��n)��(d��ng)�� 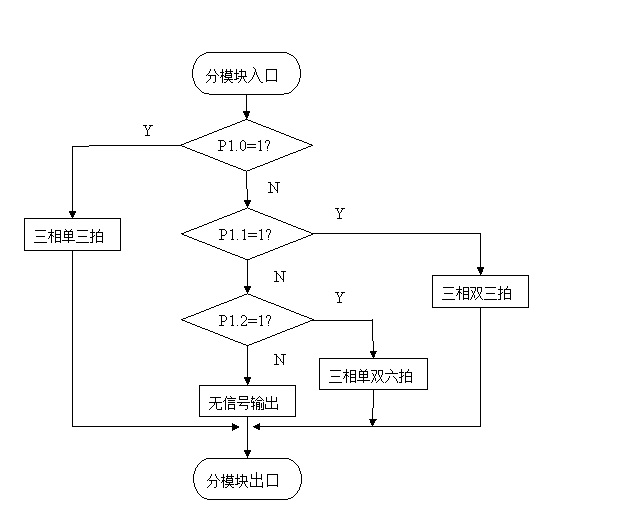 ���ಽ�M(j��n)늙C(j��)���������̈D�� ���ಽ�M(j��n)늙C(j��)���������̈D��
�D10 ���ಽ�M(j��n)늙C(j��)�������̈D 5.3��(sh��)�a�ܲ���(sh��)�@ʾģ�K�O(sh��)Ӌ(j��)�f(shu��)��������(sh��)�@ʾģ�K������(g��)�������һ��(g��)�ӳ���������4λ�˶Δ�(sh��)�a�܁�(l��i)�@ʾ��������(sh��)���Ȍ�Ҫ�@ʾ�Ĕ�(sh��)����10�M(j��n)�Ɣ�(sh��)��ÿλ�քe��(ch��)�棬��P0��ݔ���@ʾ�a��P2��ݔ��λ�x�a����Ҫһ�����ӕr(sh��)����λ��(sh��)���@ʾ�W�q����(l��i)��Ȼ���Ĕ�(sh��)�M��ַ������һλλ�x�a�^�m(x��)�@ʾ��ֱ��ݔ����λ��(sh��)���@��(g��)�����^(gu��)���؏�(f��)50�Σ����C�������^�쵽����(sh��)�@ʾ�� ���̈D��D11��
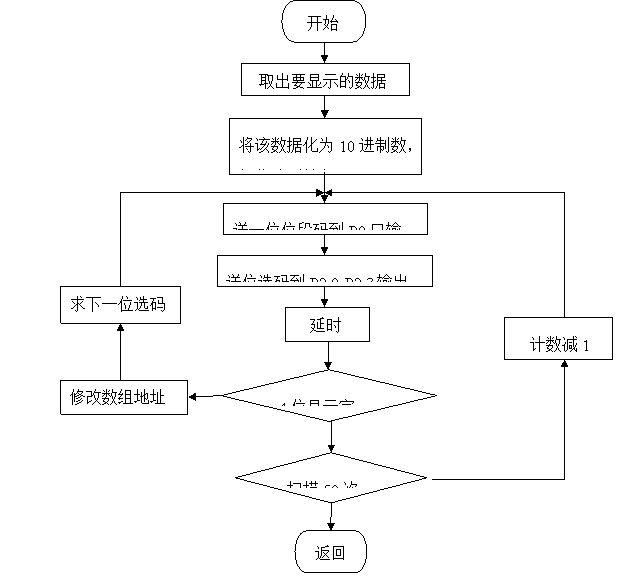
�D11 ��(sh��)�a���@ʾģ�K���̈D
6�����{(di��o)ԇӛ���D12��ʾ����(d��ng)�x��늙C(j��)�����چ����ģ����D(zhu��n)��ģʽ�£�K0���_(k��i)��K1��K2��K4���]�ϣ�ϵ�y(t��ng)����(d��ng)��K3���_(k��i)��늙C(j��)�_(k��i)ʼ�D(zhu��n)��(d��ng)��LED��λ�@ʾ���@ʾ��������(sh��)��LEDָʾ���S�����@ʾ늙C(j��)���D(zhu��n)�Ġ�B(t��i)�� 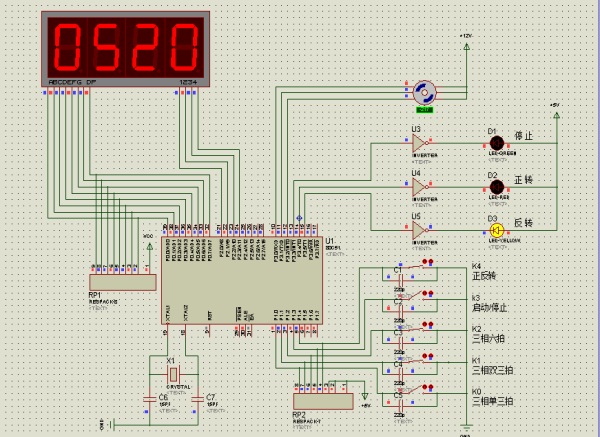
�D12 ����D ��D13��ʾ���˷N������ʽ�²��M(j��n)늙C(j��)�����D(zhu��n)�Ƕȣ�  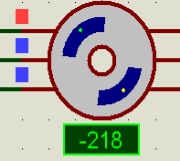 
�D13 ���M(j��n)늙C(j��)���D(zhu��n)�Ƕ� 7�ĵ��w��(hu��)�����n�O(sh��)����һ�ܣ����ԕr(sh��)�g���^�o�����o�n�O(sh��)���������������y�ȡ���Ƭ�C(j��)ԭ����һ�T(m��n)��(y��ng)���Ժ�(qi��ng)�C���Ժ�(qi��ng)�ČW(xu��)�ƣ����@���n�O(sh��)�У��ҳ�ָ��ܵ����@һ�c(di��n)�����ώ��o���n�}֮�У��ǁ�(l��i)���ڸ���(g��)�������(g��)�I(l��ng)��đ�(y��ng)�ã����ò��f(shu��)��Ӌ(j��)��C(j��)���ƺ�(qi��ng)�_��(sh��)��׃���҂������ �n�O(sh��)�������y�IJ��־��Ǿ���(xi��)����ͷ����{(di��o)ԇ��Ҳ�SӲ���B�ӛ](m��i)��(w��n)�}�������\(y��n)�Л](m��i)��(w��n)�}�����ǣ���(d��ng)�ѳ���?q��)��룬�l(f��)�F(xi��n)늄�(d��ng)�C(j��)���Dz��D(zhu��n)�������Dz�������(sh��)�a�ܾ��ǁy�����@�Ǻܿ��(y��n)?z��i)��ĵĕr(sh��)��һ��һ���ȥ�{(di��o)ԇ�������B�Ӳ��֣��Еr(sh��)��Ŀ����ܱ��������Ǯ�(d��ng)�㲻�ŗ����{(di��o)ԇ�����з���ɹ��Ŀ���,���@�N����(f��)�У���(du��)�҂���������������ߺܶ�ġ���һ��(g��)�ի@�����P(gu��n)��ܛ����ʹ���ˡ�PROTEUS,KEIL51,��ǰ����Ҳ���^(gu��)������ƽ�r(sh��)�^�ٽ��|���@�ε��n�O(sh��)�ұ��^�쾚���������@�ɂ�(g��)�W(xu��)��(x��)ܛ����(qi��ng)��Ĺ��ܣ����Ұl(f��)�F(xi��n)��PROTEUS�(d��o)����(l��i)���·�D�eƯ���������� ��Ƭ�C(j��)ԭ��һֱ���Լ����^ϲ�g��һ�T(m��n)�W(xu��)�ƣ��õ��n���O(sh��)Ӌ(j��)���}ĿҲ�������ԺúÙz�(y��n)�Լ��ČW(xu��)��(x��)�ɹ���һֱ�J(r��n)�飬��ĩ��ԇ�����^�đ�(y��ng)ԇ���������n���O(sh��)Ӌ(j��)�ƺ����ӵؿ��(y��n)���W(xu��)��֪�R(sh��)�����^��(sh��)�`�c��Փ��Y(ji��)�Ͼ����@��(g��)�����ɡ��n���O(sh��)Ӌ(j��)��������һ�N��վ��ɽ��ǰ�ĸ��X(ju��)������ȥ���^İ���ߴ����ʵǵļ���������ƽ�r(sh��)�ČW(xu��)��(x��)����(x��)�ã������ȥ�ʵǣ�������ڻ�ζ�n�����ώ��v�Ė|������(sh��)���ϵĖ|�����@��һ�N������w�(y��n)�� �������������·�����n�}����һ�������֪�R(sh��)����֮��(n��i)�����挦(du��)�µĖ|�����҂�Ҫ���o��ȥ�����Q֮����ȥ�ь��W(w��ng)�j(lu��)�YԴ���D��(sh��)�^�YԴ�Լ���ͬ�W(xu��)����ӑՓ֮�У��ٽY(ji��)���Լ����W(xu��)�^(gu��)��֪�R(sh��)��(l��i)��������Щδ֪�Ė|�����U(ku��)��֪�R(sh��)�棬�@�Ӿ͕�(hu��)�X(ju��)�ÌW(xu��)�����h(yu��n)�h(yu��n)���^(gu��)�n�õĖ|�������DžsԴ���n�ã�����@�����n�O(sh��)�����x�ɣ������ի@��
��Ƭ�C(j��)Դ�a:
- #include<reg51.h>
- #include<stdio.h>
- void delay1(void);
- void delay2(void);
- void display(int);
- int bs=0;
- main()
- { char a,b,c,d,j,*q,
- done1[8]={0x01,0x02,0x04,0x00,0x01,0x04,0x02,0x00},
- done2[8]={0x03,0x06,0x05,0x00,0x03,0x05,0x06,0x00}, done3[14]={0x01,0x03,0x02,0x06,0x04,0x05,0x00,0x01,0x05,0x04,0x06,0x02,0x03,0x00};
- L: a=P1;
- while(!(a&0x08)) //�Д��Ƿ�(d��ng)�����](m��i)����(d��ng)�t�����Д�
- { P3=0x08;
- delay1();
- a=P1; }
- //...............................................�Д��ģʽ
- if(a&0x01) //��ʽ1ģ��
- q=done1;
- else if(a&0x02) //��ʽ2ģ��
- q=done2;
- else if(a&0x04) //��ʽ3ģ��
- q=done3;
- //...............................................�Д�늙C(j��)�D(zhu��n)��
- if(a&0x10) //�Д�늙C(j��)�Ƿ�Ҫ���D(zhu��n)
- { P3=0x10; //P1.4�ڞ�1��늙C(j��)���D(zhu��n)���t����
- b=0;}
- else
- { P3=0x20; //P1.4�ڞ�0��늙C(j��)���D(zhu��n)���S����
- if(a&0x04)b=7; //���D(zhu��n)�r(sh��)��b�Ô�(sh��)��ʹָ�ָ����(sh��)�M������
- else b=4; }
- //....................................................
- d=b;
- while(1)
- { c=*(q+b); //�Д�늙C(j��)����(sh��)�Ƿ�����
- if(c==0)b=d; //����(sh��)���꣬늙C(j��)��������
- else
- { P3=c; //��P3ݔ��늙C(j��)������̖(h��o)
- b++;
- bs++; //������(sh��)��1
- display(bs); //�@ʾ����(sh��)
- j=a;
- a=P1;
- if(a!=j) //�Д�P1�ڠ�B(t��i)��̖(h��o)�Ƿ��׃
- { if(!(a&0x08))bs=0; //����ֹͣ��̖(h��o)��������(sh��)����
- goto L; } //��B(t��i)��̖(h��o)��׃�����ص��_(k��i)ʼ������(du��)늙C(j��)����
- }
- }
- }
- void delay1() //�ӕr(sh��)5ms�ӳ���
- { int i,j;
- for(i=0;i<200;i++)
- for(j=0;j<300;j++);
- }
- void delay2() //�ӕr(sh��)50us�ӳ���
- { int i,j;
- for(i=0;i<10;i++)
- for(j=0;j<60;j++);
- }
- void display(int n)
- {unsigned char tab[10]={0x3f,0x06,0x5b,0x4f,0x66,0x6d,0x7d,0x07,0x7f,0x67};
- unsigned char i,k,t,num[4];
- num[0]=n%10; //��������(sh��)�ĸ�λ�քe����num��(sh��)�M��
- num[1]=(n/10)%10;
- num[2]=(n/100)%10;
- num[3]=(n/1000)%10;
- for(t=0;t<50;t++) //����50��
- { k=0x08; //λ�x�aָ������һλ,����λ
- for(i=0;i<4;i++)
- { P2=k; //��P2��ݔ��λ�x�a
- P0=~(tab[num[i]]); //ȡ���@ʾ�a������P0��ݔ���@ʾ�a
- k=k>>1; //����һ��(g��)λ�x�a
- delay2();
- }
- }
- }
 ���چ�Ƭ�C(j��)�����ಽ�M(j��n)늙C(j��)����ϵ�y(t��ng)�O(sh��)Ӌ(j��)�ֽ�.doc
(759.01 KB, ���d��(sh��): 76)
���چ�Ƭ�C(j��)�����ಽ�M(j��n)늙C(j��)����ϵ�y(t��ng)�O(sh��)Ӌ(j��)�ֽ�.doc
(759.01 KB, ���d��(sh��): 76)
2019-1-9 18:47 �ς�
�c(di��n)���ļ������d����
| 

 ����TQQ:125739409;���g(sh��)����QQȺ281945664
����TQQ:125739409;���g(sh��)����QQȺ281945664



