課程名稱:數字電子技術
課題名稱:汽車尾燈控制電路
一、任務及要求 任務: 假設汽車尾部左右量測各有3個指示燈(用發光二極管模擬)1. 汽車正常運行時指示燈全滅;2.右轉彎時,右側3個指示燈按右循環順序點亮;.3. 左轉彎時,左側3個指示燈按左循環順序點亮;4.臨時剎車時所有指示燈同時閃爍。
要求:1.設計思路清晰,給出整體設計框圖,畫出整機原理圖;2.給出具體設計思路,設計各單元電路、電路器件;3.總電路設計;4.進行實驗仿真調試,驗證設計結果;5.編寫設計說明書;6.所有圖紙和說明書用計算機打印
二、進度安排 第一周: 周一:布置任務,查找資料; 周二~周三:設計系統方案,仿真; 周四~周日:領元器件,電路安裝,或程序調試; 第二周: 周一~周二:電路安裝,調試,運行或程序調試,下載運行; 周三:結果驗收; 周四:收元器件,整理實驗室,撰寫報告,答辯; 周五:資料整理。 三、參考資料 1、數字電子技術基礎(第六版) 主編;閻石 高等教育出版社 2、電子技術與LED技術實驗與仿真 主編;郭照南 孫勝麟 中南大學出版社
目錄 一、課程設計的任務要求: 1 二、設計方案: 1 尾燈與汽車運行狀態表 1 設計總框 1 汽車尾燈控制邏輯功能表 2 汽車尾燈控制電路原理框圖 2 三、單元電路(子模塊,子程序)分析: 2 1、三進制計數器 3 2.開關控制電路 3 3.譯碼器74LS138 4 4.555定時器多諧震蕩電路構成信號源 5 四、系統仿真/測試: 5 五、電路安裝調試: 7 六、 元件清單: 7 七、總 結: 8 電子技術課程設計評分標準 9
一、課程設計的任務要求:設計目的: 假設汽車尾部左右量測各有3個指示燈(用發光二極管模擬)1. 汽車正常運行時指示燈全滅;2.右轉彎時,右側3個指示燈按右循環順序點亮;.3. 左轉彎時,左側3個指示燈按左循環順序點亮;4.臨時剎車時所有指示燈同時閃爍。
設計要求:1.設計思路清晰,給出整體設計框圖,畫出整機原理圖;2.給出具體設計思路,設計各單元電路、電路器件;3.總電路設計;4.進行實驗仿真調試,驗證設計結果;5.編寫設計說明書;6.所有圖紙和說明書用計算機打印
二、設計方案:尾燈與汽車運行狀態表 表1 當S1=0.S0=0時,正常運行。當S1=0,S2=1時,右轉彎。 當S1=1,S2=0時,左轉彎。當S1=1.S2=1時,剎車。 設計總框 用6LED燈來模擬汽車的尾燈,左邊三個,右邊三個。 當汽車正常行駛,六個燈全部熄滅。 當汽車右轉彎時,右側3個指示燈循環順序點亮。 當左轉彎時,左側3個指示燈循環順序點亮。(用三進制記數器,控制左右轉彎時,三個燈的循環點亮,譯碼電路與開關電路控制左燈.右燈) 當汽車剎車時,六個燈全部閃爍。(時鐘CP控制) 所以按照設計要求此汽車尾燈控制電路是由三進制計數器、譯碼電路、顯示驅動電路和開關控制電路等電路組成。 汽車尾燈控制邏輯功能表 表2
Cp信號由信號發生器提供。利用3-8譯碼器74LS138芯片,實現對初始循環信號進行譯碼,實現車燈按照要求來循環點亮。最后由兩個開關設計組合邏輯電路,控制尾燈電路,即可實現所需功能。

0.png (9.97 KB, 下載次數: 223)
下載附件
2018-12-5 02:46 上傳
圖1 三、單元電路(子模塊,子程序)分析:
1、三進制計數器選用74LS160芯片并用置數法,設計成三進制。 由74LS160功能知LD為置數端,CR為清零端。用置數法時,應將CR ENT還有ENP接高電平。由同步置數公式Nb=Na+M-1,三進制M應為3,置入數Na為0,代入公式得Nb=2。 即應將QB接入與非門,與非門輸出端接LD端。這就構成了三進制計數器,下圖為三進制仿真圖,圖2。 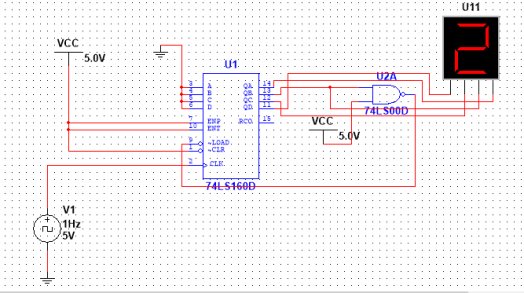
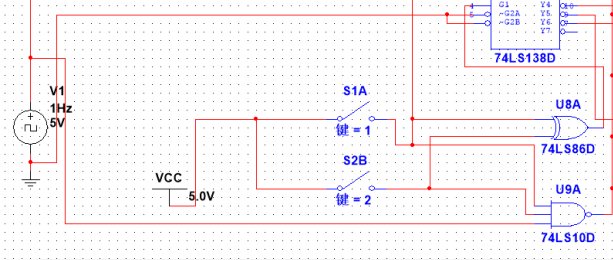
圖2 2.開關控制電路當兩個開關斷開時,表示汽車正常行駛指示燈滅; 當第一個開關閉合時,表示右轉彎,右側三個指示燈依次循環點亮; 當第二個開關閉合時,表示左轉彎,左側三個指示燈依次循環點亮; 當兩個開關同時閉合時,表示剎車,所有燈閃爍。 開關電路真值表 表3 | | | | | | | | | | | | | | | | | | |  1 | | | | | |
圖3為開關部分仿真圖
74LS138和顯示驅動電路的使能端信號分別為G和A。 邏輯表達式為 G=S1⊕S0
 A=S0S1  圖3 3.譯碼器74LS138 譯碼電路由3-8線譯碼器74LS138(如圖4)和6個與非門構成。74LS138的三個輸入端A2、A1、A0分別接S1、Q1、Q0,而Q1Q0是三進制計數器的輸出端。當S1=0、S0=1,使能信號A=G=1,計數器的狀態為00,01,10時,74LS138對應的輸出端0Y,1Y,2Y依次為0有效(4Y,5Y,6Y信號為“1”無效),即反相器G1~G3的輸出端也依次為0,故指示燈D1→D2→D3按順序點亮示意汽車右轉彎。若上述條件不變,而S1=1、S0=0,則74LS138對應的輸出端4Y、5Y、6Y依次為0有效,即反相器G4~G6的輸出端依次為0,故指示燈D4→D5→D6按順序點亮,示意汽車左轉彎。當G=0,A=1時,74LS138的輸出端全為1,G6~G1的輸出端也全為1,指示燈全滅燈;當G=0,A=CP時,指示燈隨CP的頻率閃爍。 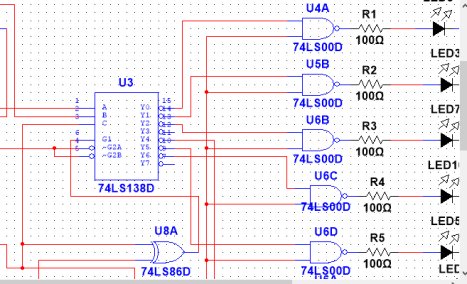 圖4 4.555定時器多諧震蕩電路構成信號源由于555定時器構成的多諧振蕩器的振蕩頻率穩定,不易受干擾。而且本實驗中控制電路對脈沖精度要求不高,只要能實現可調即可。故選擇采用NE555構成多諧振蕩器作為脈沖電路。輸出頻率為f=1.43/(R1+2R2)C。當取R1=10K,R2=510K,C=1Uf時可算出產生的頻率為1hz。即使得周期為1s。 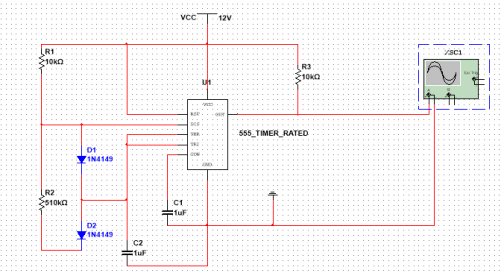 圖5 四、系統仿真/測試:- 當汽車正常運行時,S1=S0=0,使G=0,W=1,74LS138的輸出端全為1,G6~G1的輸出端也全為1,指示燈全滅燈。
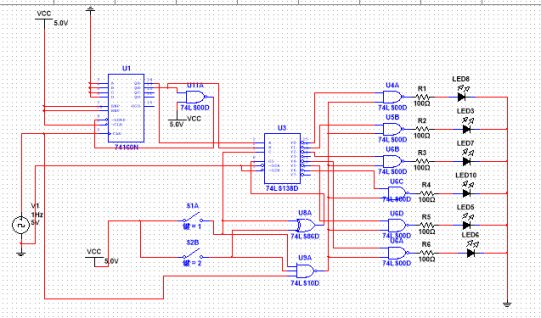 圖6 2.汽車左拐時,S1=1,S0=0時,使得A=G=1,74LS138對應的輸出端4Y、5Y、6Y依次為0有效,即反相器G4~G6的輸出端依次為0,故指示燈D4→D5→D6按順序點亮,示5意汽車左轉彎。 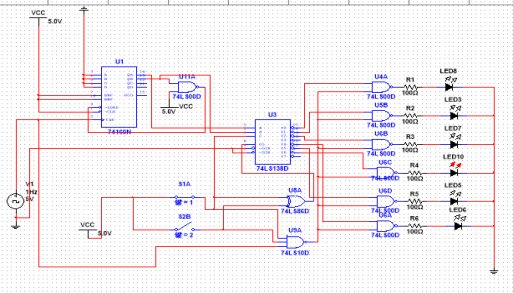
圖7 3.汽車右拐時,S1=0,S0=1時,使能信號A=G=1,計數器的狀態為00,01,10時,74LS138對應的輸出端0Y,1Y,2Y依次為0有效(4Y,5Y,6Y信號為“1”無效),即反相器G1~G3的輸出端也依次為0,故指示燈D1→D2→D3按順序點亮示意汽車右轉彎如圖 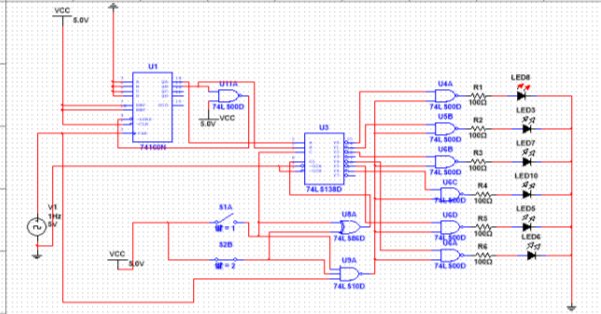
圖8 4.當汽車剎車時,S1=S0=1時,G=0,A=CP,指示燈隨CP的頻率閃爍 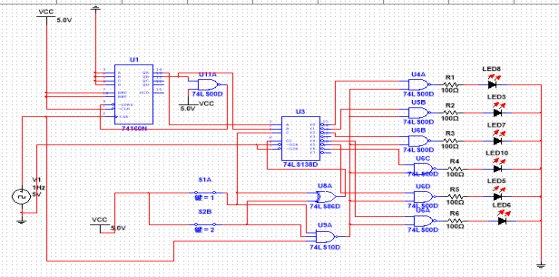
圖9 五、電路安裝調試: 在電路連接中,連接了4次才成功。每次左轉彎右轉彎時有幾個燈不符合仿真效果,而剎車隨時鐘信號CP亮時,是正確的。剛開始我們以為接錯了,就重新接了。重新接之后還是沒改變這個尷尬的情況。我們小組經過討論后,認為可能是元器件一損壞,接下來將每個元器件進行功能測量,最后發現沒有元器件損壞。這些問題都排除,就只剩下線路接觸不良。我發現有些電線插入孔時,可以左右搖擺,從而導致調試不成功。我們將這種線不用進行接線,最后調試成功。圖10為調試成功時的情況. 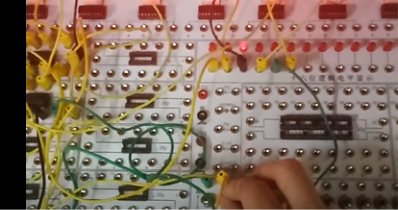 圖10 6、元件清單:表4 七、總 結:課程設計是一個檢驗與增長知識的一個課堂。通過本次實驗,我對汽車尾燈進行了設計并仿真完成。這將書本上的知識利用到實際的分析解決問題中去,這樣使我們更加牢固的掌握分析與設計的基本知識與理論,更加熟悉的各種不同規模的邏輯器件,掌握邏輯電路的分析和設計的基本方法,為以后的學習奠定基礎。 老師給我們講解原理時,我們發現這次課程設計并不難。但到自己實踐時,會發現總是遇到阻礙。需要將數電課本上的知識運用進來。在設計時我發現先要進行每個模塊的設計,然后再將每個模塊聯合起來。所有我首先要分析汽車尾燈顯示狀態與汽車運行狀態的關系,然后對汽車尾燈控制器進行功能描述,確定汽車尾燈控制器的結構框圖,最后進行電路設計。在電路設計過程中,先進行模式控制電路的設計,然后用到了74LS160構造一個三進制計數器,再進行開關的設計,再設計譯碼與顯示電路,最后用6個發光二極管組成尾燈狀態顯示電路,各個結構的電路設計好了之后,組合起來就設計好了汽車尾燈控制器的邏輯電路。 通過這次課程設計使我懂得了理論與實際相結合是很重要的,只有理論知識是遠遠不夠的,只有把所學的理論知識與實踐相結合起來,從理論中得出結論,才能真正為社會服務,從而提高自己的實際動手能力和獨立思考的能力。
圖片1.png (24.43 KB, 下載次數: 276)
下載附件
2018-12-4 20:03 上傳
完整的Word格式文檔51黑下載地址:
 數字電子技術課程設計.doc
(473.33 KB, 下載次數: 100)
數字電子技術課程設計.doc
(473.33 KB, 下載次數: 100)
2018-12-4 20:05 上傳
點擊文件名下載附件
下載積分: 黑幣 -5
| 








 QQ好友和群
QQ好友和群 QQ空間
QQ空間 騰訊微博
騰訊微博 騰訊朋友
騰訊朋友 收藏
收藏 淘帖
淘帖 頂
頂 踩
踩

