ժҪ
���O(sh��)Ӌ����51��Ƭ�C(j��)�����b�ذl(f��)�����оƬ��HS003B����t��һ�w�����հl(f��)��ܣ��ڴ˻��A(ch��)���O(sh��)Ӌ��һ���������ܼt���b��ϵ�y(t��ng)��ϵ�y(t��ng)�������պͰl(f��)��ɴ֣��l(f��)�䲿����16�����I�����ղ��ֺ���8�K��ɫLED����һƬ��λ��(sh��)�a�ܺͷ��Q��ϵ�y(t��ng)���l(f��)�䲿��ͨ�^�I�P�����Д��Ă��I�����£���(j��ng)�^��Ƭ�C(j��)���a�����M(j��n)�о��a�����Ƽt��l(f��)���·�l(f��)����̖�����ղ��ֽ�a��̖����(sh��)�F(xi��n)����(y��ng)��ݔ�������O(sh��)Ӌ�����Y(ji��)�ϼt���b���O(sh��)Ӌ���Ρ������㡢�ɱ����������c(di��n)��
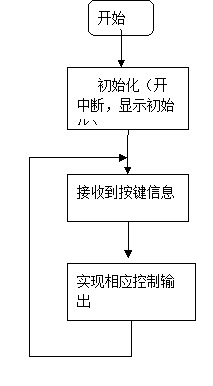
1 �wՓ 1.1�n�}Ŀ�ĺ����x �S���Ƽ��İl(f��)չ���˂�����Ĺ�(ji��)��ҲԽ��Խ�죬�S֮�˂������㣬��ݵ�Ҫ��Ҳ�S֮�������ߡ��b�����ij��F(xi��n)����һ���̶��ϝM�����˂��@��Ҫ���b�������ɸ߮a(ch��n)�İl(f��)����Robert Adler����ʮ����l(f��)����[1]�����t���b����20���o(j��)70������_ʼ�l(f��)չ������һ�N�h(yu��n)�̿��Ƽ��g(sh��)����ԭ�������üt�⾀����f������̖����(sh��)�F(xi��n)�����ƌ�����h(yu��n)���x���ƣ����w���v�������аl(f��)�����l(f��)���t�⾀ָ����̖���н�����������������̖�M(j��n)��̎�������(sh��)�F(xi��n)�����ƌ���ĸ��N���ܵ��h(yu��n)�̿��ơ� �t���b�ؾ��Ъ�(d��)���ԡ����������c��Ҋ�������ԡ��o���ϵK����������^��(qi��ng)���[���Ե����c(di��n)���S���t���b�ؼ��g(sh��)���_�l(f��)��Ѹ�ٰl(f��)չ���ܶ��������ԓ�(xi��ng)���g(sh��)��ʹ�˂���������ӱ�ݡ���С�Mͨ�^�t���b�ؼ��g(sh��)�����ƶ�K�ʟ���������r����(sh��)�F(xi��n)���N�����Լ���(sh��)�a�ܵĔ�(sh��)ֵ�@ʾ��ͨ�^���n�}���O(sh��)Ӌ�����õ�����t�⾀�ľ��a��a��ʽ����t���b��ϵ�y(t��ng)����������ԭ����
1.2�t�⾀�����t�⾀�ַQ�t��Ⲩ����늴Ų��V�У��Ⲩ�IJ��L������0.01um~1000um������(j��)���L�IJ�ͬ�ɷ֞��Ҋ��Ͳ���Ҋ�⣬���L��0.38um~0.76um�ĹⲨ�ɞ��Ҋ�⣬���Ξ�t���ȡ��S���G���ࡢ�{(l��n)�����߷N�ɫ���Ⲩ��0.01um~0.38um�ĹⲨ�������(��)�����L��0.76um~1000um�ĹⲨ��t���(��)���t��ⰴ���L�����֞���t�⡢�мt�⡢�h(yu��n)�t�⡢�O�t��4��t�⾀�b�������ý��t�������b��ָ��ģ����L��0.76um~1.5um���ý��t�������b�ع�Դ������?y��n)�Ŀǰ�t��l(f��)������(�t��l(f��)���)�c�t���������(�������O�ܡ����O�ܼ���늳�)�İl(f��)���c�ܹ��ֵ���Lһ���0.8um~0.94um���ڽ��t��Ⲩ��(n��i)�����ߵĹ��V�����غϣ��܉�ܺõ�ƥ�䣬���ԫ@���^�ߵĂ�ݔЧ�ʼ��^�ߵĿɿ��ԡ� 1.3�t���b��ϵ�y(t��ng)�����t���b��ϵ�y(t��ng)��Ҫ���b�ذl(f��)������һ�w�������^����Ƭ�C(j��)���ӿ��·�M�ɣ��b�����Á��a(ch��n)���b�ؾ��a�}�_���(q��)�Ӽt��l(f��)���ݔ���t���b����̖���b�ؽ����^��Ɍ��b����̖�ķŴz�������Ρ����{(di��o)���b�ؾ��a�}�_���b�ؾ��a�}�_��һ�M���ж��M(j��n)�ƴa������һ��ļt���b��ϵ�y(t��ng)���˴��дaݔ�뵽�������������(n��i)��CPU��Ɍ��b��ָ���a������(zh��)������(y��ng)���b�ع��ܡ�ʹ���b�����������ϵ�y(t��ng)��ݔ�룬��Ҫ��Q���ׂ��P(gu��n)�I���}����ν��ռt���b����̖������R�e�t���b����̖�Լ���aܛ�����O(sh��)Ӌ�����Ƴ�����O(sh��)Ӌ�� �t���b���džι��ļt��ͨ�ŷ�ʽ������ͨ���У���Ҫһ���l(f��)��˺�һ�����նˡ��l(f��)�Ͷ˲��Æ�Ƭ�C(j��)�����l(f��)�͵Ķ��M(j��n)����̖���a�{(di��o)�ƞ�һϵ�е��}�_����̖��ͨ�^�t��l(f��)��ܰl(f��)��t����̖���t����ն��ձ���Ãr����ˣ����ܿɿ���һ�w���t������^���ռt����̖����ͬ�r����̖�M(j��n)�зŴz�������Σ��õ�TTL��
2 �n�}�������O(sh��)Ӌ˼· 2.1���w���� �t���b��ϵ�y(t��ng)һ���ɼt��l(f��)���b�úͼt������O(sh��)��ɴֽM�ɣ��D2-1����ʾ��Y(ji��)��(g��u)��D�� �D2-1 ϵ�y(t��ng)�Y(ji��)��(g��u)��D �t��l(f��)���b�������I�P�·���t�⾎�aоƬ���Դ�ͼt��l(f��)���·�M�ɡ��t������O(sh��)����ɼt������·���t���aоƬ���Դ�͑�(y��ng)���·�M�ɡ� 2.2�t��l(f��)�����O(sh��)Ӌ2.2.1�t��l(f��)����ԭ������ָ�(sh��)��(j��)�r�g�����^�L����̖�l�ʺܵͣ�ֱ�Ӱl(f��)�����Ч�ʺ;��x���ޣ����ɔ_�Բ��ˣ���횲��ö����{(di��o)�Ʒ�ʽ����ָ�(sh��)��(j��)ͨ�^�d����̖�M(j��n)���{(di��o)�ƣ��γ��^���l�ʵď�(f��)����̖����ͨ�^�t��l(f��)����O�ܮa(ch��n)���t�⾀�l(f��)���ȥ��
�D2-2 �t���b�ذl(f��)��ԭ����D 2.2.2�t�⾎�a�t�⾎�a�кܶ�N��ʽ�����n�}�����}�_�����{(di��o)�Ʒ������@�N�b�شa�������������� ���}����0.565ms���g��0.56ms�����ڞ�1.125ms�ĽM�ϱ�ʾ���M(j��n)�Ƶġ�0�������}����0.565ms���g��1.685ms�����ڞ�2.25ms�ĽM�ϱ�ʾ���M(j��n)�Ƶġ�1���� �������D�� �D2-3 λ��0����λ��1�����ΈD �ڴ˽�B�^�ձ�ʹ�õ�NEG��(bi��o)��(zh��n)���䔵(sh��)��(j��)��ʽ��������(d��o)�a���Ñ��a����(sh��)��(j��)�a�͔�(sh��)��(j��)���a�����a��ռ32λ����(sh��)��(j��)���a�ǔ�(sh��)��(j��)�a�����ľ��a�����a���ڌ���(sh��)��(j��)�ļm�e��
2.3�t����ն��O(sh��)Ӌ���ն���Ҫ�����t�����ģ�K�ͽ��{(di��o)��Ƭ�C(j��)�����У��t�⾀����ģ�K��������D(zhu��n)�Q�Ŵ����ͽ��{(di��o)�·����(d��ng)�t�⾀�l(f��)����̖�M(j��n)��ģ�K������ݔ���˵õ�ԭ�ȵĔ�(sh��)�ֿ��ƾ��a���ٽ�(j��ng)�^��Ƭ�C(j��)��a�����M(j��n)�н�a����֪�����ǂ��I����(sh��)�F(xi��n)����(y��ng)ݔ����P0.0�B�ӷ��Q��ϵ�y(t��ng)��ÿ�ɹ����յ���̖�����Q���l(f��)��һ���P1���B��8�K�ʟ������Ք�(sh��)��(j��)��ͬ�ʟ��Ļ�ɫ��ͬ��P2�ڡ�P3.0��P3.1�B��һƬ��λ��(sh��)�ܣ���(sh��)�a���@ʾ��01��16�Ĕ�(sh��)ֵ���քe����(y��ng)�l(f��)�䲿�ֵ�16�����I�� 3Ӳ���Y(ji��)��(g��u)�O(sh��)Ӌ�c��B 3.2 �t��l(f��)���·���b�ذl(f��)���������}�_�����{(di��o)�Ƽt���b�ط�ʽ���}�_�����{(di��o)�Ƽt���b�ؾ���ָ����̖�a(ch��n)���·�Բ�ͬ���}�_���a������ͬ�Ŀ���ָ� �ڴ_���x��AT89C51���鱾�O(sh��)Ӌ�l(f��)���·����оƬ���c(di��n)�|ʽ�_�P(gu��n)��������I����һ�����μt��l(f��)���·��12M���w��ʎ����Ɍ�(sh��)�F(xi��n)�t��l(f��)�䡣 �l(f��)�䲿�ֵ���ҪԪ����t��l(f��)����O�ܡ�����(sh��)�H����һֻ����İl(f��)����O�ܣ��������(n��i)�����ϲ�ͬ����ͨ�l(f��)����O�ܣ��������ɶ�ʩ��һ��늉��r�����l(f��)���ı��Ǽt�⾀�����ǿ�Ҋ�⡣Ŀǰ����ʹ�õļt��l(f��)����O�ܰl(f��)���ļt�⾀���L��940nm���ң������c��ͨ��5�l(f��)����O����ͬ��ֻ���ɫ��ͬ[6]�� �b�ذl(f��)��ͨ�^�I�P��ÿ����һ���I�����a(ch��n)�����в�ͬ�ľ��a��(sh��)���}�_���@�N���aָ����̖�{(di��o)����38KHz���d���ϣ�����t�����O�ܮa(ch��n)����ͬ���}�_��ͨ�^���g�Ă��͵��ؙܿC(j��)���b�ؽ�������P1�����鰴�I���֣�P3.6������l(f��)�䲿�֡� ��(d��)��ʽ�I�P�ɹ����ڲ�ԃ��ʽ�£�ͨ�^I/O���x���I��B(t��i)����(d��ng)���I�����rI/O��׃?y��u)���ƽ����δ�����µ��I����(y��ng)����ƽ���@��ͨ�^�x�ƽ��B(t��i)���Д��Ƿ����I���º��Ă��I�����¡� 
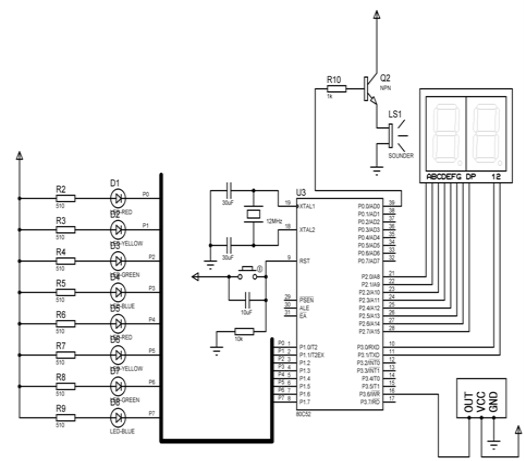
�D3-2 �t��l(f��)����· 3.3�t������·�O(sh��)Ӌ3.3.1 �t�����ģ�KHS003B��һ�N��Ҋ�ļt�����ģ�K���t�����ģ�K��(n��i)�����и��l�ĞV���·�����T�Á�V���t��ϳ���̖���d����̖��38KHz�������ͳ����յ�����̖��ģ �K��3�����_�����_1��GND����ӵضˣ����_2��VCC������Դ���O�����_3 ��OUT���锵(sh��)����̖ݔ���ˡ� 3.3.2��(sh��)�a��
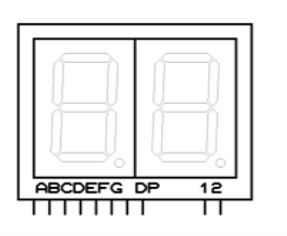
��3-1 �߶�LED���δa
�D3-4 ��λ��(sh��)�a���@ʾ�� �O(sh��)Ӌ���õ���̖��7SEG-MAX2-CA-BLUE�Ķ�λ��ꖘO��(sh��)�a���@ʾ������������(c��)��ABCDEFG DP��LED��(sh��)�a���@ʾ����I/O�ڣ��Ƕ��x��̖������(c��)��12������λ�x��̖�����Ǐ����ҷքe�ǵ�һλ���ڶ�λ�����x��̖�cλ�x��̖�քe�ӵ���Ƭ�C(j��)�IJ�ͬݔ���ڣ�������x��̖���Խӵ�P2�ڣ�λ�x��̖���Խӵ�P3.0�ں�P3.1�ڣ���ꖘO�������@ʾ���a��:unsigned char[]={0xc0, 0xf9,0xa4,0xb0,0x99,0x92,0x82,0xf8,0x80,0x90},P3.0ݔ����0��P3.1ݔ����1�r���x�еڶ�λ�����x��̖�͈�(zh��)�Џ�0��9���@ʾ��P3.0ݔ����1��P3.1ݔ����0�r���x�е�һλ�����x��̖�͈�(zh��)�Џ�0��9���@ʾ�� 3.3.3 �ʟ�ϵ�y(t��ng)P1���B��8�K�ʟ���P1.0��P1.4�B�ӵ���LED-RED��P1.1��P1.5�B�ӵ���LED-YELLOW��P1.2��P1.6�B�ӵ���LED-GREEN��P1.3��P1.7�B�ӵ���LED-BLUE������(j��)���յ�����̖�@ʾ��ͬ�Ļ��͡� 
�D3-5 �ʟ�ϵ�y(t��ng)�B�ӈD 3.3.4���Q��ϵ�y(t��ng) P0.0�B�ӷ��Q��ϵ�y(t��ng)��ÿ�ɹ����յ���̖�����Q���l(f��)��һ��� �D3-6 ���Q��ϵ�y(t��ng)�B�ӈD 3.3.5�t����ն��·�D �D3-7 �t����ն��·�D 4 ܛ���O(sh��)Ӌ 4.1 ���r/Ӌ��(sh��)�����ܺ���AT89C51��Ƭ�C(j��)��(n��i)���O(sh��)�Ѓɂ�16λ�ɾ��̵Ķ��r/Ӌ��(sh��)�������Q���r��0�Ͷ��r��1���քe��T0��T1��ʾ���书��ͬһ�㶨�rӋ��(sh��)������Ҫ�����ǣ���һ������һ���ض��r�g�L�̵Ķ��r���ڶ�������Ӌ����T1��T0���_ݔ����}�_��(sh��)��ǰ���ڑ�(y��ng)���Ͽ��Ԯa(ch��n)�����_�ĕr�g���t�����rȥ��(zh��)���Д����(w��)�������߄t��Ӌ��(sh��)������Ӌ�l�����O(sh��)Ӌ�� �@�ɂ����r���������ķN����ģʽ�ɹ�ʹ�ã����2��ʾ�� ��4-1 �ķN����ģʽ | | | | | | | | | | | | | | ���r��0���ֳɃɂ�8λӋ��(sh��)�� ���r��1��ֹͣӋ��(sh��) |
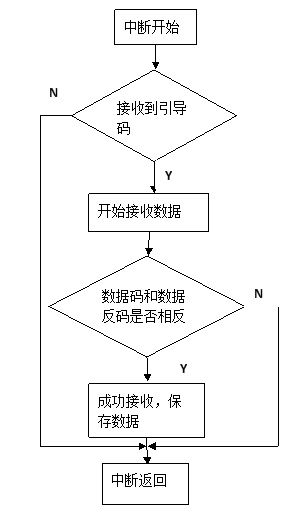
4.2 �b�شa�İl(f��)����(d��ng)ij���������I���r����Ƭ�C(j��)���x���Iֵ��Ȼ�����(j��)�Iֵ�O(sh��)���b�شa���}�_����(sh��)�����{(di��o)�Ƴ�38kHz�����ɼt�⾀�l(f��)��ܰl(f��)���ȥ[13]�� ͨ�����t���b���nj��b����̖�����M(j��n)���}�_�a���{(di��o)����38KHz���d���ϣ���(j��ng)���_�Ŵ�������t��l(f��)����O�ܣ��D(zhu��n)����t����̖�l(f��)���ȥ�ġ�������߿��ɔ_���ܺͽ����Դ���ģ����������b�ؾ��a�}�_���l�ʞ�38KHz�����ڞ�26us�����d����̖�M(j��n)���}���{(di��o)�ƣ�PAM�����ٽ�(j��ng)���_�Ŵ���͵��t��l(f��)��ܣ����b����̖�l(f��)���ȥ�� �t����̖�l(f��)���^��:���Ȱl(f��)��9ms���ƽ��4.5ms���ƽ������(d��o)�a���ٰl(f��)��16λ��ַ�a��ǰ8λ��16λ��ַ�a�ĺ�8λ��8λ���I��(sh��)��(j��)��8λ���I��(sh��)��(j��)���a�� �ڌ�(sh��)�`��,���üt�⾀�b�ط�ʽ�r,�������b�ؾ��x,�Ƕȵ�Ӱ�,ʹ��Ч�����Ǻܺ�,������{(di��o)�l���{(di��o)���l(f��)����մa,������b�ؾ��x,���қ]�нǶ�Ӱ푡� �l(f��)����Ƴ�������������I��������a�l(f��)�ͳ���M�ɣ����������У������I�����ӳ�����ɸ������I�Ĺ��ܣ��b�ذl(f��)������������̈D (a)�t��l(f��)�����������̈D ��b���t�┵(sh��)��(j��)�l(f��)���ӳ������̈D �D4-1�t��l(f��)��˳������̈D 4.3 �t������t���b�ؽ�a������Ҫ������ȴ��t�⾀��̖���F(xi��n)�������^����(d��o)��̖���Ѽ��B�m(x��)32λ�ľ��a��(sh��)��(j��)���������(n��i)����B�m(x��)���g����λ��̖�Єe��ԭ�t�ǣ����Д����λ�IJ�����̖��Q���ߵ���̖��0��1���� λ��aԭ�����£� - ��a��0�����ƽ����0.56ms+���ƽ����0.56ms��
- ��a��1�����ƽ����0.56ms+���ƽ����1.68ms��
���a��(sh��)��(j��)�xȡ��(j��ng)�^��Ƭ�C(j��)�����a��(sh��)��(j��)�c�I�P���a�M(j��n)�бȌ������ɽ��{(di��o)�����w�İ��Iֵ�����֪�����Ă��I������������(y��ng)�Ŀ���̎������ɼt���b�صĄ����� - �t��������������̈D ��b���t������Д��ӳ������̈D
�D4-2 �t����ն˳������̈D 5 �n���O(sh��)Ӌ���Y(ji��)���ĵ� �@���n���O(sh��)Ӌ������1�����ڵ���Ѫ����һ�_ʼ�Ĵ_���n�}����������Y�ϲ��ҡ���Փ�W(xu��)��(x��)�����о����{(di��o)ԇ�͜yԇ�^�̣��@һ�ж�ʹ�ҵ���Փ֪�R�̈́��������M(j��n)һ����ߡ� ͨ�^���μt��ϵ�y(t��ng)���O(sh��)Ӌ,�Ҵ����ի@���ĵõ��}Ŀ�������Y�ϣ���proteus������{(di��o)ԇ��ʧ������һ��ȫ�������_ʼ�������@һ����M����(zh��n)���S���ۣ���M������S������^���У��Ҹ��|�H����Ѳ��H��һ�����ҵČW(xu��)��(x��)֪�R��r���ҵđ�(y��ng)�Ä��������ęz�(y��n)������߀�nj��ҵ��@�о����挦���y���đB(t��i)�����µ����������ĵĿ��(y��n)�������@���^������̵ĸ��ܵ������n���O(sh��)Ӌ�����x���ڡ��@���n�}�ĸ������g(sh��)���dž�Ƭ�C(j��)���Ƽ��g(sh��)���Ӳ�������·�팍(sh��)�F(xi��n)һЩ��(f��)�s�Ĺ��ܡ����Ը���(j��)Ҫ���׃ܛ���팍(sh��)�F(xi��n)���ܵĸ��º͔U(ku��)չ�� ���n�}�����c(di��n)���y�c(di��n)�ǣ� ��1�� ���]�·��(sh��)�F(xi��n)ԭ���Լ��c��Ƭ�C(j��)�Ľӿڣ� ��2�� �t��l(f��)���c���ռ��g(sh��)�� ͨ�^��ɱ��n�}�����˽Ⲣ�����˼t���b�ؼ��g(sh��)�Ļ�����Փ֪�R������������Ն�Ƭ�C(j��)�ڌ�(sh��)�H�·�е��_�l(f��)�͑�(y��ng)�á����Ժ����Ƭ�C(j��)ܛӲ���a(ch��n)Ʒ���O(sh��)Ӌ�_�l(f��)������һ���Ļ��A(ch��)�����B(y��ng)�ˏ��®a(ch��n)Ʒ�аl(f��)�����ġ� 6 �����īI(xi��n) [1]��Ƭ�C(j��)ԭ���c��(y��ng)�ü�C51�����O(sh��)Ӌ���ľS�� ��Ӈ� ���������A��W(xu��)�����硣 [2] C�Z�Գ����O(sh��)Ӌ�������棩���T�Ə�(qi��ng) ���������A��W(xu��)�����硣 [3] ��Ƭ�C(j��)ϵ�y(t��ng)�O(sh��)Ӌ�c���桪����Proteus��Ф� ������ �������պ����W(xu��)�����硣 [4] DIY���D(zhu��n)51��Ƭ�C(j��)�� ������ ��������ӹ��I(y��)�����硣 [5] ��Ƭ�C(j��)��(c��)�ؼ��g(sh��)��(y��ng)�Ì�(sh��)�������� �S���� ��@�� ��� ����ϼ �������Ї���������硣 [6] ��Ƭ�C(j��)�ӿ�ģ�K��(y��ng)���c�_�l(f��)��(sh��)��Ԕ�⣬ ѦС�� ��־Ⱥ �Z���s ������ �� �����պ����W(xu��)������ ���1 Proteus����D 
���2 �l(f��)�����
#include <REG51.h>
#include <intrins.h>
#define uchar unsigned char
#define uint unsigned int
#define SBM 0x80
#define m9 (65536-9000)
#define m4_5 (65536-4500)
#define m1_6 (65536-1630)
#define m_65 (65536-580)
#define m_56 (65536-560)
#define m40 (65536-40000)
#define m56 (65536-56000)
#define m2_25 (65536-2250)
sbit IR = P3^6;
sbit LED = P3^7;
uchar KEY(void);
void SanZhuan(void);
void ZZ(uchar x);
void Z0(uchar temp);
void TT0(bit BT,uint x);
void YS(uchar time);
void main(void)
{ TMOD = 0x01;
IR=1;
while(1)
{SanZhuan();}
}
uchar KEY(void)
{uchar H,L;
H=0;
L=0;
P1 = 0xf0;
if(P1!= 0xf0)
{ YS(10);
if(P1!=0xf0)
{H = P1&0xf0;
P1 = 0x0f;
L = P1&0x0f;
}
return (H+L);
}
return 0;
}
void SanZhuan(void)
{ uchar v;
v = KEY();
switch(v)
{case 0x77:ZZ(0x01);v=0;break;
case 0xb7:ZZ(0x02);v=0;break;
case 0xd7:ZZ(0x03);v=0;break;
case 0xe7:ZZ(0x04);v=0;break;
case 0x7b:ZZ(0x05);v=0;break;
case 0xbb:ZZ(0x06);v=0;break;
case 0xdb:ZZ(0x07);v=0;break;
case 0xeb:ZZ(0x08);v=0;break;
case 0x7d:ZZ(0x09);v=0;break;
case 0xbd:ZZ(0x10);v=0;break;
case 0xdd:ZZ(0x11);v=0;break;
case 0xed:ZZ(0x12);v=0;break;
case 0x7e:ZZ(0x13);v=0;break;
case 0xbe:ZZ(0x14);v=0;break;
case 0xde:ZZ(0x15);v=0;break;
case 0xee:ZZ(0x16);v=0;break;
default:v=0;
}
}
void ZZ(uchar x)
{ TT0(1,m9);
TT0(0,m4_5);
Z0(SBM);
Z0(~SBM);
Z0(x);
Z0(~x);
TT0(1,m_65);
TT0(0,m40);
while(KEY())
{ TT0(1,m9);
TT0(0,m2_25);
TT0( 1,m_56);
TT0(0,m40);
TT0(0,m56);
LED = !LED;
}
LED = 1;
}
void Z0(uchar temp)
{ uchar v;
for (v=0;v<8;v++)
{ TT0(1,m_65);
if(temp&0x01) TT0(0,m1_6);
else TT0(0,m_56);
temp >>= 1;
}
}
void TT0(bit BT,uint x)
{
TH0 = x>>8;
TL0 = x;
TF0=0;
TR0=1;
if(BT == 0) while(!TF0);
else while(1)
{
IR = 0;
if(TF0)break;
if(TF0)break;
IR = 1;
if(TF0)break;
if(TF0)break;
if(TF0)break;
if(TF0)break;
if(TF0)break;
if(TF0)break;
if(TF0)break;
if(TF0)break;
if(TF0)break;
if(TF0)break;
}
TR0=0;
TF0=0;
IR =1;
}
void YS(uchar time)
{ uchar i,j;
for(i=0; i<time; i++)
for(j=0; j<247; j++)_nop_();
}
���3 ���ճ���
#include<reg51.h>
sbit IRIN=P3^2;
sbit SPK=P0^0;
sbit RELAY=P2^7;
sbit P3_0=P3^0;
sbit P3_1=P3^1;
unsigned char IRDATA[7];
unsigned char tab[]= {0xc0,0xf9,0xa4,0xb0,0x99,0x92,0x82,0xf8, 0x80,0x90};
unsigned char X1,X2;
void IRZ();
void XSQ();
void main()
{ EA=1;
EX0=1;
IT0=1;
P1=0xff;
P2=0xc0;
P3_0=0;
P3_1=0;
SPK=1;
IRIN=1;
IRZ();
XSQ();
}
void delay(unsigned char x)
{ unsigned char i;
while(x--)
{for(i=0;i<10;i++){}}
}
void fs_d()
{unsigned char i;
for(i=0;i<100;i++)
{delay(4);
SPK=~SPK;
}
SPK=1;
}
void IR_IN() interrupt 0 using 0
{ unsigned char j,k,n=0;
EX0=0;
delay(20);
if(IRIN==1)
{EX0=1;
return;
}
while(!IRIN){delay(1);}
for(j=0;j<4;j++)
{for(k=0;k<8;k++)
{while(IRIN) {delay(1);}
while(!IRIN) {delay(1);}
while(IRIN)
{delay(1);
n++;
if(n>=30)
{ EX0=1;
return;}
}
IRDATA[j]=IRDATA[j]>>1;
if(n>=8){IRDATA[j]=IRDATA[j]|0x80;}
n=0;}
}
if(IRDATA[2]!=~IRDATA[3])
{EX0=1;
return;
}
else {}
fs_d();
EX0=1;
}
void XSQ()
{ while(1)
{ X1 = IRDATA[2]/16;
X2 = IRDATA[2]%16;
P3_0=1;P3_1=1;P2=tab[X1];P3_0=1;delay(200);
P3_0=1;P3_1=0;P2=tab[X2];delay(200);
}
}
void IRZ()
{ while(1)
{
switch(IRDATA[2])
{ case 0x01:{P1=0xee;break;}
case 0x02:{P1=0xdd;break;}
case 0x03:{P1=0xbb;break;}
case 0x04:{P1=0X77;break;}
case 0x05:{P1=0xf0;break;}
case 0x06:{P1=0x0f;break;}
case 0x07:{P1=0xaa;break;}
case 0x08:{P1=0x55;break;}
case 0x09:{P1=0xe7;break;}
case 0x10:{P1=0xdb;break;}
case 0x11:{P1=0xbd;break;}
case 0x12:{P1=0x7e;break;}
case 0x13:{P1=0xc3;break;}
case 0x14:{P1=0x3c;break;}
case 0x15:{P1=0x00;break;}
case 0x16:{P1=0xff;break;}
}
X1 = IRDATA[2]/16;
X2 = IRDATA[2]%16;
P2=tab[X2];P3_1=1;delay(10);P3_1=0;
P2=tab[X1];P3_0=1;delay(10);P3_0=0;
}
}
������Word��ʽ�ęn51�����d��ַ��
 ��Ƭ�C(j��)�n���O(sh��)Ӌ.doc
(500.5 KB, ���d��(sh��): 40)
��Ƭ�C(j��)�n���O(sh��)Ӌ.doc
(500.5 KB, ���d��(sh��): 40)
2019-1-8 21:15 �ς�
�c(di��n)���ļ������d����
���d�e��: �ڎ� -5
| 




 ����TQQ:125739409;���g(sh��)����QQȺ281945664
����TQQ:125739409;���g(sh��)����QQȺ281945664








 QQ���Ѻ�Ⱥ
QQ���Ѻ�Ⱥ QQ���g
QQ���g �vӍ��
�vӍ�� �vӍ����
�vӍ���� �ղ�
�ղ� ����
���� �
� ��
��