這是功能完善的由純數電構成的一個出租車計價器,proteus和報告都上傳了
課程設計題目
摘 要:本設計通過采用數字電路對出租車計價器的設計,提出對我們現在日益多起來的出租車的計價器,并對出租車計價器進行了各種設計,首先通過我們總所周知的出租車的狀態分為四種第一種為沒有乘客時,計價器不顯示;第二種出租車行駛的距離并沒有超過起步價距離;第三種行駛距離超過了起步價距離并一直在行駛中;第四種出租車在行駛過程中因為乘客需要而停車等待,對這四種情況的不同方面我們的計價器有不同的運算法則,通過單價模塊、起步價模塊、候時模塊、行駛公里數模塊、加法器模塊、總價計算模塊對這六個模塊分別組合達到我們實現出租車計價的方式。
目錄
1 前言
1.1 設計背景
1.2 設計目標
1.3 實施計劃
2 總體方案設計
2.1 方案概述
2.2 方案論證
3 單元模塊設計
3.1 各單元模塊功能介紹及電路設計
3.1.1 加法器模塊設計
3.1.2 起步價置數模塊設計
3.1.3 單價置數模塊設計
3.1.4 公里計數模塊設計
3.1.5 候時計數模塊設計
3.1.6 總價儲存模塊設計
3.1.7 清零模塊設計
4 主要器件的介紹
4.1 74LS160器件介紹
4.2 74LS245器件介紹
注:1GN對應1A 1Y的四個,同理2GN對應 2A 2Y
5 系統調試
5.1調試環境
6 系統功能、指標參數
6.1 系統能實現的功能
8 總結與體會
9 謝辭
10 參考文獻
附錄
1 前言出租汽車因其方便、快捷已逐步成為人們生活中不可缺少的代步工具。隨著出租汽車行業的迅猛發展,作為結算出租汽車乘客應付費用的計價器已成為人們密切關注的計量儀器。 出租車計價器的設計,和功能的增加、優化和完善成了我們電子設計的重要內容。 掌握出租車計價器的設計是我們必須熟悉和掌握的知識。 熟悉課程設計的流程,也是我們為今后做設計打下堅實的基礎,首先,我們應該明白所設計的電路實現的功能。其次,根據所需功能,進行分析,如何實現該功能和實現該功能的多種方法,還有所需要什么器件。 多次設計,熟能生巧,并且還能熟練課本上所學的知識,將理論和實踐結合起來,加深我們理論學習知識的印象,對我們學習知識起到很大的幫助作用。 1.1 設計背景在學習了數字電路大半學期,掌握了控制器,計數器,加法器,譯碼電路等基本電路和一些常用芯片之后,我們開始完成自主設計的第一個課程設計,出租車計價器系統,并且通過這次設計,達到一個自我提升的目的。 1.2 設計目標- 設計出租車行駛的起步價,起步價可以根據我們出租車所在的具體地方進行修改
- 設計出租車行駛距離在超過我們的起步距離時我們每行駛行駛一公里便需要多少錢。
- 設計行駛距離顯示,與總價單位顯示。
- 設計候時模塊,在等待乘客幾分鐘后我們自動加價的系統。
- 培養數字電路的設計能力。
- 學會用中規模器件設計一個符合要求的系統,并熟悉常用中規模器件的用法。
- 掌握出租車計價器的控制、設計和調試方法,為后續課程《單片機原理與應用》的學習打基礎。
1.3 實施計劃- 通過我們所設計的起步價與每公里行駛距離的單價通過行駛距離的加法器相加來完成我們車租車計價器。
- 用中、小集成電路組成交通信號燈電路并在仿真軟件上進行仿真與調試。
- 畫出各單元電路圖、整機邏輯框圖和邏輯電路圖,寫出設計、實驗總結報告。
2 總體方案設計通過查閱大量相關技術資料,并結合自己的實際知識,我主要提出了一種技術方案來實現系統功能。下面我將首先對這三種方案的組成框圖和實現原理分別進行說明,并分析比較它們的特點,然后闡述我最終選擇方案的原因。 2.1 方案概述方案原理圖如1.4.1所示: 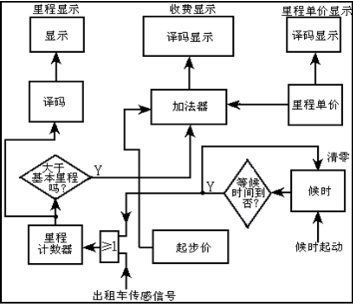
1.4.1 方案一的簡單表述:整個方案由我們的起步價里程單程單價計數所構成當我們出租車搭載到乘客出發時我們的收費顯示會顯示出我們的起步價當我們的出租車經過一段距離超過我們的起步價距離時,則這個時候我們的會交由我們的里程計數器計數,在通過我們的加法器對我們的起步價與單程單價進行加法計算,如每公里行駛扣費3元,這個時候我們的一個CP型號加上去便會隨著我們的計數器進行加法運算使其顯示到我們的收費顯示中去,同時如果圖中我們的乘客需要停車等候我們的計價器也會根據他的等待時間來進行合理的收費并一起送到我們的加法器運算中去一起運算。 2.2 方案論證此方案從我們的設計角度上來說是肯定能夠實驗的,這個方案中我們可以清晰的看到我們的思路,思路簡單設計簡便同時我們的能夠很方便的根據我們的方案設計進行我們的分模塊進行連接,同時有不足的就是我們的設計方案中我們的實驗方案過于繁雜與大部分的模塊銜接的緊密性對我們設計者有很大的挑戰性綜合整個系統,將各個模塊連接起來,組成整個系統。 首先,公里計數器每當傳來一個CP,公里數就加1,當公里數在前4公里時,比較器輸出0,此時起步價端使能,單價呈現高阻態,所以,總價顯示器顯示起步價;當公里數為5的時候,比較器輸出1,此時,起步價呈現高阻態,單價使能,加法器模塊此時將起步價5和單價2相加5+2=7傳到顯示存儲芯片,等待CP到來時傳出到顯示器顯示;當公里數大于5的時候,比較器輸出仍然為1,此時,起步價呈現高阻態,單價使能,加法器將結果和單價相加,沒當CP到來時,拿出去顯示,此時加數也會更新一次。 其次,清零模塊,即將總價、公里數、時間清零,74LS160、74LS273的清零端MR都是異步清零,將清零信號傳入清零端口即可實現清零操作。 3 單元模塊設計本節主要介紹系統各單元模塊的具體功能、電路結構、工作原理、以及各個單元模塊之間的聯接關系;同時本節也會對相關電路中的參數計算、元器件選擇、以及核心器件進行必要說明。 3.1 各單元模塊功能介紹及電路設計本系統主要分為X個單元模塊,它們分別是:加法器模塊、起步價計數模塊、單價置數模塊、公里計數模塊、候時計數模塊、總價存儲模塊、和清零模塊。各單元模塊功能及相關電路的具體說明如下。 3.1.1 加法器模塊設計從以下幾方面進行說明: 加法器模塊主要作用就是將我們的計價器的每公里數的總單價相加。 該模塊由:4個74LS283,以及六個與非門、四個非門、兩個74LS244組成。 加法器的實現需要用到兩片74LS283,一片用于十進制BCD碼相加,另一片用于修正。當相加的結果<=9的時候,結果不需要修正,當結果為10、11、12、13、14、15的時候結果需要加6修正,當結果為16、17、18時也需要加6修正。十位同理,唯一不同的就是需要將個位的進位,接在十位的進位端即可。 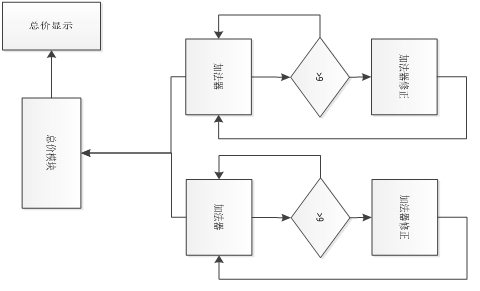
圖1.1.1 4、模塊的具體電路 
圖1.1.2 4個74LS283、2個74LS、6個74LS00、4個74LS04 3.1.2 起步價置數模塊設計從以下幾方面進行說明: 設定下我們的起步價格。 起步價置數需要用兩片74LS244寄存器芯片來存儲起步價的大小,再用兩位BCD碼顯示器7SEG-BCD將起步價顯示出來。使能端用數據選擇器的輸出結果來控制,當里程在5公里內時,使能,當大于5公里時,使能端低電平,輸出無效。
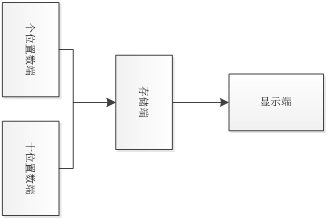
圖1.2.1 4、模塊的具體電路 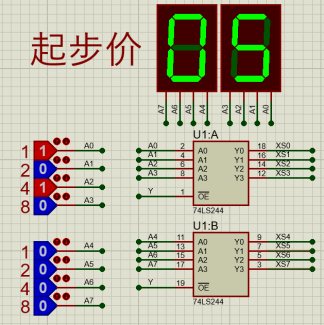
圖1.2.2 5、模塊中相關器件的選擇 八個LOGICTOGGLE邏輯開關、兩個74LS244、兩個二極管顯示器。 3.1.3 單價置數模塊設計從以下幾方面進行說明: 設定我們每公里的單程單價價格。 單價置數需要用兩片74LS244寄存器芯片來存儲起步價的大小,再用兩位BCD碼顯示器7SEG-BCD將起步價顯示出來。使能端用數據選擇器的輸出結果來控制,當里程在5公里內時,使能端低電平,輸出無效,當大于5公里時,使能端高電平,輸出有效。 
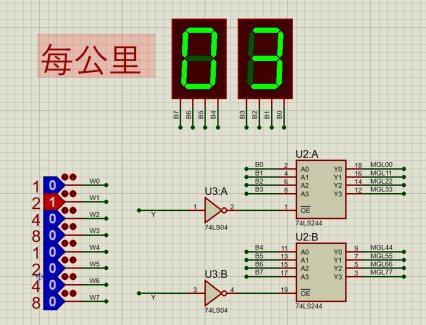
圖1.3.2 八個邏輯開關、兩個74LS244、兩個74LS04、兩個數二極管數字屏 3.1.4 公里計數模塊設計從以下幾方面進行說明: 記錄出租車總共行駛了多少公里。 該模塊用3片74LS160級聯來進行計數,3片74LS160計數脈沖CP用同一個時間脈沖來代替公里傳感器脈沖,來一個CP個位加一,當加到9的時候,個位RCO為1,此時十位的74LS160進入計數狀態當下一個脈沖來時,十位加一,一次類推可以加到最大數999。下面兩篇7485比較器,是用來和起步價的公里數相比,當公里數小于5時,Y=0,當公里數大于等于5時,Y=1。(此處與4比較,是由于,當公里數>=4時,起步價傳入顯示存儲器,顯示屏顯示起步價;當公里數=5時,單價使能,單價傳入加法器,結果已經出來了,5+2=7,但要等到下一個CP來時,顯示存儲器才會拿去顯示,若與5比較,等于5公里時,單價才使能,所得的結果要等到6公里時,即下一個CP來時,才會將7拿出來顯示,這顯然不行;當公里數大于5的時候,來一個CP,顯示加2的結果) 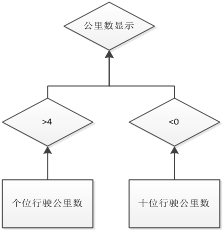
圖1.4.1 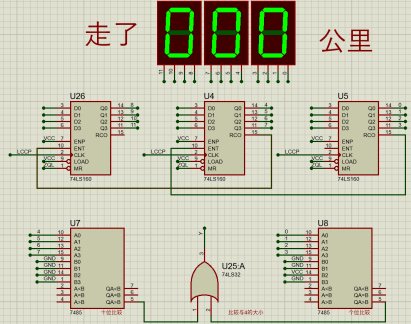
圖1.4.2 5、模塊中相關器件的選擇 三個74LS760、兩個7485、一個74LS32 3.1.5 候時計數模塊設計從以下幾方面進行說明: 在乘客任需要作坐車但不在車上需要車主等待時,我們的候車會進行候車時間的計數并相應的扣除錢。 候時計數模塊和公里計數模塊原理大致相同,主要用到了四片74LS160加法器,秒計數器用秒脈沖充當,用與門將秒計數器十位為六時,產生一個進位脈沖,使得分計數器數值加一,于此同時秒計數器需要用與非門產生清零脈沖,即可實現清零,從而實現十分秒的計時以及顯示。所以即可實現逢60秒進1分,同時,逢60秒秒計數器清零功能。 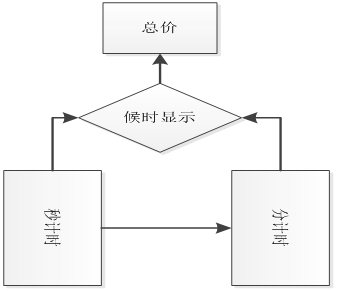
圖1.5.1
4、模塊的具體電路 
圖1.5.2 5、模塊中相關器件的選擇 4個74LS160、2個74LS00、1個74LS04 3.1.6 總價儲存模塊設計從以下幾方面進行說明: 將所有的總價儲存起來,并顯示到屏幕上。 當公里數<=5時,起步價傳入,輸出到顯示屏,并傳入加法器模塊做加數,當公里數大于5時,起步價模塊呈現高阻態,單價模塊使能,每次將所得總價加2,當CP到來時,傳出顯示到顯示屏。 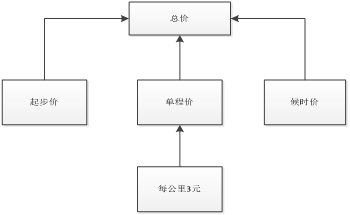
圖1.6.1 4、模塊的具體電路 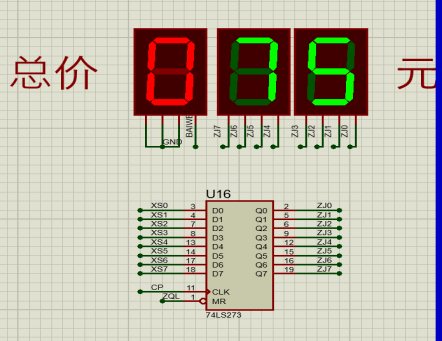
圖1.6.2 5、模塊中相關器件的選擇 1個74LS273、三個數碼二極管 3.1.7 清零模塊設計從以下幾方面進行說明: 對整個出租車計價器進行清零等待下一個乘客。 清零模塊,開關上下端分別接VCC和GND分別接到公里計數模塊74LS160的清零端、候時計數模塊74LS160清零端、總價存儲模塊74LS273清零端,74LS160、74LS273的清零端MR都是異步清零,當開關下打,即低電平的時候則被清零。圖上的74LS08與門是將逢60秒清零和人為發出的清零信號想與,從而達到清零的效果。 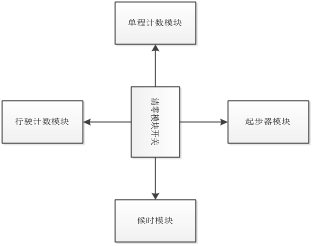
圖1.7.1 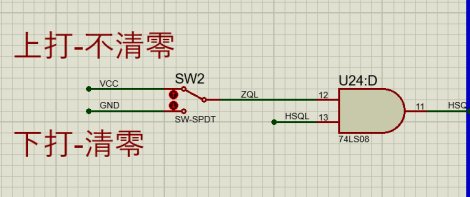
圖1.7.2 5、模塊中相關器件的選擇 1個雙向開關、一個74LS08 4 主要器件的介紹本系統中主要使用了如下一些功能器件:74LS160、74LS245、74LS244、74LS283、7485。下面就這些器件的功能特點、主要參數和使用方法作相應說明。 4.1 74LS160器件介紹從74LS160功能表功能表中可以知道,當清零端CR=“0”,計數器輸出Q3、Q2、Q1、Q0立即為全“0”,這個時候為異步復位功能。當CR=“1”且LD=“0”時,在CP信號上升沿作用后,74LS161輸出端Q3、Q2、Q1、Q0的狀態分別與并行數據輸入端D3,D2,D1,D0的狀態一樣,為同步置數功能。而只有當CR=LD=EP=ET=“1”、CP脈沖上升沿作用后,計數器加1。74LS160還有一個進位輸出端CO,其邏輯關系是CO= Q0·Q1·Q2·Q3·CTT。合理應用計數器的清零功能和置數功能,一片74LS161可以組成16進制以下的任意進制分頻器。 74LS160芯片如圖4.1.1所示 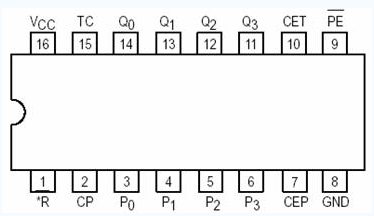
圖4.1.1 74LS162芯片管腳圖介紹:時鐘CP和四個數據輸入端P0~P3、清零/MR、使能CEP,CET、置數PE、數據輸出端Q0~Q3以及進位輸出TC.(TC=Q0·Q1·Q2·Q3·CET)74LS162芯片狀態表
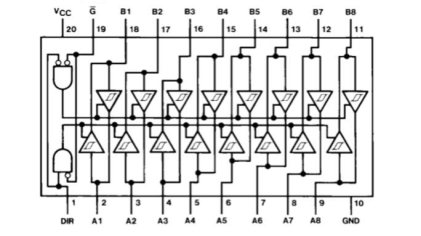
4.2 74LS245器件介紹74LS245是雙向總線驅動器,用來驅動如51單片機的系統總線的。在應用系統中,所有的系統擴展的外圍芯片都需要總線驅動,所以就需要總線驅動器。74ls245引腳及功能: 圖4.2.1 第1腳DIR(T/R),為輸入輸出端口轉換用,DIR=“1”高電平時信號由“A”端輸入“B”端輸出,DIR=“0”低電平時信號由“B”端輸入“A”端輸出。第2~9腳“A”信號輸入輸出端,A0=B0,A7=B7,A0與B0是一組,如果DIR=“1”OE=“0”則A1輸入B1輸出,其它類同。如果DIR=“0”OE=“0”則B1輸入A1輸出,其它類同。第11~18腳“B”信號輸入輸出端,功能與“A”端一樣,不再描述。第19腳OE,使能端,若該腳為“1”A/B端的信號將不導通,只有為“0”時A/B端才被啟用,該腳也就是起到開關的作用。第10腳GND,電源地。第20腳VCC,電源正極。 74LS245是用來驅動LED或者其他的設備,它是8路同相三態雙向總線收發器,可雙向傳輸數據。74LS245還具有雙向三態功能,既可以輸出,也可以輸入數據。如果用C51的P0口輸出到數碼管,那就要考慮到數碼管的亮度以及P0口帶負載的能力,當8051單片機的P0口總線負載達到或超過P0最大負載能力時,必須接入74LS245等總線驅動器。選用74LS245提高驅動能力。P0口的輸出經過74LS245提高驅動后,輸出到數碼管顯示電路。當片選端/CE低電平有效時,DIR=“0”,信號由B向A傳輸;(接收)DIR=“1”,信號由A向B傳輸;(發送)當CE為高電平時,A、B均為高阻態。 4.3 74LS244器件介紹 74LS244為3態8位緩沖器,一般用作總線驅動器。74LS244沒有鎖存的功能。地址鎖存器就是一個暫存器,它根據控制信號的狀態,將總線上地址代碼暫存起來。8086/8088數據和地址總線采用分時復用操作方法,即用同一總線既傳輸數據又傳輸地址引腳介紹 : 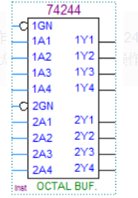 數據引腳 數據引腳
8個數據輸入端,1A1、1A2、1A3、1A4,2A1、2A2、2A3、2A4,(其中1A4和2A4是高位)。8個二進制輸出端1Y1、1Y2、1Y3、1Y4、2Y1、2Y2、2Y3、2Y4,以四位二進制形式輸出。控制引腳兩個控制端1GN、2GN,控制輸出是否為高阻態。 注:1GN對應1A 1Y的四個,同理2GN對應 2A 2Y5 系統調試首先我們對我們的出租車計價器的加法器進行了調試,在我們運用加法器74LS283時加法器出來的結果小于9則不進行加減,當相加的結果<=9的時候,結果不需要修正,當結果為10、11、12、13、14、15的時候結果需要加6修正,當結果為16、17、18時也需要加6修正。其次我們對我們的公里計數器進行了調試來一個CP個位加一,當加到9的時候,個位RCO為1,此時十位的74LS160進入計數狀態當下一個脈沖來時,十位加一,一次類推可以加到最大數999。 5.1調試環境Proteus軟件是英國Lab Center Electronics公司出版的EDA(該軟件中國總代理為廣州風標電子技術有限公司)。它不僅具有其它EDA工具軟件的仿真功能,還能仿真單片機及外圍器件。它是目前比較好的仿真單片機及外圍器件的工具。雖然目前國內推廣剛起步,但已受到單片機愛好者、從事單片機教學的教師、致力于單片機開發應用的科技工作者的青睞。 Proteus是英國著名的EDA工具,從原理圖布圖、代碼調試到單片機與外圍電路協同仿真,一鍵切換到PCB設計,真正實現了從概念到產品的完整設計。是目前世界上唯一將仿真電路軟件、PCB設計軟件和虛擬模型仿真軟件三合一的設計平臺,其處理器模型支持8051、HC11、PIC10/12/16/18/24/30/DsPIC33、AVR、ARM、8086和MSP430等,2010年又增加了Cortex和DSP系列處理器,并持續增加其他系列處理器模型。在編譯方面,它也支持IAR和MATLAB等多種編譯器。 在PROTEUS繪制好原理圖后,調入已編譯好的目標代碼文件:*.HEX,可以在PROTEUS的原理圖中看到模擬的實物運行狀態和過程。 ROTEUS不僅可將許多單片機功能形象化,也可將許多單片機實例運行過程形象化。前者可在相當程度上得到實物演示實驗的效果,后者則是實物演示實驗難以達到的效果。 它的元器件、連接線路等卻和傳統的實驗硬件高度對應。這在相當程度上替代了傳統的單片機實驗教學的功能,例:元器件選擇、電路連接、電路檢測、電路修改、運行結果等。 課程設計、畢業設計是學生走向就業的重要實踐環節。由于PROTEUS提供了實驗室無法相比的大量的元器件庫,提供了修改電路設計的靈活性、提供了實驗室在數量、質量上難以相比的儀表,因而也提供了培養學生實踐精神、創造精神的平臺 隨著科技的發展,"計算機仿真技術"已成為許多設計部門重要的前期設計手段。它具有設計靈活,結果、過程的統一的特點。可使設計時間大為縮短、耗資大為減少,也可降低工程制造的風險。相信在單片機開發應用中PROTEUS也能茯得愈來愈廣泛的應用。 使用Proteus 軟件進行單片機設計,綜合運用,有利于培養學生的電路設計能力及的操作能力;在和全國大學生電子設計競賽中,我們使用 Proteus 對學生進行培訓,在不需要硬件投入的條件下,學生普遍反映,對單片機的學習比單純學習書本知識更容易接受,更容易提高。實踐證明,在使用 Proteus 進行系統仿真開發成功之后再進行實際制作,能極大提高系統設計效率。因此,Proteus 有較高的推廣利用價值。 目前Proteus的最新版為8.7,ARM cortex處理器被增加,在7.10中已經增加DSP系列(TMS320)。
6 系統功能、指標參數1.成功實現起步價的價位。 2.設定沒公里行駛的單價。 3.候時計在工作狀態中的運用得當。 4.加法器的計算參數做到準確無誤。 6.1 系統能實現的功能完全的實現我們出租車在工作中的狀態,能夠在乘客上車時成功打亮起步價,并且能在行駛過程中,通過我們的計價器可以清楚的看到我們出租車在行駛的路程上行駛了有多遠的路程,并且能夠通過我們制定的每公里單價計算出我們出租車總共行駛的單程價格在加上我們的起步價最后將乘客總共需要支付好多錢顯示出來。并能夠成功顯示我們的候車時間。 7 結論 通過這次的出租車計價器的設計中,我也發現自己在對元器件的熟悉程度上有很大的問題,包括不知道怎么選擇什么樣的元器件來完成這個模塊的內容,在完成這個設計報告的過程中,我寫作的速度很慢因為大部分的原件不熟悉加上自己對這個東西的原件的了解不夠深刻,對各個元器件的運用上不夠熟悉,不僅如此在我做仿真過程中也發現了下面幾個容易出錯的地方。 第一個就是在我們對出租車計價器的理解中我們普遍認為的出租車只有兩種情況就是上車一種下車一種,其實我們還忽略了一些,在車上我們開始計時時它就分為兩種:是否行使距離超過我們的起步距離,然后在車上后我們也可能會出現等待乘客的過程所以這個時候需要我們的候車計。 第二個就是我們在做將寄存器上面的接入輸出的數據傳到我們所需要的總價的計數器上面去的時候我們的狀態過程極其容易出錯。 8 總結與體會一個長學期的電路原理,讓我學到了很多東西,從最開始的什么都不懂,到現在的略懂一二。 在學習知識上面,開始的時候完全是老師講什么就做什么,感覺速度還是比較快的,跟理論也沒什么差距。但是后來就覺得越來越麻煩了。從最開始的誤差分析,實驗報告寫了很多,但是真正掌握的確不多,到最后的回轉器,負阻,感覺都是理論沒有很好的跟上實踐,很多情況下是在實驗出現象以后在去想理論。在實驗這門課中給我最大的感受就是,一定要先弄清楚原理,在做實驗,這樣又快又好。 在養成習慣方面,最開始的時候我做實驗都是沒有什么條理,想到哪里就做到哪里。比如說測量三相電,有很多種情況,有中線,無中線,三角形接線法還是Y形接線法,在這個實驗中,如果選擇恰當的順序就可以減少很多接線,做實驗應該要有良好的習慣,應該在做實驗之前想好這個實驗要求什么,有幾個步驟,應該怎么安排才最合理,其實這也映射到做事情,不管做什么事情,應該都要想想目的和過程,這樣才能高效的完成。電原實驗開始的幾周上課時間不是很固定,實驗報告也累計了很多,第一次感覺有那么多實驗報告要寫,在交實驗報告的前一天很多同學都通宵了的,這說明我們都沒有合理的安排好自己的時間,我應該從這件事情中吸取教訓,合理安排自己的時間,完成應該完成的學習任務。這學期做的一些實驗都需要嚴謹的態度。在負阻的實驗中,我和同組的同學連了兩三次才把負阻鏈接好,又浪費時間,又沒有效果,在這個實驗中,有很多線,很容易插錯,所以要特別仔細。 在最后的綜合實驗中,我更是受益匪淺。完整的做出了一個紅外測量角度的儀器,雖然不是特別準確。我和我組員分工合作,各自完成自己的模塊。我負責的是單片機,和數碼顯示電路。這兩塊都是比較簡單的,但是數碼顯示特別需要細致,由于我自己是一個粗心的人,所以數碼管我檢查了很多遍,做了很多無用功。 9 謝辭報告得以完成,要感謝的人實在太多了,首先要感謝毛老師,因為報告是在毛老師的悉心指導下完成的。毛老師的專業知識,嚴謹的治學態度,精益求精的工作作風,誨人不倦的高尚師德,嚴以律己、寬以待人的崇高風范,樸實無華、平易近人的人格魅力對我影響深遠。毛老師指引我的論文的寫作的方向和架構,并對本報告進行逐字批閱,指正出其中錯誤之處,使我有了思考的方向,他的循循善誘的教導和不拘一格的思路給予我無盡的啟迪,他的嚴謹細致、一絲不茍的作風,將一直是我工作、學習中的榜樣。毛老師要指導很多同學的論文,加上本來就有的教學任務,工作量之大可想而知,但在一次次的回稿中,精確到每一個字的批改給了我深刻的影響,使我在論文之外明白了做學問所應有的態度。
論文的順利完成,也離不開其它各位老師、同學和朋友的關心和幫助。在整個的論文寫作中,各位老師、同學和朋友積極的幫助我查資料和提供有利于論文寫作的建議和意見,在他們的幫助下,論文得以不斷的完善,最終幫助我完整的寫完了整個論文。 另外,要感謝在大學期間所有傳授我知識的老師,是你們的悉心教導使我有了良好的知識,這也是論文得以完成的基礎。
通過此次的論文,我學到了很多知識,跨越了傳統方式下的教與學的體制束縛,在論文的寫作過程中,通過查資料和搜集有關的資料,培養了自學能力和動手能力。并且由原先的被動的接受知識轉換為主動的尋求知識,這可以說是學習方法上的一個很大的突破。在以往的傳統的學習模式下,我們可能會記住很多的書本知識,但是通過實驗報告,我們學會了如何將學到的知識轉化為自己的東西,學會了怎么更好的處理知識和實踐相結合的問題。
附錄 附錄1 系統的原理電路圖 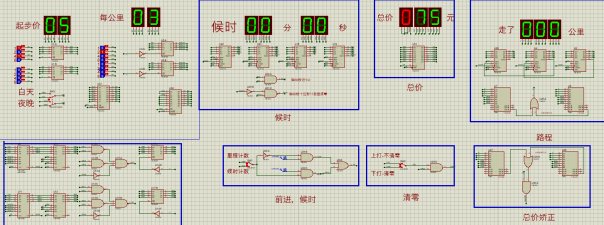

QQ圖片20181218202805.png (13.72 KB, 下載次數: 340)
下載附件
文件
2018-12-18 20:28 上傳
全部資料51hei下載地址:
 Desktop.rar
(797.59 KB, 下載次數: 248)
Desktop.rar
(797.59 KB, 下載次數: 248)
2018-12-18 20:28 上傳
點擊文件名下載附件
仿真和報告 下載積分: 黑幣 -5
| 



 [復制鏈接]
[復制鏈接]






 QQ好友和群
QQ好友和群 QQ空間
QQ空間 騰訊微博
騰訊微博 騰訊朋友
騰訊朋友 收藏
收藏 淘帖
淘帖 頂
頂 踩
踩

