ǰ�Εr(sh��)�g��RoboMaster�C(j��)���˴�ِ���Ų����˶��M(j��n)���˻����ٵ��˽⣬���^(gu��)�@�N�C(j��)���˵�݆̥�ƺ��L(zh��ng)�����c(di��n)��֡�
�@�N݆̥����(hu��)����܇�ǘ��D(zhu��n)��s�܉�ِ��(ch��ng)�ϵęC(j��)���˳�������(g��)�����Ƅ�(d��ng)�������҂��́�(l��i)�f(shu��)�f(shu��)�@�N����ġ����˼{ķ݆����

�䌍(sh��)�@ƪ�����ǃ���ǰһλ֪���W(w��ng)�ѡ����L(zh��ng)���l(f��)���ģ�ԭ�����Q�ǡ����W(xu��)�����������B(y��ng)�����˼{ķ݆�\Մ��������߀����һ��Сҕ�l��ֻ����ҕ�l���@���˼{ķ݆�ώ�����ӡ�������҂���(l��i)�����@λ�����L(zh��ng)���ǿ����@�����˼{ķ݆���ġ���
�ȿ�ҕ�l��
ʲô�����˼{ķ݆

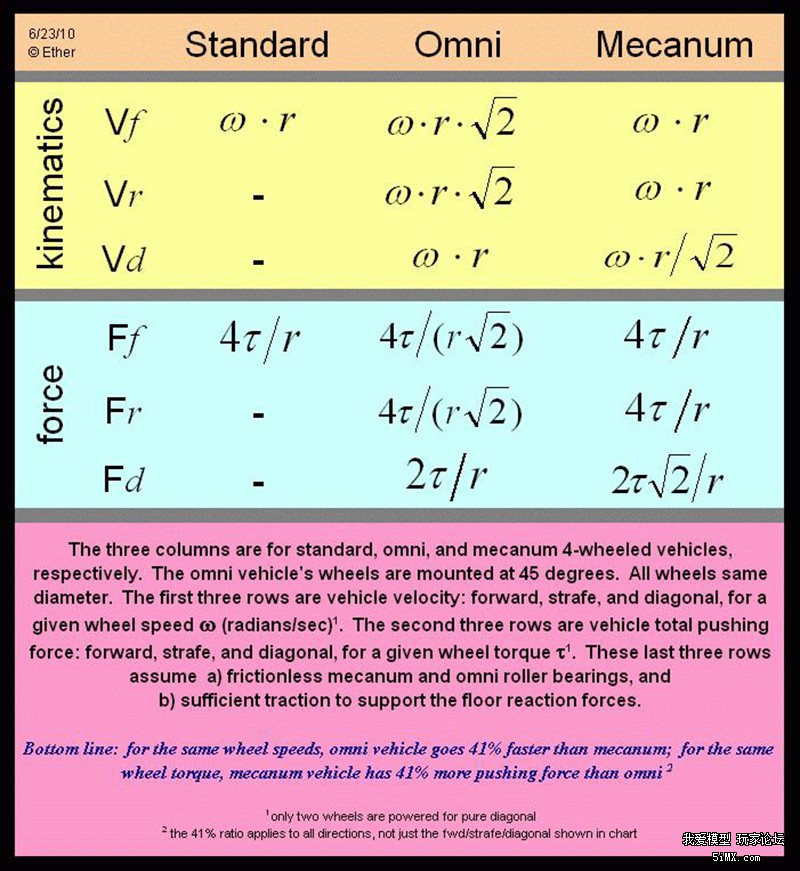
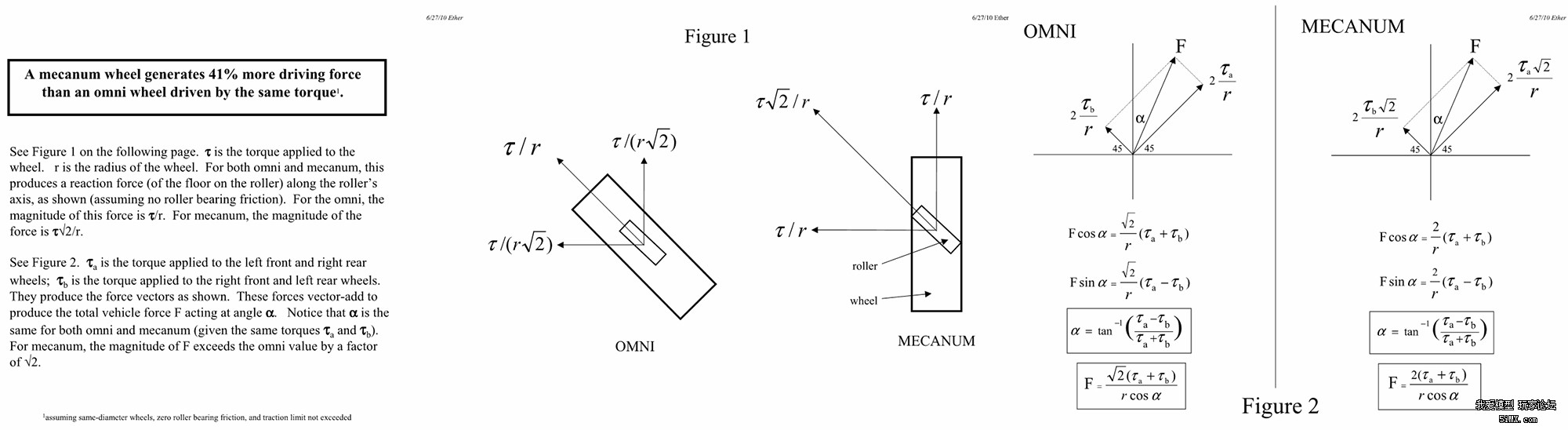
�ڸ�(j��ng)ِ�C(j��)���˺�����N�C(j��)�����У�ȫ���Ƅ�(d��ng)��(j��ng)����һ��(g��)����Ĺ��ܡ���ȫ���Ƅ�(d��ng)����ζ��������ƽ���(n��i)�������ⷽ��ƽ��ͬ�r(sh��)���D(zhu��n)�Ą�(d��ng)�������ˌ�(sh��)�F(xi��n)ȫ���Ƅ�(d��ng)��һ��C(j��)���˕�(hu��)ʹ�á�ȫ��݆����Omni Wheel�������˼{ķ݆����Mecanum Wheel���@�ɷN����݆�ӡ�
ȫ��݆

���˼{ķ݆
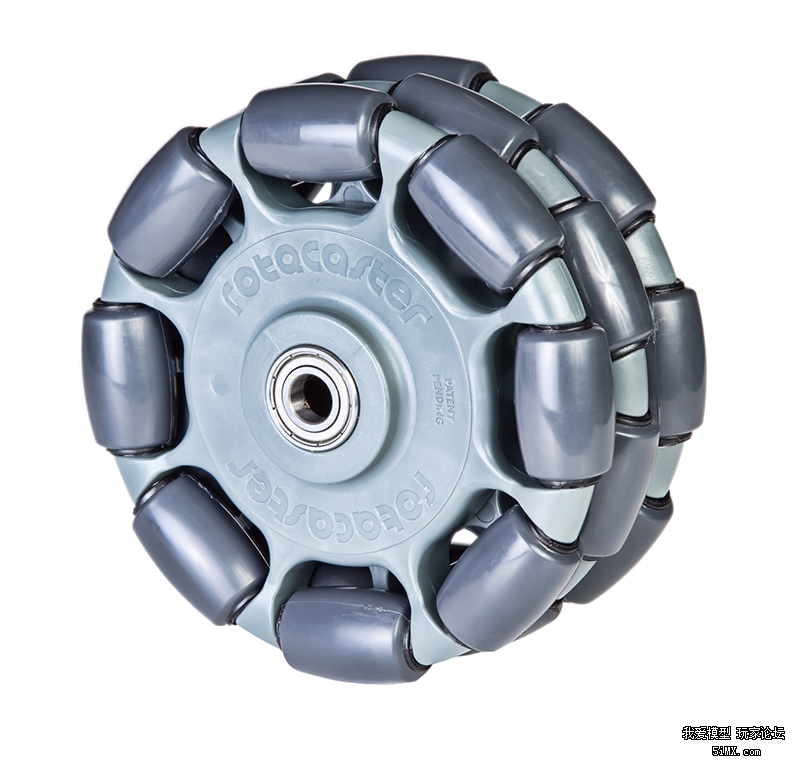
ȫ��݆�c���˼{ķ݆�Ĺ�ͬ�c(di��n)�����������ɃɴֽM�ɣ�݆ݞ��݁?zh��n)ӣ�roller����݆ݞ������(g��)݆�ӵ����w֧�ܣ�݁?zh��n)ӄt�ǰ��b��݆ݞ�ϵĹĠ��ȫ��݆�� ݆ݞ�S�c݁?zh��n)��D(zhu��n)�S���ֱ�������˼{ķ݆��݆ݞ�S�c݁?zh��n)��D(zhu��n)�S�� 45�� �ǡ���Փ�ϣ��@��(g��)�A�ǿ���������ֵ������(j��)��ͬ�ĊA�ǿ�����������ͬ��݆�ӣ�����õ�߀���@�ɷN��
ȫ��݆�c���˼{ķ݆�����º�(ji��n)�Q����݆�����ڽY(ji��)��(g��u)�����W(xu��)���ԡ��\(y��n)��(d��ng)�W(xu��)�����϶��в���䱾�|(zh��)ԭ����݆ݞ�S�c݁?zh��n)��D(zhu��n)�S�ĽǶȲ�ͬ����(j��ng)�^(gu��)���������ߵ��\(y��n)��(d��ng)�W(xu��)�����W(xu��)���ԅ^(q��)�e����ͨ�^(gu��)��������(l��i)�w�F(xi��n)��
Ӌ(j��)���^(gu��)�����ψD��ʾ�������������W(xu��)�Կ��c(di��n)�_(k��i)��D�(y��n)�㡣
�� ���(l��i)����݆�đ�(y��ng)����u���࣬�e���� Robocon��FRC �șC(j��)����ِ���ϡ��@����?y��n)����˼{ķ݆��������y(t��ng)݆��һ�ӣ����b���ƽ�е��S�ϡ�������ʹ��ȫ��݆�����ƵĹ��ܣ��ׂ�(g��)݆ݞ�S֮�g�ĽǶȾͱ���� 60�㣬90�� �� 120�� �ȽǶȣ��@�ӵĽǶ����a(ch��n)����������(l��i)���^�韩��
 �����S��I(y��)ȫ���Ƅ�(d��ng)ƽ�_(t��i)����ʹ�����˼{ķ݆������ȫ��݆�������@��(g��)��(gu��)�a(ch��n)�IJ�܇�� ȫ���Ƅ�(d��ng)ƽ�_(t��i) ���˼{ķ݆��܇ ����˹��܇��
����һ��(g��)ԭ��������݆�����ͱ�ȫ��݆Ҫ���ŵö࣬������(l��i)��һ�N�����X(ju��)���ĸ��X(ju��)����
 �Ĵ_����һ�ο�����݆�\(y��n)�D(zhu��n)����(l��i)�������˶���(hu��)�@�@������ҕ�lֱ�^���f(shu��)������݆�ױP��ƽ�ƺ����D(zhu��n)�r(sh��)��݆�����D(zhu��n)����
���˼{ķ݆����ԭ��
��݆�İ��b����
��݆һ�����Ă�(g��)һ�Mʹ�ã��ɂ�(g��)����݆���ɂ�(g��)����݆������݆������݆�����Ԍ�(du��)�Q���^(q��)�e���D�� �� �b��ʽ�ж�N����Ҫ�֞飺X-�����Σ�X-square����X-�L(zh��ng)���Σ�X-rectangle����O-�����Σ�O-square����O-�L(zh��ng)���Σ�O- rectangle�������� X �� O ��ʾ�����c�Ă�(g��)݆�ӵ�����|��݁?zh��n)����γɵĈD�Σ��������c�L(zh��ng)����ָ�����Ă�(g��)݆���c������|�c(di��n)�����ɵ��Π
 X-�����Σ�݆���D(zhu��n)��(d��ng)�a(ch��n)�������ؕ�(hu��)��(j��ng)�^(gu��)ͬһ��(g��)�c(di��n)������ yaw �S�o(w��)������(d��ng)���D(zhu��n)��Ҳ�o(w��)������(d��ng)���� yaw �S�ĽǶȡ�һ�������(hu��)ʹ���@�N���b��ʽ��
X-�L(zh��ng)���Σ�݆���D(zhu��n)��(d��ng)���Ԯa(ch��n)�� yaw �S�D(zhu��n)��(d��ng)���أ����D(zhu��n)��(d��ng)���ص�����һ���(hu��)���^�̡��@�N���b��ʽҲ����Ҋ(ji��n)��
O-�����Σ��Ă�(g��)݆��λ�������ε��Ă�(g��)��c(di��n)��ƽ�ƺ����D(zhu��n)���](m��i)���κΆ�(w��n)�}�������ڙC(j��)���˵ױP���Π�ߴ�����أ��@�N���b��ʽ�mȻ���룬��������������
O-�L(zh��ng)���Σ�݆���D(zhu��n)��(d��ng)���Ԯa(ch��n)�� yaw �S�D(zhu��n)��(d��ng)���أ������D(zhu��n)��(d��ng)���ص�����Ҳ���^�L(zh��ng)�����Ҋ(ji��n)�İ��b��ʽ��
��݆�ױP�������\(y��n)��(d��ng)�W(xu��)ģ��
��O(sh��)-�L(zh��ng)���εİ��b��ʽ�������Ă�(g��)݆�ӵ������c(di��n)�γ�һ��(g��)���Ρ����\(y��n)��(d��ng)�W(xu��)ģ�ͣ�forward kinematic model�����õ�һϵ�й�ʽ���҂�����ͨ�^(gu��)�Ă�(g��)݆�ӵ��ٶȣ�Ӌ(j��)����ױP���\(y��n)��(d��ng)��B(t��i)�������\(y��n)��(d��ng)�W(xu��)ģ�ͣ�inverse kinematic model���õ��Ĺ�ʽ�t�ǿ��Ը���(j��)�ױP���\(y��n)��(d��ng)��B(t��i)������Ă�(g��)݆�ӵ��ٶȡ���Ҫע����ǣ��ױP���\(y��n)��(d��ng)����������(g��)��(d��)��׃����(l��i)������X�Sƽ��(d��ng)��Y�Sƽ��(d��ng)�� yaw �S���D(zhu��n)�����Ă�(g��)��݆���ٶ�Ҳ�����Ă�(g��)��(d��)����늙C(j��)�ṩ�ġ������Ă�(g��)��݆�ĺ����ٶ��Ǵ���ij�N�s���P(gu��n)ϵ�ģ����\(y��n)��(d��ng)�W(xu��)���Եõ�Ψһ�⣬�����\(y��n)��(d��ng)�W(xu��)�в������@��(g��)�s���P(gu��n)ϵ�ķ��̌��o(w��)�⡣
��ԇ�D��(g��u)�����\(y��n)��(d��ng)�W(xu��)ģ�ͣ�������݆�ױP�Ĕ�(sh��)�W(xu��)ģ�ͱ��^��(f��)�s���҂�?c��)ڴ˷��IJ��M(j��n)�У�
�ٌ��ױP���\(y��n)��(d��ng)�ֽ������(g��)��(d��)��׃����(l��i)������
�ڸ���(j��)��һ���ĽY(ji��)����Ӌ(j��)���ÿ��(g��)݆���S��λ�õ��ٶȣ�
�۸���(j��)�ڶ����ĽY(ji��)����Ӌ(j��)���ÿ��(g��)݆���c������|��݁?zh��n)ӵ��ٶȣ?br />
�ܸ���(j��)�������ĽY(ji��)����Ӌ(j��)���݆�ӵ��挍(sh��)�D(zhu��n)�١�
һ���ױP�\(y��n)��(d��ng)�ķֽ�
�҂�֪�������w��ƽ���(n��i)���\(y��n)��(d��ng)���Էֽ������(g��)��(d��)��������X�Sƽ��(d��ng)��Y�Sƽ��(d��ng)��yaw �S���D(zhu��n)�����D��ʾ���ױP���\(y��n)��(d��ng)Ҳ���Էֽ������(g��)����
 ��ʾ X �S�\(y��n)��(d��ng)���ٶȣ������ҷ����x���Ҟ����� ��ʾ X �S�\(y��n)��(d��ng)���ٶȣ������ҷ����x���Ҟ�����
 ��ʾ Y �S�\(y��n)��(d��ng)���ٶȣ���ǰ�����x��ǰ������ ��ʾ Y �S�\(y��n)��(d��ng)���ٶȣ���ǰ�����x��ǰ������
 �ұ�ʾ yaw �S���D(zhu��n)�Ľ��ٶȣ����x��r(sh��)ᘞ����� �ұ�ʾ yaw �S���D(zhu��n)�Ľ��ٶȣ����x��r(sh��)ᘞ�����
 ��������(g��)��һ�㶼ҕ���Ă�(g��)݆�ӵĎ����ģ����εČ�(du��)�Ǿ����c(di��n)�����ٶȡ�
����Ӌ(j��)���݆���S��λ�õ��ٶ�
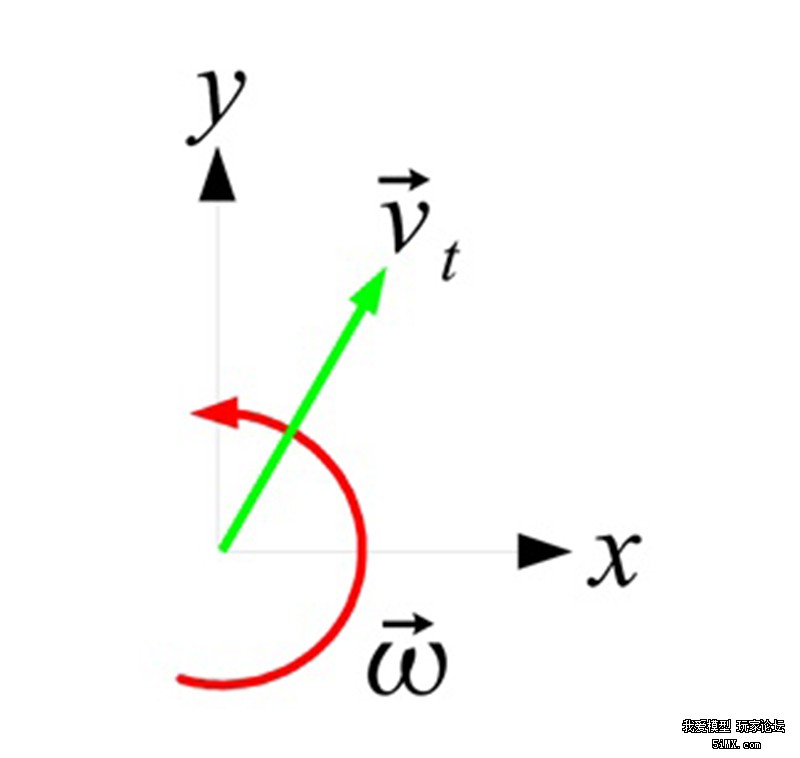
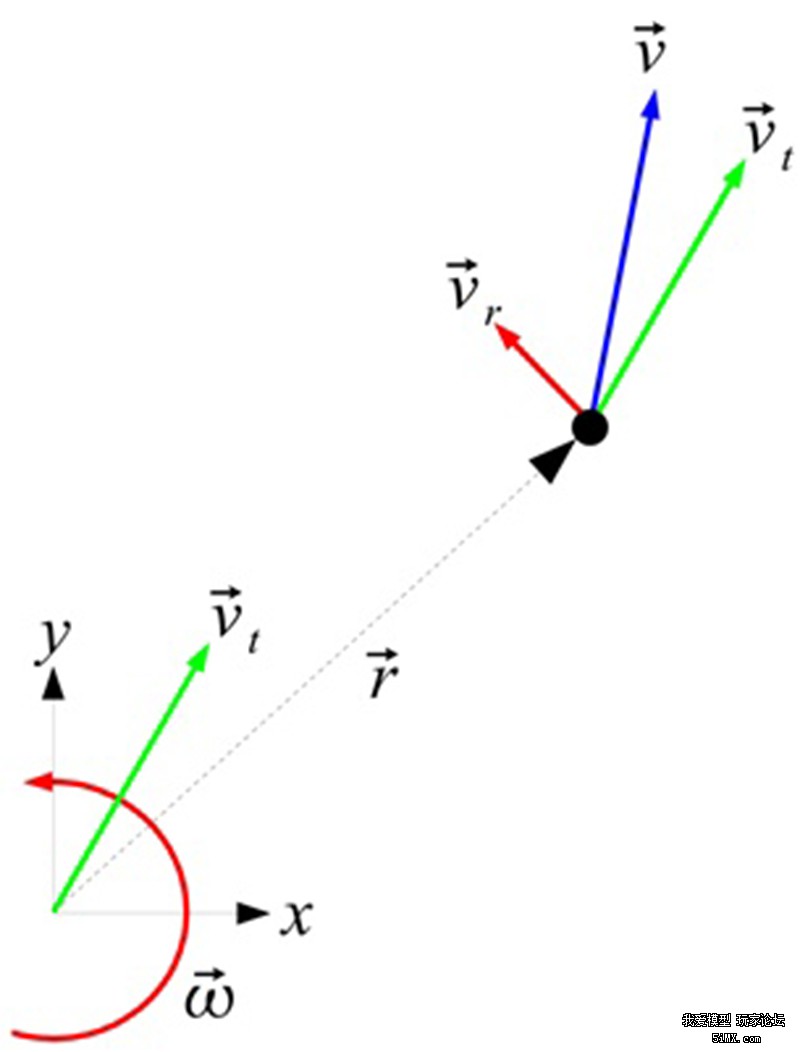
���x��
 ��Ď�����ָ��݆���S�ĵ�ʸ���� ��Ď�����ָ��݆���S�ĵ�ʸ����
 ��݆���S�ĵ��\(y��n)��(d��ng)�ٶ�ʸ���� ��݆���S�ĵ��\(y��n)��(d��ng)�ٶ�ʸ����
 ��݆���S���ش�ֱ�� \vec{r} �ķ����о������ٶȷ����� ��݆���S���ش�ֱ�� \vec{r} �ķ����о������ٶȷ�����
��ô����Ӌ(j��)�����
�քeӋ(j��)�� X��Y �S�ķ����飺
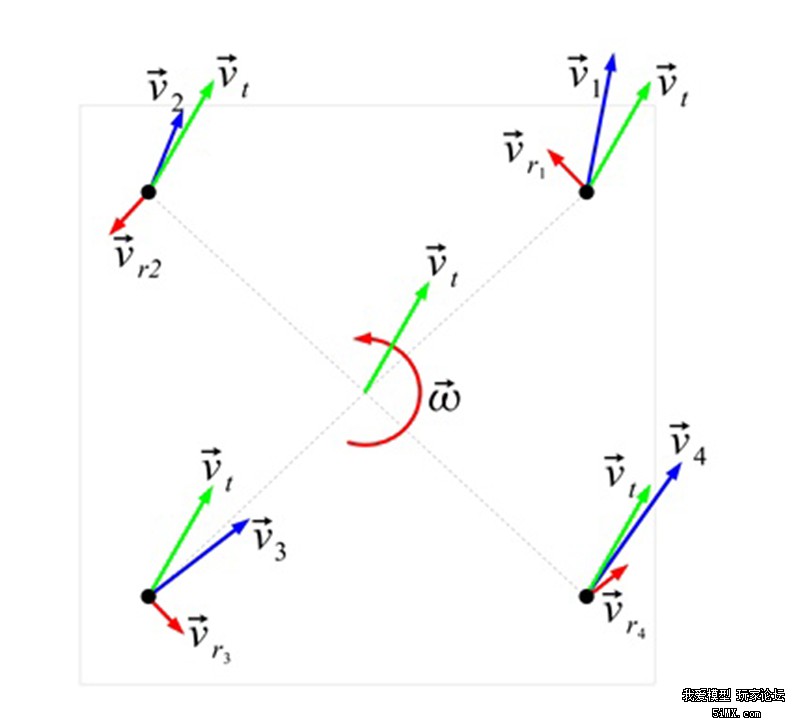
ͬ�����������������(g��)݆���S�ĵ��ٶȡ�
����Ӌ(j��)��݁?zh��n)ӵ��ٶ?/font>
����(j��)݆���S�ĵ��ٶȣ����Էֽ����݁?zh��n)ӷ�����ٶ?img id="aimg_cW96Z" onclick="zoom(this, this.src, 0, 0, 0)" class="zoom" width="19" height="31" src="http://c.51hei.com/a/huq/a/a/0/17_files/equation_014.svg" border="0" alt="" />�ʹ�ֱ��݁?zh��n)ӷ�����ٶ?img id="aimg_ngW9G" onclick="zoom(this, this.src, 0, 0, 0)" class="zoom" width="21" height="27" src="http://c.51hei.com/a/huq/a/a/0/17_files/equation_005.svg" border="0" alt="" />������ �ǿ��ԟo(w��)ҕ�ģ�˼���}����ʲô��ֱ������ٶȿ��ԟo(w��)ҕ�������� �ǿ��ԟo(w��)ҕ�ģ�˼���}����ʲô��ֱ������ٶȿ��ԟo(w��)ҕ��������
���� ����݁?zh��n)ӷ���Ć�λʸ���?/font> ����݁?zh��n)ӷ���Ć�λʸ���?/font>
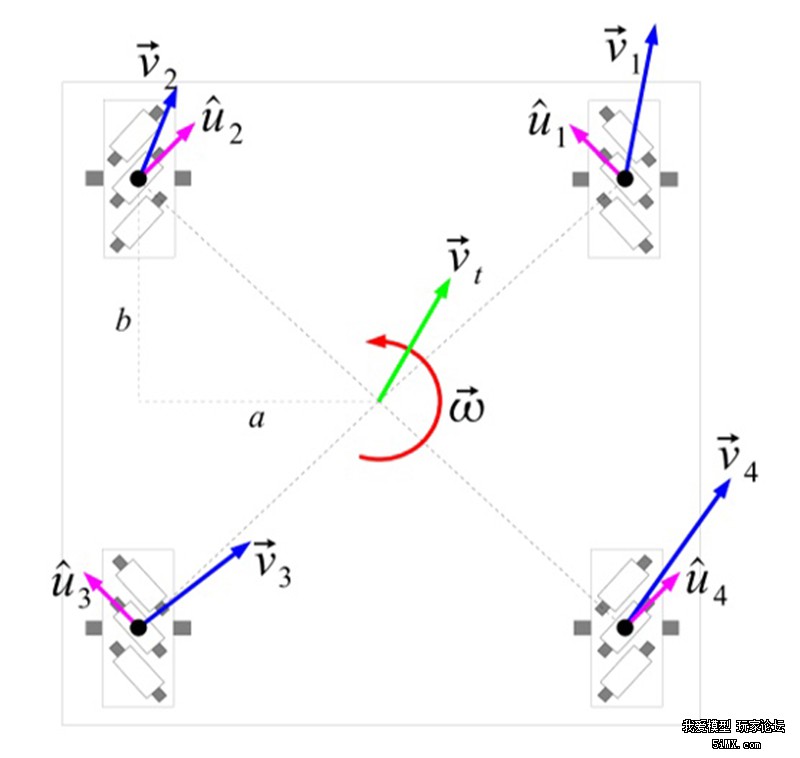
�ġ�Ӌ(j��)��݆�ӵ��ٶ�
��݁?zh��n)��ٶȵ�݆���D(zhu��n)�ٵ�Ӌ(j��)����^��(ji��n)�Σ�
����(j��)�ψD��ʾ�� a �� b �Ķ��x����
�Y(ji��)�������Ă�(g��)���E�����Ը���(j��)�ױP�\(y��n)��(d��ng)��B(t��i)������Ă�(g��)݆�ӵ��D(zhu��n)�٣�
���Ϸ��̽M����O-�L(zh��ng)������݆�ױP�����\(y��n)��(d��ng)�W(xu��)ģ�ͣ������\(y��n)��(d��ng)�W(xu��)ģ�Ϳ���ֱ�Ӹ���(j��)���\(y��n)��(d��ng)�W(xu��)ģ���е�����(g��)���̽����(l��i)����̎����٘����
��һ�NӋ(j��)�㷽ʽ
��?j��ng)��y(t��ng)�����ƌ�(d��o)�^(gu��)���mȻ��(y��n)֔(j��n)����߀�DZ��^�����ġ��@���Bһ�N��(ji��n)�ε����\(y��n)��(d��ng)�W(xu��)Ӌ(j��)�㷽ʽ��
�҂�֪����ȫ���Ƅ�(d��ng)�ױP��һ��(g��)������ϵ�y(t��ng)�������w�\(y��n)��(d��ng)�ֿ��Ծ��Էֽ������(g��)��������ôֻ��ҪӋ(j��)�����݆�ױP�ڡ���X�Sƽ�ơ�������Y�Sƽ�ơ������@���� �����D(zhu��n)���r(sh��)���Ă�(g��)݆�ӵ��ٶȣ��Ϳ���ͨ�^(gu��)��(ji��n)�εļӷ���Ӌ(j��)����@���N��(ji��n)���\(y��n)��(d��ng)���ϳɵġ�ƽ��(d��ng)+���D(zhu��n)���\(y��n)��(d��ng)�r(sh��)����Ҫ���Ă�(g��)݆�ӵ��D(zhu��n)�١����@���N��(ji��n)���\(y��n)��(d��ng)�r(sh��)���� ��(g��)݆�ӵ��ٶȿ���ͨ�^(gu��)��(ji��n)�εĜy(c��)ԇ�������Ƅ�(d��ng)�ױP�^��F(xi��n)��ó���
��(d��ng)?sh��)ױP���� X �Sƽ�ƕr(sh��)��
��(d��ng)?sh��)ױP���� Y �Sƽ�ƕr(sh��)��
��(d��ng)?sh��)ױP�@���������D(zhu��n)�r(sh��)��
����������(g��)���̽M��ӣ��õ���ǡ���Ǹ���(j��)��?j��ng)��y(t��ng)������Ӌ(j��)����ĽY(ji��)�����@�NӋ(j��)�㷽ʽ���H�m����O-�L(zh��ng)���ε���݆�ױP��Ҳ�m�����κ�һ�Nȫ���Ƅ�(d��ng)�ęC(j��)���˵ױP��
Makeblock ��݆�ױP�ĽM�b
��Փ������ɣ������_(k��i)ʼ�Lԇ���丶�T��(sh��)�`�ˡ�
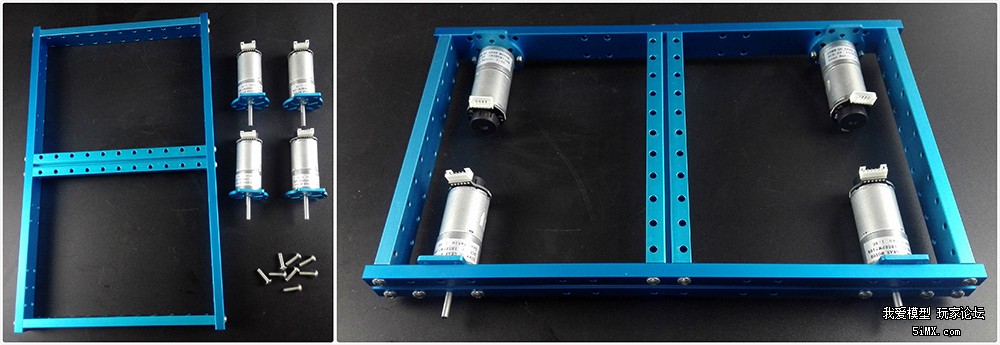
��һ�����M�b���ο�ܡ�
�ڶ������M�b늙C(j��)ģ�K��
������݆�ױP���Ă�(g��)݆���ٶ��мs���P(gu��n)ϵ����횾��_�ؿ���ÿ��(g��)݆�ӵ��ٶȣ���t����(hu��)��(d��o)��݁?zh��n)��c����l(f��)������(d��ng)Ħ�������H��(hu��)�ױP�\(y��n)��(d��ng)������߀��(hu��)��݆�ĉ����p�١����Ա��ʹ�þ��a늙C(j��)��
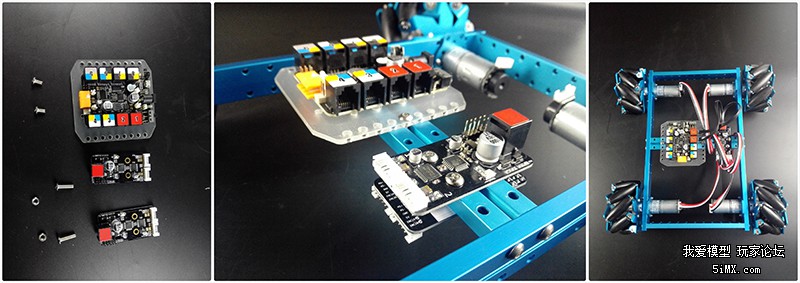
����������늙C(j��)ģ�K���b������ϡ�
���IJ�������݆���b������ϡ�
���岽�����b�·�岢�Ӿ���
���a늙C(j��)�����������(y��ng)���(q��)��(d��ng)����������������@��ʹ�õ� Makeblock ���a늙C(j��)�(q��)��(d��ng)�壬ÿһ�K������(q��)��(d��ng)�ɂ�(g��)늙C(j��)���Ӿ�����������Е�(hu��)�ἰ��Ҳ�����S����ϣ��ڴ��a�ж��x�Ì�(du��)��(y��ng)����ɡ�
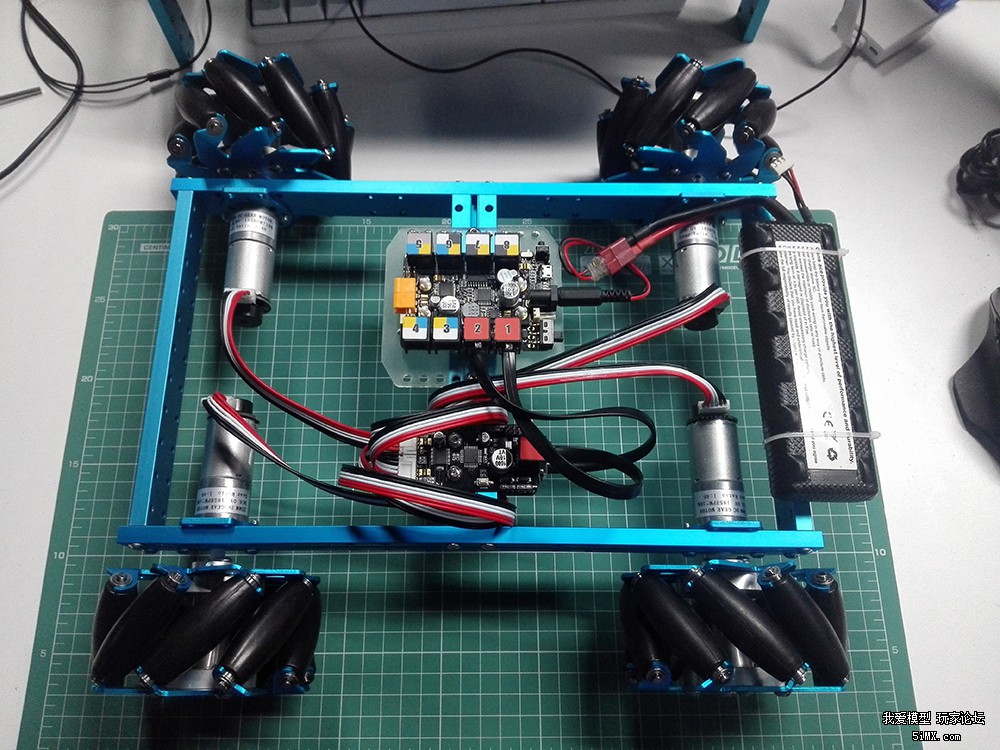
���������b��늳ء�
���ˣ�һ��(g��)�ܪ�(d��)���\(y��n)�е���݆�ױP������ˡ�
���Ƴ���
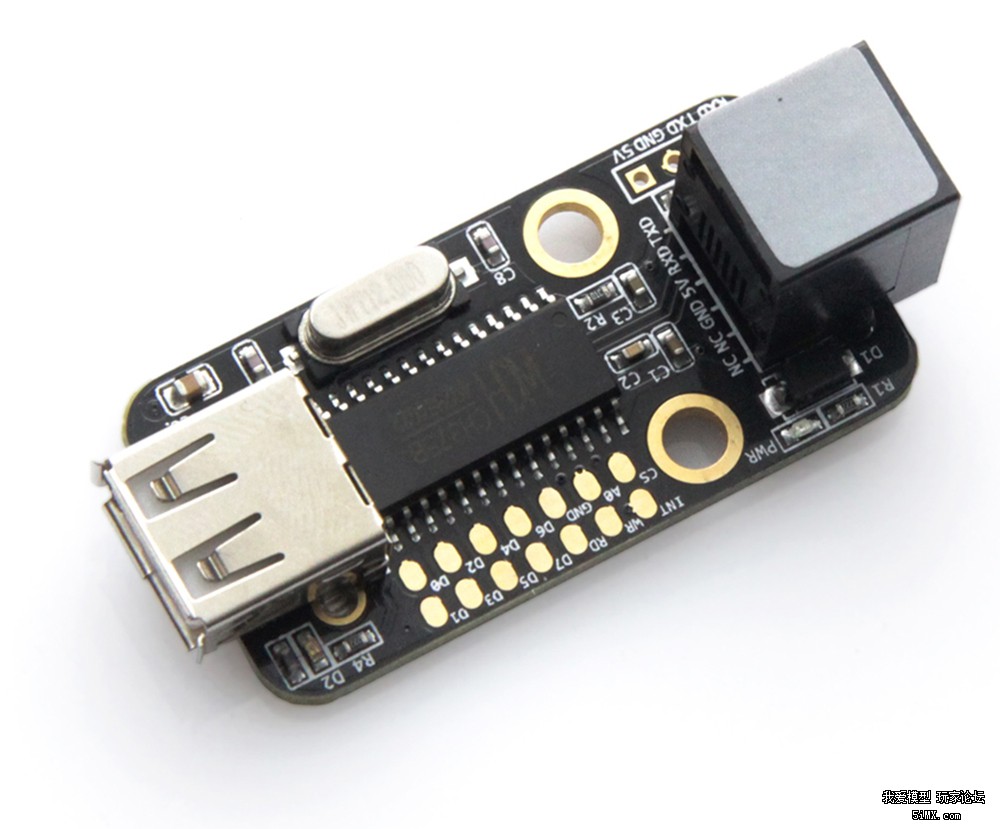
����(j��)��݆�ĵױP���\(y��n)��(d��ng)�W(xu��)ģ�ͣ�Ҫ��ȫ���������\(y��n)��(d��ng)����Ҫ������(g��)��������X�S�ٶȡ�Y�S�ٶȡ����D(zhu��n)���ٶȡ�Ҫ�a(ch��n)���@����(g��)���������кܶ�N���������Č�ʹ��һ��(g��) USB �Α��ֱ�����߅�ēu�U�a(ch��n)��ƽ���ٶȣ���߅�ēu�U�a(ch��n)�����ٶȡ�
���Ȍ�һ��(g��) USB Host ģ�K�B�ӵ� Orion ����� 3 �ڡ�
Ȼ�����һ��(g��)�o(w��)�� USB �Α��ֱ���
Ȼ��������������(x��)��(ji��)���ʹ������
���˼{ķ݆�����c(di��n)��ȱ�c(di��n)���Ƿdz����_�ģ��������˼{ķ݆ ��܇�Ӵ��Ƅ�(d��ng)�����`���(zh��n)�g(sh��)�C(j��)��(d��ng)���ܷdz��ã������@�N݆̥��ԽҰ���܅s�dz����Խ�ϵK����������������݆̥ͨ���e�Ǯ�(d��ng)�¶��^��ĕr(sh��)������߀��(hu��)�� �¡���������@�N܇̥���O(sh��)������һЩ��(ch��ng)�ظ�(j��ng)���C(j��)���˺��҃�(n��i)�}(c��ng)��(ch��)�C(j��)���˵ȣ���ǰ�����f(shu��)�����_(t��i)��܇Ҳֻ����·�r�^�õ���b·�����ܡ� | 




 ����TQQ:125739409;���g(sh��)����QQȺ281945664
����TQQ:125739409;���g(sh��)����QQȺ281945664

















 QQ���Ѻ�Ⱥ
QQ���Ѻ�Ⱥ QQ���g
QQ���g �vӍ��
�vӍ�� �vӍ����
�vӍ���� �ղ�
�ղ� ����
���� �
� ��
��