Ŀ �
1 �w Փ1
11 �����L(f��ng)�Ȱl(f��)չʷ1
12 �����L(f��ng)�ȵĹ���ԭ��2
13 �����O(sh��)Ӌ(j��)����Ҫ�΄�(w��)�̓�(n��i)��2
2 ����Փ�C3
21 ���ƺ��ĵ��x��3
22 �@ʾ�·���x��3
23 �{(di��o)�ٷ�ʽ���x��4
24 �ضȂ��������x��5
25 �����l(f��)�������x��5
3 ϵ�y(t��ng)��ҪӲ���·�O(sh��)Ӌ(j��)7
31 ϵ�y(t��ng)���w�O(sh��)Ӌ(j��)7
32 �Դ�·�O(sh��)Ӌ(j��)7
33 ��Ƭ�C(j��)��Сϵ�y(t��ng)�·�O(sh��)Ӌ(j��)8
331 AT89C51��Ƭ�C(j��)��(ji��n)��8
332 ��Ƭ�C(j��)��Сϵ�y(t��ng)�·10
34 �ضȲɼ��·�O(sh��)Ӌ(j��)11
341 DS18B20�ضȂ�������(ji��n)��11
342 �ضȲɼ��·13
35 �ض��@ʾ�·�O(sh��)Ӌ(j��)14
351 LED��(sh��)�a�ܺ�(ji��n)��14
352 �ض��@ʾ�·15
36 �(q��)���·�O(sh��)Ӌ(j��)15
361 TCT40-16T�����l(f��)������(ji��n)��15
362 �(q��)���·16
37 �(q��)��(d��ng)�c�{(di��o)���·�O(sh��)Ӌ(j��)17
371 �_(d��)���D������ULN2803��(ji��n)��17
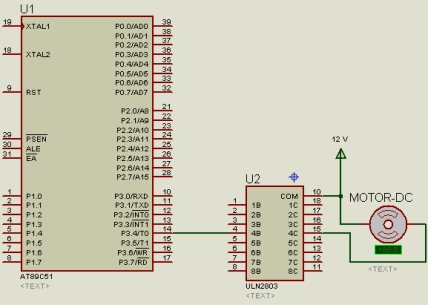
372 �(q��)��(d��ng)�c�{(di��o)���·18
38 ��(d��)�����I�·�O(sh��)Ӌ(j��)18
4 ܛ���O(sh��)Ӌ(j��)20
41 ϵ�y(t��ng)���wܛ���O(sh��)Ӌ(j��)���̈D20
42 ��Keil C51�M(j��n)���21
5 ϵ�y(t��ng)�{(di��o)ԇ�c����22
51 ϵ�y(t��ng)ܛ���{(di��o)ԇ22
52 �������d22
53 ϵ�y(t��ng)����22
6 �Y(ji��) Փ26
�� �x27
�����īI(xi��n)28
�� �29
1 �w Փ �ڬF(xi��n)��(sh��)�����У��҂�Ҫ��(j��ng)��ʹ��һЩ�����O(sh��)�䡣�mȻ�F(xi��n)�ڲ��ٳ��м�ͥ���ÿ��{(di��o)�O(sh��)�����齵�ع���,���ڴ��r(n��ng)���ͥ�L(f��ng)����Ȼ�������ļ����ص���Ҫ���ߡ����Ļ������サ�漾��(ji��)������ز���^����ضȺܸߣ��L(f��ng)�ȑ�(y��ng)ԓ�D(zhu��n)��(d��ng)�ı��^�죬�@�Ӳ��ܽo�ˎ���(l��i)��ˬ���������ϣ�����½��ĺܶ࣬��(d��ng)�˂�?n��i)�˯���L(f��ng)�ȵ��D(zhu��n)��(d��ng)�ٶȑ�(y��ng)�����p��(l��i)����ֹ��ð���mȻ�F(xi��n)�ڵ��L(f��ng)���в�ͬ�ęnλ�����{(di��o)��(ji��)����������˹���(l��i)?y��)Q������(d��ng)�˂���˯�r(sh��)�͟o(w��)�ܞ����ˡ��M�ܬF(xi��n)���ձ���ö��r(sh��)�ķ�ʽ��Q�@��(g��)��(w��n)�}�������r(sh��)�r(sh��)�g���ޣ�һ�����ֻ�Ѓɂ�(g��)С�r(sh��)�����@�ɂ�(g��)С�r(sh��)��(n��i)�ضȲ���һ���͕�(hu��)�½��ĺܶ࣬�L(f��ng)���P(gu��n)�]���˂����ܾ͕�(hu��)��?y��n)��ן��ٴ��с?l��i)�_����ȣ��@�ӕ�(hu��)ʹ�˵�˯���|(zh��)����͡������ϵķ�����֪����Ҫ�O(sh��)Ӌ(j��)��һ�N�����ܻ�����L(f��ng)�ȁ�(l��i)��Q�����O(sh��)Ӌ(j��)�Æ�Ƭ�C(j��)������ƺ��ģ��ÜضȂ������ɼ���(d��ng)ǰ�ضȣ�LED��(sh��)�a���@ʾ��(sh��)�r(sh��)�ضȣ�������(j��)��(d��ng)ǰ�z�y(c��)���Ĝضȣ�ݔ����ͬռ�ձȵ�PWM�}�_��̖(h��o)���Ķ��L(f��ng)�Ȍ�(sh��)�F(xi��n)�˲�ͬ���D(zhu��n)�١� 1.1 ��L(f��ng)�ȵİl(f��)չʷ ��L(f��ng)�Ⱥ�(ji��n)�Q��ȣ���۷Q���L(f��ng)�ȣ��ձ����n��(gu��)�Q�����L(f��ng)�C(j��)���İl(f��)�����F(xi��n)���ѽ�(j��ng)��(j��ng)�^(gu��)��һ�ٶ��꣬���ן��ļ��Č����L(f��ng)����Դ��1830�꣬�ǽ�ղķ˹��һ��(g��)����(gu��)�˰l(f��)����һ�N�ðl(f��)�l��(l��i)�(q��)��(d��ng)�ģ����Թ̶����컨���ϵ���L(f��ng)�ȡ�1880�꣬һ��(g��)���昷(l��)������(gu��)�˵�һ�Ό��~Ƭֱ���b��늄�(d��ng)�C(j��)�ϣ��ٽ����Դ���~Ƭ��ܿ������D(zhu��n)����(l��i)��1882�꣬һ��(g��)������?˹����?�������ļ~�s������l(f��)������Ʒ������L(f��ng)�ȡ� �Ї�(gu��)���a(ch��n)�ĵ�һ�_(t��i)�L(f��ng)������1916�ֱ꣬��1925���A���������S����ʽ���a(ch��n)��L(f��ng)�ȣ����ܿ��A���Ј�(ch��ng)���u(p��ng)�� һ�_ʼ��L(f��ng)�Ȳ��ܺܺõĿ��ƕr(sh��)�g���^(gu��)��һ�Εr(sh��)�g������F(xi��n)��һ�N�����O(sh��)���L(f��ng)���D(zhu��n)��(d��ng)�r(sh��)�g�������Ը���(j��)�O(sh��)���ĕr(sh��)�g��(l��i)�_�������P(gu��n)�]����L(f��ng)�ȣ��@�N�L(f��ng)���ڮ�(d��ng)�r(sh��)�ஔ(d��ng)�ܺ��u(p��ng)��Ҳ�ܵ��V�������ϲ��(��i)����L(f��ng)�ȵIJ�����ʽ��һԭ�ȵ����o�������I���ٵ��F(xi��n)�ڵ��|��ʽ����[1]�� 1.2 ��L(f��ng)�ȵĹ���ԭ�� ��L(f��ng)�ȵ���Ҫ���������ǽ���늙C(j��)��ͨ늺�Ȧ�ڴň�(ch��ng)�����������D(zhu��n)��(d��ng)���������D(zhu��n)����ʽ���@�ӵģ������Ҫ���D(zhu��n)����C(j��)е�ܣ�ͬ�r(sh��)������膖(w��n)�}�����߀��һ�����D(zhu��n)���Ƀ�(n��i)�ܡ���L(f��ng)�ȹ����r(sh��)����?y��n)���������^(gu��)��L(f��ng)�ȵľ�Ȧ������Ȧ�������ģ����ԕ�(hu��)�a(ch��n)�����֟�������U(ku��)ɢ�������L(f��ng)�ȵĜضȕ�(hu��)���ߡ����˂�?y��u)�ʲô�?hu��)���X(ju��)��?j��ng)�ˬ�أ���(y��n)����w�ı����������д����ĺ�Һ����(d��ng)��L(f��ng)�ȹ������҃�(n��i)�Ŀ՚��(hu��)�S����L(f��ng)������(d��ng)�����Ծ��܉����l(f��)���w����ĺ�Һ��������W(xu��)ԭ�����l(f��)��Ҫ���ᣬ���˂���(hu��)���X(ju��)���dz���ˬ[2] �� 1.3 �����O(sh��)Ӌ(j��)����Ҫ�΄�(w��)�̓�(n��i)�� ���O(sh��)Ӌ(j��)����AT8951��Ƭ�C(j��)����Ҫ���ƺ��ģ�����51��Ƭ�C(j��)��(du��)�ضȂ������ɼ����Ĕ�(sh��)��(j��)�M(j��n)��̎��������ͨ�^(gu��)���N���Ԫ������(du��)��L(f��ng)�ȸ��N������B(t��i)�M(j��n)�Ќ�(sh��)�r(sh��)���ƣ��Ķ������_(d��)���Ñ���Ҫ�� �����O(sh��)Ӌ(j��)��Ҫ�������(n��i)�ݣ� (1) �܉�z�y(c��)��(d��ng)ǰ�ضȲ��@ʾ���ɸ���(j��)�A(y��)�O(sh��)�ض��Ԅ�(d��ng)�_���P(gu��n)�]����(d��ng)��(d��ng)ǰ�ضȴ����A(y��)�O(sh��)�ضȣ��Ԅ�(d��ng)�_����С���A(y��)�O(sh��)�ض��Ԅ�(d��ng)�P(gu��n)�]�� (2) �A(y��)�O(sh��)�ضȿ�ͨ�^(gu��)���I���ӻ�p�١� (3) ���S�����ضȵ������L(f��ng)�ȿ������{(di��o)�٣���Ҫ�֞��傀(g��)�nλ���ض�ÿ��������L(f��ng)���Ԅ�(d��ng)����һ�n�� (4) �����(q��)�ù��ܡ�
2 ����Փ�C
2.1 ���ƺ��ĵ��x�� ����һ�����Æ�Ƭ�C(j��)������Ҫ����оƬ���ڱ��O(sh��)Ӌ(j��)�в���AT89C51��Ƭ�C(j��)��ͨ�^(gu��)ܛ�����̵ķ�����(l��i)��(sh��)�F(xi��n)��(du��)�ضȵČ�(sh��)�r(sh��)�ɼ��Ϳ��ƣ�����I/O��ݔ������(y��ng)�Ŀ�����̖(h��o)����Ƭ�C(j��)AT89C51����늉�����(du��)���^�ͣ���Ƭ��(n��i)����4k�ֹ�(ji��)��ROM��256�ֹ�(ji��)��RAM�����҃r(ji��)��Ҳ����(du��)�^���ˡ� ������������늉����^�·������ƈ�(zh��)�в��������ɼ����Ĝض���̖(h��o)�D(zhu��n)�Q�����̖(h��o)����(j��ng)�Ŵ��·�Ŵ����\(y��n)��Ŵ����M�ɵı��^�·��(l��i)�Д��Q����L(f��ng)�ȵ��D(zhu��n)��(d��ng)�ٶȡ� ��(du��)�ڷ���һ���Æ�Ƭ�C(j��)�������������ͨ�^(gu��)��(ji��n)�εij������Ԍ��ضȂ�����DS18B20�z�y(c��)�Ĝض�ͨ�^(gu��)LED��(sh��)�a���@ʾ����(l��i)�����ҿ���ͨ�^(gu��)���I�������ͨ�^(gu��)��Ƭ�C(j��)���ⲿ���I��(du��)�A(y��)�O(sh��)�ij�ֵ�M(j��n)�����ӻ��ߜp�٣�ͬ�r(sh��)��(du��)���(q��)�ù��ܲ��Æ�Ƭ�C(j��)��ܛ�����̸���(sh��)�F(xi��n)���ɱ��ͣ����Ԇ�Ƭ�C(j��)AT89C51����ƺ��ģ��m�ϱ����O(sh��)Ӌ(j��)����(du��)��AT89C51�ľ��w����(sh��)��Ҋ���桰Ӳ���O(sh��)Ӌ(j��)���еĸ�������B�� ��(du��)�ڷ�����������늉����^�·������Ƶĺ��ģ��mȻ�·���^��(ji��n)�Ρ�����(sh��)�F(xi��n)�������܌�(du��)�A(y��)�O(sh��)�ضȵ�ֵ�M(j��n)�и��ģ��o(w��)���M�㲻ͬ�Ñ������ʱ����O(sh��)Ӌ(j��)�����á� 2.2 �@ʾ�·���x�� ����һ ������LCDҺ���@ʾ���@ʾ�� �����������Ô�(sh��)�a�����@ʾ��������ꎘO�ӷ�����(d��ng)�B(t��i)��ʽ�@ʾ[3]�� ��(du��)�ڷ���һ��Һ���@ʾ���@ʾ���ַ��dz���(y��u)�����@һ��(y��u)�c(di��n)LED��(sh��)�a���ǟo(w��)�������ģ�����Һ���@ʾ���r(ji��)��̫�^(gu��)���F���(q��)��(d��ng)��������(l��i)Ҳ���ஔ(d��ng)��(f��)�s�ģ������O(sh��)Ӌ(j��)�����á� ��(du��)�ڷ���������LED�@ʾ���ɱ��dz��ͣ��ض��@ʾ������Ҋ����ʹҹ�gҲ�ܿ�Ҋ���@ʾ����ľ���Ҳ���^���ף�����@�N�@ʾ��ʽ�õ��ˏV���đ�(y��ng)�á�����ĵط��Dz���ԓ�������ܕ�(hu��)�a(ch��n)���W�q�F(xi��n)����?y��n)��@�N��(d��ng)�B(t��i)���跽ʽ�傀(g��)LED��(sh��)�a��������(g��)�c(di��n)���ģ������������Ђ�(g��)ҕ�X(ju��)����Ч��(y��ng)����20MS���҂�ֻҪ�O(sh��)�����m�Ē������ھͿ��Ա����W�q�F(xi��n)���@һ�������С��P(gu��n)��LED��Ԕ��(x��)����(sh��)�������桰Ӳ���O(sh��)Ӌ(j��)���еĸ�������B�� 2.3 �{(di��o)�ٷ�ʽ���x�� ����һ������׃�����{(di��o)��(ji��)��ʽ���\(y��n)��׃����ԭ�팢���220V����늉�ͨ�^(gu��)��Ȧ��������ͬ��ֵ����L(f��ng)��늙C(j��)�ӵ���ͬ늉�ֵ�ľ�Ȧ�ϾͿ��ԁ�(l��i)����ֱ��늙C(j��)���D(zhu��n)�١� �����������Æ�Ƭ�C(j��)��PWMܛ�����̷�ʽ��PWM������˼���}�_�����{(di��o)�ƣ�Ӣ����˼��Pulse Width Modulation�ĺ�(ji��n)����ʽ������һ�N��ij�NҎ(gu��)��׃�����}�_��������PWM�(q��)��(d��ng)ֱ��늙C(j��)���{(di��o)��(ji��)����ϵ�y(t��ng)��(d��ng)�У���õ��Ǿ���PWM�}�_����̖(h��o)��Ҳ�Ǿ��������(ji��n)�εġ��ڌ�(du��)ֱ��늙C(j��)���D(zhu��n)���M(j��n)�п��ƕr(sh��)����Ҫ����(j��)��(d��ng)ǰ�ضȁ�(l��i)ݔ����ͬռ�ձȵ�PWM�}�_��PWM�}�_��ռ�ձ���ָ���ƽ�ĕr(sh��)�g��һ��(g��)���ڕr(sh��)�g��(n��i)�İٷֱȣ���ȫ����ƽ��ռ�ձȞ��㣬�L(f��ng)�Ȳ��D(zhu��n)����ȫ����ƽ��ռ�ձȞ�100%�r(sh��)���D(zhu��n)���_(d��)����� [4]���Æ�Ƭ�C(j��)ݔ��PWM�}�_��̖(h��o)�r(sh��)�������ɷN������ (1) ����ܛ���ӕr(sh��)���������Æ�Ƭ�C(j��)�Ԏ��Ķ��r(sh��)�����̌�(sh��)�F(xi��n)��ͬռ�ձȵ�PWM�}�_��ݔ���������Д����?q��)���Ƭ�C(j��)ݔ�����ƽ�M(j��n)�иߵ��D(zhu��n)�Q���Ķ���(sh��)�F(xi��n)�L(f��ng)�ȵ��{(di��o)�٣����O(sh��)Ӌ(j��)����ԓ�������O(sh��)Ӌ(j��)��ͬռ�ձȵ�PWM�}�_��˼·�ǣ����O(sh��)����1S�����ڷ�������50MS�����(zh��n)���t20��(g��)����(zh��n)�����һ��(g��)1S����ô��(d��ng)����4��(g��)�B�m(x��)��50MS�ĸ��ƽ�}�_��Ȼ��16�B�m(x��)��50MS���ƽ�}�_����õ���ռ�ձȞ�20%��PWM������̖(h��o)�� (2) ���Æ�Ƭ�C(j��)�Ԏ���PWM���ܡ��������O(sh��)Ӌ(j��)���õ�AT89C51��Ƭ�C(j��)�](m��i)���@�N���ܣ�ֻ��STCϵ�еIJ��У��ʲ����С� ��(du��)�ڷ���һ��ԓ�������Ԍ�(du��)ֱ���L(f��ng)���M(j��n)���{(di��o)�٣����{(di��o)��(ji��)���Ǻܷ��㣬���Ҳ���׃������(l��i)��׃늉��������m��(y��ng)���Ի�Ҫ�� ��(du��)�ڷ�����������PWM �}�_�{(di��o)�Ƶļ�ܛ���ķ�����(l��i)��(sh��)�F(xi��n)��(du��)ֱ��늙C(j��)�Č�(sh��)�r(sh��)�{(di��o)�٣����кܴ���`���ԣ����ҿ��Ը���ֵذl(f��)�]��Ƭ�C(j��)�Ĺ��ܣ��C�Ͽ��]�x�÷������� 2.4 �ضȂ��������x�� ����һ���ß��ż��(l��i)����z�y(c��)�ضȵ�Ԫ����������m��(d��ng)?sh��)�����·�����z�y(c��)���Ĝض���̖(h��o)�����Ƭ�C(j��)AT89C51̎���� ���������ß����������z�y(c��)�ضȵ�Ԫ��������(j��ng)�^(gu��)�\(y��n)��Ŵ����Ŵ����ڜض�׃����(hu��)��������������ֵ�l(f��)������(y��ng)��׃��������Եõ�ݔ��늉�׃������̖(h��o)�� ���������ø߾��ȼ��ɜضȂ�����DS18B20����z�y(c��)�ضȵ�Ԫ������ֱ��ݔ����(sh��)�֜ض���̖(h��o)�o��Ƭ�C(j��)̎��[5]�� ��(du��)�ڷ���һ�����ß��ż����z�y(c��)Ԫ��������z�y(c��)�Ĝضȷ����dz������əz�y(c��)-50�z�϶ȵ�1600�z�϶ȣ������·�O(sh��)Ӌ(j��)���^��(f��)�s���ʱ��O(sh��)Ӌ(j��)������ԓ������ ��(du��)�ڷ����������ß������r(ji��)������(du��)���ˡ�Ԫ����Ҳ�������I������������茦(du��)�ضȵ�׃�����Ǻ����У��ڙz�y(c��)�ض���̖(h��o)�ĕr(sh��)��߀�п��ܮa(ch��n)��ʧ����`��ʱ��O(sh��)Ӌ(j��)������ԓ������ ��(du��)�ڷ����������ڜضȂ�����DS18B20�ļ��ɶȺܸߣ����p��������·���Ķ��z�y(c��)�`��Ҳ��(hu��)׃С�ܶ࣬DS18B20�z�y(c��)�ضȵ�ԭ���cǰ��ɷN������ԭ�������ܴ�IJ�ͬ����z�y(c��)���Ĝض�ֵ����ֱ�������Ƭ�C(j��)̎�������þ���������D(zhu��n)�Q����(ji��n)���˳���ľ�������ֻ��һ��������c��Ƭ�C(j��)���B���ӿ��ஔ(d��ng)��(ji��n)�Σ������O(sh��)Ӌ(j��)����ԓ�������P(gu��n)��DS18B20��Ԕ��(x��)����(sh��)�������桰Ӳ���O(sh��)Ӌ(j��)���е�������B�� 2.5 �����l(f��)�������x�� ���O(sh��)Ӌ(j��)��ԭ���Ǹ���(j��)���ӵ��������ԁ�(l��i)�ģ���Ҫ�`�Ё�(l��i)Դ�ǬF(xi��n)�ڵ������֙C(j��)�ώ����(q��)�õ�ܛ����������ҧ�˵�һ�㶼�Ǵ��ã����Î��Dz�ҧ�˵ģ�����������ֶ��Ǒ��ѵ����ڑ������g�ֲ�ϲ�g�c���ýӽ�����ˮ�(d��ng)�������X(ju��)�����ðl(f��)���l����22KHZ�ij�����̖(h��o)�r(sh��)���͕�(hu��)�Ԅ�(d��ng)�x�_�����ֻ����Ƴ����l(f��)�����l(f��)���ģ�M���õij����Ϳ��_(d��)���(q��)�õ�Ŀ�ġ��a(ch��n)��ԓ�l�ʵij�����һ�ɷN������ ����һ������ͨ�^(gu��)ܛ�����������r(sh��)��T1�a(ch��n)���l����22KHZ�ķ�����̖(h��o)����ͨ�^(gu��)��(li��n)�ķ������Á�(l��i)�����(q��)��(d��ng)������Ȼ����볬���l(f��)������ʹ�����l(f��)�����l(f��)��ģ�M���õij������Ķ��(q��)����ã��M(j��n)�����Ա������ӵĶ�ҧ�� ����������NE555��(g��u)�ɶ��C��ʎ���a(ch��n)�����{(di��o)�l�ʵķ������Ķ��(q��)��(d��ng)�����l(f��)������ʹ��l(f��)���҂���Ҫ�ij�����̖(h��o)���_(d��)���(q��)��Ŀ��[6]�� ��(du��)�ڷ���һ��AT89C51��Ƭ�C(j��)���r(sh��)��T1�����ڷ�ʽ1����ͨ�^(gu��)��ֵ���O(sh��)�ã�ݔ��22KHz�ĕr(sh��)���̖(h��o)ݔ�������÷���(f��)�Д࣬�����ϵ�y(t��ng)�Ĉ�(zh��)��Ч�ʡ� �����l(f��)�����x�����TCT40-16T ,���������(q��)��(d��ng)��������Ƭ�C(j��)P3.5�ڮa(ch��n)���ķ�����̖(h��o)��(j��ng)�^(gu��)��(li��n)����������ڳ����l(f��)�����ăɶˣ��@�ӳ����l(f��)�����Ϳ��l(f��)��22KHz�ij��������O(sh��)Ӌ(j��)����ԓ�������P(gu��n)��TCT40-16T��Ԕ��(x��)����(sh��)�������桰Ӳ���O(sh��)Ӌ(j��)���е�������B�� ��(du��)�ڷ�����������NE555�a(ch��n)���ij����l���{(di��o)��(ji��)�������{(di��o)��(ji��)����(d��ng)׃������(sh��)�F(xi��n)�ģ����ÿ�ҕ�����{(di��o)��(ji��)�l�ʣ��������Ñ�ʹ�á�
3 ϵ�y(t��ng)��ҪӲ���·�O(sh��)Ӌ(j��)
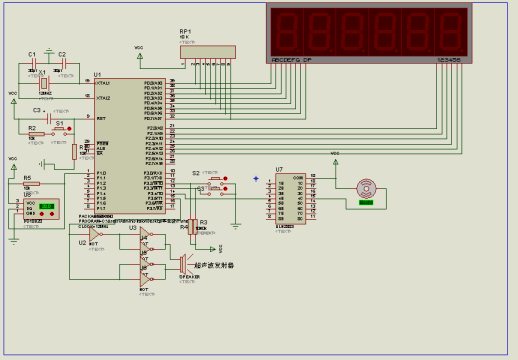
3.1 ϵ�y(t��ng)���w�O(sh��)Ӌ(j��) �����O(sh��)Ӌ(j��)��˼·�������O(sh��)Ӌ(j��)��Ҫ����AT89C51��Ƭ�C(j��)����ƺ��ģ����ÜضȂ�����DS18B20�ɼ���(d��ng)ǰ�ض������Ƭ�C(j��)̎������Ƭ�C(j��)����(j��)��(d��ng)ǰ�ض��c�A(y��)�O(sh��)�ضȵı��^�Q���Ƿ��_���L(f��ng)�ȣ���ͨ�^(gu��)���LED��(sh��)�a���@ʾ��(d��ng)ǰ�ضȺ��A(y��)�O(sh��)�ضȡ���(d��ng)��(d��ng)ǰ�ضȸ����A(y��)�O(sh��)�ضȣ��L(f��ng)���_�������A(y��)�O(sh��)�ضȕr(sh��)�L(f��ng)���P(gu��n)�]����Ƭ�C(j��)����(j��)��(d��ng)ǰ�Ĝض�ݔ������(y��ng)ռ�ձȵ�PWM�}�_����ͨ�^(gu��)ULN2803�����(q��)��(d��ng)������12V��ֱ��늙C(j��)���Ķ��a(ch��n)����ͬ�D(zhu��n)�١� �����O(sh��)Ӌ(j��)��ϵ�y(t��ng)����D��D3.1��ʾ:  �D3.1ϵ�y(t��ng)���w��D 3.2 �Դ�·�O(sh��)Ӌ(j��) ֱ����(w��n)���Դ����ֱ����Դ���ṩ�ߣ����·�����P(gu��n)�I�����ã���ˌ�(du��)�Դ��Ҫ����^�ߣ������nj�(du��)�Դ�y��ϵ��(sh��)��ݔ�����������Ҫ���ϣ�����Դ�](m��i)���_(d��)���O(sh��)Ӌ(j��)�����Դ��Ҫ��ֱ��Ӱ�ϵ�y(t��ng)������������ ���õ��D(zhu��n)5V�Դ�о����ͷ�(w��n)��оƬ���_�P(gu��n)�ͷ�(w��n)��оƬ�ɴ�������ͷ�(w��n)��оƬ���Զȸߣ��y��С������·��(ji��n)�Ρ��_�P(gu��n)�ͷ�(w��n)���·����С���D(zhu��n)�Q�ʸߣ����y�����ܼ���}�_�ɔ_��(y��n)�ء��C�Ͽ��]�x�þ��������˷�(w��n)��оƬLM7805�� �����O(sh��)Ӌ(j��)��Ҫ�ɂ�(g��)���Ȳ�ͬ��ֱ��늉�5V��12V������5V늉��Įa(ch��n)���nj����~220V����늽�(j��ng)�^(gu��)��������������ʽ�����V�������뷀(w��n)������LM7805��ݔ����늉�����߀���мy������ͨ�^(gu��)470uf���O�Ե���ݞV�����l��̖(h��o)��0.1uf�����O�Ե���ݞV�����l��̖(h��o)���M(j��n)�����Եõ���(w��n)����5V늉�[7]��12V늉�ֻ�茢5V늉���(j��ng)�^(gu��)�\(y��n)��Ŵ����Ŵɵõ���5V��12V늉��a(ch��n)���·��D3.2��a����3.2��b����ʾ�� 
�D3.2(a) 5V늉��a(ch��n)���·

�D3.2(b) 12V늉��a(ch��n)���· 3.3 ��Ƭ�C(j��)��Сϵ�y(t��ng)�·�O(sh��)Ӌ(j��) 3.3.1 AT89C51��(ji��n)�� AT89C51������(gu��)ATMEL��˾���a(ch��n)�ĵ�늉�?ji��n)�Ƭ�C(j��)���京��4K�ֹ�(ji��)��ROM��256�ֹ�(ji��)��RAM������MCS-51ָ�������̎������8λ�ģ��Һ���Flash�惦(ch��)��Ԫ�����ܷdz���(qi��ng)�� AT89C51��Ƭ�C(j��)��������(bi��o)��(zh��n)�Ĺ��ܣ�һ��(g��)8λCPU�l�ʷ���1.2-12MHZ��4K�ֹ�(ji��)Flash�W�棬256�ֹ�(ji��)��(n��i)����(sh��)��(j��)�惦(ch��)��RAM��4��(g��)8λ����I/O�ڣ�һ��(g��)ȫ�p�����пڣ�2��(g��)16λ���r(sh��)/Ӌ(j��)��(sh��)����5��(g��)�Д�Դ���Д����ϵ�y(t��ng)��Ƭ��(n��i)�Ԏ���ʎ���͕r(sh��)��·�� AT89C51��Ƭ�C(j��)���_�D��3.3��ʾ�� 
�D3.3AT89C51��Ƭ�C(j��)
�����_��������[8]: VCC��40���_��5V���늉��� GND��20���_�ӵء� XTAL1��19���_���Ƭ�C(j��)�ṩ�ⲿ�r(sh��)���̖(h��o)�����ʯӢ���w���{(di��o)��ݡ� XTAL2��18���_���Ƭ�C(j��)�ṩ�ⲿ�r(sh��)���̖(h��o)�����ʯӢ���w���{(di��o)��ݡ� P0�ڣ�P0.7~P0.0���@�M���_��8�l������P0.7�����λ��P0.0�����λ����©�O�_·��8λ��(zh��n)�p��I/O�ڣ��ЃɷN���ܡ���һ:��ͨ��I/O�ڣ��o(w��)Ƭ���(n��i)��r(sh��)��P0�ڿ���ͨ��I/O�ӿ�ʹ�á��ڶ�������ַ/��(sh��)��(j��)�ڣ����L��(w��n)�ⲿ?j��)?n��i)��r(sh��)��������ַ�����ĵ�8λ�͔�(sh��)��(j��)������ P1�ڣ�P1.7~P1.0,����P1.7�����λ��P1.0�����λ���H����I/O�ڡ� P2�ڣ�P2.7~P2.0������P2.7�����λ��P2.0�����λ��P2���ǎ���(n��i)����������8λ��(zh��n)�p��I/O�ӿڣ����ЃɷN���ܡ���һ����ͨ��I/O�ڣ��o(w��)Ƭ���(n��i)��r(sh��)��P2�ڿ�����ͨ��I/O�ڡ��ڶ�������ַ�ڣ����L��(w��n)�ⲿ?j��)?n��i)��r(sh��)��������ַ�����ĸ�8λ�� P3 �ڣ�P3.7~P3.0������P3.7�����λ��P3.0�����λ��P3�����p���ܿڡ����ЃɷN���ܡ���һ������ͨ��I/O�ڡ��ڶ����ܣ�P3.0RXD���п�ݔ�룻P3.1TXD���п�ݔ����P3.2INTO�ⲿ�Д�0ݔ�룻P3.3INT1�ⲿ�Д�1ݔ�룻P3.4T0���r(sh��)Ӌ(j��)��(sh��)�����}�_ݔ�룻P3.5T1���r(sh��)Ӌ(j��)��(sh��)�����}�_ݔ�룻P3.6WRƬ��RAM����̖(h��o)��P3.4RDƬ��RAM�x��̖(h��o)�� RST��9���_��(f��)λݔ�룬���ƽ��Ч��  ��29���_�ⲿ�����(n��i)���x��̖(h��o)����(d��ng)�L��(w��n)�ⲿ�����(n��i)��r(sh��)�����_���r(sh��)ݔ���}�_�����xƬ������(n��i)����xͨ��̖(h��o)��ͨ����EPROM��OE�ˡ�����ÿ��(g��)�C(j��)�������Ѓɴ���Ч������(d��ng)�L��(w��n)�ⲿRAM�r(sh��)���ɴ� ��29���_�ⲿ�����(n��i)���x��̖(h��o)����(d��ng)�L��(w��n)�ⲿ�����(n��i)��r(sh��)�����_���r(sh��)ݔ���}�_�����xƬ������(n��i)����xͨ��̖(h��o)��ͨ����EPROM��OE�ˡ�����ÿ��(g��)�C(j��)�������Ѓɴ���Ч������(d��ng)�L��(w��n)�ⲿRAM�r(sh��)���ɴ� ؓ(f��)�}�_�����F(xi��n)�����(q��)��(d��ng)8��(g��)LS��TTL�� ؓ(f��)�}�_�����F(xi��n)�����(q��)��(d��ng)8��(g��)LS��TTL�� ALE/ ��30���_��ַ�i�����S/���̾�����(d��ng)�L��(w��n)Ƭ��惦(ch��)���r(sh��)����P0.7~P0.0���_����ݔ��Ƭ��惦(ch��)����8λ��ַ��ͬ�r(sh��)߀��ALE/����ݔ��һ��(g��)���λ�}�_�����½������ڰ��@��(g��)Ƭ��惦(ch��)����8λ��ַ�i�浽�ⲿ���õ�ַ�i������ ��30���_��ַ�i�����S/���̾�����(d��ng)�L��(w��n)Ƭ��惦(ch��)���r(sh��)����P0.7~P0.0���_����ݔ��Ƭ��惦(ch��)����8λ��ַ��ͬ�r(sh��)߀��ALE/����ݔ��һ��(g��)���λ�}�_�����½������ڰ��@��(g��)Ƭ��惦(ch��)����8λ��ַ�i�浽�ⲿ���õ�ַ�i������  /VPP��31���_��(n��i)�ⲿ�����(n��i)���x��ݔ��ˡ�=1��CPU�L��(w��n)Ƭ��ROM������(zh��)����ָ���(d��ng)PC>0FFFH�r(sh��)���Ԅ�(d��ng)�D(zhu��n)��Ƭ��ROM��=0����ՓƬ��(n��i)�Ƿ��Ѓ�(n��i)�棬ֻ��(zh��)��Ƭ��ROM��ָ� /VPP��31���_��(n��i)�ⲿ�����(n��i)���x��ݔ��ˡ�=1��CPU�L��(w��n)Ƭ��ROM������(zh��)����ָ���(d��ng)PC>0FFFH�r(sh��)���Ԅ�(d��ng)�D(zhu��n)��Ƭ��ROM��=0����ՓƬ��(n��i)�Ƿ��Ѓ�(n��i)�棬ֻ��(zh��)��Ƭ��ROM��ָ�
3.3.2 ��Ƭ�C(j��)��Сϵ�y(t��ng)�· ��Ƭ�C(j��)�����r(sh��)��Ҫ�r(sh��)���̖(h��o)���r(sh��)���̖(h��o)ͨ�������ⲿ��ʽ���߆�Ƭ�C(j��)�ă�(n��i)����ʽ�ṩ�������O(sh��)Ӌ(j��)���Ã�(n��i)���r(sh��)犷�ʽ�����Æ�Ƭ�C(j��)��(n��i)���Ԏ��ķ���Ŵ�����XTAL2��Ŵ�����ݔ���ˣ�XTAL1��Ŵ�����ݔ��ˣ��@�ɂ�(g��)���_���ʯӢ���w��ʎ������ݣ���(g��u)�ɿ����Լ�����ʎ�������O(sh��)Ӌ(j��)��XTAL1��XTAL2�����һ��(g��)12MHZ�ľ���30pf�����[9]�� ��(f��)λ��ʹ��Ƭ�C(j��)�؏�(f��)����ʹ�Ġ�B(t��i)����Ӌ(j��)��C(j��)���؆���࣬���ij�ʼ��B(t��i)���¹�������Ƭ�C(j��)�Ǹ��ƽ��(f��)λ��һ���ЃɷN��ʽ�����I��(f��)λ����늏�(f��)λ���ɷN��(f��)λ��ʽ���ɡ������O(sh��)Ӌ(j��)���ð��I��(f��)λ����(d��ng)���°��I�_�P(gu��n)S1�r(sh��)��ϵ�y(t��ng)��(f��)λһ�Σ����R2��R3��10k����r(sh��)��·�c��(f��)λ�·��D3.4��ʾ��

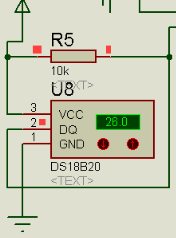
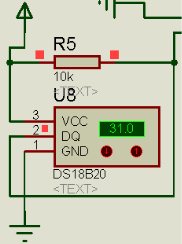
�D3.4��Сϵ�y(t��ng)�· 3.4 �ضȲɼ��·�O(sh��)Ӌ(j��) 3.4.1 DS18B20��(ji��n)�� DS18B20��(n��i)���Y(ji��)��(g��u)��Ҫ���Ă�(g��)���֣�64λ��ֻ�x����惦(ch��)��ROM���ضȂ��������Ǔ]�l(f��)�Ĉ�(b��o)���|�l(f��)��TH��TL�����üĴ���������������(g��)���_������DQ��GND��VDD������DQ�锵(sh��)����̖(h��o)�ˣ�GND���Դ�أ�VDD���Դݔ��ˡ� DS18B20����Ҫ�������c(di��n)���£� (1) �H����һ��(g��)�˿ڱ����ͨ�ţ� (2) �o(w��)��ⲿ������ (3) DS18B20֧�ֶ��c(di��n)�M�W(w��ng)���ܣ� (4) �m��(y��ng)늉������V��늉�������3.0~5.5V�� (5) ���C(j��)���Ğ��㣻 (6) �ض���9λ��12λ��(sh��)�֣� (7) ���Ј�(b��o)�������R(sh��)�e���ܣ� (8) ����ؓ(f��)늉����ԣ��Դ�ӷ��r(sh��)��оƬ����(hu��)���ģ� DS18B20�Ĺ��_�D�����֜ض�ֵ�cDS18B20ݔ���Ĕ�(sh��)������(du��)�ձ�Ҋ�D 3.5�ͱ�3-1��ʾ��

�D3.5 DS18B20�ضȂ�����
��3-1 ���֜ض�ֵ�cDS18B20ݔ���Ĕ�(sh��)������(du��)��
�ض�ֵ/�� ��(sh��)��ݔ�������M(j��n)�ƣ� ��(sh��)��ݔ����ʮ���M(j��n)�ƣ� | +125 0000 0111 1101 0000 07D0H +85 0000 0101 0101 0000 0550H +25.625 0000 0001 1001 0001 0191H +10.125 0000 0000 1010 0010 00A2H +0.5 0000 0000 0000 1000 0008H 0 0000 0000 0000 0000 0000H -0.5 1111 1111 1111 1000 FFF8H -10.125 1111 1111 0110 1110 FF5EH -25.625 1111 1111 0110 1111 FF6FH -55 1111 1100 1001 0000 FC90H |
3.4.3 �ضȲɼ��· DS18B20��(sh��)�֜ضȂ������z�y(c��)�F(xi��n)��(ch��ng)�ضȣ����z�y(c��)���Ĝض�ֵ����AT89C51��Ƭ�C(j��)��P1.0�ڣ���(j��ng)�^(gu��)��Ƭ�C(j��)̎�����@ʾ�˕r(sh��)�ض�ֵ�����c�O(sh��)���ض�ֵ�����^��ݔ������(y��ng)ռ�ձȵ�PWM�}�_��̖(h��o)���·��D3.6��ʾ�� 
�D3.6 �ضȲɼ��· 3.5 �ض��@ʾ�·�O(sh��)Ӌ(j��) 3.5.1 LED��(sh��)�a�ܺ�(ji��n)�� ���O(sh��)Ӌ(j��)�x���傀(g��)LED��(sh��)�a�܁�(l��i)�M(j��n)�Мض��@ʾ��LED�ַQ�锵(sh��)�a�ܣ���Ҫ����8��(g��)�l(f��)����O�ܘ�(g��u)�ġ�LED��(sh��)�a�ܰ��Y(ji��)��(g��u)���Է֞鹲ꎘO���(y��ng)�O�ɷN�Y(ji��)��(g��u)����D3.7��ʾ����ꎘO��8��(g��)�l(f��)����O��ꎘO�B����һ�𣬹��(y��ng)�O��8��(g��)�l(f��)����O���(y��ng)�O�B����һ��ͨ�^(gu��)���̵ķ�ʽʹ��Ƭ�C(j��)�����_ݔ����ͬ�ĸߵ��ƽ������Եõ�����(y��ng)�Ĕ�(sh��)�֣��@�N��(sh��)�a�ܵ��@ʾ��ʽ�ͱ��Q�����x�a[10]��
 
�D3.7 �߶�LED��(sh��)�a��
��3-2 �߶�LED��(sh��)�a�ܵĶ��x�a
����һ��(g��)��(sh��)�a�ܲ��ù�ꎘO�ӷ������Ƭ�C(j��)�У���Ҫ�@ʾ��(sh��)�֡�5���ʹa��c�pd�pf�pg�@5��(g��)���O��ͬ�r(sh��)�l(f��)�� �����@5��(g��)���O�ܽ�����ƽ�������������O�ܲ��l(f��)�⡣ֻҪP0��ݔ��01101101��6dH�����ɡ������c���x�a�Č�(du��)��Ҋ��3-2�� 3.5.2 �ض��@ʾ�· �����O(sh��)Ӌ(j��)��Ҫ�@ʾ��(d��ng)ǰ�ض�ֵ���A(y��)�O(sh��)�ض�ֵ������ǰ����(g��)LED��(sh��)�a���@ʾ��(d��ng)ǰ�ض�ֵ�����@ʾ0��99.9��ͬ�Ĝضȣ���ɂ�(g��)LED��(sh��)�a���@ʾ֮ǰ�A(y��)�O(sh��)���Ĝض�ֵ����(sh��)�a���@ʾ���ù�ꎘO�ӷ�������a,b,c,d,e,f,g,dp�քe�cP0.0��P0.7���B��������x��̖(h��o)������?y��n)�P0��ݔ�����ǵ��ƽ��������P0�ڽ���10K��������裬P2.0��P2.5�քe�ӵ�1,2,3,4��5,6���_����λ�x��̖(h��o)���@ʾ�·��D3.8��ʾ�� 
�D3.8 �ض��@ʾ�· 3.6 �(q��)���·�O(sh��)Ӌ(j��) 3.6.1 TCT40-16T�����l(f��)������(ji��n)�� TCT40-16T��һ�N�^С�ij����l(f��)���������ܰl(f��)�����ͬ�l�ʵij������m���ڼ����������������O(sh��)��ij����b���b�á����������^��D3.9��ʾ��
�D3.9 �����l(f��)����TCT40-16T 3.6.2 �(q��)���· P3.5�dž�Ƭ�C(j��)���r(sh��)��T1�ĕr(sh��)�ݔ���˿ڣ��҂��������ö��r(sh��)��T1ݔ���l�ʞ�22KHZ�ķ�����̖(h��o)����ͨ�^(gu��)��(li��n)�����������(q��)��(d��ng)�����볬���l(f��)����TCT40-16T��(l��i)ģ�M���ðl(f��)���ij������M(j��n)���_(d��)���(q��)��Ŀ��[11]���(q��)���·��D3.10��ʾ��

�D3.10 �(q��)���·
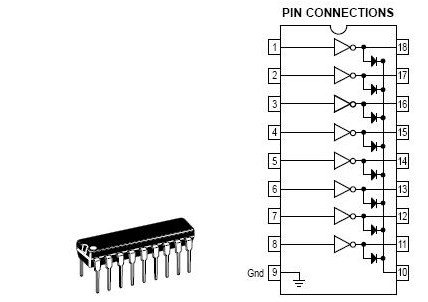
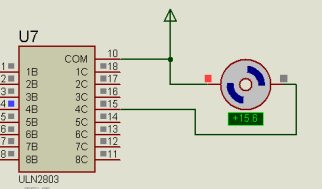
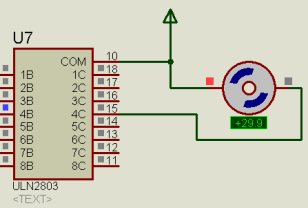
3.7 �(q��)��(d��ng)�c�{(di��o)���·�O(sh��)Ӌ(j��) 3.7.1 �_(d��)���D������ULN2803��(ji��n)�� ��?y��n)�ֱ��늙C(j��)�����r(sh��)��Ҫ�^������������Ƭ�C(j��)I/O��ݔ����������ڎ�ʮ������(j��)�e���o(w��)���M��ֱ��늙C(j��)�Ĺ�����������Ա��Ҫ����(q��)��(d��ng)�·���ڱ��O(sh��)Ӌ(j��)�(q��)��(d��ng)�·�У��x���_(d��)���D�����(q��)��(d��ng)��ULN2803��(l��i)�(q��)��(d��ng)ֱ���L(f��ng)��늙C(j��)��ULN2803��ʹ�Õr(sh��)�ӿڷdz���(ji��n)�Σ����Ҳ��������ף��ɞ�늙C(j��)�ṩ�װٺ������(q��)��(d��ng)���������(sh��)�H����һ��(g��)����оƬ���ΉKоƬ��ͬ�r(sh��)�(q��)��(d��ng)8��(g��)ֱ��늙C(j��)�� ULN2803��(sh��)�H����16��(g��)NPN���w�ܽM�ɣ���������18��(g��)���_�� ULN2803�Ĺ��_�D���D3.11��ʾ��
�D3.11 ULN2803���_�D
�����_��(ji��n)�����£� 1-8���_��8��(g��)ݔ��˿ڣ� 9���_���ӵضˣ� 10���_����COM�ˣ�һ��ҿջ���Դ�����cؓ(f��)�d���Դ��ͬ����һ���(q��)��(d��ng)Ч�����ã������O(sh��)Ӌ(j��)��12�Դ��ULN2803����ݔ�����������_(d��)500���������늉����_(d��)50V����ϵ�y(t��ng)�x�õ�늙C(j��)��12Vֱ���o(w��)ˢ늙C(j��)�����������300�������ң���˿���ULN2803��(l��i)�(q��)��(d��ng)�� 11-18���_��8��(g��)ݔ���˿ڣ� 3.7.2 �(q��)��(d��ng)�c�{(di��o)���· �����O(sh��)Ӌ(j��)����PWM�}�_�����{(di��o)�Ƽ��g(sh��)��(du��)ֱ��늙C(j��)�M(j��n)�Ќ�(sh��)�r(sh��)�{(di��o)�٣��L(f��ng)�ȷ֞���n���A(y��)�O(sh��)�ض�t0��25�ȣ��ض�ÿ����5�ȣ��L(f��ng)������һ�n����(d��ng)��(d��ng)ǰ�ضȵ����A(y��)�O(sh��)�ضȕr(sh��)��ݔ��ռ�ձȞ�0��PWM�}�_���L(f��ng)�Ȳ��D(zhu��n)����(d��ng)��(d��ng)ǰ�ضȴ����A(y��)�O(sh��)�ضȕr(sh��)���L(f��ng)���D(zhu��n)��(d��ng)�����ҿ��Ը���(j��)��(d��ng)ǰ�ض�ݔ������(y��ng)ռ�ձȵ�PWM�}�_���M(j��n)����(sh��)�F(xi��n)�ˌ�(du��)�L(f��ng)�ȵ��Ԅ�(d��ng)�{(di��o)�١� �(q��)��(d��ng)�c�{(di��o)���·���D3.12��ʾ��ֱ���L(f��ng)��늙C(j��)�cULN2803��COM�˹���12V�Դ��ֱ��늙C(j��)��һ�˽�ULN2803��4C����Ƭ�C(j��)��P3.4�ڽ�4B��ͨ�^(gu��)��Ƭ�C(j��)��P3.4��ݔ����ͬռ�ձȵ�PWM�}�_��̖(h��o)������Ԍ�(du��)ֱ��늙C(j��)�M(j��n)���{(di��o)�٣�ϵ�y(t��ng)�x�õ�늙C(j��)��12Vֱ���o(w��)ˢ늙C(j��)�� �D3.12�(q��)��(d��ng)�c�{(di��o)���· 3.8 ��(d��)�����I�·�O(sh��)Ӌ(j��) �����O(sh��)Ӌ(j��)��Ҫ�ɂ�(g��)��(d��)�����IS2��S3����Ҫ���Á�(l��i)��(du��)�A(y��)�O(sh��)�ضȳ�ֵ�M(j��n)���{(di��o)������(d��ng)S2ÿ����һ�Σ��A(y��)�O(sh��)��ֵ�Ԅ�(d��ng)��һ��S3ÿ����һ���A(y��)�O(sh��)�ضȳ�ֵ�Ԅ�(d��ng)�pһ���Ӝp�����Дʽ��(sh��)�F(xi��n)����S2�cP3.2���B��S3�cP3.3���B����(d��ng)���I�������̈�(zh��)���Д�����ƽ��Ч����(d��)�����I�·���D3.13��ʾ��
�D3.13 ��(d��)�����I�·
4 ܛ���O(sh��)Ӌ(j��)
4.1 ϵ�y(t��ng)���wܛ���O(sh��)Ӌ(j��)���̈D ��ʼ������������ɼ��ض������Ƭ�C(j��)��ͨ�^(gu��)LED�@ʾ����(d��ng)���I���r(sh��)̎�����I���o(w��)�I���£�����(j��)�ضȵõ���ͬ���D(zhu��n)�٣���D4.1��ʾ�� 
�D4.1 ܛ�����w�O(sh��)Ӌ(j��)���̈D 4.2 ��Keil C51�M(j��n)�г��� Keil C51 ܛ��Ŀ����Ҫ���ڽ�QǶ��ʽܛ���_�l(f��)�����R�Ć�(w��n)�}����(d��ng)�����(xi��ng)Ŀ�ĕr(sh��)��ֻ��Ҫ���O(sh��)�䔵(sh��)��(j��)��(k��)�x��ʹ�õ��O(sh��)�䣬uVision IDE ���O(sh��)�ú����еľ��g����朽����ʹ惦(ch��)���x�(xi��ng)[12]��Keil C51������(gu��)Keil Software��˾�_�l(f��)��51ϵ�в��Ҽ��݆�Ƭ�C(j��)C�Z(y��)�Ե�Ƕ��ʽ�_�l(f��)ܛ�����c��Ƭ�C(j��)�R���Z(y��)����ȣ�C�Z(y��)�Ե��`���Ը���(qi��ng)һ�c(di��n)����������څR��Ҳ����(ji��n)�Σ������W(xu��)��(x��)��ʹ�ã��Ҿ����ĺ���(sh��)ģ�K����ֲ�ԏ�(qi��ng)[13]��һ�ㄓ(chu��ng)��һ��(g��)Keil C51��(y��ng)�ó�����Ҫ��������IJ��E�� (1) ��(chu��ng)��һ��(g��)�����(xi��ng)Ŀ�ļ��� (2) �鹤���(xi��ng)Ŀ�x��Ŀ��(bi��o)������ (3) �鹤���(xi��ng)Ŀ�O(sh��)��ܛӲ���{(di��o)ԇ�h(hu��n)���� (4) ��(chu��ng)��Դ�����(xi��ng)Ŀ�ļ��� (5) ���愓(chu��ng)����Դ�����(xi��ng)Ŀ�ļ��� (6) ��Դ�����ļ����ӵ��(xi��ng)Ŀ�У� Keil C51ʹ�ý�����D4.2��

�D4.2Keil C51ʹ�ý���
5 ϵ�y(t��ng)�{(di��o)ԇ�c����
5.1 ϵ�y(t��ng)ܛ���{(di��o)ԇ Դ����ͨ�^(gu��)���g��ֻ���f(shu��)��Դ������Z(y��)���](m��i)�І�(w��n)�}�������ܱ��C�����߉���ܺ���Ҫ��߉����һ�£�����߀��회�(du��)�����M(j��n)���{(di��o)ԇ�������{(di��o)ԇ�r(sh��)���Բ��Æβ���(zh��)�л����B�m(x��)��(zh��)�У��B�m(x��)��(zh��)���ٶȿ죬����(d��ng)���e(cu��)�r(sh��)���ײ���e(cu��)�`�ĵط����β���(zh��)�к�(ji��n)�η��㣬���ԙz��ÿ�lָ������_�ԣ������^���������Ĵ����r(sh��)�g����˿����B�m(x��)�{(di��o)ԇ����(du��)�І�(w��n)�}�ĵط��چβ��{(di��o)ԇ[14]�� 5.2 �������d �����{(di��o)ԇ���ԺͿ������d�ˣ�����(j��ng)�^(gu��)���g�����ɵ�.HEX�ļ����d����Ƭ�C(j��)�ϣ����d�چ�Ƭ�C(j��)�ϵij���?q��)��ڳ����?ch��)����(ch��)������(l��i)����ʹ��늺���Ȼ���棬����(hu��)��˶��Gʧ�������O(sh��)Ӌ(j��)�Ŀ��������Ҋ���2�� 5.3 ϵ�y(t��ng)���� �����O(sh��)Ӌ(j��)����protuesܛ���M(j��n)�з��棬Proteusܛ����Ӣ��(gu��)Labcenter electronics ��˾�����EDA����ܛ���������H��������EDA����ܛ�����湦�ܣ�߀�ܷ����Ƭ�C(j��)���������������Ŀǰ��õķ����Ƭ�C(j��)����������Ĺ��ߡ�Proteus��������������EDA���ߣ���ԭ��D���D�����a�{(di��o)ԇ����Ƭ�C(j��)�c����·�f(xi��)ͬ���棬һ�I�ГQ��PCB�O(sh��)Ӌ(j��)��������(sh��)�F(xi��n)�ˏĸ���a(ch��n)Ʒ�������O(sh��)Ӌ(j��)[15]��Proteus ISIS�Ĺ���������һ�N��(bi��o)��(zh��n)��Windows���棬���а�����(bi��o)�}�ڡ����ˆΡ���(bi��o)��(zh��n)���ߙڡ��L�D���ߙڡ���B(t��i)�ڡ���(du��)���x���o���A(y��)�[��(du��)��λ���ư��o�������M(j��n)�̿��ư��o���A(y��)�[���ڡ���(du��)���x�ڡ��D�ξ����ڡ�
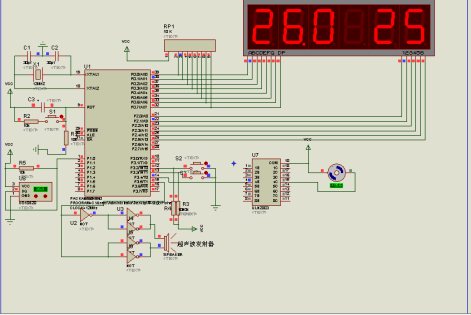
(1) �����O(sh��)Ӌ(j��)���A(y��)�O(sh��)�ض�ֵ��25�ȣ���(d��ng)��(d��ng)ǰ�ضȴ����O(sh��)���ضȕr(sh��)ֱ��늙C(j��)�_ʼ�D(zhu��n)��(d��ng)����(d��ng)��(d��ng)ǰ�ضȞ�26�ȕr(sh��)ֱ��늙C(j��)�D(zhu��n)��(d��ng)��r��D5.1��ʾ��
�D5.1 ��(d��ng)ǰ�ضȞ�26�ȵ��D(zhu��n)����r
(2) ��(d��ng)��(d��ng)ǰ�ض�ֵ������31�ȕr(sh��)����늙C(j��)�D(zhu��n)����D5.2��ʾ���@Ȼ�D(zhu��n)���^�ضȞ�26�ĕr(sh��)���������@�����ӣ�������Ƭ�C(j��)��(du��)늙C(j��)���D(zhu��n)�ٿ��ƹ����܉�������(sh��)�F(xi��n)��    �D5.2 ��(d��ng)ǰ�ضȞ�31�ȵ��D(zhu��n)����r
(3) ��(d��ng)�҂�ͨ�^(gu��)��(d��)�����IS2���A(y��)�O(sh��)�ض����ӵ�29���ڮ�(d��ng)ǰ�ض�26�r(sh��)��ݔ��ռ�ձȞ�����}�_��ֱ��늙C(j��)��ֹͣ�D(zhu��n)��(d��ng)����D5.3��ʾ��   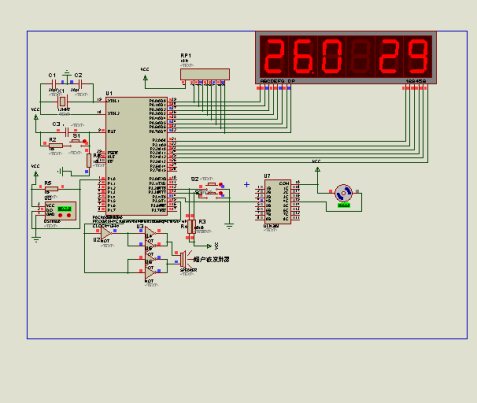  
�D5.3 ��(d��ng)ǰ�ض�С���O(sh��)���ضȵ��D(zhu��n)�����r
6 �Y(ji��) Փ
�����O(sh��)Ӌ(j��)�Ԇ�Ƭ�C(j��)AT89C51������оƬ��Ӳ����Ҫ�����Դ�·����Ƭ�C(j��)��Сϵ�y(t��ng)�·���ضȲɼ��·���ض��@ʾ�·����(d��)�����I�·���(q��)���·���(q��)��(d��ng)�c�{(di��o)���·����DS18B20�ضȂ������ɼ���(d��ng)ǰ�ض������Ƭ�C(j��)̎����LED��(sh��)�a���������@ʾ��(d��ng)ǰ�ضȺ��O(sh��)���ضȣ����ܸ���(j��)��(d��ng)ǰ�ضȺ��O(sh��)���ضȵIJ�ֵ�{(di��o)��(ji��)�L(f��ng)���D(zhu��n)�٣���һ��������(n��i)��(sh��)�F(xi��n)�ˌ�(du��)�L(f��ng)�ȵČ�(sh��)�r(sh��)�{(di��o)�١���(d��)�����I����Ҳ������ʹ�ã������{(di��o)��(ji��)�A(y��)�O(sh��)�ض�t0��ֵ��ͬ�r(sh��)�����l(f��)����Ҳ�������������_(d��)�����(q��)��Ŀ�ġ� �����O(sh��)Ӌ(j��)��(du��)�ڬF(xi��n)��(sh��)������зe�O�����ã������Á�(l��i)���齵�ع��ߣ��h(hu��n)�������ܣ��܉�o�ˎ���(l��i)�ܶ�㣬ͬ�r(sh��)�(q��)�õĹ������ļ�߀�Ǻ��б�Ҫ��
���һ �·���D
��Ƭ�C(j��)Դ��������: - #include <reg51.h>
- #define uchar unsigned char
- #define uint unsigned int
- sbit DQ=P1^0;
- sbit key2=P3^2;
- sbit key3=P3^3;
- sbit P3_4=P3^4;
- sbitP3_5=P3^5;
- float ff;
- uint y3;
- uchar shi,ge,xiaoshu,yushe=25;
- uchar code dispcode[]={
- 0x3f,0x06,0x5b,0x4f,
- 0x66,0x6d,0x7d,0x07,
- 0x7f,0x6f,0x77,0x7c,
- 0x39,0x5e,0x79,0x71}; //�δa
- uchar code tablel[]={
- 0xbf,0x86,0xdb,0xcf,
- 0xe6,0xed,0xfd,
- 0x87,0xff,0xef}; //��С��(sh��)�c(di��n)�Ķδa
- uchar dispbitcode[]={ //λ�x
- 0xfe,0xfd,0xfb,0xf7,
- 0xef,0xdf,0xbf,0x7f};
- uchar dispbuf[8]={0,0,0,0,0,0,0,0};
- void Delay(uint num)// �ӕr(sh��)����(sh��)
- {
- while( --num );
- }
- void digitalshow(uchar a4,uchar a3,uchar a2,uchar a1,uchar a0)
- {
- dispbuf[0]=a0;
- dispbuf[1]=a1;
- dispbuf[2]=a2;
- dispbuf[3]=a3;
- dispbuf[4]=a4;
-
- P2=0xff;
- P0=dispcode[dispbuf[0]];
- P2=dispbitcode[5];
- Delay(1);
-
- P2=0xff;
- P0=dispcode[dispbuf[1]];
- P2=dispbitcode[4];
- Delay(1);
-
- P2=0xff;
- P0=dispcode[dispbuf[2]];
- P2=dispbitcode[2];
- Delay(1);
-
- P2=0xff;
- P0=tablel[dispbuf[3]];
- P2=dispbitcode[1];
- Delay(1);
-
- P2=0xff;
- P0=dispcode[dispbuf[4]];
- P2=dispbitcode[0];
- Delay(1);
- }
- void dmsec(uint count)
- {
- uint i; // 1ms�ӕr(sh��)
- while(count--)
- {
- for(i=0;i<125;i++){}
- }
- }
-
- void tmreset(void)
- {
- DQ=0;
- Delay(90); // ���_�ӕr(sh��) ���� 480us
- DQ=1;
- Delay(4); // 90��4 ����С����׃��
- }
-
- void tmpre(void)
- {
- while(DQ);
- while(~DQ);
- Delay(4);
- }
-
- bit tmrbit(void)
- {
- uint i;
- bit dat;
- DQ=0;
- i++; // i++;���1us
- DQ=1;
- i++;
- i++;
- dat=DQ;
- Delay(8);
- return(dat);
- }
-
- uchar tmrbyte(void) //�xһ��(g��)����
- {
- uchar i,j,dat;
- dat=0;
- for(i=1;i<=8;i++)
- {
- j=tmrbit();
- dat=(j<<7)|(dat>>1);
- }
- return(dat);
- }
-
- void tmwbyte(uchar dat) //��һ��(g��)����
- {
- uint i;
- uchar j;
- bit testb;
- for(j=1;j<=8;j++)
- {
- testb=dat&0x01;
- dat=dat>>1; // �ĵ�λ�_ʼ
- if(testb) // Write 1
- {
- DQ=0; // ������
- i++;
- i++; // >1us
- DQ=1;
- Delay(4);
- }
- else // Write 0
- {
- DQ=0;
- Delay(4);
- DQ=1;
- i++;
- i++; // ������
- }
- }
- }
- void tmstart(void) //ds1820�_ʼ�D(zhu��n)�Q
- {
- dmsec(1);
- tmreset();
- tmpre();
- dmsec(1);
- tmwbyte(0xcc); // skip rom
- tmwbyte(0x44); // �D(zhu��n)�Q
- }
- uchar tmrtemp(void) //�xȡ�ض�
- {
- uchar a,b;
- tmreset();
- tmpre();
- dmsec(1);
- tmwbyte(0xcc); // skip rom
- tmwbyte(0xbe); // �D(zhu��n)�Q
- a=tmrbyte(); // LSB��8λ
- b=tmrbyte(); // MSB��8λ
- y3=b;
- y3<<=8;
- y3=y3|a;
- ff=y3*0.0625;
- y3=ff*10+0.5;
- return(y3);
- }
- void keyscan(void)
- {
- if(key2==0)
- {
- dmsec(5);
- if(key2==0)
- {
- yushe++;
- if(yushe==100)
- yushe=25;
- }
- while(!key2);
- }
- else if(key3==0)
- {
- dmsec(5);
- if(key3==0)
- {
- yushe--;
- if(yushe==0)
- yushe=25;
- }
- while(!key3);
- }
- }
- void time0_int(void) interrupt 1 //���r(sh��)��T0�a(ch��n)����ͬռ�ձȵ�PWM
- { uint tmp;
- static unsigned char j;
- TH0=(65536-50000)/256;
- TL0=(65536-50000)%256;
- j=j+1;
- if(tmp<=yushe)
- {
- P3_4=0;
- j=0; //ռ�ձ�00%
- }
- else if((tmp>yushe)&&(tmp<=��yushe+5������
- {
- if(j==4)
- P3_4=0;
- else if(j==20)
- P3_4=1;
- j=0;
- } //ռ�ձȞ�20%
- else if((tmp>(yushe+5))&&(tmp<=��yushe+10������
- {
- if(j==8)
- P3_4=0;
- else if(j==20)
- P3_4=1;
- j=0;
- } //ռ�ձȞ�40%
- else if((tmp>(yushe+10))&&(tmp<=��yushe+15������
- {
- if(j==12)
- P3_4=0;
- else if(j==20)
- P3_4=1;
- j=0;
- } //ռ�ձȞ�60%
- else if((tmp>(yushe+15))&&(tmp<=��yushe+20������
- {
- if(j==16)
- P3_4=0;
- else if(j==20)
- P3_4=1;
- j=0;
- } //ռ�ձȞ�80%
- else if(tmp>(yushe+20))
- P3_4=1;
- j=0; //ռ�ձ�100%
- }
- void time1_int(void) interrupt 1 //���r(sh��)��T1�a(ch��n)���l�ʞ�22KHz���(q��)�ó���
- {
- P_3.5=!P3_5;
- TH0=(65536-2500)/256;
- TL0=(65536-2500)%256;
- ����������������
- �����������ڱ���ƪ�� ���´��aՈ(q��ng)��51�����d������������
�����Y��51hei�ṩ���d: | 
 [��(f��)��朽�]
[��(f��)��朽�]

 ����TQQ:125739409;���g(sh��)����QQȺ281945664
����TQQ:125739409;���g(sh��)����QQȺ281945664