��һ�� ��ͨ������ϵ�y(t��ng)�O(sh��)Ӌ(j��)�ĸ���
ʮ�ֵ��ڵļt�G���ǽ�ͨ��Ҏ(gu��)�ğo(w��)�����˾�C(j��)�����˵��О��(zh��n)�t��ʮ�ֵ��ڵĽ�ͨ�t�G�������DZ��C��ͨ��ȫ�͵�·��ͨ���P(gu��n)�I����(d��ng)ǰ����(gu��)��(n��i)�����(sh��)�������ڲ��á��Ԅ�(d��ng)���t�G��ͨ���������й̶��ġ��t�����G�����D(zhu��n)�Q�g�������Ԅ�(d��ng)�ГQ������һ���ɡ�ͨ���c��ֹ�r(sh��)�g�����@ʾ���t�S�G��ɫ��̖(h��o)���ͷ���ָʾ���������ֽM�ɡ��ڽ�ͨ����ͨ���c��ֹ�r(sh��)�g�����@ʾ�У�ͨ��Ҫô�|�����ϱ��ɷ����50�룻Ҫô����(j��)��ͨҎ(gu��)�ɣ��|������60�룬�ϱ�����40�룬�r(sh��)�g���ƶ��ǹ̶��ġ���ͨ���ĕr(sh��)�g�����@ʾ���Թ̶��r(sh��)�gֵ�A(y��)�ȡ��̻����چ�Ƭ�C(j��)�У�ÿ��ֻ����һ�����ڽ���׃�������ǣ���(sh��)�H�ϲ�ͬ�r(sh��)�̵�܇�v��ͨ��r��ʮ�֏�(f��)�s�ģ��Ǹ߶ȷǾ��Եġ��S�C(j��)�ģ�߀��(j��ng)�����˞����ص�Ӱ푡����ö��r(sh��)���ƽ�(j��ng)����ɵ�·��Ч��(y��ng)�Õr(sh��)�g�����M(f��i)�����F(xi��n)�G������܇�v�^�٣��t������܇�v�e���������(d��ng)ǰ��·�Ͻ�ͨ܇�v��(sh��)�Č�(sh��)�H��r׃����������ȱ�ݾ����ڮ�(d��ng)·�r�l(f��)��׃���r(sh��)�����ܝM��˾�C(j��)�c·�˵Č�(sh��)�H��Ҫ���p����ɕr(sh��)�g�ϵ����M(f��i)������ֱ�ӌ�(d��o)�½�ͨ��������(d��o)�³��н�ͨЧ�ʵ��½��� Ŀǰ����һ�Nʹ�á�ģ�����ơ����g(sh��)���ƽ�ͨ���ķ������܉����(j��)ʮ��·�ڃɂ�(g��)������܇�v��(d��ng)�B(t��i)��r���Ԅ�(d��ng)�Д�t�G���r(sh��)�g�g�����Ա��C���܇�������p�ٵ��ڵĽ�ͨ���������Džs���r(sh��)���ƣ����Ô�(sh��)���@ʾ���@ʾ��(d��ng)ǰ��ɫʣ���r(sh��)�g���Ա����{�T�S�r(sh��)�����Լ����{��(d��ng)�������r(sh��)ͣ܇��(d��ng)��
�ڶ��� ��ͨ�����Ƶ������O(sh��)Ӌ(j��)
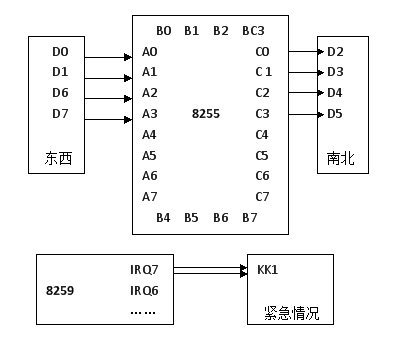
�O(sh��)Ӌ(j��)��ʹ����8259�Д��������8255A�ɾ��̲��нӿڌ�(sh��)�F(xi��n)�ˣ���(du��)�ϱ����|������ͨ�ķքeӋ(j��)�r(sh��)���քe���ƣ��O(sh��)Ӌ(j��)���ö��r(sh��)���Д���Ƶķ�ʽ�M(j��n)��,��(du��)�ɂ�(g��)����܇�v��ͨ�Еr(sh��)�g�քeӋ(j��)�r(sh��),���S���M(j��n)�и����p���ͨ�Еr(sh��)�g��
����ʮ�ֽ���·�ڼt�G������ϵ�y(t��ng)��Ҫؓ(f��)؟(z��)���Ɩ|��������ϱ�����ļt�G���Ġ�B(t��i)���D(zhu��n)�Q���,�P(gu��n)�I�Ǹ���(g��)��B(t��i)֮�g���D(zhu��n)�Q���M(j��n)���m��(d��ng)?sh��)ĕr(sh��)�g�ӕr(sh��),���ǻ������Ͽ��],���������O(sh��)Ӌ(j��):
1���|������܇�v����60��犡����|������G�����ϱ�����ļt��ͬ�r(sh��)�c(di��n)��1��犣�
2��1��犺|������ļt���G�����W�q5��犣��Ծ�ʾ܇�v���ГQ�t�G�����˕r(sh��)�ϱ������ԾS�ּt���c(di��n)����
3���|������ļt���G�����W�q5��犺��D(zhu��n)���ϱ��������60��犡����|������ļt�����ϱ�����ľG��ͬ�r(sh��)�c(di��n)��60��犣�
4���ϱ��������60��犺��D(zhu��n)���ϱ�����ļt���G�����W�q5��犣��Ծ�ʾ���ГQ�t�G�����˕r(sh��)�|�������ԾS�ּt���c(di��n)����
5���ϱ�����ļt���G�����W�q5��犺��D(zhu��n)��|���������1��犡����ѭ�h(hu��n)�؏�(f��)��
������ ��ͨ����Ӳ���O(sh��)Ӌ(j��)
3.1�·ԭ��
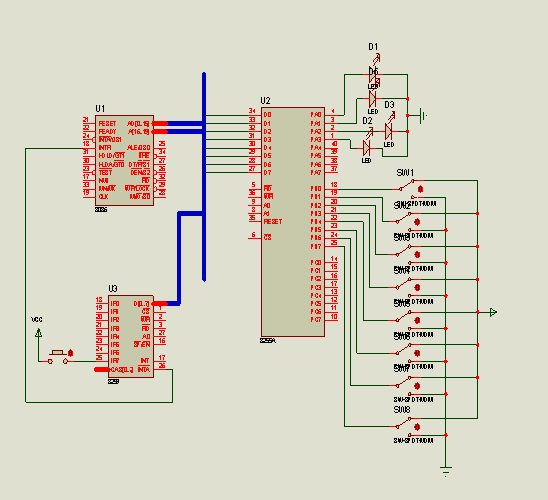
���n�}���O(sh��)Ӌ(j��)��ͨ�^��(sh��)�(y��n)ƽ�_(t��i)�ϵ�һЩ����ģ�K�·�M�ɣ����ڸ�ģ�K�·��(n��i)���ѽ�(j��ng)�B�ӣ��Ñ���ʹ�Õr(sh��)ֻҪ�O(sh��)Ӌ(j��)ģ�K�g�·���B�ӣ���ˣ�Ӳ���·���O(sh��)Ӌ(j��)����(sh��)�F(xi��n)����(du��)��(ji��n)�Ρ�����ϵ�y(t��ng)��Ӳ���B����D1��ʾ��Ӳ���·��R-S�|�l(f��)���·���l(f��)����O��ģ�K��8255�ɾ��̲��нӿ�ģ�K�;o���Д�ģ�K8259�M�ɡ�
��(sh��)�(y��n)�Č�(du��)��(y��ng)�Ӿ��P(gu��n)�Dϵ�D������ʾ��
3.2.ϵ�y(t��ng)ԭ��
3.2��1 8259A�Ĺ���ԭ��
1����(sh��)��(j��)�������_��:8259A�cϵ�y(t��ng)��(sh��)��(j��)�����Ľӿڣ���8λ�p�����B(t��i)���_����CPU�c8259A֮�g�Ŀ���������Ϣ����B(t��i)��Ϣ�Լ��Д������Ϣ������ͨ�^���_�����͵ġ�
2���x/������߉:CPUͨ�^����(sh��)�F(xi��n)��(du��)8259A���x/��������
3����(j��)�B���_��:���Ԍ�(sh��)�F(xi��n)8259AоƬ֮�g�ļ�(j��)�B��ʹ���Д�Դ������8��(j��)�U(ku��)չ��64��(j��)��
4������߉�·:��(du��)����(g��)оƬ��(n��i)���������Ĺ����M(j��n)�Ѕf(xi��)�{(di��o)�Ϳ��ơ�
5���Д�Ո(q��ng)��Ĵ���IRR:8λ�����Էքe����8��(g��)�Д�Ո(q��ng)����̖(h��o)����(d��ng)푑�(y��ng)���Д�Ո(q��ng)��ݔ���_���Д�Ո(q��ng)��r(sh��)��ԓ�Ĵ���������(y��ng)λ��1��
6���Д����μĴ���IMR:8λ������(y��ng)λ���Ԍ�(du��)8��(g��)�Д�Դ���Д�Ո(q��ng)����̖(h��o)�M(j��n)�����ο��ơ���(d��ng)����ijλ�á�0���r(sh��)���t����(y��ng)���Д�Ո(q��ng)�������CPU�������t������(y��ng)���Д�Ո(q��ng)�����Σ��������S��CPU����Д�Ո(q��ng)��ԓ�Ĵ����ă�(n��i)�ݞ�8259A�IJ���������OCW1�������ɳ����O(sh��)�û��׃��
7���Д����(w��)�Ĵ���ISR:8λ����(d��ng)CPU����̎��ij��(g��)�Д�Դ���Д�Ո(q��ng)��r(sh��)��ISR�Ĵ����е�����(y��ng)λ��1��
8�����Ա��^����̎�����Д�̈́����M(j��n)����Д�Ո(q��ng)��֮�g�ă�(y��u)�ȼ�(j��)�e���ԛQ���Ƿ�a(ch��n)�������Д���Д�Ƕ�ס�
3.2��2 8255A�Ĺ���ԭ��
1��8255A�ă�(n��i)���Y(ji��)��(g��u):
1)��(sh��)��(j��)�������_��:�@��һ��(g��)�p�����B(t��i)��8λ��(sh��)��(j��)���_��������8255A�c�C(j��)ϵ�y(t��ng)��(sh��)��(j��)�����Ľӿڡ�ݔ��ݔ���Ĕ�(sh��)��(j��)��CPUݔ���Ŀ������Լ�CPUݔ��Ġ�B(t��i)��Ϣ����ͨ�^�@��(g��)���_�����͵ġ�
2)����(g��)�˿�A��B��C:A�˿ڰ���һ��(g��)8λ��(sh��)��(j��)ݔ���i�����;��_����һ��(g��)8λ��(sh��)��(j��)ݔ���i������B�˿ڰ���һ��(g��)8λ��(sh��)��(j��)ݔ��/ݔ���i�����;��_����һ��(g��)8λ��(sh��)��(j��)ݔ�뾏�_����C�˿ڰ���һ��(g��)8λ��(sh��)��(j��)ݔ���i�����;��_����һ��(g��)8λ��(sh��)��(j��)ݔ�뾏�_��(ݔ��]���i����)��
3) A�M��B�M�����·:�@�ǃɽM����(j��)CPUݔ���Ŀ����ֿ���8255������ʽ���·��������(du��)��CPU���ԣ�����һ��(g��)�˿ڵ�ַ��ͬ�Ŀ����ּĴ���������CPUݔ����һ�ֹ�(ji��)��ʽ�����ֻ�?q��)�C�ڰ�λ��(f��)λ�������ʽ�����ֵĸ�5λ�Q��A�M�Ĺ�����ʽ����3λ�Q��B�M�Ĺ�����ʽ����(du��)C�ڰ�λ��(f��)λ�����ֿɌ�(du��)C�ڵ�ÿһλ��(sh��)�F(xi��n)��λ���(f��)λ��A�M�����·����A�ں�C���ϰ벿��B�M�����·����B�ں�C���°벿��
4)�x������߉:�Á�(l��i)���ư�CPUݔ���Ŀ����ֻ�(sh��)��(j��)��������(y��ng)�˿ڣ�Ҳ������(l��i)���ưѠ�B(t��i)��Ϣ��ݔ�딵(sh��)��(j��)ͨ�^����(y��ng)�Ķ˿��͵�CPU��
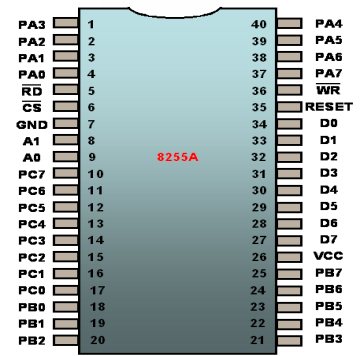
2�����_��̖(h��o)
8255A�����_��D7.5��ʾ���֞锵(sh��)��(j��)������ַ�����x/�����ƾ���ݔ��/ݔ���˿ھ����Դ����
D7��D0��data bus�������B(t��i)���p��(sh��)��(j��)�����cCPU��(sh��)��(j��)�����B�ӣ��Á�(l��i)���͔�(sh��)��(j��)��
��chip select����Ƭ�x��̖(h��o)�������ƽ��Ч�r(sh��)��оƬ���x�С�
A1, A0��port address������ַ�����Á�(l��i)�x���(n��i)���˿ڡ�
��read�����x����̖(h��o)�������ƽ��Ч�r(sh��)�����S��(sh��)��(j��)�x����
��write����������̖(h��o)�������ƽ��Ч�r(sh��)�����S��(sh��)��(j��)���롣
RESET��reset)����(f��)λ��̖(h��o)�������ƽ��Ч�r(sh��)��
�����Ѓ�(n��i)���Ĵ������������ƼĴ�������0��
PA7��PA0��port A����A��ݔ��/ݔ����̖(h��o)����
PB7��PB0��port B����B��ݔ��/ݔ����̖(h��o)����
PC7��PC0��port C����C��ݔ��/ݔ����̖(h��o)����
VCC����5V�Դ�� GND���Դ�ؾ���
3��8255A�� ������ʽ:
��ʽ0---����ݔ��ݔ����ʽ��
��ʽ1---�xͨݔ��ݔ����ʽ��
��ʽ2---�p���xͨݔ��ݔ����ʽ��
3.3 ����ԭ��
��ͨ������ϵ�y(t��ng)�������̈D
������ ��ͨ������ϵ�y(t��ng)��ܛ���O(sh��)Ӌ(j��)
4.1����ͨ������ϵ�y(t��ng)��Դ����





 ����TQQ:125739409;���g(sh��)����QQȺ281945664
����TQQ:125739409;���g(sh��)����QQȺ281945664







 QQ���Ѻ�Ⱥ
QQ���Ѻ�Ⱥ QQ���g
QQ���g �vӍ��
�vӍ�� �vӍ����
�vӍ���� �ղ�
�ղ� ����
���� �
� ��
��