���������� ���� ԭ��D pcb ����D ���dȤ��С��� ���Կ���
���������Č���D���£�

0.png (447.79 KB, ���d��(sh��): 172)
���d����
2018-12-5 02:00 �ς�
�ڶ��� ��Ƭ�C���ƵĽ�ͨ�����OӋ����
��һ��(ji��) ϵ�y(t��ng)����ԭ���ͷ���
�ڶ���(ji��) ���n�}��Ҫ��(n��i)��
������ ��ͨ����Ӳ���OӋ
��һ��(ji��) �Դģ�K�OӋ
�ڶ���(ji��) ��Ƭ�C����ģ�K�OӋ
һ�������x��
�������
���������·
������(ji��) LED�@ʾģ�K
һ��LED��(sh��)�a�ܽ�B
����LED��(sh��)�a���@ʾԭ��
���Ĺ�(ji��) ���I�O��ģ�K
������ ��ͨ����ܛ���OӋ
��һ��(ji��) ������(sh��)����
�ڶ���(ji��) �Д����ģ�K
������(ji��) ��(sh��)�a���@ʾģ�K
���Ĺ�(ji��) ��ͨ���·
���幝(ji��) ��Ӌ�r�@ʾ���·
������(ji��) ��ͨ���OӋ���·�D
������ Proteus����
��һ��(ji��) Proteusܛ����B
�ڶ���(ji��) Proteus����DƬ
������ �{(di��o)ԇ�ĵ�
�Y(ji��) Փ
�� �x
�����īI
�� �
һ��Ӣ��ԭ��
The General Situation of AT89C51
����Ӣ�ķ��g
AT89C51����
����Դ����
�ڶ��� ��Ƭ�C���ƵĽ�ͨ�����OӋ����
��һ��(ji��) ϵ�y(t��ng)����ԭ���ͷ���
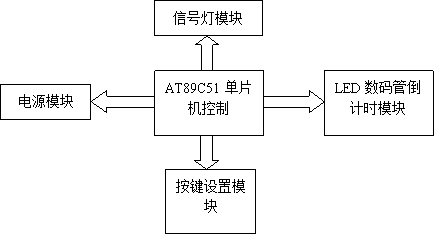
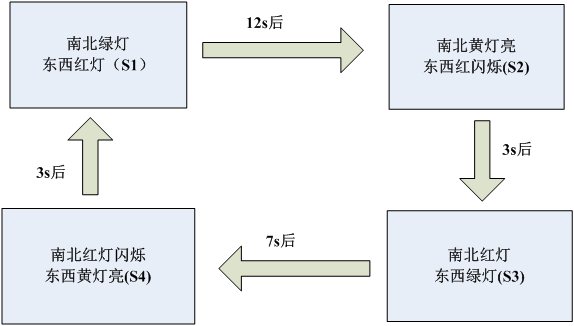
�OӋ��ϵ�y(t��ng)������һ��܇�������ʮ�ֽ���·�ڣ��v���ϱ������������ɵ����M��|�������֧�ɵ�������֧�ɵ�����ͨ�У��ɂ��ɵ��ϵĽ�ͨ��������ʽͬ�r�M�У����ɵ�ÿ�η���15�룬֧�ɵ�ÿ�η���10�룻ÿ�ξG��׃�t֮ǰ���S������3�룬�˕r��һ�ɵ��ϵļt�����W�q�� ���ɵ���֧�ɵ�����һ�M��ɫ��ͨ������ƣ��քe�����ɵ�����ļt���S���G�Լ�֧�ɵ�����ļt���S���G��߉������֪�������ɵ���G��ͨ�Еr��֧�ɵ���횞�t�����У��G���Y(ji��)�������ɵ��M���S���ȴ���B(t��i)��֧�ɵ��t���W�q���S���Y(ji��)�������ɵ�׃?y��u)�t�����У�֧�ɵ�׃?y��u)�G��ͨ�У�֧�ɵ��G���Y(ji��)����֧�ɵ��M���S���ȴ���B(t��i)�����ɵ��t���W�q�����ѭ�h(hu��n)�����@���^���п��Կ�������ͨ�����ƹ���4����B(t��i)���քe�飺S1��B(t��i)�����ɵ������G����֧�ɵ������t����S2��B(t��i)�����ɵ�������S����֧�ɵ��t���W�q��S3��B(t��i)�����ɵ������t����֧�ɵ������G����S4��B(t��i)��֧�ɵ�������S�������ɵ��t���W�q���@�Ă���B(t��i)����ѭ�h(hu��n)���ɴ��҂������г�4����B(t��i)���б�������4����B(t��i)�����̈D�� ��2.1 ��̖����B(t��i)��
�D2.1 ��ͨ�����̈D
ϵ�y(t��ng)�O����4�����I���քe��Enter�I��+�I��-�I��Shift�I��Enter�I�nj��O�õĴ_�J��+��-�nj��O�Å���(sh��)���{(di��o)����Shift�I�nj������\�кͅ���(sh��)�O�ÃɷN��B(t��i)���ГQ����ϵ�y(t��ng)��늻��քӏ�λ֮��Ĭ�Jģʽ�����Ք��ǰ������ӛ䛵ą���(sh��)�\�С����˕rShift�I���£��t�O�Þ酢��(sh��)�O�à�B(t��i)����(sh��)�a�����@ʾԭ��ӛ䛵ą���(sh��)���W�q����ͨ�^+��-�I������(sh��)�M���ģ������Enter�I���
���(sh��)���档
�D2.2 ϵ�y(t��ng)���w��܈D
Ȼ��ϵ�y(t��ng)���Ơ�B(t��i)����LED��(sh��)�a�ܵ��@ʾ������B(t��i)�aֵ�Լ��@ʾ�ĕr�gֵ�Ă�λ��ʮλ�͵�����IO�ڣ�ͨ�^���r���O��1s���r�������r�r�g�_���r�a(ch��n)�����r���Д࣬���Д��Ќ��r�g�pһ��Ȼ��ˢ��LED��(sh��)�a�ܵ��@ʾ��ֱ���r�gֵ���p��0���Д���һ��ָʾ����B(t��i)���b�댦���Ġ�B(t��i)���a�͕r�gֵ�Ġ�B(t��i)��
�D2.2��B(t��i)����LED�@ʾ�D
�ڶ���(ji��) ���n�}��Ҫ��(n��i)��
���n�}����Ҫ��(n��i)�����OӋ��һ�N����AT89C51��Ƭ�C�Ŀ��ƵĽ�ͨ���OӋ���@���OӋ�Ԇ�Ƭ�C����Ҫ�����������Է���Č��F(xi��n)ʮ��·�ڽ�ͨ���Ŀ��ƣ����F(xi��n)�����c܇���ķ�����ԓϵ�y(t��ng)�������g��·�D(zhu��n)�������M�С��M��Q����Ҫ���}�� ��ģ�M��ͨ��̖���Ľ���׃�Q�� ��ϵ�y(t��ng)Ӳ���OӋ�c���F(xi��n)�� ��ϵ�y(t��ng)ܛ���OӋ�� ��ϵ�y(t��ng)ܛӲ���C���{(di��o)ԇ�� �о���Ҫ������ ���OӋ����(j��)���H��ͨ���tģ�M�����Ľ�ͨ����ϵ�y(t��ng)���ütɫLED��ʾ���У��GɫLED��ʾͨ�У��SɫLED��ʾ�ȴ�����̖��ÿ��������һ�MLED��(sh��)�a�ܣ����Ե�Ӌ�r�@ʾ��������ߡ���(j��)�ˣ����OӋϵ�y(t��ng)�Ԇ�Ƭ�C����ƺ��ģ��B�ӳ���Сϵ�y(t��ng)���Ͱ��I�O��ģ�K�Ȯa(ch��n)��ݔ�룬��̖����B(t��i)ģ�K��LED��Ӌ�rģ�K�� �о�Ҫ�� �ن�Ƭ�C��̖��AT89C51 �ڿv������ɵ����M���֧�ɵ�������֧�ɵ�����ͨ�У��ɂ��ɵ��ϵĽ�ͨ��������ʽͬ�r�M�С� �����ɵ�ÿ�η���15�룬֧�ɵ�ÿ�η���10�롣 ��ÿ�ξG��׃�t֮ǰ���S������3�룬�˕r��һ�ɵ��ϵļt�����W�q�� �ݽo������ϵ�y(t��ng)�ĽY(ji��)��(g��u)�D��ܛӲ������
������ ��ͨ����Ӳ���OӋ
��һ��(ji��) �Դģ�K�OӋ
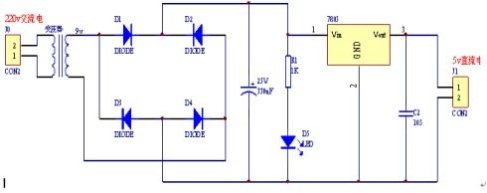
ϵ�y(t��ng)Ҫ����������(w��n)�����\�У����Ҫ��һ��(w��n)�����Դ�·�����˽o��Ƭ�C���NоƬ�ṩ����늉�����Ҫ������220V�D(zhu��n)�Q��ֱ��5V�� ����(j��)ģ�M�·�W����֪�R���D(zhu��n)�Q�^����D3.1��ʾ�� ׃������(j��ng)�^һ�����U�z�B���Դ,׃�����������·����l(f��)����·�����U�z�����������l(f��)�ĸߜ��ܻ������_���Ķ����C���m(x��)�·�����ܴ�����ēp�ġ� ׃����������һ����ʽ�����·����������õ�һ���y���ܴ��ֱ���Դ��߀��Ҫ��һ��1000uF/25V��늽���ݞV���y���� ׃����ݔ���˵�늉���(j��ng)�^��ʽ��������ݞV���������݃ɶ�ֱ�ӽ�ؓ�d����ؓ�d׃�������Դ늉����F(xi��n)���ӕr��늽����C1�ɶ˵�늉����l(f��)���^�����׃����Ҫ�õ�һ�����^��(w��n)����늉�����Ҫ���@���һ�����˷�(w��n)������ ��ؓ�d�����r��(w��n)������(n��i)������׃С����ؓ�d���׃С�r���˷�(w��n)������(n��i)������֕�׃��ʹ�ķ�(w��n)������ݔ��늉��������ֲ�׃�� ��Ƭ�C�ʹ����(sh��)����оƬ��ݔ��늉�����ֱ��5V���@���҂���Ҫ������220V��(j��ng)�^׃�����D(zhu��n)�Q��9V��늉���������(j��ng)7805��(w��n)����ֱ��5V��LM7805���ݔ�������1A����(n��i)��������ʽ��·���o���̕r�g��(n��i)ݔ���ˌ��أ�2�_����·��������7805�� ���˷�(w��n)���������һ��104�Ĵ�Ƭ��ݣ���V�����������á�
�D3.1 220V������(w��n)����5Vֱ��ԭ��
�ڶ���(ji��) ��Ƭ�C����ģ�K�OӋ
һ�������x������һ��AVR��Ƭ�C��AVR����һ�����ε����O���ܵįB�ӣ��������ģ���ԝM�㲻ͬ�OӋ�_�l(f��)�ߵČ��H��Ҫ��ͬ�r�����ṩһ���ͳɱ���OTPоƬ�����⣬PIC�ǵ��ĵ�˯�߹��ܡ����˯�ߡ���늡���늏�λ�·�����T���·������O�䣬ռ�ÿ��gС���ɱ��ͣ���ȫ���g(sh��)Ҳ�dz��ɿ����܉����̶ȵ؝M���_�l(f��)�ߵČ��HҪ����ˣ��ڹ��I(y��)���ƣ�PIC��Ƭ�C���V���đ��õ����и��I(y��)�Ŀ����У��䷀(w��n)���ԡ�ϵ�y(t��ng)���ĵȶ���V���_�l(f��)���J�ɡ��r�����ͬ���ܮa(ch��n)Ʒ��������ˮƽ�� ��������PIC24H64GP506��16λRISC�����̖̎�����������������c�� ����늉��ͣ������늉�1.8V������������ ����С�����\��ģʽ�£�ֻ��200mA�Ĺ�������������ߺʹ��Cģʽ��ֻ��3ma���������power off��B(t��i)��ֻ��Ҫ��0.1mA���\�Р�B(t��i)�а����ṩ6�N�\��ģʽ��3���r���̖������1�����l�ʵĕr犣�1�����l�r犺�1��DCO���`��ĕr��x��ʹϵ�y(t��ng)�܉���������ĕr犹����������ϵ�y(t��ng)���ģ�����ϵ�y(t��ng)���OӋ�� �S�������O�ӿڣ������˜ʵ�UART��SPI��I2C�ӿڣ����Ժ;�����ͬ�ӿڵ��O���B���M��ͨӍ�ɼ����P(gu��n)���O�Ĕ�(sh��)��(j��)��ԓMCU,����256λRAM��8 kbit Flash��(n��i)�����Д����ѹ��ܣ�����ͨ�^�Д�ʹ��Ƭ�C��˯��ģʽ������ģʽ�� ���������x��r�������51ϵ�І�Ƭ�C������51��(n��i)�˵ĵ��ġ������ܵ�8λ��Ƭ�C����(n��i)��4K�ֹ�(ji��)Flashֻ�x����惦��������MCS-51ָ���80C5l���_�Y(ji��)��(g��u)�����������Ӌ��C��AT89C51�鹤�I(y��)���Ƒ���ϵ�y(t��ng)�ṩ�ͳɱ����߿ɿ��ԵĽ�Q�������������������c��128�ֹ�(ji��)��(n��i)��RAM��32��I/O�ھ������T�����ɂ�16λ���r��Ӌ��(sh��)��Ԫ��һ��5�ɼ��Д�Y(ji��)��(g��u)��������һ��UARTͨ�ſڣ���(n��i)������͕r��·�� ����(j��)ϵ�y(t��ng)���H��Ҫ����K�x��ɱ����������ڲ�����51ϵ�І�Ƭ�C����̖��STC80C51����D3.2��ʾ��51ϵ�І�Ƭ�C��(n��i)��ʾ��D���D3.3��ʾ��AT80C51��Ƭ�C��Сϵ�y(t��ng)�·�D��
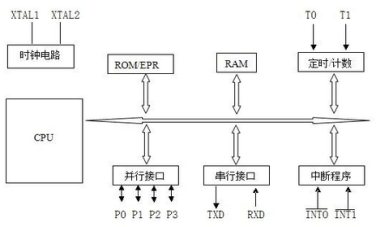
�D3.2 8051��Ƭ�C��(n��i)�˽Y(ji��)��(g��u)ʾ��D
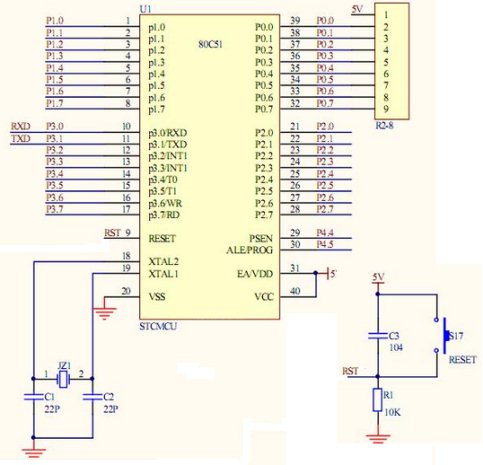
�D3.3 STC80C51��Ƭ�C��Сϵ�y(t��ng)�·�D
������λ�·��Ƭ�C��Сϵ�y(t��ng)��ָһ��������ϵ�y(t��ng)��������������Ҫ�߂�����ٵ�Ԫ����(g��u)�ɵ�ϵ�y(t��ng)��51ϵ�І�Ƭ�C����Сϵ�y(t��ng)һ�㑪��������Ƭ�C�������·����λ�·�� ��λ�·�������ݺ���贮(li��n)�M�ɣ�����(j��)���늉�����ͻȻ��׃�����|(zh��)����֪����һ��ϵ�y(t��ng)��늣�RST���_Ĭ�J����ƽ��RC�·��Q�����ƽ�ĕr�g��һ�����͵�51��Ƭ�C����RST���_����ƽ�ɂ��C���������ϵČ������ã�����RCֵҪ�x���m�������ܴ_���ɿ��ď�λ������(j��)t=R*C��tҪ���ڃɂ��C�����ڣ��x�������ֵ��10k�������ֵ��10uF����Ȼ߀�������ą���(sh��)�M�ϣ�ֻҪ�M��ԭ��ʹRC�M�Ͽ��Ԯa(ch��n)����RST���_�ø����كɂ��C�����ڡ�������ξ��w������Ӌ�㣬���ԅ����·�����ĕ����� ��Ƭ�C��λ�·������X���؆�������λ���o��(n��i)���ij���?q��)����^�_ʼ�\�С���Ƭ�Cϵ�y(t��ng)���\���У��������h(hu��n)���ɔ_�����،����\��ʧ�أ��Ϳ���ͨ�^��λ���I���F(xi��n)����Ƭ�Cϵ�y(t��ng)�������ӡ� ���·�D�У����������ֵ��10uF���������ֵ��10k�����Ը���(j��)��ʽ��������������0.7���Դ늉������O���Դ��5V����������늉����L��5*0.7=3.5V�@һ�^������Ҫ�ĕr�g��10K * 10UF = 0.1S�� Ҳ�����f����Ӌ��C����0.1S���^���У���݃ɶ˵�늉�����0����3.5V���@�Εr�g��(n��i)�����10K�ɶ˵�늉������͵�1.5V����(li��n)�܇��·�е�늉��Ϳ�늉�����������0.1S��RST���_늉���5V?1.5V������������֮��0.1S�����C�B�m(x��)��늵�5V���@��10K���ɶ˵�늉��ӽ�0V��RST�ڵ��ƽ����ʹϵ�y(t��ng)���������������°��o�r��ԓ�_�P(gu��n)����ͨ�r���@�r��������ɶ��γɭh(hu��n)·�����������·���������늡��S���r�g�����ƣ�������ɶ˵�늉�����5Vጷųɞ�1.5V����������С���@�r10K������ɶ˵�늉��_��3.5V�����������࣬����RST���_׃?y��u)���ƽ����Ƭ�Cϵ�y(t��ng)�Ԅӏ�λ�� ԭ�t����������λ�·RST���_���ճ��^2US�ĸ��ƽ��̖��ֻҪ�������늺ͷ�늕r�g����2US�����ɏ�λ��ԓ�·�����ֵ�����ֵ���Ը���(j��)���H�·���ġ�����λ�I��ʹ��ݶ�·��ጷ�֮ǰ�����������ʹ���ɶ�늉����ߣ��Ķ��oRST���_һ�����ƽ��
���������·�����·������ʎ���w�̓ɂ���ݽM�ɣ����Ƭ�C�ṩָ��r犡�����51ϵ�y(t��ng)���ⲿ����ͨ���x��11.0592MHz���@�ӿ��Ԯa(ch��n)�����ʵ��뼉�e�ęC���r�g���ʴ_�صõ�9600bps��19200bps�������д���ͨӍ�Ĉ��ϣ����㶨�r�����������·��PCB�����OӋ�rһ��Ҫ�M��������Ƭ�C�����҃ɂ����_����Ƭ�C���߾��M��һ���L�����ƫ��̫�������������������Ӌ�r���ʴ_�������·�ĵ�һ��Ҫ�͆�Ƭ�C�ĵع��أ�51��Ƭ�C��Сϵ�y(t��ng)������������������r�¿��Բ��ø����l�ʵľ���51��Ƭ�C��Сϵ�y(t��ng)�������ʎ�l��ֱ��Ӱ푆�Ƭ�C��̎���ٶȣ��l��Խ��̎���ٶ�Խ�졣�ھ����l�ʵ��x���ϣ����܉�M��ϵ�y(t��ng)��Ҫ��ǰ���±M���ܵ��x����l�ʵľ������l��Խ���书�ĵ�����Խ�ͣ����Բ����Ǿ����l��Խ��Խ�ã�Ҫ����(j��)���H��r���l�ʺ����M��ȡ�ᡣ ��Ƭ�C���ⲿ��������Ϊ�����Ƭ�C�B�ӣ���Փ��Ҳ�ǿ�������ʹ��Ƭ�C�����ģ�ֻ���@�ӵĽY(ji��)��(g��u)��ʹ�·�Юa(ch��n)���ܶ������l�ʵ��C�����C�������͕r���ʎ���ķ�(w��n)���ԡ���ˣ����ⲿ�������߅��ͨ�^��һ���������ȥ�^�V�C����������ݵ���ֵ�]���e�̶���ֵ������(j��)��ͬ�Ć�Ƭ�C���в�ͬ���x����51ϵ�І�Ƭ�C���������һ����15~30pF������PCB�����r��������x����Խ��Խ�ã��������x��Ƭ�CҲ��Խ��Խ��
������(ji��) LED�@ʾģ�K
һ��LED��(sh��)�a�ܽ�BLED��(sh��)�a�����ɶ����l(f��)����O�ܱ����b��һ�����γɡ�8�����ε��b�ã��������B���ڃ�(n��i)����ÿ�����O�����Լ���һ�����_��������ͬ����һ������늘O����(sh��)�a�������@ʾ7�κ�һ��С��(sh��)�c��8���l(f��)����O�ܣ��͕����������Ĕ�(sh��)�a�ܶα��c���� ��һ���ض��Ķε�LED��ʩ��늉��r���@Щ�ض��ĶΌ����c�������γ��҂��۾������ĈD��8��LED��(sh��)�a��ֻ���@ʾ���ε�0~9�İ�������(sh��)�ֺ�A~F��Ӣ����ĸ����һЩ�Δ�(sh��)���^���LED�����@ʾ����ă�(n��i)�ݣ���֮����(sh��)�a��߀�����@ʾ��(sh��)�ֺ���ĸ���������s���@ʾ��Ϣ߀����Ҫ���]ʹ��Һ��֮ĸ�����s�������������D3.4��ʾ��8��LED��(sh��)�a��ʾ��D��
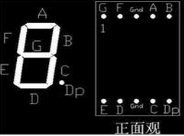
�D3.4 LED��(sh��)�a��ʾ��D
����LED��(sh��)�a���@ʾԭ��LED��(sh��)�a����Ҫ��ͨ�^�c�������εİl(f��)����O�ܣ���ҕ�X�Ͻo�˂��@ʾ��������(sh��)�ֺ���ĸ���Π�(q��)��LED��(sh��)�a�ܵķ�ʽ�ЃɷN��һ�N���o�B(t��i)�@ʾ�(q��)�ӣ���һ�N�DŽӑB(t��i)�@ʾ�(q��)�ӡ��o�B(t��i)�@ʾ�(q��)�ӣ�Ҳ���Q��ֱ���(q��)�ӡ��o�B(t��i)�(q��)�ӵ��b�ã�ÿ������Ҫ�Ɇ�Ƭ�C��һ��I / O�ځ��(q��)�ӣ���������BCD�a���á��o�B(t��i)�(q��)�ӵă�(y��u)�c�Ǿ��̺��Σ��@ʾ���ȸߣ�ȱ�c��ռ��I/ O�˿ڶ࣬������Ҫ�(q��)��4��8�εĔ�(sh��)�a�ܣ��t��Ҫ4*8=32��IO�ڣ���51��Ƭ�C���õ�I/O�˿�һ��ֻ��32���҂��ڌ��H�����б�����ӵľ���a�(q��)��������p��I/O�ڵ����M��ͬ�rҲ������Ӳ���·�ď��s�ԡ��ڶ��N�DŽӑB(t��i)�@ʾ�(q��)�ӣ���(sh��)�a�܄ӑB(t��i)�@ʾ��ʽ���������б��V��ʹ�á��ӑB(t��i)�@ʾ�����������۾���ҕ�Xͣ���F(xi��n)�������ڿ���ijһ������ں̵ܶĕr�g��(n��i)����ʹԓ������ʧ����������߀������ԓ������ӑB(t��i)�@ʾ���nj���(sh��)�ְ��Ղ�ʮ��ǧλ�ĸ�ʽ���_������(j��)����λ�Ĕ�(sh��)�ַքe�����c��������(sh��)�a�ܵİl(f��)����O�ܵĶΡ�ÿ��ֻ�c��һ��λ�����Ĕ�(sh��)�a�ܣ�����λ�Ĕ�(sh��)�a�ܱ�Ϩ�硣 ͨ�^���ο���ÿ��LED��(sh��)�a�ܵ�COM�ˣ���ʹÿһ�������Ĕ�(sh��)���@ʾ���@��һ���ӑB(t��i)���^�̡����^���@ʾ��ÿλ��(sh��)�a���c���r�g��1?2���룬�����˵�ҕ�X�Ͱl(f��)����O�ܵ����xЧ���ij��m(x��)�ԵĬF(xi��n)�M���㲻����ͬһ�r�g�c����(sh��)�a�ܣ�����ֻҪ�����ٶ����죬�o�˵�ӡ����һ�M��(w��n)�����@ʾ��(sh��)��(j��)���������W�q�У��ӑB(t��i)�@ʾ���o�B(t��i)�@ʾ��Ч����һ�ӵģ����ǿ��Թ�(ji��)ʡ������I / O�˿ڣ��Լ������ġ���˄ӑB(t��i)�@ʾ����V���ı����á� ���Ĺ�(ji��) ���I�O��ģ�K
�I�P����õĆ�Ƭ�Cϵ�y(t��ng)���˙C���棬����(j��)�M����ʽ�ɷ֞�ɷN������ʽ�����ʽ������ʽ�I�P����һ�����I��Ҫ����һ��IO�ڣ�����m�����ڰ��I��(sh��)���ٵĈ��ϣ����ʽ��ͨ�^�M��Ϳv��z�y�����Ԍ�IO�ڵ�ʹ�Ô�(sh��)����ָ��(sh��)�p�٣����������M��������v������Ԍ��F(xi��n)9���I�a�ķֱ棬���������ʽ�I�P�OӋ����Ҫ9��IO�ڣ������ʽ�I�Pֻ��Ҫ6��IO�ڣ����I��(sh��)��Խ�࣬���Թ�(ji��)ʡ��IO�ھ�Խ�࣬�������ʽ�dz��m������Ҫ���I�^�����r����ϵ�y(t��ng)��ҪС���o���ƣ���Ƭ�C��I / O�˿����ֱ��ʹ�ê���ʽ�OӋ�����I�·ԭ��D��D3.7��ʾ��
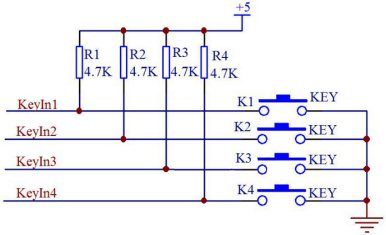
�D3.7 ����ʽ���I�· �I�P�_�P(gu��n)����ɶ������o�M�ɣ��dž�оƬϵ�y(t��ng)����õ�ݔ���b�ã����Ԍ������ַ�͔�(sh��)��(j��)ݔ��o��Ƭ�C��ͨ����Ƭ�Cϵ�y(t��ng)���÷Ǿ��a�I�P���Ǿ��a�I�P��ܛ���R�e���I�P�ϵİ��I�������нY(ji��)��(g��u)���Σ��`������c����˱��V��������̎����ϵ�y(t��ng)���I�P���o�֞���|ʽ�ͷǽ��|ʽ�ɷN�����������õİ��Iͨ����һ���Cе�I�P���|�M�ɡ� ���_�P(gu��n)K�]�б����r��KeyIn����ͨ�^4.7K����������c5V�Դ�B�ӣ����ݔ���ߣ���K�]�Ϻ�KeyIn�cGND�̽ӣ�ݔ�����ƽ��Ҳ�����f������z�y���I�Ƿ��µķ����Ǚz�y����IO�ɸ��ƽ׃�ɵ��ƽ���ͱ�ʾԓ���I�����¡� �������ڰ��I�Y(ji��)��(g��u)���õ��ǙCе�|�c���Cе�|��ڠ�B(t��i)׃����˲�g���a(ch��n)��늉��IJ��ӣ��@�N���ӌ����˵ĸ�֪���f�ǘO��ģ��������X������������̎���ٶ��_���뼉�����{�뼉�Ć�Ƭ�C���f���@����һ�κ��L�ĕr�g�ˣ����@�Εr�g����е�늉����Ӷ��ܱ���Ƭ�Cһһ�z�y�����μ���ֻ�Ǚz�yIO��߅��׃���͕��ڙCе�|�̎�ڲ���(w��n)����B(t��i)�r�`�J���ǰ��I�����£����ҕ����F(xi��n)��Ρ�����O�Þ��Д��ԃ����������l�����M���Дຯ��(sh��)�� ��Q�@�N���}�ķ���Ҳ�ܺ��Σ������҂�ͨ�����f��ȥ����ԭ�����DZ��_�Cе�|�c�����ϕ��a(ch��n)������(w��n)��늉��ĕr�g�Σ���ȥ�z�yIO�ڵ��ƽ��������ͨ�^݆ԃ�z�y߀���Д��z�y��һ���z�y�����IIO���ƽ��B(t��i)���Ĭ�J��B(t��i)�l(f��)����׃���t����һС���ӕr��һ����ʮ�����룬�ӕr�^����ȥ�z�yIO���ƽ�������׃��Ĭ�J��B(t��i)�����f���@���ڸɔ_���µİ��I���ӣ�����Ҫ̎������֮���t�������İ��I�����µ���̖�� ����(j��)ȥ����ԭ�����҂�Ҳ���l(f��)�F(xi��n)��ȥ�����ӕr�r�gҲ�����O��̫�L����t�����F(xi��n)�ӕr�Y(ji��)���r���I���ѽ�(j��ng)�����_���@�Ӿ͌����а��I�����
s�o���R�e�������o�ڌ��H������ǧ���f�e��Ҫ����(j��)���H���I�ķ�ʽ�Լ�Ӳ���·�ȶ������ȥ�`���\�ã������ϵ�ȥ��ԭ�t��һ��Ҫ��ѭ�ġ� ������ ��ͨ����ܛ���OӋ
��һ��(ji��) ������(sh��)����
��������(sh��)�����У����Ȇ�Ƭ�CҪ���F(xi��n)�����Ĵ����ij�ʼ�������r����ʼ���Լ���(sh��)�a�ܺͼt�G����B(t��i)�@ʾ���ƣ�������\���^���У���(sh��)�a����Ҫ�@ʾ��Ӌ�r�ĕr�g����Ƭ�C�����ö��r��T0��T1�M��Ӌ�r���O�ö��r���Д࣬���Дຯ��(sh��)�Ќ��r�g�M��ˢ�¡�����ϵ�y(t��ng)���I�ęz�y����ʹ����ѭ�h(hu��n)݆ԃ��ʽ��Ҳ���Բ����ⲿ�Д�̎����ʽ�����˸��ӿ��ٵ�푑����I��Ϣ���ڳ�����ͨ�^�ⲿ�Д��팍�F(xi��n)���I�ęz�y�� ����(j��)ϵ�y(t��ng)�����\�е����c������ÿ����ͨ���Ġ�B(t��i)���Ǐ�S1->S2->S3->S4->S1�����ѭ�h(hu��n)���ͣ��@Щ��B(t��i)�ǹ̶��ģ�����һ����B(t��i)�D(zhu��n)׃?y��u)���һ����B(t��i)�ėl��Ҳ�ǹ̶��ģ����ԣ��ھ��̕r���à�B(t��i)�C��̎����ʽ������m�ģ���B(t��i)�C������ͨ��߉�_��Ҫ����Ķ࣬Ҳ�����ڳ��F(xi��n)߉�ϵ��e�`��ֻ����Ҫ�Ѹ�����B(t��i)�����]�������Ҫ���Р�B(t��i)�ϵ�©������D4.1��ʾ��ϵ�y(t��ng)������(sh��)���̈D��
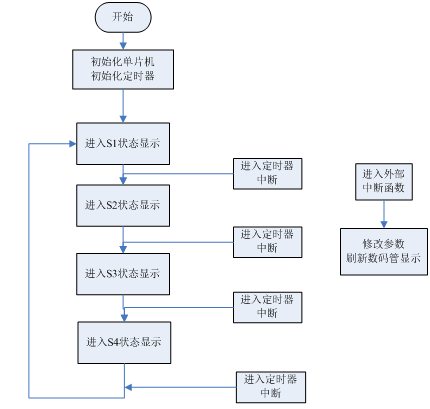
�D4.1 ϵ�y(t��ng)������(sh��)���̈D ��B(t��i)�C����ܛ�������OӋ�е�һ����Ҫ�ĸ�����磬һ�����o��������Ա�������һ����B(t��i)�C��һ����B(t��i)��A�����°��o���ГQ��B��B(t��i);Ȼ���|�l(f��)��һ���I�ГQ��C�Ġ�B(t��i)�����߷��صĠ�B(t��i)���@���P(gu��n)�I�Ġ�B(t��i)�C����ε����ӡ����H�����������@ЩҪ���s�Ķ࣬�����@����Ӱ��҂��Ġ�B(t��i)�C�����⡣���⣬���I�������Ա�������һ����B(t��i)�C��һ��С���I��������ጷţ����ӣ��]�ϣ����ӵȠ�B(t��i)�� Ҫ���C�����Ч��(w��n)�����\�У����˸�������ģ�K����߀��Ҫһ����Ҫ��ģ�K���ǿ��T�����چ�Ƭ�Cϵ�y(t��ng)�У������������IJ������ܕ��ܵ������ⲿ늴ň��ĸɔ_��ʹ����ʧ��������ѭ�h(hu��n)�У�����������\�б��Д࣬��MCU���Ƶ�ϵ�y(t��ng)�����^�m(x��)�������@����������ϵ�y(t��ng)ͣ�D����ɲ����A�ϵĺ������˞��ˌ����������\�Р�r�M�Ќ��r�O(ji��n)�أ���Ƭ�C����һ�����T��Ӳ���·���Q�����T������ ���뿴�T���·��Ŀ����ʹ���������Ԍ��F(xi��n)�B�m(x��)�����������M��������w����ѭ�h(hu��n)�����T������ģ�K�ǃ�(n��i)Ƕ�چ�Ƭ�C��(n��i)���ģ��c��Ƭ�C��I / O���_���B��ԓ���_����ͨ�^����Ŀ��ƣ��������Ƭ�C���_�ͳ����ƽ����ƽ��һ���ܵ��ɔ_����Ƭ�C�������w��������һ���o��ѭ�h(hu��n)�����T�����_�l(f��)���ƽ�Ĺ��ܲ��ܱ���(zh��)�У��@���r���T���·������ȱ����MCU�l(f��)������̖��������B��һ��ď�λ�·�����_�l(f��)��һ����λ��̖��ʹ���������ij���惦������ʼλ�È�(zh��)�д��a���@�Ӿ͌��F(xi��n)�ˆ�оƬ�Ԅӏ�λ�� ��ǰ�����T���·��Ҫһ������Ŀ��T��оƬ�B�ӵ���Ƭ�C�팍�F(xi��n)�������@��������s���·�OӋ���S�����g(sh��)�IJ����M�����F(xi��n)�ڵĆ�Ƭ�C��������(n��i)�ÿ��T���·�����T�����r���Ĵ������鿴�������Ĺ���֪�R�c��
�ڶ���(ji��) �Д����ģ�K
��Ƭ�C�Ķ��r�����Ը���(j��)�����O�õķ��l�l���M��Ӌ��(sh��)����Ӌ��(sh��)�_��ij���O��ֵ�r�����Ԯa(ch��n)��һ���Д��¼�������51��Ƭ�C�ⲿ����12M�����Ӌ��(sh��)�ɂ��ֹ�(ji��)��Ҳ����65535��Ӌһ����(sh��)�ĕr�g��1/12M�룬����Ӌ��(sh��)ֵ�O�����ֵ��65535��Ҳ������Ӌ�r1s����ˣ���Ҫ���M�붨�r�Д�Δ�(sh��)�M���ۼӣ������Д���Ӌ20�Σ��ͱ�ʾ��ǰӋ�r��20*65535/12M=0.109225s�������Ҫ�ӕr1s����Ҫ��Ӌ��(sh��)ֵ�O�Þ�60000����r�£��M���Д�200�Ρ� MCS-51�Ĺ����l��ͨ����r��12MHz���C�������c��Ƭ�C�����l�����P(gu��n)���C��������12���Ĺ����l�ʣ����һ���C�����ڵĕr�g�L�Ȟ�12 *��1 / 12MHZ��= 1�롣�҂�����֪��ÿ��ָ�����ڵ��ض���(sh��)Ŀ���@���҂��Ϳ�����һ��ָ���(zh��)�еĔ�(sh��)���_����Ҫ�ĕr�g�� �Д����֞鶨�r���Д���ⲿ�Дࡣ�Д��ʼ������(sh��)���Д�̎�����պ���(sh��)ģ�K���£� /**************���r��0��ʼ��*********************** * ���Q : Time0_Init() * ���� : ���r���ij�ʼ����12MZ����50ms * ݔ�� : �o * ݔ�� : �o ****************************************************/ void Time0_Init() { TMOD = 0x11; TH1 = 0xec; TL1 = 0x78; EA = 1; ET0 = 1; TR0 = 1; } /************�ⲿ�Д�0 �ij�ʼ��*********************** * ���Q : Outside_Init() * ���� : �ⲿ�Д�0 �ij�ʼ�� * ݔ�� : �o * ݔ�� : �o *******************************************************/ void Outside_Init(void) { EX0 = 1; //�_�ⲿ�Д�0 IT0 = 1; //ؓ߅���|�l(f��) EA = 1; //�_���Д� } /*****************���r��1*********************************** * ���Q : Time1_Int() * ���� : �@ʾ���r����������ʽ1 * ݔ�� : �o * ݔ�� : �o ****************************************************************/ void Time1_Int() interrupt 3 { TH1 = 0xec; TL1 = 0x78; TR1=1; if(key1<=3) display(); else ndisplay(); } �Д�0���ճ��� /****************�ⲿ�Д�0 ���պ���(sh��)******************************** * ���Q : Outside_Int() * ���� : �ⲿ�Д�0 ���Д�̎�� * ݔ�� : �o * ݔ�� : �o *******************************************************************/ void Outside_Int(void) interrupt 0 { EX0 = 0; delay(30); //�����I�M�п��ɔ_̎�� if(key1 < 6) { key1++;} else key1=0; delay(30); EX0 = 1; }
������(ji��) ��(sh��)�a���@ʾģ�K
��4.1�锵(sh��)�a���@ʾ��(sh��)���c�����εČ�������
��4.1 ��(sh��)�a�ܶ�λ���ձ�
���Ĺ�(ji��) ��ͨ���·
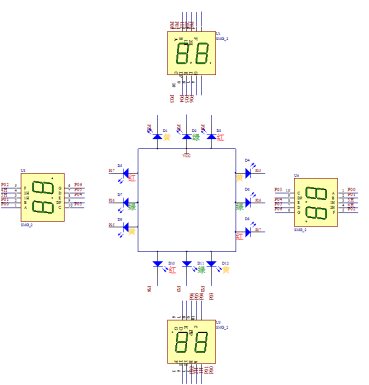
�OӋ�в��ðl(f��)����O�����齻ͨ���ʹ�ã���Ƭ�C��I/O�ӿ�ֱ�Ӻͽ�ͨ�����l(f��)����O�ܣ��B�ӡ���ʮ��·�ڵ��ĽM�t���S���G��ɫ��ͨ���У��|�������·�ϵăɽMͬɫ���B����һ���ϱ������·�ϵăɽMͬɫ�ğ�Ҳ�˴��B���ڣ��܆�Ƭ�CP2.2~P2.7���ơ���Ƭ�C��I/O�ӿ��c��ͨ���·�ľ��w�B�ӷ�ʽ�飺P2.5~P2.7�քe�Ӗ|������ļt���S���G��6���Ź���O�ܣ�P2.2~P2.4�քe���ϱ�����ļt���S���G��6���l(f��)����O�ܡ�12���l(f��)����O�ܲ����˹�ꎘO���B�ӷ�ʽ�����I/O��ݔ�����ƽ�r���c֮���B�İl(f��)����O�ܕ�����I/O��ݔ�����ƽ�r�������İl(f��)����O�ܕ��硣��ͨ���·ԭ��D���D��ʾ��
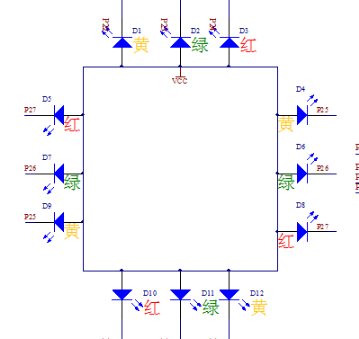 �D4.2��ͨ���·�D
���幝(ji��)��Ӌ�r�@ʾ���·
ԓ�@ʾ���x���pλ��(sh��)�a�܁��@ʾ��ͨ���D(zhu��n)�Q��ʣ���r�g������(j��)�OӋ��Ҫ��ÿ��·����Ҫ1����(sh��)�a�ܣ��@�Ӿ�Ҫ4����(sh��)�a�ܡ��҂������x�ù���͔�(sh��)�a�ܡ��Ă�·�ڵ�Ӌ�r�@ʾ������ͬһ�r���@ʾ��ͬ�Ĕ�(sh��)�֡��·���D 
�D4.3��Ӌ�r�@ʾ���·�D
������(ji��)��ͨ���OӋ���·�D
�҂��ѵ�Ӌ�r�@ʾ���·�D����Ƭ�C������Ӳ���B�������������˿����·�D�������ǽ�ͨ�����·�D��PCB�D��

�D4.4 ��ͨ�����·�D
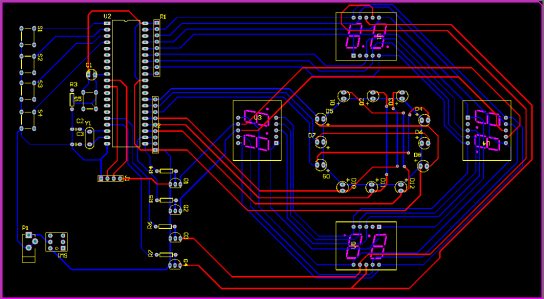 �D4.5 ��ͨ��PCB�D
������ Proteus����
��һ��(ji��) Proteusܛ����B
Proteusܛ����Ӣ��Labcenter electronics��˾�����EDA����ܛ���������H��������EDA����ܛ���ķ��湦�ܣ�߀�ܷ����Ƭ�C���������������Ŀǰ��õķ����Ƭ�C����������Ĺ��ߡ��mȻĿǰ����(n��i)�ƏV���������ܵ���Ƭ�C�ۺ��ߡ�����Ƭ�C�̌W�Ľ̎��������چ�Ƭ�C�_�l(f��)���õĿƼ������ߵ���A��Proteus��������������EDA����(����ܛ��)����ԭ��D���D�����a�{(di��o)ԇ����Ƭ�C�c����·�f(xi��)ͬ���棬һ�I�ГQ��PCB�OӋ���������F(xi��n)�ˏĸ���a(ch��n)Ʒ�������OӋ����Ŀǰ������Ψһ���·����ܛ����PCB�OӋܛ����̓�Mģ�ͷ���ܛ������һ���OӋƽ�_����̎����ģ��֧��8051��HC11��PIC10/12/16/18/24/30/DsPIC33��AVR��ARM��8086��MSP430�ȣ�2010�꼴������Cortex��DSPϵ��̎�����������m(x��)��������ϵ��̎����ģ�͡��ھ��g���棬��Ҳ֧��IAR��Keil��MPLAB�ȶ�N���g���������OӋ������ԓܛ���ɹ���������\�С�
�ڶ���(ji��) Proteus����DƬ
ܛ���\�к�ͨ���_ʼ���������O���@ʾ�t���S���G��ɫ����LED�@ʾ��Ӌ�r����ϵ�y(t��ng)�Ԅ��M���B(t��i)S1���v���ϱ����ɵ�����G�������M��|��֧�ɵ�����t�������ϱ����ɵ�LED��Ӌ�r12�룬�|��֧�ɵ�LED��Ӌ�r7���ϵ�y(t��ng)�M�루S1��S2��Ȼ���ϱ������S����3�룬�|������t���W�q������DƬ���¡�
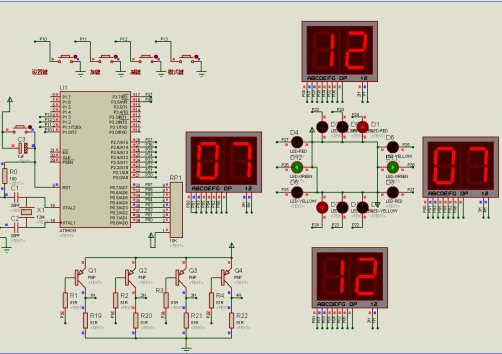
�D4.6 S1��B(t��i)
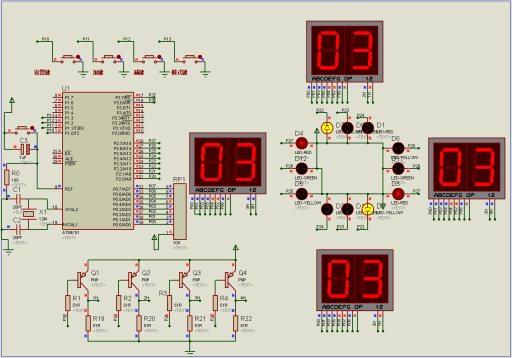
�D4.7 S1��S2
3��֮��ϵ�y(t��ng)�M��S3��B(t��i)���v���ϱ�����t�������M��|������G����������D���¡� 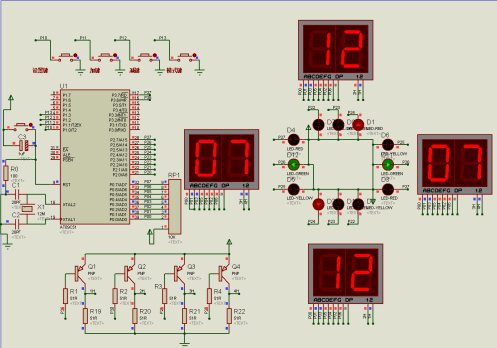
�D4.8 S3��B(t��i) 7���ϵ�y(t��ng)�M���D(zhu��n)�Q�A�Σ��v���ϱ�����t���W�q���M��|�������S����3�룬����D���¡�

�D4.9 �D(zhu��n)�Q�A��
������ �{(di��o)ԇ�ĵ�
������ϵ�y(t��ng)���{(di��o)ԇ�^���У�����������(j��ng)��ȱ������������Ӳ������߀��ܛ�����棬�������˺ܶ����}����(j��ng)�^��������Y�Ϻ��ώ�ͬ�W�Ď������K�ڌ����}һһ��Q�������Y(ji��)��һЩ��(j��ng)��Ӗ�� ���ӕr���Ⱥ����Դ���ֵ�����������l(f��)�F(xi��n)�Դ���ֹ���늉�������Ҫ������늣��z�麸�Ӿ��������ĺ��ӷ����Ƿ����_���_���Դ�������ٺ����·�������֣�����������������늉��p�ġ��������һ������ģ�K��l(f��)�F(xi��n)�{(di��o)ԇ�������r�����ȑ�ԓ�șz��ԭ��D�B���Ƿ����_���ڲ鿴ԭ��D�ͺ��ӵİ����Ƿ�һ�¡�����������_�ģ��͑�ԓ�_��ԭ��D��оƬ�փԵ����_�����Ƿ����_���z���Ƿ���©����̓�������_��·�ĬF(xi��n)����F(xi��n)����������ʾ����оƬ���_���ƽ�M�Мyԇ���ҵ����}���ڡ��Еr�҂����Ԍ��F(xi��n)��IO���D(zhu��n)���e����ȥ���Ƿ���IO�ڳ��F(xi��n)���}����ġ��ں��ӕr�����һ�Ӄɂ������M�Ќ��ȣ��ų�����˞麸��ԭ������e�`�l(f��)����ܛ����Ӳ�����{(di��o)ԇ�r���ϵģ�����������}�r��һ������Ӳ�����F(xi��n)���}���ϵ�y(t��ng)�e�`�� ܛ���{(di��o)ԇ���ȸ���(j��)ϵ�y(t��ng)�����wҪ���L�Ƴ�ϵ�y(t��ng)�ij������̈D������(j��)�������̈D������P(gu��n)Ҫ������KEIL���gܛ������C�Z�Ԍ�ϵ�y(t��ng)Ӳ���M���(q��)������Ҫ���Æ�Ƭ�C�����Ĵ����Ġ�B(t��i)���������P(gu��n)��IO�ڣ��{(di��o)ԇ�^���бM��ʹ��LED����^�������\�Р�B(t��i)���Д���Ƭ�CIO���Ƿ��Ѹ���(j��)�����Ҫ��ݔ���������ƽ�������^����(q��)�ӕr��Ҫע���·�Ŀ��ƣ��Ա����ⲿ��ݔ��ɔ_����Ƭ�Cϵ�y(t��ng)���Ӱ푣�ͬ�rϵ�y(t��ng)�\���^����Ҫ���翴�T�������������w�ĕr�r��λ��Ƭ�C����ϵ�y(t��ng)�܉��������\�У��ڰ��I�z�y�·�ĕr��Ҫע�⌦���I�Ķ�����ɳ����`������
�Y(ji��) Փ
ͨ�^�@���OӋ���Ҍ����W�Č��I(y��)֪�R���˸�������⣬�����dž�Ƭ�C���档��51��Ƭ�C�������˺ܶ���Y�Ϸ���ČW���������ˆ�Ƭ�C�Ļ��������ķ������Լ������{(di��o)ԇ�����̡����OӋ�^���У�����˴������������Y�ϣ���Q�˲����y�}��ʹ���ڷ������}��Q���}�������������������������ˌ��W�������ģ�������ӌ��I(y��)�a(ch��n)���˝����dȤ�������@�����Ժ�Ĺ����͌W������Ҫ�Ď����� �����OӋ�������F(xi��n)��51��Ƭ�C����ʮ��·�ڽ�ͨ�ȣ����F(xi��n)�����c܇���ķ�����Ŀ�ġ��\���˂��y(t��ng)��8λMCU������ȫ�桢�ɱ���r�͡��܉����Ҝ��°�ȫ�ɿ��\�У��\������ƈDܛ����KEIL����ܛ����ͬ�r���ϵ�y(t��ng)ԭ��D��MCU�ĵ��(q��)�Ӵ��a�ľ������܉����OӋ�^������Ɍ���ӌ��I(y��)�ĸ�����(ji��)�����ܵď��������Б����n�̵Č��`���ã����а�����Ƭ�C�n�̡���(sh��)���·��ģ�M�·����Ƭ�Cc�Z�Ծ��̵ĸ������I(y��)�n�̵ľC���\�ã����OӋ��ɕr�Ҍ��Լ������I(y��)���������п�Ŀ�M�еĺ��β�ȫ����\�С� ϵ�y(t��ng)���������;��������ƣ�����ϵ�y(t��ng)߀���ںܶ�IJ��㣬߀���Ԍ��F(xi��n)����ĔUչ��������Լ���һЩ�y����·��(j��ng)�^܇�v��(sh��)���Ă�����������(j��)�������Ĕ�(sh��)��(j��)���Ը������ܵČ��F(xi��n)���t�G���r�g���O�ã�ʹ��·�������ʸ��ߣ�߀���Ԍ���Ƭ�Cͨ�^�о���o������ʽ�c��ָͨ�]���Č��F(xi��n)ͨ�ţ�ʹָ�]���Ŀ��Ը���(j��)���H��ͨ��r���r���{(di��o)���t�G���ĕr�g����(sh��)�ȵȣ��ҕ����Ժ�ČW�����^�m(x��)����֪�R�wϵ���M���ܵĸ��Ʋ��㡣�S����Ƭ�C���g(sh��)���Mһ���l(f��)չ���@Щ���}�������^�m(x��)�о���Q��
�� �x
��(j��ng)�^�ׂ����Y�ϵIJ��Һ͌������I(y��)�OӋ���P(gu��n)֪�R�ČW�����ѽ�(j��ng)�������ϵ�y(t��ng)���OӋ�����@�����I(y��)�OӋ�^������¶�����S��Ć��}�����ڌ���Щ���I(y��)֪�R���˽ⲻ�����룬�OӋ��Щ����߀�Dz������ơ����ώ��Ď����£���Q�������ĺܶ��OӋ�y�}����ʹ�î��I(y��)�OӋ�܉��������ɡ��ٴΌ��ҵ�ָ���̎���ʾ����ĸ��x���ώ���æµ�Ĺ����У����Ү��I(y��)�OӋ���M�����ĵ�ָ�������OӋ����Ҳ����Y�ϵĕr�o�Һܴ�������ڱ�����Y������������Ҫ��֪�R�����c���ڮ��I(y��)�OӋ�����������ϵ�y(t��ng)���OӋ�����ͽ�Q�������ώ����ҵ��OӋ�����M�����u����ָ���ҷ����г��F(xi��n)���ҵĆ��}��������ˌ��F�Ľ�(j��ng)�ڮ��I(y��)�OӋ���ڌ����OӋ�·�ͳ����M����ָ����ʹ�Ҍ���Ƭ�CӲ���·��ܛ���������˸�������˽⡣���ҷ������OӋ׃�ú�����ϵ�y(t��ng)���ܸ�������������ܵ��ˏ������ώ�������ϵ�y(t��ng)ȫ�ֽy(t��ng)�I�Ժ���ʹ��Ҳ���ЌW���ܶ����n���όW�����OӋ��(j��ng)�ڴˣ������ώ��ć�֔?sh��)��ΌW�B(t��i)�Ⱥ͌��W��ؓ؟�đB(t��i)�ȱ�ʾ����J�塣��Ό�����һ�������O��ͬ�W��ʾ����ĸ��x�������������}�r�����ҽ�Q�ö�������֮������y������]�������Ď��������@ô���������Ү��I(y��)�OӋ��
�����x��W�������n�̎������������ڌWУ�����������ĵĂ�����֪�R�����ҵĸ��������������B(y��ng)����̫����D���������������Ժ�Ĺ����и��õČW�������ˈԌ��Ļ��A��ͬ�r���x���е�ͬ�W����ʽ���ゃ�Ą��֧�֣������������I(y��)�OӋ�@�Εr�g����ĵ�ȱ�c��Ŭ���İ��ҵĮ��I(y��)�OӋ�J�����ɡ�
��Ƭ�CԴ��������:
- <font style="font-size: 12pt">#include <reg52.h> //�{(di��o)�Æ�Ƭ�C�^�ļ�
- #define uchar unsigned char //�궨�x"uchar"����"unsigned char"��
- #define u8 unsigned char //�궨�x"uchar"����"unsigned char"��
- #define uint unsigned int //�궨�x"uint"�Á����x�o��̖���͔�(sh��)��
- //�����ϱ����ɵ�
- //���Җ|���o�ɵ�
- u8 code DisplayOther[]={
- 0xff, //0 ��
- 0x7f, //1 "."
- 0xbf, //2 "-"
- 0xa7 //3 c
- };
- //��(sh��)�a�ܶ��x���x 0 1 2 3 4 5 6 7 8 9 A b C d E F -
- uchar code smg_du[17] = {
- 0xc0, //0
- 0xf9, //1
- 0xa4, //2
- 0xb0, //3
- 0x99, //4
- 0x92, //5
- 0x82, //6
- 0xf8, //7
- 0x80, //8
- 0x90, //9
- 0x88, //A
- 0x83, //b
- 0xc6, //C
- 0xa1, //d
- 0x86, //E
- 0x8e //F
- };
- uchar dis_smg[8 ] = {0xc0,0xf5,0x8c,0x94,0xb1,0x92,0x82,0xf4};
- uchar smg_i = 4; //�@ʾ��(sh��)�a�ܵĂ�λ��(sh��)
- //��(sh��)�a��λ�x���x
- sbit smg_we1 = P2^0; //�|����(sh��)�a��2
- sbit smg_we2 = P2^1; //�|����(sh��)�a��1
- sbit smg_we3 = P2^3; //�ϱ���(sh��)�a��2
- sbit smg_we4 = P2^2; //�ϱ���(sh��)�a��1
- char dx_s = 0; //�|�� �ϱ� ��Ӌ�r׃��
- sbit nb_red = P1^0; //�ϱ��t��
- sbit nb_green = P1^2; //�ϱ��G��
- sbit nb_yellow = P1^1; //�ϱ��S�� 1
- sbit dx_red = P1^3; //�|���t��
- sbit dx_green = P1^5; //�|���G��1
- sbit dx_yellow = P1^4; //�|���S��1
- uchar flag_jtd_mode; //��ͨ����ģʽ ����(j��)�r�g
- bit flag_1s = 1; //�M���ϱ������ГQ�Ę�־λ
- bit flag_500ms;
- bit flag_dx_nb; //�|���ϱ�ģʽ
- uchar flag_5m_value;
- uchar i;
- uchar flag_alarm; //ģʽ
- //uchar dx_time = 30,nb_time = 20; //�|�����ϱ��ĕr�g
- uchar dx_time = 20,nb_time = 30; //�|�����ϱ��ĕr�g
- uchar flag_jdgz ; //��ͨ����
- /********************************************************************
- * ���Q : u8 ChangeFor(u8 dat)
- * ���� : ���Qһ���ֹ�(ji��)λ��λ��,���ڔ�(sh��)�a���@ʾ
- * ݔ�� : ��Ҫ��׃�Ĕ�(sh��)
- * ݔ�� : ��׃��Ĕ�(sh��)
- ***********************************************************************/
- #define LED_a 6 //��(sh��)�a�ܶ��x��a�ν��ڶ��xIO�ڵĵ�0λ
- #define LED_b 5
- #define LED_c 0
- #define LED_d 2
- #define LED_e 1
- #define LED_f 4
- #define LED_g 3
- #define LED_dp 7
- u8 ChangeFor(u8 dat)
- {
- u8 temp=0;
- if(dat&0x01) //�Д���(sh��)��(j��)�ĵ�һλ�Ƿ��1
- temp|=0x01<<LED_a;//�����1,�ŵ����Ɣ�(sh��)�a��a�ε�λ��
- if(dat&0x02)
- temp|=0x01<<LED_b;
- if(dat&0x04)
- temp|=0x01<<LED_c;
- if(dat&0x08)
- temp|=0x01<<LED_d;
- if(dat&0x10)
- temp|=0x01<<LED_e;
- if(dat&0x20)
- temp|=0x01<<LED_f;
- if(dat&0x40)
- temp|=0x01<<LED_g;
- if(dat&0x80)
- temp|=0x01<<LED_dp;
- return temp;
- }
- /***********************��(sh��)�aλ�x����(sh��)*****************************/
- //i: 0,�|����(sh��)�a��2
- // 1,�|����(sh��)�a��1
- // 2,�ϱ���(sh��)�a��2
- // 3,�ϱ���(sh��)�a��1
- void smg_we_switch(uchar i)
- {
- switch(i)
- {
- case 0: smg_we1 = 0; smg_we2 = 1; smg_we3 = 1; smg_we4 = 1; break;
- case 1: smg_we1 = 1; smg_we2 = 0; smg_we3 = 1; smg_we4 = 1; break;
- case 2: smg_we1 = 1; smg_we2 = 1; smg_we3 = 0; smg_we4 = 1; break;
- case 3: smg_we1 = 1; smg_we2 = 1; smg_we3 = 1; smg_we4 = 0; break;
- }
- }
- /********************************************************************
- * ���Q : delay_1ms()
- * ���� : �ӕr1ms����(sh��)
- * ݔ�� : q
- * ݔ�� : �o
- ***********************************************************************/
- void delay_1ms(uint q)
- {
- uint i,j;
- for(i=0;i<q;i++)
- for(j=0;j<110;j++);
- }
- /********************************************************************
- * ���Q : display()
- * ���� : ��(sh��)�a���@ʾ
- * ݔ�� : �o
- * ݔ�� : �o
- ***********************************************************************/
- void DisplayScan()
- {
- static uchar i;
- // if(T_MS_SCAN>=3)
- {
- {
- P0 = 0xff; //���[
- smg_we_switch(i); //λ�x
- P0 = ChangeFor(dis_smg[i]); //���x
- delay_1ms(3);
- }
- i++;
- if(i>=4)
- i=0;
- // T_MS_SCAN=0;
- }
- }
- /*********************���r��0�����r��1��ʼ��******************/
- void time0_init()
- {
- TMOD = 0x01; //�O�ö��r��0�鹤��ģʽ1 (16-bit)
- TL0 = 15536; //�o���r����λ�x��ʼֵ 65536-15536=50000us=50ms,��50msһ���Д�
- TH0 = 15536 >> 8; //�o���r����λ�x��ʼֵ
- TR0 = 1; //�_�����r��0
- ET0 = 1; //���S���r��0��
- EA = 1; //�_��ȫ���Д�
- }
- /*********************��ͨ��̎������(sh��)*********************************/
- void jiaotongdeng_dis()
- {
- if(flag_1s == 1)//����ГQ��־��1
- {
- flag_1s = 0; //�����־λ
- if(dx_s == 0)
- {
- if(flag_dx_nb == 1)
- dx_s = nb_time; //�ϱ��r�g
- else
- dx_s = dx_time; //�|���r�g
- flag_dx_nb = ~flag_dx_nb; //�ГQ�ϱ��r�g
- }
- dx_s --;
- }
- /***********************�ϱ��r�g*********************************/
- if(flag_dx_nb == 0)
- {
- if(dx_s > 3)
- {
- dis_smg[0] = smg_du[dx_s % 10] ;
- dis_smg[1] = smg_du[dx_s / 10] ;
- dis_smg[2] = smg_du[(dx_s-3) % 10] ;
- dis_smg[3] = smg_du[(dx_s-3) / 10] ;
- dx_red = 1; //��
- dx_yellow = 1; //��
- nb_green = 1; //��
- nb_yellow = 1; //��
- dx_green = 0; //��
- nb_red = 0; //��
- flag_5m_value = 0;
- }else if(dx_s <= 3) //��С��3��r �S��Ҫ�W��
- {
- dis_smg[0] = smg_du[dx_s % 10] ;
- dis_smg[1] = smg_du[dx_s / 10] ;
- dis_smg[2] = smg_du[dx_s % 10] ;
- dis_smg[3] = smg_du[dx_s / 10] ;
- dx_red = 1; //��
- dx_green = 1; //��
- nb_green = 1; //��
- nb_yellow = 1; //��
- nb_red = 0; //��
- if(flag_500ms == 0)
- {
- dx_yellow = 0;//��
- }
- else
- {
- dx_yellow = 1;//��
- }
- }
- }
- /***********************�|���r�g*********************************/
- if(flag_dx_nb == 1)
- {
- if(dx_s > 3)
- {
- dis_smg[2] = smg_du[dx_s % 10] ;
- dis_smg[3] = smg_du[dx_s / 10] ;
- dis_smg[0] = smg_du[(dx_s-3) % 10] ;
- dis_smg[1] = smg_du[(dx_s-3) / 10] ;
- dx_red = 0; //��
- nb_green = 0; //��
- nb_yellow = 1; //��
- dx_green = 1; //��
- dx_yellow = 1; //��
- nb_red = 1; //��
- flag_5m_value = 0;
- }else if(dx_s <= 3) //��С��3��r �S��Ҫ�W��
- {
- dis_smg[0] = smg_du[dx_s % 10] ;
- dis_smg[1] = smg_du[dx_s / 10] ;
- dis_smg[2] = smg_du[dx_s % 10] ;
- dis_smg[3] = smg_du[dx_s / 10] ;
- dx_red = 0; //��
- dx_green = 1; //��
- dx_yellow = 1; //��
- nb_red = 1; //��
- nb_green = 1; //��
- if(flag_500ms == 0) //�S���W�q
- {
- nb_yellow = 0; //��
- }
- else
- {
- nb_yellow = 1; //��
- }
- }
- }
- }
- uchar key_can; //���Iֵ
- //���I
- sbit Key1=P1^6; //�O���I
- sbit Key2=P1^7; //�Ӱ��I
- sbit Key3=P3^2; //�p���I
- sbit Key4=P3^3; //��ͨ�����I
- //========================================================================
- // ����(sh��): u8 Key_Scan()
- // ����: temp=u8 Key_Scan();
- // ����: ���I���貢���ذ��µ��Iֵ
- // ����(sh��): NONE
- // ����: ���µ��Iֵ
- // �汾: VER1.0
- // ����: 2015-05-29
- // ��ע: ԓ����(sh��)�����֙z�y,�����I����һ���Iֵ��0,ֱ���ڶ��ΰ��I����
- //========================================================================
- u8 Key_Scan()
- {
- static u8 key_up=1;//���I�����_��־
- if(key_up&&(Key1==0||Key2==0||Key3==0||Key4==0))
- {
- delay_1ms(10);//ȥ����
- key_up=0;
- if(Key1==0) return 1;
- else if(Key2==0)return 2;
- else if(Key3==0)return 3;
- else if(Key4==0)return 4;
- }
- else if(Key1==1&&Key2==1&&Key3==1&&Key4==1)
- key_up=1;
- return 0;// �o���I����
- }
- uchar flag_s;
- uchar menu_1;//�v�M�Ӝp��ʾ
- /********************�O�ú���(sh��)*****************/
- void key_with()
- {
- if(key_can == 4) //��ͨ���ư��I
- {
- flag_jdgz ++;
- if(flag_jdgz > 5)
- flag_jdgz = 0;
- if(flag_jdgz == 1) // ȫ�����t��
- {
- dx_red = 0; //��
- nb_red = 0; //��
- dx_green = 1; //��
- dx_yellow = 1; //��
- nb_green = 1; //��
- nb_yellow = 1; //��
- }
- if(flag_jdgz == 2) // �|���G�� �ϱ��t��
- {
- dx_red = 0; //��
- nb_green = 0; //��
- dx_green = 1; //��
- dx_yellow = 1; //��
- nb_red = 1; //��
- nb_yellow = 1; //��
- }
- if(flag_jdgz == 3) // �ϱ��G�� �|���t��
- {
- dx_green = 0; //��
- nb_red = 0; //��
- dx_red = 1; //��
- dx_yellow = 1; //��
- nb_green = 1; //��
- nb_yellow = 1; //��
- }
- if(flag_jdgz == 4) // �ϱ��G�� �|���G��
- {
- dx_green = 0; //��
- nb_green = 0; //��
- dx_red = 1; //��
- dx_yellow = 1; //��
- nb_red = 1; //��
- nb_yellow = 1; //��
- }
- if(flag_jdgz == 5) // �ϱ��S�� �|���S��
- {
- dx_red = 1; //��
- dx_green = 1; //��
- nb_red = 1; //��
- nb_green = 1; //��
- nb_yellow = 0; //��
- dx_yellow = 0; //��
- }
- }
- if(key_can == 1) //�O���I
- {
- menu_1 ++;
- if(menu_1 >= 3)
- {
- menu_1 = 0;
- }
- }
- if(menu_1 == 1) //�O�Ö|���ĕr�g
- {
- if(key_can == 2)
- {
- dx_time ++ ; //��1
- if(dx_time > 99) //�r�g���ֵ��99s
- dx_time = 99;
- }
- if(key_can == 3)
- {
- dx_time -- ; //�p1
- if(dx_time <= 5)//�r�g��Сֵ��5s
- dx_time = 5;
- }
- dis_smg[0] = smg_du[(dx_time-1) % 10] ; //�@ʾ��A
- dis_smg[1] = smg_du[(dx_time-1) / 10] ; //�@ʾ��A
- dis_smg[2] = DisplayOther[2] ; //�@ʾ�|���O�õĕr��
- dis_smg[3] = DisplayOther[2] ;
- }
- if(menu_1 == 2) //�O���ϱ��ĕr�g
- {
- if(key_can == 2)
- {
- nb_time ++ ; //��1
- if(nb_time > 99)//�r�g���ֵ��99s
- nb_time = 99;
- }
- if(key_can == 3)
- {
- nb_time -- ; //�p1
- ����������������
- �����������ڱ���ƪ�� ���´��aՈ��51�����d������������
 ��ͨ��ȫ���Y��.7z
(5.65 MB, ���d��(sh��): 782)
��ͨ��ȫ���Y��.7z
(5.65 MB, ���d��(sh��): 782)
2021-12-23 00:18 �ς�
�c���ļ������d����
���d�e��: �ڎ� -5
| 



 [����朽�]
[����朽�]

 ����TQQ:125739409;���g(sh��)����QQȺ281945664
����TQQ:125739409;���g(sh��)����QQȺ281945664





 QQ���Ѻ�Ⱥ
QQ���Ѻ�Ⱥ QQ���g
QQ���g �vӍ��
�vӍ�� �vӍ����
�vӍ���� �ղ�
�ղ� ����
���� �
� ��
��