《自動控制原理綜合性實驗》任務書
一、實習性質(zhì)及目的
自動控制原理是測控技術(shù)與儀器專業(yè)學生的一門必修專業(yè)基礎(chǔ)課,課程中的一些概念相對比較抽象,如系統(tǒng)的穩(wěn)定性、穩(wěn)態(tài)誤差等。倒立擺系統(tǒng)是一個典型的非線性、強耦合、多變量和不穩(wěn)定系統(tǒng),作為控制系統(tǒng)的被控對象,它是一個理想的教學實驗設(shè)備,許多抽象的控制概念都可以通過倒立擺直觀地表現(xiàn)出來。本課程設(shè)計的目的是讓學生以一階倒立擺為被控對象,知道用古典控制理論設(shè)計控制器(如根軌跡、PID控制等)的設(shè)計方法,熟悉MATLAB仿真軟件的使用方法及控制系統(tǒng)的調(diào)試方法,加深學生對所學課程及測控技術(shù)與儀器專業(yè)的理解,培養(yǎng)學生理論聯(lián)系實際的能力。
二、實習主要內(nèi)容
1. 以深圳元創(chuàng)興便攜式直線一級倒立擺為研究對象,建立一階倒立擺數(shù)學模型,并完成模型仿真及實驗。
2. 知道旋轉(zhuǎn)編碼器的基本原理,知道利用計算機和數(shù)據(jù)采集卡對編碼器進行數(shù)據(jù)采集的方法,知道利用計算機對電機進行控制的基本原理和方法。
3. 熟悉基于根軌跡法的倒立擺控制的原理和方法,學會利用根軌跡法選擇不同參數(shù)設(shè)計控制器,并進行仿真和實時控制實驗。
參數(shù)選擇如下:0.9s
參數(shù)選擇如下:25.4%
4. 熟悉基于PID校正的便攜式倒立擺控制原理和方法;隨機設(shè)計三個不同參數(shù)的PID校正系統(tǒng),并進行仿真以及實時控制實驗;求出最佳的PID校正系統(tǒng)參數(shù),并進行仿真以及實時控制實驗。
三、設(shè)計題目
倒立擺系統(tǒng)的控制器設(shè)計
四、實習進度或計劃
1. 布置任務及熟悉元創(chuàng)興便攜式直線一級倒立擺 0.5天
2. 一階倒立擺數(shù)學模型建模及仿真 1.0天
3. 基于根軌跡法的便攜式倒立擺控制 1.5天
基于PID的便攜式倒立擺控制 1.5天
答辯 0.5天
五、設(shè)計說明書包括的主要內(nèi)容
目錄
設(shè)計任務書
設(shè)計題目
正文按上述實習主要內(nèi)容撰寫
心得體會
主要參考文獻
目錄
第一章 緒論
1.1 MATLAB\Simulink簡介
1.2 倒立擺簡介
1.2.1 倒立擺介紹
1.2.2 直線一級倒立擺
1.3 旋轉(zhuǎn)編碼器
第二章 一級倒立擺數(shù)學模型建立
2.1 一級倒立擺動力學方程建立(微分法)
2.2 開環(huán)響應分析
2.2.1 系統(tǒng)階躍響應分析
2.2.2 穩(wěn)定性分析
第三章 控制器的設(shè)計
3.1 根軌跡法設(shè)計
3.1.1 原系統(tǒng)根軌跡分析
3.1.2 設(shè)計控制器
3.3 PID控制設(shè)計
3.3.1 PID控制介紹
3.3.2 PID控制參數(shù)設(shè)計及仿真
第四章 總結(jié)
參考文獻
附錄1
附錄2
第一章 緒論
1.1 MATLAB\Simulink簡介MATLAB是Math Works公司開發(fā)的,目前國際上最流行,應用最廣泛的科學與工程計算軟件。MATLAB又稱為“矩陣實驗室”,其強項就是高效的矩陣計算。MATLAB集成了二維和三維圖形功能,以完成相應數(shù)值可視化的工作,并且提供了一種交互式的高級編程語言—M語言,利用M明天。語言可以通過編寫腳本或者函數(shù)文件實現(xiàn)用戶自己的算法。 Simulink是基于MATLAB的框圖設(shè)計環(huán)境,可以用來對各種動態(tài)系統(tǒng)進行建模分析和仿真。Simulink提供了利用鼠標拖拽的方法建立系統(tǒng)框圖模型的圖形界面,而且Simulink還提供了豐富的功能塊和不同的專業(yè)模塊集合,利用Simulink幾乎可以做到不書寫一行代碼完成整個動態(tài)系統(tǒng)的建模工作。 1.2 倒立擺簡介
1.2.1 倒立擺介紹倒立擺是自動控制領(lǐng)域典型的控制對象,為眾多研究人員驗證控制理論及算法所采用。本實驗的便攜式倒立擺系統(tǒng),是一個具有多控制對象、模塊化、多實驗環(huán)境、拆裝方便等特點的典型對象。近年來,新的控制方法不斷出現(xiàn),人們試圖通過倒立擺這樣一個典型的控制對象,檢驗新的控制方法是否有較強的處理多變量、非線性和絕對不穩(wěn)定系統(tǒng)的能力,從而從中找出最優(yōu)秀的控制方法。倒立擺系統(tǒng)作為控制理論研究中的一種比較理想的實驗手段,為自動控制理論的教學、實驗和科研構(gòu)建一個良好的實驗平臺,以用來檢驗某種控制理論和方法的典型方案,促進了控制系統(tǒng)新理論、新思想的發(fā)展。 由于控制理論的廣泛應用,由此系統(tǒng)研究產(chǎn)生的方法和技術(shù)將在半導體及精密儀器加工、機器人控制技術(shù)、人工智能、導彈攔截控制系統(tǒng)、航空對決控制技術(shù)、火箭發(fā)射中的垂直度控制、衛(wèi)星飛行中的姿態(tài)控制和一般工業(yè)應用等方面具有廣闊的利用開發(fā)前景。 1.2.2 直線一級倒立擺直線一級倒立擺由直線運動模塊和一級擺體組件組成,是最常見的倒立擺之一。該系統(tǒng)相對其他倒立擺較為簡單,但能體現(xiàn)倒立擺系統(tǒng)控制的基本思想,故主要針對直線一級倒立擺進行設(shè)計。 倒立擺的控制目標:倒立擺的控制問題就是使擺桿盡快的達到一個平衡位置,并且使之沒有大的振蕩和過大的角度和速度。當擺桿達到期望的位置后,系統(tǒng)能克服隨機擾動而保持穩(wěn)定的位置。 倒立擺控制系統(tǒng)輸出為擺桿角度和小車位置,通過對控制對象設(shè)計合適的校正環(huán)節(jié),使得擺桿起擺后保持穩(wěn)擺,設(shè)計方式有跟軌跡法、頻域法、PID法,串聯(lián)校正方式又有超前校正、滯后矯正、滯后—超前矯正。不同分析方式的特點選擇合適校矯正方法,設(shè)計合適的控制器,使系統(tǒng)滿足相應的指標。本設(shè)計主要是采用根軌跡法和PID法。 1.3 旋轉(zhuǎn)編碼器旋轉(zhuǎn)編碼器是一種角度傳感器,它分為光電式、接觸式和電磁感應式三種。我們在閉環(huán)系統(tǒng)中常用光電式編碼器來測角度。旋轉(zhuǎn)編碼器有增量編碼器和絕對編碼器兩種,它由發(fā)光元件、光電碼盤、光敏元件和光電檢測裝置組成。由于光電式脈沖編碼盤每轉(zhuǎn)過一個分辨角就發(fā)出一個脈沖信號,因此,根據(jù)脈沖數(shù)目可得出工作軸的回轉(zhuǎn)角度,由傳動比換算出直線位移距離;根據(jù)脈沖頻率可得工作軸的轉(zhuǎn)速;根據(jù) 、 、 兩相信號的相位先后,可判斷光電碼盤的正、反轉(zhuǎn),以得到待測裝置轉(zhuǎn)向。 兩相信號的相位先后,可判斷光電碼盤的正、反轉(zhuǎn),以得到待測裝置轉(zhuǎn)向。 由于光電編碼器輸出的檢測信號是數(shù)字信號,因此可以直接進入計算機進行處理,不需放大和轉(zhuǎn)換等過程,使用非常方便,因此應用越來越廣泛。
第二章 一級倒立擺數(shù)學模型建立
2.1 一級倒立擺動力學方程建立(微分法)由于狀態(tài)反饋要求被控系統(tǒng)是一個線性系統(tǒng),而倒立擺系統(tǒng)本身是一個非線性的系統(tǒng),因此用狀態(tài)反饋來控制倒立擺系統(tǒng),首先要將這個非線性系統(tǒng)近似成為一個線性系統(tǒng)。在忽略了空氣流動和各種摩擦之后,可將倒立擺系統(tǒng)抽象成小車和勻質(zhì)桿組成的系統(tǒng)。 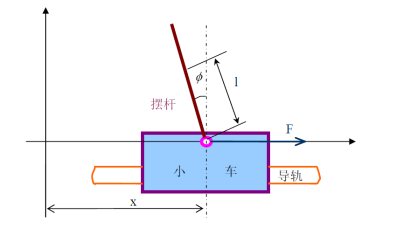
圖2.1 直線一級倒立擺運動示意圖 M 小車質(zhì)量 m 擺桿質(zhì)量 b 小車摩擦系數(shù) l 擺桿轉(zhuǎn)動軸心到桿質(zhì)心的長度 I 擺桿慣量 F 加在小車上的力 x 小車位置  擺桿與垂直向上方向的夾角 擺桿與垂直向上方向的夾角
  擺桿與垂直向下方向的夾角(考慮到擺桿初始位置為豎直向下) 擺桿與垂直向下方向的夾角(考慮到擺桿初始位置為豎直向下)

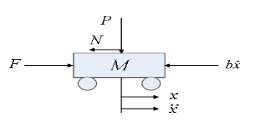
圖2.2 小車受力圖 圖2.3 擺桿受力圖 圖2.2和圖2.3是系統(tǒng)中小車和擺桿的受力分析圖。其中N 和P 為小車與擺桿相互作用力的水平和垂直方向的分量,圖示方向為矢量正方向。 分析小車水平方向所受的合力,可以得到以下方程:  (1) (1)
由擺桿水平方向的受力進行分析可以得到下面等式: 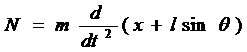 (2) (2)
即:  (3) (3) 把這個等式代入(1)式中,就得到系統(tǒng)的水平方向運動方程: (4) 對擺桿垂直方向上的合力進行分析,可以得到: (5) (6) 力矩平衡方程:  (7) (7)
合并式(6)、(7)消去P和N得到第二個方程:  (8) (8)
設(shè) ( ( 是擺桿與垂直向上方向之間的夾角),假設(shè)與1(單位是弧度)相比很小,即<<1,則可以進行近似處理: 是擺桿與垂直向上方向之間的夾角),假設(shè)與1(單位是弧度)相比很小,即<<1,則可以進行近似處理:  (9) (9) 用u來代表被控對象的輸入力F,線性化后兩個運動方程如下: 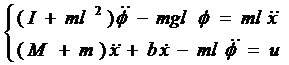 (10) (10) 對方程組(9)式進行拉普拉斯變換,得到方程組:  (11) (11) 注意:推導傳遞函數(shù)時假設(shè)初始條件為0。由于輸出為角度 ,求解方程組的第一個方程,可以得到: ,求解方程組的第一個方程,可以得到:  (12) (12) 如果令 ,則有: ,則有:  (13) (13) 把上式代入方程組的第二個方程,得到:  (14) (14)
整理后得到傳遞函數(shù):  (15) (15)
其中  設(shè)系統(tǒng)狀態(tài)空間方程為: 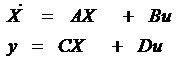 (16) (16) 方程組對 解代數(shù)方程,得到解如下: 解代數(shù)方程,得到解如下: 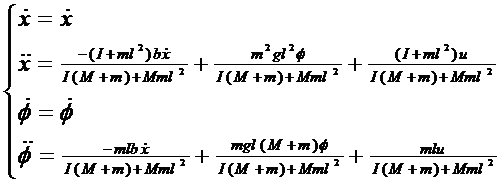 (17) (17)
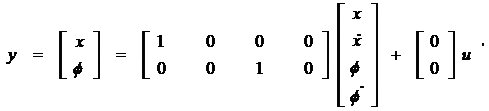
整理后得到以外界作用力(u來代表被控對象的輸入力F)作為輸入的系統(tǒng)狀態(tài)方程: 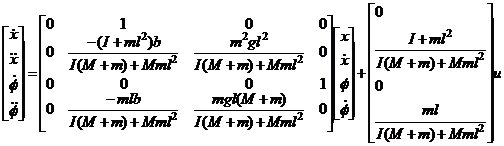 (18) (18)
 (19) (19)
由方程組(9)得第一個方程為:  (20) (20) 對于質(zhì)量均勻分布的擺桿有:  (21) (21) 于是可以得到:  (22) (22) 化簡得到:  (23) (23) 設(shè) ,則可以得到以小車加速度作為輸入的系統(tǒng)狀態(tài)方程: ,則可以得到以小車加速度作為輸入的系統(tǒng)狀態(tài)方程: 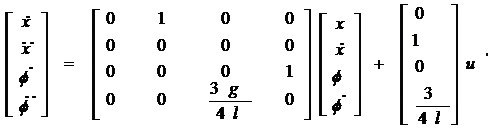 (24) (24)
 (25) (25)
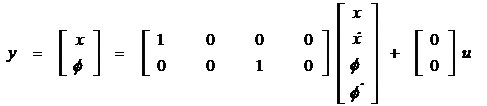
以小車加速度為控制量,擺桿角度為被控對象,此時系統(tǒng)的傳遞函數(shù)為:  (26) (26) 將物理參數(shù)代入上面的系統(tǒng)狀態(tài)方程和傳遞函數(shù)中得到系統(tǒng)精確模型。系統(tǒng)狀態(tài)空間方程: : (27) (27) 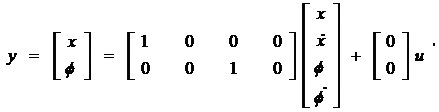 (28) (28)
系統(tǒng)傳遞函數(shù): 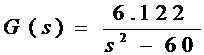 (29) (29) 2.2 開環(huán)響應分析
2.2.1 系統(tǒng)階躍響應分析上面已經(jīng)得到系統(tǒng)的狀態(tài)方程式,對其進行階躍響應分析,在MATLAB命令窗口鍵入以下命令: A=[0 1 0 0;0 0 0 0;0 0 0 1;0 0 60 0]; B=[0 1 0 6.122]’; C=[1 0 0 0;0 0 1 0]; D=[0 0]’; step(A,B,C,D); 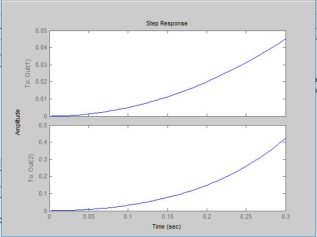
圖2.4 階躍響應曲線 從圖中分析,未校正前系統(tǒng)是不穩(wěn)定的。 2.2.2 穩(wěn)定性分析由系統(tǒng)傳遞函數(shù)(29)式可得其特征方程為:  (30) (30) 可得其特征根為: 。顯然,有一個特征根位于s平面的右半平面,所以便攜式直線一級倒立擺系統(tǒng)是不穩(wěn)定的。 。顯然,有一個特征根位于s平面的右半平面,所以便攜式直線一級倒立擺系統(tǒng)是不穩(wěn)定的。
第三章 控制器的設(shè)計
3.1 根軌跡法設(shè)計
3.1.1 原系統(tǒng)根軌跡分析根據(jù)傳遞函數(shù)式 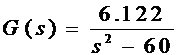 ,利用MATLAB得到原系統(tǒng)的根軌跡,如圖3.1,有兩個極點 ,利用MATLAB得到原系統(tǒng)的根軌跡,如圖3.1,有兩個極點 ,無零點。 ,無零點。 MATLAB程序設(shè)計如下: num=[6.122]; den=[1,0,-60]; rlocus(num,den); z=roots(num); p=roots(den) 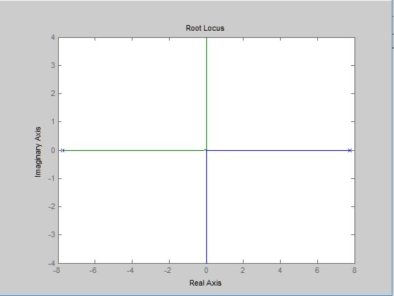
圖3.1 校正前的根軌跡圖 從根軌跡上可以看出,有一條根軌跡起始于右半平面的極點,兩條根軌跡沿著虛軸向無限遠處延伸,這意味著無論增益如何變化,這條根軌跡總是位于右半平面,即系統(tǒng)總是不穩(wěn)定的,必須增加控制器對其進行校正。
3.1.2 設(shè)計控制器從根軌跡圖中可得,系統(tǒng)并不穩(wěn)定,因此需要對系統(tǒng)進行超前校正,對于傳遞函數(shù)為: 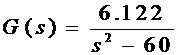 設(shè)計控制器使得校正后系統(tǒng)的性能指標如下: 調(diào)整時間 、最大超調(diào)量, 、最大超調(diào)量, ; ; 確定閉環(huán)期望極點 的位置,由最大超調(diào)量: 的位置,由最大超調(diào)量: 
可以得到 ,取 ,取 ,由 ,由 得 得 rad,其中 rad,其中 為位于第二象限的極點和原點的連線與實軸負方向的夾角。 為位于第二象限的極點和原點的連線與實軸負方向的夾角。 又由 ,可以得到 ,可以得到 ,取 ,取 ,于是可以得到期望的閉環(huán)極點= ,于是可以得到期望的閉環(huán)極點= 未校正系統(tǒng)的根軌跡在實軸和虛軸上,不通過閉環(huán)期望極點,因此需要對系統(tǒng)進行超前校正,設(shè)控制器為: 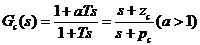 計算超前校正裝置應提供的相角,已知系統(tǒng)原來的極點在主導極點產(chǎn)生的滯后相角和為: 
所以一次校正裝置提供的相角為: 
設(shè)計超前校正裝置,已知 ,對于最大的 ,對于最大的 值的 值的 角度: 角度: 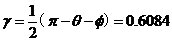
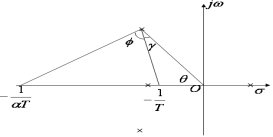
圖3.2 根軌跡校正計算圖 按最佳確定法作圖規(guī)則,在上圖中畫出相應的直線,求出超前校正裝置的零點和極點,分別為: 校正后系統(tǒng)的開環(huán)傳遞函數(shù)為:  由幅值條件 ,并設(shè)反饋為單位反饋,即 ,并設(shè)反饋為單位反饋,即 。 。  求得: 于是我們得到了系統(tǒng)的控制器: 
校正后用Matlab繪制根軌跡和階躍響應曲線的程序如下: num=[6.122]; den=[1 0 -60]; numlead=-7.0675; denlead=-21.4332; [Z,P,K]=tf2zp(num,den); Za=[Z;numlead]; Pa=[P;denlead]; [num2,den2]=zp2tf(Za,Pa,K); sys=tf(num2,den2); rlocus(sys); figure KK=48.6810; sys2=zpk(Za,Pa,KK*K); sysc=sys2/(1+sys2); t=0:0.01:3; step(sysc,t); 在第一次調(diào)試時,選擇的 時,得到的根軌跡以及階躍響應曲線如圖3.3所示,可得,出現(xiàn)了超調(diào),若要解決此問題則要重新選擇 時,得到的根軌跡以及階躍響應曲線如圖3.3所示,可得,出現(xiàn)了超調(diào),若要解決此問題則要重新選擇 進行設(shè)計,可以采用增加阻尼 進行設(shè)計,可以采用增加阻尼 ,重復上面的設(shè)計方法,重新設(shè)計,直到系統(tǒng)的響應滿足要求。或者在保持 ,重復上面的設(shè)計方法,重新設(shè)計,直到系統(tǒng)的響應滿足要求。或者在保持 角不變的情況下,將校正裝置的零點向左側(cè)偏移,以減少閉環(huán)零點和極點的影響。 角不變的情況下,將校正裝置的零點向左側(cè)偏移,以減少閉環(huán)零點和極點的影響。
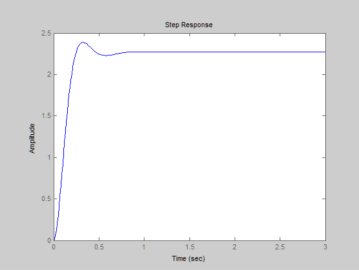
圖3.3 出現(xiàn)超調(diào)現(xiàn)象圖 
圖3.4 校正后根軌跡圖 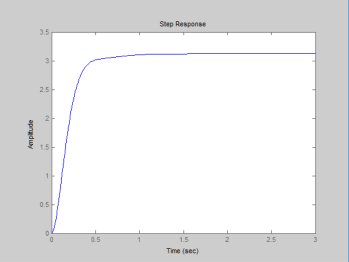
圖3.5 校正后系統(tǒng)階躍響應曲線 根據(jù)以上兩圖可以看出,校正后具有很好的穩(wěn)定性,但在實際調(diào)試過程中發(fā)現(xiàn)存在一定的穩(wěn)態(tài)誤差,通過對倒立擺的實物調(diào)試,尋找最優(yōu)的K值。在調(diào)試時,發(fā)現(xiàn)K值越大出現(xiàn)倒立擺劇烈抖動,不穩(wěn)定,出現(xiàn)超調(diào)現(xiàn)象,所以根據(jù)倒立擺的實際情況最終選擇K=48.7915。因與理論計算的結(jié)果相差不大,故而,不再重新設(shè)計。 在Simulink中進行仿真,設(shè)置好設(shè)計所得的參數(shù)。如圖3.6所示為Simulink模型搭建圖。 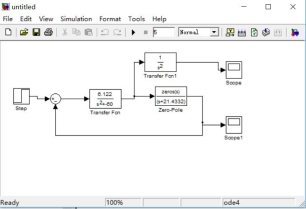
圖3.6 根軌跡模型搭建 運行以后得到如圖3.7所示的仿真結(jié)果。 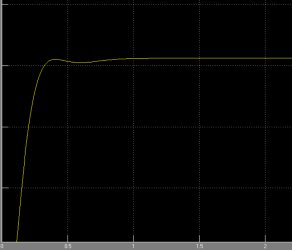
圖3.7 擺桿角度響應曲線 根軌跡法控制器設(shè)計實物調(diào)節(jié)及參數(shù)設(shè)置見附錄1。 3.3 PID控制設(shè)計
3.3.1 PID控制介紹PID控制器因其結(jié)構(gòu)簡單,容易調(diào)節(jié),且不需要對系統(tǒng)建立精確的模型,在實際控制中應用較廣。 PID調(diào)節(jié)器各校正環(huán)節(jié)的作用是: 比例環(huán)節(jié):即時成比例的反映控制系統(tǒng)偏差信號;偏差一旦產(chǎn)生,調(diào)節(jié)器立即產(chǎn)生控制作用以減小偏差,產(chǎn)生過調(diào); 積分環(huán)節(jié):主要用于消除靜差,提高系統(tǒng)的無差度,當積分環(huán)節(jié)過大時會產(chǎn)生振蕩; 微分環(huán)節(jié):能反映偏差信號的變化趨勢,并能在偏差信號的值變得太大之前,在系統(tǒng)中引入一個有效的早期修正信號,從而加快系統(tǒng)的動作速度,減少調(diào)節(jié)時間。 此次實驗只考慮控制擺桿的角度,小車的位置是不受控的,即擺桿角度的單閉環(huán)控制,立起擺桿后,會發(fā)現(xiàn)小車向一個方向運動直到碰到限位信號。那么要使倒立擺穩(wěn)定在固定位置,還需要增加對電機位置的閉環(huán)控制,這就形成了擺桿角度和電機位置的雙閉環(huán)控制。立擺后表現(xiàn)為電機在固定位置左右移動控制擺桿不倒。 3.3.2 PID控制參數(shù)設(shè)計及仿真如圖3.8所示,為PID控制仿真模型。 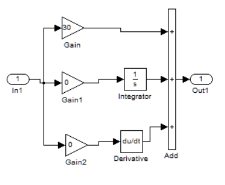 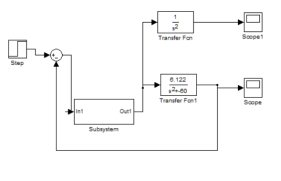
圖3.8 PID仿真模型 如圖3.9所示,可以通過雙擊PID控制模型進行參數(shù)設(shè)置。 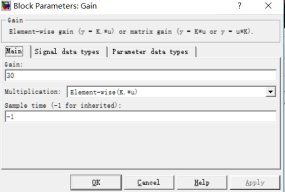
圖3.9 PID參數(shù)設(shè)置 先設(shè)置相關(guān)參數(shù)為 ,得到如圖3.10所示的擺桿角度響應曲線。 ,得到如圖3.10所示的擺桿角度響應曲線。 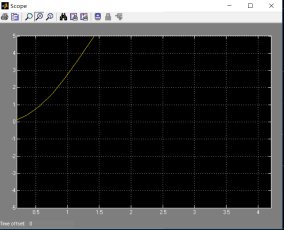
圖3.10 擺桿角度響應曲線 通過調(diào)節(jié)參數(shù),設(shè)置 ,得到圖3.11所示曲線。 ,得到圖3.11所示曲線。 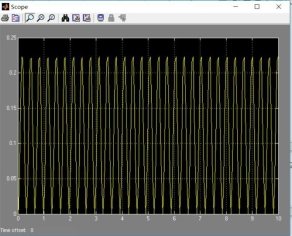
圖3.11 調(diào)整參數(shù)后曲線 從圖中可以看出閉環(huán)控制系統(tǒng)持續(xù)振蕩,應增加微分控制參數(shù),經(jīng)過三個參數(shù)的慢慢調(diào)節(jié),最終設(shè)定參數(shù)為 ,得到如圖3.12所示曲線。 ,得到如圖3.12所示曲線。
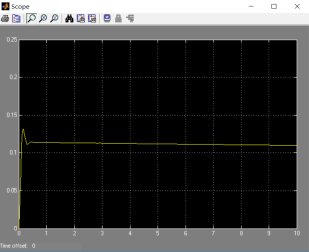
圖3.12 增加微分,積分參數(shù)后曲線圖 可以看出,其在1秒內(nèi)達到平衡,系統(tǒng)穩(wěn)態(tài)誤差比較小,但存在超調(diào)現(xiàn)象。 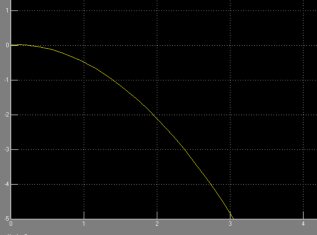
圖3.13 小車位置響應曲線 從圖3.13可得,由于PID控制器為單輸入單輸出系統(tǒng),所以只能控制擺桿的角度,并不能控制小車的位置,所以小車會往一個方向運動,PID控制分析中的最后一段,若是想控制電機的位置,使得倒立擺系統(tǒng)穩(wěn)定在固定位置附近,那么還需要設(shè)計位置PID閉環(huán)。 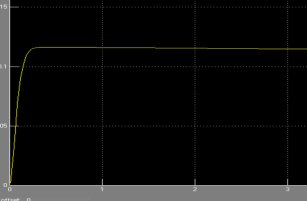
圖3.14 最優(yōu)參數(shù)圖 當設(shè)置參數(shù)為 時得到如圖3.14所示曲線,并取值為本次設(shè)計PID控制的最優(yōu)參數(shù)。 時得到如圖3.14所示曲線,并取值為本次設(shè)計PID控制的最優(yōu)參數(shù)。 PID控制法控制器設(shè)計實物調(diào)節(jié)見附錄2。
第四章 總結(jié)在本次設(shè)計中,發(fā)現(xiàn)直線一級倒立擺本身是不穩(wěn)定的系統(tǒng),但通過數(shù)學建模分析可以建立起小車加速度與擺桿角度間的傳遞函數(shù),然后應用控制理論的方法,借助MATLAB及Simulink軟件,可以分析出系統(tǒng)的特性一級調(diào)節(jié)方向。設(shè)置的參數(shù)調(diào)整時間為0.9s,最大超調(diào)量為25.4%,經(jīng)過計算得出阻尼比和固有頻率,阻尼比與最大超調(diào)量有關(guān),當最大超調(diào)量比較大時,系統(tǒng)穩(wěn)態(tài)誤差較大,在MATLAB中利用計算所得的參數(shù)繪制根軌跡圖和系統(tǒng)階躍響應曲線,分析曲線、系統(tǒng)的穩(wěn)定性。若系統(tǒng)出現(xiàn)超調(diào),則應該調(diào)節(jié)阻尼比,進行重新設(shè)計計算,直到得到最優(yōu)參數(shù)為止。 直線一級倒立擺的校正有三種方式,分別是根軌跡法、頻率法、以及PID調(diào)節(jié)法。通過實際對比發(fā)現(xiàn)PID調(diào)節(jié)法設(shè)計的控制器比較穩(wěn)定,擺桿振蕩小,校正效果好。根軌跡法設(shè)計的控制器與選擇的參數(shù)最大超調(diào)量和調(diào)整時間有關(guān),即最大超調(diào)量越大,系統(tǒng)越不穩(wěn)定,擺桿振蕩大,達到平衡所需的時間多,且擺桿不容易調(diào)整到平衡狀態(tài)。 本次的課程設(shè)計很好的鍛煉了我的動手能力和選擇最優(yōu)參數(shù)方法,了解了自動控制原理這門課程,知道了直線一級倒立擺在科研教學中的重要作用。本次課設(shè)最大的難度在于數(shù)學模型的建立以及最優(yōu)參數(shù)的選擇。我們必須掌握基本概念,才能將選擇到最優(yōu)參數(shù),設(shè)計好控制器。通過不斷地更改參數(shù),繪制根軌跡圖、系統(tǒng)階躍響應圖來分析系統(tǒng)是否達到平衡,若不平衡則需要重新調(diào)整參數(shù)。
附錄1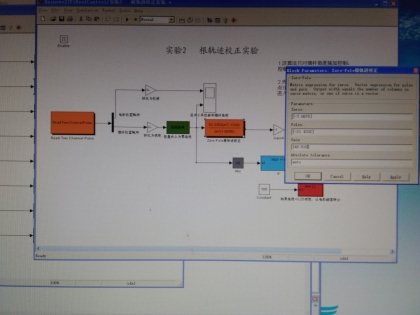
圖附錄1.1 根軌跡法參數(shù)設(shè)置 
圖附錄1.2 根軌跡法實物調(diào)試
附錄2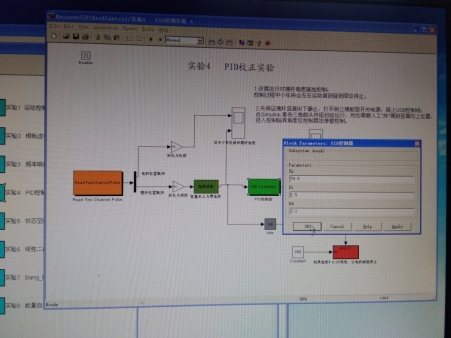
圖附錄2.1 PID控制法參數(shù)設(shè)置
完整的Word格式文檔51黑下載地址:
 自動控制 (1).docx
(1.34 MB, 下載次數(shù): 165)
自動控制 (1).docx
(1.34 MB, 下載次數(shù): 165)
2018-12-19 15:00 上傳
點擊文件名下載附件
下載積分: 黑幣 -5
| 









 QQ好友和群
QQ好友和群 QQ空間
QQ空間 騰訊微博
騰訊微博 騰訊朋友
騰訊朋友 收藏
收藏 淘帖
淘帖 頂
頂 踩
踩
