作為現代社會的新發明,多種高科技技術的集中體現,智能車輛將會是未來車輛發展的一個必然趨勢。它可以在無人參與的情況下,根據預習設定的信息,自動地完成一系列的工作,從而將許多人從繁重地勞動中解脫出來。與傳統汽車相比,智能車輛更加安全、節能、環保,可以大大地提高人們的生活質量。目前為止,由最新技術生產的智能車輛已將在交通、運輸、航天、工業等方面發揮出來舉足輕重地作用[1]。
單片機又名微控制器,它將一個大型計算機的幾乎所有功能都集中在了一個小小的芯片上,它體積小、質量輕、功耗低,十分適合初學者進行學習和開發使用,并且,單片機的結構與真正的計算機幾乎相同,學習單片機是了解計算機原理和結構的最佳選擇[2]。
在本次課題中,以AVR單片機為控制核心,以RPR220型光電對管、E18-D80NK傳感器等傳感器為輔助器件,設計并實現了智能小車系統。小車是一個二輪驅動小車,后方由一個萬向輪可以靈活轉向。在本文中,詳細介紹了智能小車的整體設計思路,以及各個部分的軟硬件設計。小車通過RPR220型光電對管實現了循跡功能,通過E18-D80NK傳感器實現了避障功能,并通過單片機將這些模塊有機的整合到一起,利用C語音進行編程設計,使用ICC7.22開發環境對小車進行程序開發。小車具有運行穩定、價格便宜、能耗低等優點
目錄
摘 要
Abstract
第1章 緒論
1.1 研究的背景和意義
1.2 國內外研究現狀及發展前景
1.3 本次設計的主要任務
第2章 系統方案設計
2.1 總體設計框圖
2.2 核心控制單元的選擇
2.3 循跡方案設計
2.4 避障方案設計
2.5 電機驅動方案選
2.6 電機選擇
第3章 系統硬件電路設計
3.1 最小系統電路
3.2 循跡模塊電路
3.3 避障模塊
3.4 電機驅動模塊
3.4.1 L298N電機驅動芯片
3.4.2 PWM調速原理
3.4.3 驅動電路
第4章 系統軟件設計
4.1 ICCAVR簡介
4.2 主控制模塊主程序設計
4.3 紅外循跡模塊子程序設計
4.4 紅外避障模塊子程序設計
4.5 電機驅動模塊子程序設計
第5章 結論
參考文獻
致 謝
附 錄A 總電路圖
附 錄B 源程序
第1章 緒論 1.1 研究的背景和意義 智能車輛技術集成了機械、電子、自動化等多學科的發展,代表了現代技術發展的前沿。是未來車輛發展的必然趨勢。在實際生活中,智能車輛通常需要根據人們的預設程序完成跟蹤和避障。其中,大多數依靠傳感器技術來獲取路線和周圍的環境。 本文以AVR作為控制核心,設計制作了智能尋線小車。它使用光線對管和紅外傳感器收集周圍的各種信息,自動沿著地面設定的路線行走,并且可以在行走過程中自動躲避障礙物。智能小車采用前輪驅動,兩輪采用直流電機,后輪采用萬向輪。為了確保小車平穩正常地運行,我們采用PID算法控制直流電機地運行。本系統具有操作簡單、成本低、可靠性高、結構緊湊等特點[4]。 1.2 國內外研究現狀及發展前景 智能車輛系統是一種集中了計算機技術、自動化技術、傳感器技術等多種高科技技術于一體的綜合系統。從目前的發展趨勢來看,智能車輛將是未來世界汽車行業發展的最終形態。相比于傳統汽車,智能車輛擁有無法比擬的巨大優勢。 首先,智能車輛是由智能計算機系統控制、連接互聯網自動駕駛,相比于傳統汽車,不僅將駕駛人員從繁重的駕駛工作中解放了出來,還可以大大地提高汽車行駛的安全系數。據谷歌調查,大部分交通事故都是人為造成的。目前隨著輔助駕駛技術、半自動駕駛技術的發展普及,智能駕駛系統可以實時監控駕駛人員的狀態,防止駕駛人員醉酒駕駛、疲勞駕駛、不遵守交通規則駕駛等行為,交通事故的發生率降低了50%~60%。在未來,隨著技術的發展,全自動駕駛普及后,完全不需要駕駛人員,甚至可以完全避免交通事故的發生。 其次,智能車輛擁有更為先進的人機交互界面。智能車輛不僅搭載有智能駕駛系統,還擁有智能生活系統,使駕駛人員和乘客可以更舒適的享受在車上的時光。假如乘客有什么突發情況,智能生活系統還可以提供緊急解決方案。例如,在行駛過程中,如果乘客突發疾病,智能生活系統會主動提出醫療知識提示,防止周圍的朋友因為不懂醫療知識而妄動患者造成二次傷害。并且,智能生活系統會自動將情況上傳至互聯網,將病情告知醫院。而且,智能生活系統還會憑借車聯網疏散通往醫院車輛,使得汽車可以盡快到達醫院,使病人得到及時的治療。 最后,相比傳統汽車,智能車輛更為節能、環保。據谷歌調查,傳統汽車大部分時間都處于停用狀態,利用率較低。智能車輛可以整合車輛信息,將車輛按需分配,提高車輛的利用率,從而減少車輛數量,達到節能、環保的效果。 國外許多發達國家大約在1950年左右就開始研究智能車輛了,截止到目前,一些簡單地半自動智能車已經得到廣泛地應用,但是,全自動智能汽車仍然遙遙無期。2017年9月,美國運輸部對汽車的無人駕駛系統的安全性做出了評估,為以后在國家層面制定相關法律法規奠定了基礎。截止現在,美國已經有22個州以上通過了相關的法律。目前,輔助駕駛技術和半自動駕駛技術已經得到廣泛的普及,世界汽車巨頭正在致力于發展第三階段的全自動駕駛。 與美國等發達國家相比,我國的智能車輛技術的發展之路還比較漫長。我國的智能車輛技術大約是從1980年左右開始起步研究的,目前在一些沿海城市有了很大的發展。在我國,人們正在不斷地加深對智能車輛的重視程度,國家正在不斷加大對智能車輛的研發資金投入力度。相信經過我國的大力研究,以及龐大的市場刺激,我國戴爾智能車輛技術將會飛速提高。據大數據調查分析,未來我國對智能車輛的需求非常大,在2020年左右,半自動駕駛汽車的市場占有率將達到30%,在2025年左右,將達到50%。在2018年,中國的智能汽車將達到50萬輛。到時候,巨大的市場將會推動技術的快速發展,刺激我國的汽車產業尋求技術突破,促進智能汽車產業的優勝劣汰。如圖1-1為常見的智能小車。 
圖1-1 智能小車 1.3 本次設計的主要任務 本次課題主要設計的是一個簡易的智能電動車,采用AVR單片機作為小車的檢測和控制核心。采用RPR220型光電對管來檢測道路上的黑線,從而把反饋到的信號送單片機,是單片機按照預定的工作模式控制小車在各區域按預定的軌跡行駛。并且在小車的行駛過程中,可以自動識別障礙物并自動躲避。
第2章 系統方案設計
2.1 總體設計框圖 在系統層面而言,本系統由四個部分組成。控制核心、循跡模塊、避障模塊、電機驅動模塊。首先,循跡模塊和避障模塊獲取周圍的信息,然后將信息傳遞至控制核心,控制核心進行信息處理后,根據預習設定的程序,將信號傳遞至電機驅動模塊,驅動電機運行。這樣,就完成了小車的循跡和避障功能。系統組成框圖如圖2-1所示[5]。 
圖2-1 總體設計框圖 2.2 核心控制單元的選擇 本課題采用ATmega16單片機作為核心控制單元,ATmega16單片機是采用 RISC結構的AVR內核單片機。ATmega16單片機擁有131個機器指令,32個8位通用工作寄存器等,并且在內部具有2個時鐘周期的硬件乘法器。ATmega16單片機功耗低、價格便宜、運行速度快,十分適合作為嵌入式控制核心。ATmega16單片機的實物圖如圖2-2所示。 
圖2-3 ATmega16單片機的實物圖 2.3 循跡方案設計 方案1:用光敏電阻組成光敏探測器 光敏電阻的阻值會隨著周圍環境中的光線強度變化而變化,光照越強,阻值就越低。當小車行駛時,光敏探測器會不斷地對周圍的環境進行探測。小車的行駛環境為純白色背景下的黑色軌跡。當光敏探測器探測到白色背景時,反射光強度較強,光敏電阻的阻值會降低;當探測到黑色軌跡時,由于黑色的吸光作用,發射光的強度將會降低,光敏電阻的阻值將會變大。正是根據以上原理,小車可以使用光敏探測器進行循跡檢測。但是由于光敏探測器受環境中光照強度的影響較大,不能穩定的工作。 方案2:用CCD攝像頭傳感器 線性CCD傳感器攝像頭可以將光線信號轉換為電荷信號,再傳送至單片機進行處理。CCD攝像頭傳感器的優點是探測距離遠,可以提前探測道路情況,以便做出減速轉彎等操作。使得小車的整體平均速度得到提高,具有良好的前瞻性。但是CCD攝像頭傳感器對于單片機小車來說,消耗資源略大,而且在實際過程中,發現CCD攝像頭在市場上比較稀少,購買難度較大。 方案3:用RPR220型光電對管 RPR220與光敏探測器相似,是一款反射型的光電探測器。首先,RPR220型光電對管會發射出紅外線,當紅外線傳至白色背景時,會反射回來重新被探測器接收,進而輸出一個高電平;若紅外線傳至黑色軌跡時,黑色軌跡會將紅外吸收,探測器檢測不到反射光,就會輸出低電平。RPR220型光電對管具有體積小、結構緊湊、電路簡單、性能穩定等優點。 由于光敏電阻易受周圍環境光照強度影響,CCD 攝像頭對單片機片內資源消耗大等原因,本課題最終確定選擇方案3 。 2.4 避障方案設計 方案1:使用超聲波探測器 超聲波探測器的原理是由探測器發出人耳不可聽見的超聲波,超聲波觸碰到物體后反射回探測器。通過檢測超聲波從發射到反射回來所使用的時間,就可以計算出與物體的距離。超聲波探測器的優點是可以在較差的環境中正常工作,缺點是探測精度較低,使用成本較高。 方案2:使用激光測距傳感器 激光測距傳感器的測距原理與超聲波探測器類似,傳感器發射出激光,經反射后回到傳感器,經過處理計算后即可得到相應的距離。激光測距傳感器的優點是測量距離較長,測量精度較高;缺點是對資源的消耗較大,價格略昂貴。 方案3:使用紅外避障傳感器 E18-D80NK傳感器的邏輯非常簡單,它由發射器和紅外接收器組成,負責感知某個物體的存在。它有一個圓柱形主體,通過鉆孔可以很容易地安裝到原型中,其中2個環用于固定,一個在內部,另一個在原型外部。它的連接通過3個引腳完成,傳感器可以有兩種不同的連接模式,它有兩個信號電平,低電平(0.3到1.5V)和高電平(2.3到5V)。檢測距離可以在3到80厘米之間進行調整,通過位于傳感器底部的電位計進行。 由以上分析,本課題最終確定選擇方案3。 2.5 電機驅動方案選 方案1:采用由晶體管組成的H橋電路 H橋電路可以將直流電逆變為可變頻率的交流電,采用PWM 方式控制電機的運行。PWM是一種脈沖寬度調制方式,其原理是通過調整脈沖的占空比來調整一個周期內電機的通電時間,進而調節電機的運轉速度。H橋電路的優點是穩定性好,應用廣泛。 方案2:采用L298N驅動芯片 L298N屬于H橋集成電路,可驅動大功率直流電機、步進電機等。L298N的優點是它的輸入端可以直接與單片機相連,這樣,可以便于直接受單片機控制。最重要的是,L298N可以同時驅動兩臺直流電機,恰好與本課題相符。 由于以上分析,本課題最終確定選擇方案2 。 2.6 電機選擇 方案1:采用步進電機 步進電機是由脈沖信號驅動轉動的,其特點是可以精確地定位其轉過的角度,進而精確地確定其行駛的距離。但是,步進電機難以獲得較大的轉矩,難以獲得較大的轉速,資源利用率略低,更多地使用在數控機床等需要精確控制的地方[6]。 方案2:采用直流減速電機 直流減速電機是指在普通直流電機的基礎上,配套齒輪減速箱。具有節省空間、能耗低、性能穩定等優點,廣泛地應用于自動化行業中。 由以上分析,步進電機不適用于本次設計的要求,故本課題最終確定采用方案2。
第3章 系統硬件電路設計
3.1 最小系統電路 本課題的中央處理器是ATMEGA16單片機,其主要功能是不停地接收由尋跡模塊和避障模塊中的傳感器發送過來的信號,經過處理后將信息發送至電機驅動模塊,從而實現對周圍環境的實時響應。如圖3-1是較為常見的帶燒錄接口的單片機最小系統圖。 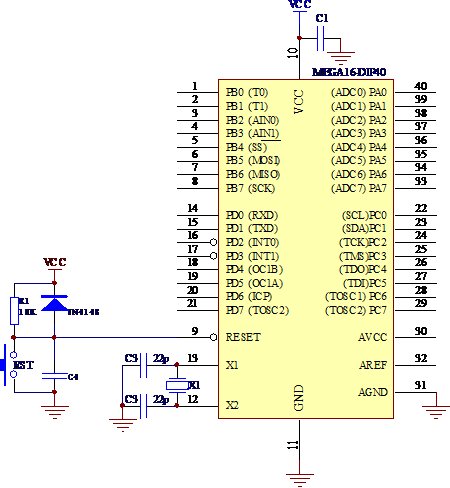
圖3-1 最小系統電路 3.2 循跡模塊電路 循跡模塊電路所用傳感器是RPR220型光電對管,如圖3-2所示。RPR220是一款集成式光電探測器,其發射極為GaAs紅外發射二極管,接收器為高靈敏度硅平面光電晶體管。 
圖3-2 RPR220 GaAs紅外發射二極管向目標發射紅外線,光電晶體管接收到由目標反射的紅外線后,向單片機發射電平跳變信號。當小車行駛在白色背景上時,安裝在小車下方的發射極對地面發射紅外光,經白色背景反射后,光電晶體管將打開。尋跡模塊電路如圖3-3所示。 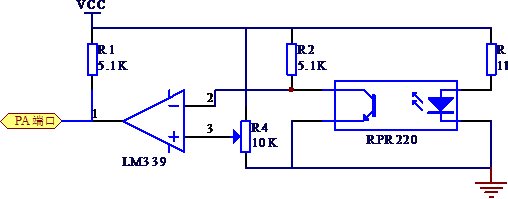
圖3-3尋跡模塊電路圖 當小車行駛在黑色軌跡上時,紅外光被黑色背景吸收,光電晶體管不能接收到反射光,LM339電壓比較器截止,輸出低電平至單片機。因此,根據單片機I/O口接收電平不同,即可判斷小車的行駛情況。 為了保證小車沿黑線行駛,采用了四個檢測器并行排列,檢測器排列位置如圖3-4所示。其編號1至4對應的硬件電路分別接在單片機的PA0、PA1、PA2、PA3端口。在小車運動過程中,結合查詢方式,通過程序控制小車運動軌跡。如果2號紅外對管和3號紅外對管檢測到黑線,則單片機控制小車向前直走;如果2號紅外對管偏離黑線,3號紅外對管檢測到黑線,則單片機控制小車輕微左移;如果3號紅外對管偏離黑線,2號紅外對管檢測到黑線,則單片機控制小車輕微右移;如果2號和3號紅外對管偏離黑線,1號紅外對管檢測到黑線,則單片機控制小車向左移動;如果2號和3號紅外對管偏離黑線,4號紅外對管檢測到黑線,則單片機控制小車向左移動[7]。 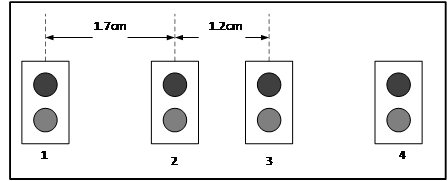
圖3-4 檢測器位置 3.3 避障模塊 避障模塊采用型號為E18-D80NK的紅外避障傳感器,如圖3-5所示。 
圖3-5 E18-D80NK E18-D80NK傳感器的邏輯非常簡單,它由發射器和紅外接收器組成,負責感知某個物體的存在。它有一個圓柱形主體,通過鉆孔可以很容易地安裝到原型中,其中2個環用于固定,一個在內部,另一個在原型外部。它的連接通過3個引腳完成,傳感器可以有兩種不同的連接模式,它有兩個信號電平,低電平(0.3到1.5V)和高電平(2.3到5V)。檢測距離可以在3到80厘米之間進行調整,通過位于傳感器底部的電位計進行[8]。 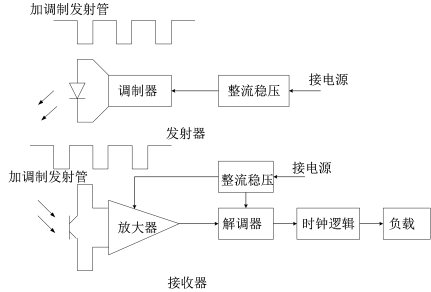
圖3-6 E18-D80NK原理圖 E18-D80NK電氣特性如表3-1。
表3-1 E18-D80NK電氣特性
E18-D80NK紅外避障傳感器在小車正常運行時,輸出高電平;當檢測到前方有障礙物時,輸出低電平,黃色的線作為E18-D80NK紅外避障傳感器的輸出口,直接與單片機相連,將檢測信號送入單片機中,經進一步處理后,使小車做出相應的變化。避障模塊電路如圖3-7所示。避障模塊采用三只紅外避障傳感器,安裝于小車兩側及下中央,可以檢測兩側和正前方是否有障礙,檢測后將信號送入單片機,單片機對信號進行處理并發出相應的信號驅動小車電機,使小車躲避障礙。其左中右三個傳感器的硬件電路分別接到單片機的PB0、PB1、PB2 端口。當三個傳感器檢測到無障礙時,小車正常前進行駛;當前側傳感器檢測到有障礙時,小車右轉;當左側或左及前側傳感器檢測到障礙時,小車右轉;當右側或右側及前側傳感器檢測到障礙時,小車左轉;當三個傳感器都檢測到有障礙或左右側傳感器檢測到有障礙時,小車停止[9]。 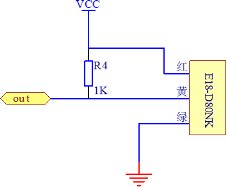
圖3-7避障模塊電路 3.4 電機驅動模塊 3.4.1 L298N電機驅動芯片 L298N是由意法半導體公司研發制造的一款雙全橋大電流(2A*2)電機驅動芯片,比較常見的是15腳MulTIwatt封裝的L298N,內部同樣包含4通道邏輯驅動電路。可以方便的驅動兩個直流電機,其實物圖及直流電機實物如圖3-8所示。
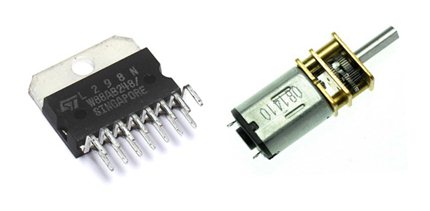
圖3-8 L298N及電機實物圖 L298N屬于H橋集成電路,可驅動大功率直流電機、步進電機等。L298N的平均輸出電流為2A,最大時甚至可達到4A,其輸入端可以直接與單片機相連,從而很方便地受單片機的控制。 圖3-9為L298N的引腳圖,圖中Current sensing為電流感應電阻,可以在Current sensing連接電流表,以此來檢測L298N中流過的電流。OUTPUT為L298N的輸出端,其中,OUTPUT 1和OUTPUT 2為A相的兩個輸出,OUTPUT 3和OUTPUT 4為B相的兩個輸出,可以用來連接電機。INPUT是L298N的輸入端,INPUT的電平決定了相應編號的OUTPUT的電平。ENABLE為L298N的使能端,若ENABLE為高電平,則OTPUT就會與INPUT保持一致,否則,OUTPUT不與任何端口相連。LOGIC SUPPLY VOLTAGE VSS是L298N的邏輯電壓,為L298N中的邏輯器件提供電源。GND為L298N的接地端。SUPPLY VOLTAGE VSS為L298N的驅動電壓,為電機提供電源[10]。
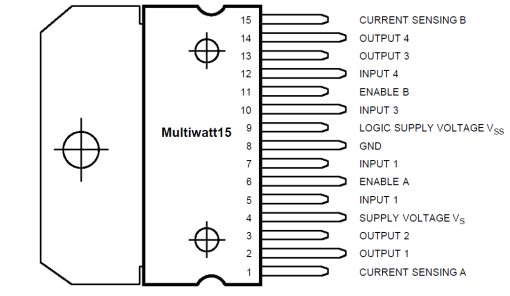
圖3-9 L298N引腳 3.4.2 PWM調速原理 脈沖寬度調制(PWM)是英文“Pulse Width Modulation”的縮寫,簡稱脈寬調制。PWM調速的原理是調節在一個周期內驅動脈沖的占空比,進而調節電機的供電時間比例。在一個周期內,占空比越大,則電機的供電時間越長,電機的運轉速度就越快。因此,電機的調速范圍最小為零,最大為持續供電的電機轉速[11]。 3.4.3 驅動電路 直流電機驅動電路使用H型全橋式驅動電路。這種驅動電路可以很方便實現直流電機的四象限運行,分別對應正轉、正轉制動、反轉、反轉制動。在本設計中電機驅動電路由集成驅動芯片L298N構成,并結合PWM進行調速。ATmega16單片機本身帶有四個PWM輸出端口,通過設定其內部參數來控制PWM的輸出,來改變脈沖寬度調制的占空比。本設計選用四個I/O口中的PD4及PD5為PWM信號的輸出端口。它的基本原理圖如圖3-10所示[12]。 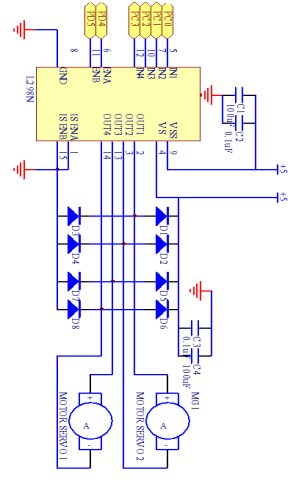
圖3-10 驅動電路 該驅動電路可以驅動兩路直流電機,使能端ENA、ENB為高電平時有效,控制方式及直流電機狀態圖如表3-1所示。 表3-1 電機驅動控制方式及直流電機狀態
若要對直流電機進行PWM調速,需設置IN1和IN2,確定電機的轉動方向,然后對使能端輸出PWM脈沖,即可實現調速。注意,當使能信號為0時,電機處于停止狀態;當使能信號為1時,00和11的IN1和IN2,制動電機,停止電機旋轉[13]。 對于汽車的轉向控制,需要向ENA和ENB輸入不同的PWM信號,以實現直流電動機的轉速差,從而實現汽車轉向。本設計中有微調轉彎和轉彎兩種轉彎狀態,微調轉彎是其中一個PWM信號不變,另一個的占空比減少一半;轉彎是其中一個PWM信號不變,另一個無PWM信號輸出[14]。 1
沈陽工業大學本科生畢業論文 第4章 系統軟件設計 本課題的系統軟件部分采用模塊化設計方案。模塊化設計方案不僅邏輯清晰,而且便于編程,發現錯誤后,更是便于修改。系統軟件共分為四個模塊,分別為主程序模塊、尋跡模塊、避障模塊以及電機驅動模塊。尋跡模塊和避障模塊不斷采集周圍環境的信息發送至處理器,再由處理器處理后發送至電機驅動模塊,以便于小車可以隨環境變化而做出改變。本設計的源程序見附錄B。 4.1 ICCAVR簡介 該設計使用的開發環境為ICCAVR開發環境。 ICCAVR是ATMEL公司專門為AT90系列單片機開發的編譯工具。ICCAVR是一個集成的工作環境,簡稱IDE,它綜合了編輯器和工程管理器等功能,并且可以根據開發的單片機的不同,選擇不同的初始值,以及是否使用定時器等功能,十分強大,是一個被眾多單片機開發人員廣泛使用的開發環境。 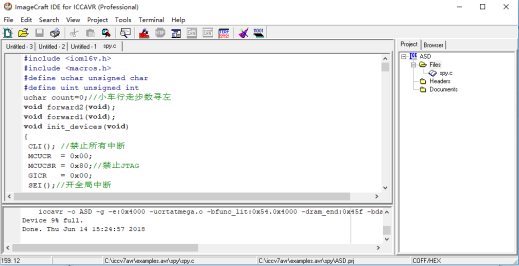
圖4-1 ICCAVR 界面 4.2 主控制模塊主程序設計 主控制模塊主程序流程圖如圖4-2,它的作用是整合小車的各個模塊,使其正常、協調的運行。當小車開始運行后,初始化各個變量,并負責接收各個子模塊的信息,綜合處理后再按照預先的設定不斷的做出反應,從而實現本課題的設計要求[15]。 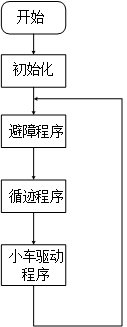
圖4-2主程序流程圖 4.3 紅外循跡模塊子程序設計 循跡模塊的功能主要是不斷的采集周圍環境中的信息,并將其發送至控制核心單元,以便于小車進行下一步操作。流程圖如圖4-3所示。 紅外跟蹤模塊子程序接收外圍紅外檢測電路信號并對接收到的信號進行編碼,紅外檢測外圍電路紅外對管位置如圖3-4。當紅外對管檢測到白色背景時輸出高電平,檢測到黑色軌跡時輸出低電平。外圍電路紅外對管狀態進行信號編碼后對應表格如表4-1,將信號進行處理編碼之后,判斷信號類型,當信號為:1000,1100,1110,0100時,單片機送出左轉信號;當信號為:0001,0011,0111,0010時,單片機送出右轉信號;當信號為:0111,1111時,單片機送出直走信號;當信號為:0000時,停止。信號0101,1010,1101,1011,1001為無效信號[16]。 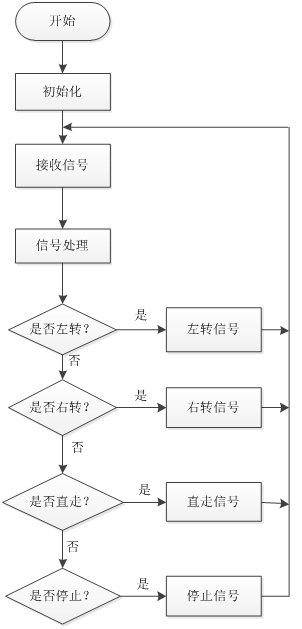
圖4-3 紅外循跡模塊子程序流程圖
表4-1 外圍電路紅外對管狀態進行信號編碼后對應表
4.4 紅外避障模塊子程序設計 紅外避障模塊子程序流程圖如圖4-4所示。避障模塊采用E18-D80NK傳感器來探測前方的道路上15厘米的距離之內有無障礙物,進而將探測結果發送至核心控制單元,等待控制單元做出下一步的處理[17]。 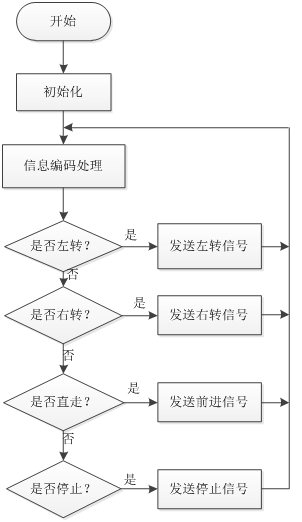
圖4-4 紅外避障程序流程圖
避障模塊不斷的通過傳感器采集周圍環境中的信息,當前方15厘米內沒有障礙物時,小車保持前進狀態,若有障礙物則可通過小車前方及左右方的紅外避障傳感器,獲得障礙物的具體情況進行信息處理編碼,編碼方式如下表4-2。 將外部信息進行編碼后,通過對信號的判斷,控制小車的移動方向:探測結果111,表明前方15cm內無障礙物單片機送出“前進”指令,小車保持前進狀態;探測結果000,表明前方及左右兩邊15cm內均有障礙物,單片機送出“停止”指令;探測結果101,表明前方15cm內有障礙物左右兩邊均無障礙物,單片機送出“右轉”指令(左右均無障礙物默認右轉);探測結果001,表明前方及左邊15cm內有障礙物,單片機送出“右轉”指令;探測結果100,表明前方及右邊15cm內有障礙物,單片機送出“左轉”指令;探測結果110,表明右邊15cm內有障礙物,單片機送出“左轉”指令;探測結果011,表明左邊15cm內有障礙物,單片機送出“右轉”指令;探測結果010,表明左邊及右邊15cm內有障礙物,單片機送出“停止”指令[18]。
表4-2 紅外避障模塊外圍電路信息處理編碼表
4.5 電機驅動模塊子程序設計 電機驅動模塊不斷的等待接受單片機發出的指令,并可以根據指令控制電機做出不同的反應,進而控制小車的運動[19]。流程圖如圖4-5所示。 當接收指令0x00:無數據,無PWM波,無方向信號。當接收指令0x01:小車前進,兩個電機驅動器給予相同的PWM波,相同的方向信號。當接收指令0x02:小車后退,在前進的基礎上改變方向信號。當接收指令0x03:小車停止,無PWM波,無方向信號。當接收指令0x04:結合循跡模塊的信號向左微轉或左轉。當接收指令0x05:結合循跡模塊的信號向右微轉或右轉。 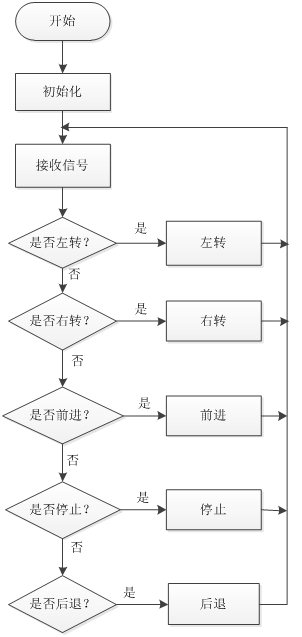
圖4-5電機控制程序流程圖
第5章 結論
通過這個學期的不斷深入學習,深入了解了AVR單片機的各個特性,以及ICCAVR的使用方法,設計并實現了可以自動循跡、避障的智能小車。大大提高了自己的動手能力以及獨立學習的能力。通過本課題的學習研究,我深刻地認識到,只學習課本上的知識是遠遠不夠的,必須緊跟時代的發展趨勢,不斷地學習新的知識,努力地提高自己,才能達到自己預期的目標。 在本課題中,以AVR單片機為控制核心,以RPR220型光電對管、E18-D80NK傳感器等作為輔助模塊,完成了可以自動循跡、避障的智能小車。小車實現了以下幾個功能: - 小車可以自動沿著白色背景上的黑色軌跡行駛,一旦行駛過程中有所偏離,還可以自動回到黑色軌跡上來。
- 小車在行駛過程中,可以自動檢測前方的道路上有無障礙物。若有障礙物,可以實現自動躲避并繼續行駛。
通過本次課題的學習,我不但掌握了很多以前學的不明白的知識,還學習了很多新知識,有了很大的收獲。
致 謝 本論文的設計是在關新老師的悉心指導下完成的。從課題的選擇、到具體的設計,無論在理論上還是在實踐中都給了我許多指導和幫助,使我得以改進和提高。她嚴謹的治學態度,求真務實的學術作風,深厚的理論水平,豐富的項目經驗,都深刻地影響著我,使我終身受益。值此論文完成之際,我謹向關新老師表示深深的感謝和崇高的敬意! 同時,在撰寫畢業論文過程中,得到了我的同學李佳城、吳濟等同學各方面的熱誠幫助,使我能夠順利完成畢業論文,在此致以深深的謝意!
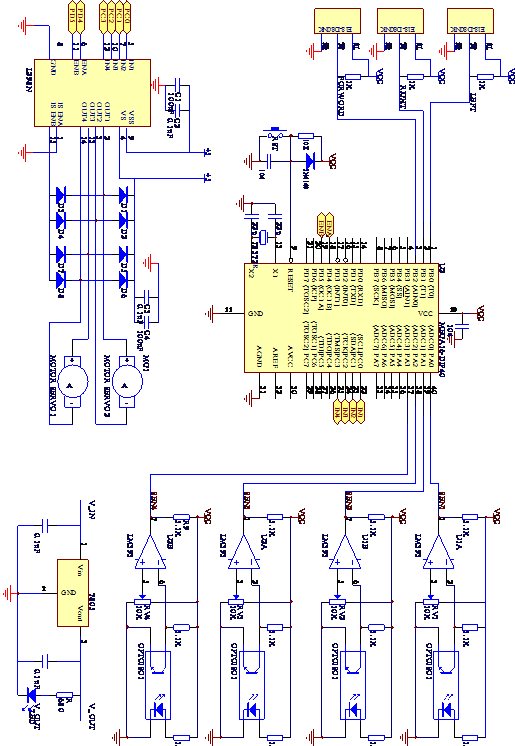
附 錄A 總電路圖
附 錄B 源程序
| 









 QQ好友和群
QQ好友和群 QQ空間
QQ空間 騰訊微博
騰訊微博 騰訊朋友
騰訊朋友 收藏
收藏 淘帖
淘帖 頂
頂 踩
踩

