�߾��ȼ���y�࣬��λ��ԭ�����㷨���F
��λ������y�����Փ�OӋ ժҪ���Ľ�B�˰댧�w���⼼�g,���ڂ��y����λ������y��ԭ���Ļ��A��, ��������y���Wϵ�y�OӋ,�\�Ô������P�z�y�Ĝy�����������һ�N��ֱ�Ӕ����l�ʺϳ�(DDS) ���g�͔�����̖̎��(DSP) ���g��Y�ϵ��µ���λ����y����Փ�OӋ���@�N�OӋ�����ں����·�������λ�y��ľ��ȡ�
Ŀ���һ�� ���� �ڶ��� �������о���r ������ ����y���Wϵ�y 3��1 ����y���x��ϵ�y�Y�� 3��2��Wϵ�y�Dʾ 3��3 ��Wϵ�y�OӋ��Ҫ���������c���� 3��4 ��Ҫ�������ܔ��� ������ �������P�z�y���g���M�����OӋ 4��1 ������λʽ�y��Ļ���ԭ�� 4��2 ������̖̎��(DSP)�ĺ��� 4.2.1 ������̖̎������Ҫ�о����� 4.2.2 �yԇ��̖���ֻ�̎���Ļ������E 4.2.3 ����̎����̖�ă��� 4��3 ֱ�Ӕ����l�ʺϳɼ��g 4.3.1 DDS�Ļ�������ԭ�� 4��4 ���M�Ĕ��֜y��Ŀ�D�OӋ ������ С�Y ���������ġ��I ���x
��һ�� ���� ���⣬��һ�N��Ȼ��ԭ�������ڵģ����ܼ����l���ľ��з����Ժá����ȸߡ���ɫ�Ժú�����Ժõ����ԵĹ⡣����W�ҰѮa������ęC����Դ��1917�����˹̹��ጺ��wݗ�䶨�ɕr����ļ��f����������պͰl��ɽ����ܼ����ա��ܼ�ݗ����lݗ�����N�����^��[1]�� ���^���⼼�g������̽���_�l���N�a������ķ����Լ�̽�����ü�����@Щ���Ԟ�����츣�ļ��g�Ŀ��Q��30����������⼼�g�õ�ͻ�w���M�İlչ�����ü��⼼�g���H�����˸�����ɫ�Ķ�N���ӵļ������������S�����⑪���I����չ���γ��˼��⳪�P���C�������t��������ӹ�������ȫϢ���ࡢ��������ӡˢ�������ӡ�Լ�����������һϵ�����d�a�I�����⼼�g���w�ٰlչ��ʹ��ɞ鮔���¼��g���������h�� �������ͨ��ĸ�����ͬ��������һ�N�кܸ߹��Ӻ����ȵĹ⡣���Ӻ����ȿ�������������ͬģʽ(���͡�λ�ࡢ���L)�Ĺ��Ӕ�Ŀ,��������ͬ��B�Ĺ��Ӕ�Ŀ���@Щ����ʹ����������õĜ�ֱ�Լ��dz�С�İlɢ��,ʹ�x�����M���c���c�Ĝy��,�m���dz��MС�͏��s�Ĝy���h��������y���x�������ü������õĜ�ֱ�Լ��dz�С�İlɢ�Ƕȁ�y�����x��һ�N�x����������A��B ���c�g����һ������r�g��t, �tA��B ���c�g���xD �ɱ�ʾ��: D = c��t /2,ʽ��, c����ڴ���Ђ������ٶȡ����ڹ��٘O��, ����һ����̫���D ���f, t��һ����С��������:���OD =15km, c = 3 ��105 km / s,�tt = 5 ��10- 5 s���ɜy�ʽ��֪,��ξ��_�y�����r�gt��ֵ�ǜy����P�I�� ���ڜy���r�gt�ķ�����ͬ,��a���˃ɷN�y���:�}�_�y�����λ�y�ࡣ������λ�y����Ӿ��_[1]��
�ڶ��� �������о���r ��λʽ����y�༼�g���о���ʼ��20 ���o60���ĩ,��80 ���������m��Q�˼�����������Wϵ�y����̖̎���·�е��P�I���g,80 ��������D�둪���о��A��,�����Ƴ��˸��N��ͬ��;�ĘәC,90�������,���N����ĮaƷ������F,�AӋ���ڌ����䑪�îaƷ��lչ���A��,���С����̼���y�����÷�����ȡ��YAG�����څ�ݡ��S�����⼼�g�İlչ, ���ü��������ܹⲨ�y��ϵ�y�Ĺ�Դ, �ǬF���y���x����һ���@�����c�� ��������Y��, �������ڴ�y�������к��̜y���ĸ��늜y���x�s15000���_������, �L�̼��г̸�ռ1/4, �̳̜y���xռ1/2���S��I�l�_�����ѰѸ��N����y���x�t��y���x����˜��O��, �b��y�����Iꠡ� ����������L�̼���y���x�ļ��g�lչ���������c: ��1�� �ձ����He -Ne�����Դ, ���ʞ�1��5mW; ��2�� �ձ�����·f�ĸ�Ч�{����,��ADP(��������@NH4H2PO4), KDP(��������(KH2PO4)), KD*P(�������(KD2PO4))�ȣ���3�� ���Ԅӻ��͔��ֻ�����lչ�����h�̼���y���x�ľ�����Ҫ���ܵ������`�������, �@��ֵ��ע��ġ���������Geodolit-3G�h�̼���y���x, �䔵�֜y��ķֱ����_��0.03 mm, ��̶��`����0.03 mm, �����ı����`������1 mm/km[2]�� ��@�Üy����ƽ�����, �≺������`��Ӱ푡�1mm/km�� ߀��Ҫ���w�C�y��������y��, �@�����I�o���Dz�����ġ�����֮��, ��0.03 mm�Ĝy��ֱ���, ���چ�ɫ������h�̜y��, �������衣 �̵̳ĹⲨ�y���xͨ�����黯扰댧�w(GaAs)�t�Ⲩ�μ���Դ�ļt��y���x����, ������Ҳ����������He -Ne��������Դ���@x���ձ������Ԅӻ������ֻ��cС�ͻ���һ�C���ܵķ���lչ�����x���Ĺ��ܿɷ֞�Μy���x��, �y���c�y����Y�ϵăx��, �y�ࡢ�y���cӋ�����Y�σx��(����ٜy�x)���߾��ȵĶ̳̜y���x�@��� �Μy��ăx�������Ï��ƚw�Ļ������c�����x����ʹ��, ������߅�ǜy���͌����y���Č�ʩ, �@x��Ҳ�ɲ��ü����Դ���ǡ���Y�ϵăx���ж��N: һ�N�ǜy��ϵ�y���齛���x�ĸ���, �eľʽ�b�ڽ����x��, ���ԄӜy���c�����x�y����Y��ֱ�Ӟ�ˮƽ���x���������˲�Dx��Dy��Ӌ��. ��DI-3��DI-3S; ��һ�N�܌��ԄӜy���c��W�y��
�x���y��һ���OӋ�����w�̓x��, ���늜y�ཛ���x,��SM11[2]��
�� ���y�ǡ��y�ࡢӋ�����Y�ϵăx��(��AG710)�����C�͔���̎�������������y�Dz��ֲ��þ��a�ȱP, �ǶȺ;��xһ�Ӷ����ԄӔ����@ʾ���ԄӚw��Ĺ��ܰ����Ԅ�Ӌ��ˮƽ���x���߲�, �Ԅ��M�К��������Լ��Ԅ���������ڜyվ�Ĵ����c�O����, �����Ԅ�ӛ��ڿ����ϡ������@x���ַQ������ٜy�x���@x���đ����c�ռ�, ��ʹ���y�ij��Мy�����̿��y��С�^��ĵ��Μy�����g��֮�����^, ���ќy�ࡢ�y�ǡ��y�ߺ�Ӌ����һ�_�x���ϽY������, �Ķ��ڜyվ�σH�����֮�Ⱦ�ֱ�ӫ@�Üy���c������, �����ô��������Ԅ��L�Ƶ��ΈD������DѸ���ṩ�˴�����ԭʼ�Y�ϡ� �̳̜y���x�ľ�����Ҫ����ߜy�ྫ��, ����@x���Ĝy�̶��� ��1��2km֮��, �����h���x���f������`���Ӱ푲�����Ҫ���ء��̳̜y���x�ľ�����ҪӰ��ǹ̶��`��, ���̶��`�������ǜy���`��ռ��Ҫ��λ, ���, �p�ٜy���`��, �����Ƹ߾��ȶ̳���λ�y���x���P�I��Ȼ����һ���Ĝy�ྫ����, ����{���l����һ����֮��Ч�Ĵ�ʩ��
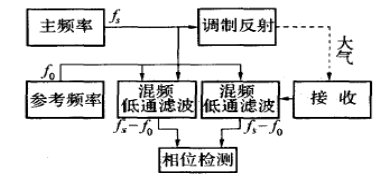
������ ����y���Wϵ�y 3��1 ����y���x��ϵ�y�Y��������Ӝy���xһ���ɼ����Դ�������{�Ƽ��l���·����Wϵ�y�����Ն�Ԫ�����l�Ŵ��·���ɘӷe���·��߉�·����ʎ�·��̎�������ֽM��,ϵ�y��D��D3.1��ʾ�������Դ���ð댧�w������O�ܡ����ְ��������Ԫ�ͱ����Ԫ,ͨ�^�l�ʺϳ��·�քe�a���l���l����̖�ͻ��ʻ��l��̖���l���l����̖���^һ���IJ���׃�Q���ʷŴ��,�����ڼ�����O��,�M�Ѓ��{��,�l���{�Ƽ�����̖[3]�� 
�D3.1 ����y���x��ϵ�y�Y�� Fig.3. 1 laser ranging equipment system structure ����y���Wϵ�y�OӋ�ķ�����ԭ��飺��Ŀ��ָʾ,Ŀ���ٶȷֱ���8km/ h �����ӳ���,���l��100��200 ��/ s�����_�y�� ����ÿ��1000 �ε����ʾ��Ų�ӛ䛷�λ�����ǡ����x�͕r�g�������M������׃�Q,�Ա�ݔ���߾��ȵČ��rλ�Ô���,�����L�D�͔����@ʾ��ʹ�ó���ָ����λ�ώׂ��^��,���CĿ�˻������P�I�^���ڰ�ȫ�˜ʷ����Ȱ�ȫ���ơ�
�����¡�����y���Wϵ�y 3��2��Wϵ�y�Dʾ
�D3.2 ����y��Ĺ�Wϵ�y Fig. 3.2 Laser ranging optical system �D3.2 �Ǽ���y��Ĺ�Wϵ�y[4]����ϵ�y���������l�䲿��:һ���B�m��( GaL1As) ����l��C;�����B�m��(CO2) ����l��C;������λ( GaA1As) ����l��C���D��:1 - �B�m��( GaA1As) ����l��C; 2 - ��λ( GaA1As) ����l��C;3 - �B�m��(CO2) ����l��C;4 ��5 - ���k��̽�y��;6 ��7 - ���{����;8 ��9 -ǰ�÷Ŵ���;10 - ��׃�p����;11 - ɢ����;12 ��30 -�y��ͨ��̽�y��;13 - ���ނ�����;14 - ���S늺������(CCD) ;15 - ������;16 - �{�ʂ�����; 17 - �l���V�@ʾ��;18 - ����ͨ��; 19 - ����ͨ��; 20 - ������;21 ��22 ��23 - �R; 24 - ���w��; 25 - �V��Ƭ;26 - ���R;27 ��33 - �����ƫ��; 28 ��32 - �ķ�֮һ��Ƭ;29 - �ǶȞV����;31 - ������;34 ��35 - ��λ����������;36 - �� λ��������;37 - ��ֱ�R����
3��3 ��Wϵ�y�OӋ��Ҫ���������c������λ( GaA1As) ����l��C�����������ڽ����V�ǽث@��ۙĿ��, ���M��Ŀ�˵Ĵ֜y; �B�m��(GaA1As) ����l��ϵ�y���ھ��_�Ĝy��; �B�m��(CO2) ����l��ϵ�y���ڜy���ٶȡ��{�����R�ЃɌ�,�քe����GaA1As ��������CO2 ��������ƫ�D����,Ŀ�˽ث@����ۙ̽�y�����ö��S��늺��������CCD�� 늺���������Ă��й������ڹ�����Ϣ늺ɵĴ惦�͂�ݔ�ɂ��^����ɵġ�����ѱ��yĿ�˵Ĺ�W�D��ۼ���늺���������D��������Ĺ���^��,�t���ς��c���a���Ĺ����d���ӵĔ���,���c�����c�ϵĈD����������������һ��Q���e�֕r�g�ĕr�g�g���,�@Щ�ٔ������d���ӷքe���ռ����惦�ھͽ��Ą�����,�γ�һ��������Ϣ늺ɰ�,ÿһ����Ϣ늺ɰ����������Ϣ늺��c늺����������������������λ�õĹ⏊������,����ɞ鱻�y��W�D����T�cȡ��ģ�M���@��,�Ͱѹ�W�D���D׃�ɞ�����Ϣ늺������L����ӈD��,����˹���D�Q�c������Ϣ���^�̡����˰��������ȡ����늺ɰ�����Ϣ늺�,ʹ�����յĈD�������̖����ʽ�٬F����,���ڸ���늘O������ʩ����Ҏ�t׃���ĕr��}�_늉�,����늘O�µĄ������Ҳ����������׃��,�Ķ�ʹ늺ɰ��܉��ذ댧�w�����������\�ӡ� ���S늺���������ĸй��Ԫ�ʶ��S�������,�M�ɸй�^�����ڂ�ݔ���x���Y����ʽ��ͬ,��ꇈD�������ж�N��ʽ�����k��������Ŀǰ�������������ǰ;�Ĺ�늌�̽�y�������Ĺ��V푑���8��4��m ֮�g,���ⴰ�ڲ���,���ֵ���L��1016��m �cCO2 �������ļ��Ⲩ�L��ƥ��,푑��r�g�s��10 - 4ms ���������Դ˹�������ڼ���y���Լ����x׃���ʜy���x��,��������̽�y���� ����y���Wϵ�y�е��հl���h�R�M����һ�̽����R����˹�����۽�,�Ա�@�ØOС������,Ȼ������һ���L�����R���F��ֱ�����䷽���ԡ����ނ���������ֻ���ચ���Ĺ��늶��O�ܽM�ɡ�������Ԫ����������푑��ȸߵ�ǰ������߸����������ľ�����,���pС��������֮�g�Ĵ��_[5]��
�����¡�����y���Wϵ�y 3��4 ��Ҫ�������ܔ������þ��x0��30 ,000m �ǶȜy���ʴ_��< ��110�� �ֱ���x0.115m �Ƕȸ��w����180�� ������ٶ�2��/ ms �Ƕ�ƫ�D����0��20�� �B�m��( GaA1As) ���������L��0185��m �B�m��CO2 ���������L��1016��m ��λ( GaA1As) ���������L��01905��m ��ֵ���ʡ�����15W ݔ�����ʡ�����15mW �؏��l�ʡ�����90pps (ÿ��犵����ڔ�) ����̽�y������ѩ����늶��O�� �����R����18��100mm ���ĵ���λ�y�����֙z�yϵ�y�Ǹ�������y��Ĺ���ԭ�����ɼ���y��ԭ���^���lչ����λʽ����y���ԭ�����������ڼ����I�����������P�Ĺ�Wϵ�y���OӋ�ġ�
������ �������P�z�y���g���M�����OӋ ��λ������y�������ðl����{�ƹ��c���yĿ�˷���Ľ��չ�֮�g�⏊����λ�������ľ��x��Ϣ�팍�F�����yĿ�˾��x�Ĝy�������ڲ����{�ƺͲ��l�y�༼�g, ���Мy�����ȸߵă��c, �V�������к���Ŀ�˵ľ��ܜy�����ϡ�������λʽ�y���x������y�����ȸ߶����V���ؑ�����܊�¡��ƌW���g�����a���O���I����λʽ�y���x�Ļ���ԭ����ͨ�^�y���B�m�{����̖�ڴ��y���x�������������a ������λ���t,���g�ӵy����̖�����r�g,�Ķ���ñ��y���x. ���,��̖��λ�y���ľ���Ҳ�͛Q���˼���y���x�ľ���[6]�� �y���x���P�z�y���g����̖�z�y�I����һ�N��Ҫ����,�����ڵ�����ȵ���r����ȡ�����õ���̖,�����^���Ŀ���������,��ͬ�l������V����һ��,�r��������P����������̖�������I���ﶼ�Б���,����D��̎�����l���b�С����_����̽�y���t�W��ͨ�Ź��̵ȡ� �ڴ˱����OӋһ�N���͵ļ�����λʽ�y���x,�����F��������̖̎�����g�����ڜy��ϵ�y,���Ô�����̖̎��оƬ�ď���Ĕ����\�㹦��,���ɼ�����̖�M�Д������P�\��,Ӌ����y����̖�c������̖����λ��,�^���õ����xֵ�� 4��1 ������λʽ�y��Ļ���ԭ�����y����λ������y���C,������ߜy������,ͨ����Ҫ�Ѽ����{���l����ߵ���ʮ�������װ��ף�������������,ͨ���Ѽ����{���l�ʽ��͵�������������;������ߜy����λ�ľ���,ͨ���Ѱl����̖�ͻز���̖�c������l�M��������b���y�ࡣ��Ҫͬ�r���F�߾��Ⱥʹ�����,�t��Ҫ��M�����{���l��,���S���y�����ȵ����,�{���l�ʕ���������,�@Щ���·����Ҫ���Խ��Խ��,�·�ď��s��Ҳ���S֮����,������̖֮�g�Ĵ��_���S֮����,�@�o�߾��ȼ���y���C���OӋ�����쎧���ܴ�����y�����˿˷��@Щ���y,���������һ�N��ֱ�Ӕ��ֺϳ�(DDS)���g�c������̖̎����(DSP)��Y�ϵļ���y���,����DSP����Č��r��̖̎�������c��DDS ��������һ�������Ȯa�������l�ʵ����c,ֻ����{���l��������10��Ɲ�ԃȾͿ����_���ܸߵĜy�����Ⱥͺܴ������,�����ڹ������ṩ��һ������Փ�OӋ[6]�����ľ������ԭ��, ϵ�y��D���`�����
�����¡��������P�z�y���g���M�����OӋ ��Ԕ����Փ���� �����ٶ�c �ڴ���Ђ�������A��B ���c�g����һ������r�g�c���x���Pϵ�ɱ�ʾ�飺L= ct/2�� ��ʽ��L���� ���y���cA��B �g��ֱ�����x��c ���� ���ڴ���Ђ������ٶȣ�t ���� ������AB һ������r�g������ʽ��֪�����x�y�����|�nj�����AB �g�����r�g�Ĝy�������ڌ��r�g�y�����_�����Ԍ����r�g�Ĝy���D���錦��λ��Ĝy������λ��Ĝy�������_���ܸߵľ��ȣ��ʶ����x�Ĝy��Ҳ���_���˺ܸߵľ���[7]�� ����y�����ßo��늲��ε��l��,���������M�з����{�Ʋ��y���{�ƹ�����һ�����a������λ���t,�ٸ����{�ƹ�IJ��L�Q�����λ���t�������ľ��x�������g�ӷ����y�����⽛�����y������ĕr�g,��D4.1��ʾ�� 
�D4.1���y����λʾ��D Fig.4.1 range finder phase schematic drawing ��λʽ����y��һ�㑪���ھ��ܜy���С������侫�ȸ�,һ������,������Ч�ط�����̖,��ʹ�y����Ŀ���������c�x��������Q��ijһ�ض��c��,���@�N�y���x��������˱��Q�����Ŀ�˵ķ����R�� �D4.2����͵�ģ�M�y���·��ԭ��D[8]�� �D4.2 ��ģ�M�y���·ԭ��D Fig. 4.2 the simulation measures the electric circuit schematic diagram ��ӑՓ����,�@�������¼��O�� 1) �O���l����̖�ͅ����l����̖�ij�ʼ��λ��0�㡣 2) �y���ľ��xС��c2/ fs(һ��Q����) ���@��c ����٣��s����300000000m/s , fs ���{���l�ʡ� 3) ���O�ɔ_����0�� �O���l����̖S1 = A cos ( wst ) , �����l����̖S2 = Bcos ( w��t ) , ��fs > f0 , ��ô���յ���̖��ԓ��R = Ccos ( ws +��) ��ʽ��:�ձ�ʾ��λ׃��,��ô���^���l���͵�ͨ�V��������̖�քe�飺 E1 = Dcos[ ( ws - w��)t ] , E2 = Ecos[ ( ws - w��)t +��]�� ����əz���·��z�y��λ���, ���ɵõ��r�g��t =��/2��fs�����xL =c��/2��fs�� һ����λ�z�y���Dz���ƽ��y��͔��֜y�෨�����@2 �N�����������·���s���w�e��ʹ�ò����ȱ�c���������侫�Ȳ��ߣ���ijЩ�����Dz��ܝM��Ҫ��ġ�������ߜy��ľ��Ⱥ͜p���w�e���@�����ìF��������̖̎��(DSP)���g��ֱ�Ӕ����l�ʺϳɣ�DDS�����g�������M���˸��M,�������OӋ֮ǰ,Ҫ�Ȍ�������̖̎��(DSP)���g��ֱ�Ӕ����l�ʺϳɣ�DDS�����g�M�г����˽���J�R�� 4��2 ������̖̎��(DSP)�ĺ���������̖̎��(DSP)�����Ì��û�ͨ�õĔ�����̖̎��оƬ���Ԕ���Ӌ��ķ�������̖�M��̎��������̎���ٶȿ졢�`����_�����ɔ_���������w�eС�ȃ��c��DSP��
�����¡��������P�z�y���g���M�����OӋ ���ɞ�һ���µļ��g�I��ͪ����ČW���wϵ����ǰ�ѽ��γ����Н����Įa�I���Ј����ڬF�����ͨ����Ҳ�õ�ʮ�֏V���ͳɹ��đ��á� �V�x���f��������̖̎�����о��Ô��ַ�������̖�M�з�����׃�Q���V�����z�y���{�ơ����{�Լ������㷨��һ�T���g�W�ơ����ܶ����J�飺������̖̎����Ҫ���о����P���֞V�����g���xɢ׃�Q�����㷨���V�����������S�������·�cϵ�y���g�Լ�Ӌ��C���g�İlչ��������̖̎�����gҲ�����صõ��lչ���䑪���I��ʮ�֏V�������֞V���� ���֞V�����Č�����ʽ�ܶ࣬���Կɷ֞����ޛ_��푑��ͺ͟o�ޛ_��푑��̓������Ӳ����ܛ���ɷN��ʽ���F����Ӳ�����F��ʽ�У����ɼӷ������˷����Ȇ�Ԫ���M�ɣ��@�c�������늸���������������ɵ�ģ�M�V������ȫ��ͬ[9]�� 4.2.1 ������̖̎������Ҫ�о�����������̖̎����Ҫ�о��Ô������л��̖���б�ʾ��̖�����Ô���Ӌ�㷽�����@Щ�����M��̎�����Ա����̖׃�Q�ɷ���ij�N��Ҫ����ʽ��������̖̎������Ҫ���ݰ����l�V���������֞V���c��̖���R�e�ȡ� ������̖̎���г��õ��\���в�ַ���Ӌ�㡢���Pϵ��Ӌ�㡢�xɢ�����~׃�QӋ�㡢�����V�ܶ�Ӌ�㡢����\�㡢������ָ���\�㡢���l��׃�Q��ģ���͔�ֵ�D�Q�ȡ��ܶ�������̖̎�톖�}�����������@Щ�㷨�������������\�㣬���^�m���ĽM�ρ팍�F[10]�� 4.2.2 �yԇ��̖���ֻ�̎���Ļ������E�S����Ӽ��g����̖̎�����g�İlչ���ڹ��̜yԇ�У�������̖̎�������õ��V���đ��ã��ѳɞ�yԇϵ�y�е���Ҫ���֡��Ă������@ȡ�Ĝyԇ��̖�д������ģ�M��̖���M�Д�����̖̎��֮ǰ��һ����Ҫ����̖���A̎���͔��ֻ�̎����������ʽ�������t��ֱ��ͨ�^�ӿ��cӋ��C�B�ӣ���������̖�ͽoӋ��C��������̖̎�������M��̎��[11]�� (1) �A̎����ָ�ڔ���̎��֮ǰ������̖��ģ�M�����M�е�̎��������̖׃���m�ڔ���̎������ʽ���ԜpС����̎�������y���猦ݔ����̖�ķ�ֵ�M��̎����ʹ��̖��ֵ�cA��D�D�Q���ĄӑB�������m����˥�p��̖�в����dȤ�ĸ��l�ɷ֣��pС�l���Ӱ푣�
���x��������̖�е�ֱ������������څ��헼�ֱ�������ĸɔ_���̎������ (2) A��D�D�Q�nj��A̎���Ժ��ģ�M��̖׃�锵����̖�����뵽ָ���ĵط����������A/V�D�Q������̖̎��ϵ�y������ָ���c���������Pϵ�� (3) ���ɼ����Ĕ�����̖�M�з�����Ӌ�㣬���Ô����\�������M����̖̎������ɣ�Ҳ����ͨ��Ӌ��C��Ŀǰ����Ӌ���ٶȺܿ죬�ѽ����_�������r���� (4) �Y���@ʾһ����Ô����͈D���@ʾ�Y���� 4.2.3 ����̎����̖�ă���������̖̎���V�������ڬF�����ͨ���У������DSP�cģ�M��̖̎����ȣ����������c[12]�� (1) ��̖̎���ĄӑB�������б�ģ�M�Ŵ�30dB�ĄӑB����������и��ߵľ��ȡ�
(2)������̖̎��H�������`����������L��Ӱ푣�̎���^�̲��a�������������и��ߵ�����ȡ�
(3)���и߶ȵ��`���ԣ��܉����̎����������ؽM�����ԕr�ֶ��á�����̎����߀�����`��ظ�׃ϵ�y����������ʽ����������ϵ�y���档
(4)���ИO�õ��جF�ԡ��ɿ��Ժ��AҊ�ԡ�
(5) �㷨����ֱ�ӵĿɌ��F�ԡ�
(6)����������ƽ��ɔ_�Ͷ����ɔ_����������������ѻ��Č��F����ȥ�M�����е���̖̎���� ���σ��c��DSP(������̖̎��)�ڬF����늵�ͨ���Б��õ���Ҫ���C�� 4��3 ֱ�Ӕ����l�ʺϳɼ��gֱ�Ӕ����l�ʺϳɼ��g(Direct Digital Frequency Synthesis��DDS)���Ǐ���λ������lֱ�Ӻϳ����貨�ε�һ�N�µ��l�ʺϳɼ��g���͂��y���l�ʺϳɼ��g��ȣ��������l�ʷֱ��ʸߡ��l���D׃�ٶȿ졢ݔ����λ�B�m����λ���͡��ɾ��̺�ȫ���ֻ������ڼ��ɵ�ͻ�����c��DDS�����M�Ĕ���̎�����g�c����������̖�ϳ��I�ɞ�F���l��
�����¡��������P�z�y���g���M�����OӋ �ϳɼ��g�е�ٮٮ�ߣ��õ���Խ��Խ�V���đ��ã��ɞ鱊�����ϵ�y�в���ȱ�ٵĽM�ɲ��֡� 4.3.1 DDS�Ļ�������ԭ���� DDS����ԭ����D��D4.3��ʾ���䌍�|���ԅ����l��Դ��ϵ�y�r犣�����λ�M�еȿɿ��g���IJɘ�[13]�� 
�D4.3 DDS��������ԭ��D Fig. 4.3 DDS works the basic schematic diagram �ɈD4.3��ҊDDS��������λ�ۼ�����ROM��ԃ�혋�ɵĔ�����ʎԴ��NCO����DAC�Լ���ͨ�V������LPF��3���֡� ��ÿһ���r����ڣ�Nλ��λ�ۼ����c�䷴��ֵ�M���ۼӣ���Y���ĸ�Mλ����ROM��ԃ���ĵ�ַ��Ȼ���ROM���x�������ķ���ֵ�͵�DAC����ͨ�V����LPF���ڞV��DACݔ���еĸߴ��C�������ͨ�^��׃�l�ʿ�����K�Ϳ��Ը�׃ݔ���l��fout�����õ�ݔ���l��fout�c�l�ʿ�����K���Pϵ�飺fout=Kfc/2N������fc����λ�ۼ����ĕr��l�ʣ�N����λ�ۼ�����λ���� ��FTW=1�r��DDS���ܮa����������̖������l�ʣ����l�ʷֱ��ʞ飺��f=fomin=fc/2N�� 4��4 ���M�Ĕ��֜y��Ŀ�D�OӋ����ģ�M�y���·�����·���s���w�e���Ȳ��ߡ�ʹ�ò����ȱ�c���Y�ϬF��������̖̎��(DSP)���g��ֱ�Ӕ����l�ʺϳɣ�DDS�����g�ľ�lչ���ݣ����Č�ԭ�еĜy���·�D�M���˸��M����ԭ����D��D4.4��ʾ��

�D4.4 �����M�Ĕ��֜y���D Fig.4. 4 The improvement numeral measures the diagram ���M�Ĝy��ϵ�y�cԭ�y��ϵ�y�����Ҫ�����
^�e�� 1) ���l����̖�c�����l����̖����ֱ�Ӕ����l�ʺϳ���(���QDDS) �a�����@�N�������Hݔ���l�ʵķֱ��ʸߣ����ҿ���ͨ�^���̸�׃ݔ���l�ʣ�������׃���,��ߜy��ľ��ȡ� 2) ���^���l����ͨ�V�������2 ·��̖�M��ģ���D�Q�·(ADC) ����DSP ������ͬһ�r�̆���2 ·ADC �M�Д����ɼ�,����DSP���Ô������P�z�y�ķ����y����λ��,�õ����xֵ�� ����DSP ���Џ���Č��r̎�����c��DDS �����Č�������,�Ɍ�DSP ��DDS �Y�������OӋ��һ�N�µļ���y���������DSP ��DDS �����a��һ�����������ȵ������l��f ,���@�����l����,��һ���Ē��l����,�ҵ������ăɂ�ʹ��λ������y��Ļ�����ʽ:L =mc/2f+����/2��c2fʽ�Ц��� = 0���l��fs1����fs2��Ӌ��L[14] ����ϵ�y�Y����D��D4.5��ʾ�� 
�D4.5������DDS ��DSP �ļ���y���C�Y���D Fig. 4.5 Based on DDS and DSP laser range finder structure drawing
�����¡��������P�z�y���g���M�����OӋ �ODDS ������������: �ܮa��������l��fmax ,��С�l��fmin ,DDS �IJ��M(�ܿ��Ƶ������ɂ��l�ʲ�) �馤f ,��DDS ݔ�����{�l���g���馤f �� �������ϵ�ԭ��,���y���C�Ĝy���^�̞�:ͨ�^DSP �O��DDS ��ʼݔ���l�ʞ����,�O��10MHz ,�Ѱl����̖�ͻز���̖���^��ͨ�V���Ŵ�����AD ,���r�ɘӃ�·��̖S1 ��S2 ����DSP �M���ЛQ̎��,�����·��̖�ı�ֵ���鶨ֵ, �����ղ�����,�t�{��DSP ��DDS�Ŀ�����ֵ̖,ʹDDS �����M��f �pС�l��f ,��ÿһ���l���c��,DSP ͨ�^AD �Č��r�ɘ���̖�Д��Ƿ�ɂ���Č��r���ȱȞ鶨ֵ,�������Ƿ����,�����鶨ֵ�t�^�mͨ�^DSP �{��DDS ���l��,ֱ���pСf ��ʹ�����ڜy�����x2 L�Ϟ����ֹ,�˕r2 L ���Þ������L,����D���p·AD �ă�·ݔ����̖��������ͬ�r�̲ɘ��c�ϵı�ֵ��һ��ֵ,DSP ͨ�^��̖̎���Д�˕r���՞��㲢ӛ����@���l��ֵfs1��,�˕r�������L����m1��,ͬ��,��fs1���Ļ��A�������{���l��, ʹ���F��һ��(������) ���՞����ֹ, �˕r�l�ʞ�fs2��, �˕r�������L����m2��,ӛ��fs2��,�����C��,����������ij��F�����L,�˕r��m1��= m2��+ 1 ����L ��0 ��+ �ޕr,��fmin < f < fmax �Е����F���N��r(����c �����) ,��ͬ����rӋ�㷽�̲�ͬ[15]�� �ٲ����ڦ��� = 0 , L <c/2fmax,�˕r��λ������y��Ļ�����ʽ�� L =mc/2f+����/2��c2f ��1��׃�飺 L =����/2��c2f (2) �@�N��r��һ��ȡf ��̶�ֵf max = 10MHz�t(2) ʽ׃�飺 L =����/2��c2fmax (3) ���Ц��յĜy���û���FFT �Ĕ�����λӋ��Ӌ��,�Ķ����L ��ֵ�� ��ֻ���Fһ�Φ��� = 0 ,c/2f max< L <c/fmax,�˕rm = 1 ,���� = 0 ,ӛ䛵��l�ʞ�fs1��, (1) ʽ׃��: L=c/2fs1�� (4) �۳��F�ɴλ�ɴ����Ϧ��� = 0 , �˕r, L > c/fmax �t��(1) ʽ�� L =m1��c/2fs1�� (5) L =m2��c2/fs2�� (6) �ҡ� ��m1��= m2��+ 1 (7) �t���� L =c/2( fs1��- fs2��) (8) �����@���y���^��,��DSP �Ȳ�ܛ���Ļ������̞�D4.6 ��ʾ�� 
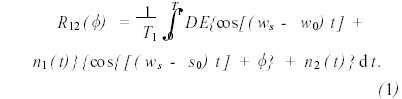
�D4.6 ��DSP �Ȳ���ܛ�����̈D Fig. 4.6 DSP interior software flow chart 4��5 �������P�z�y��ԭ�����ڱ�ϵ�y�еČ��F�����P�������������2����̖�ij˷e�ĕr�gƽ��,�@��һ�������õĽyӋ��,һ�����������Á��˽�2��δ֪��̖֮�g�����Ƴ̶�,����2����֪��̖�ĕr�g�Pϵ����һ�������к��Ŀ����������@���������̖�����Pϵ��������,������̖�н���ʹ�����P�z�y�ķ�����ȡ���õ���̖[16]����̖x ( t) ��y ( t) �Ļ����P�����ć����x���£� ʽ��: T ��ƽ���r�g,���x ( t) ��y ( t) �����ڞ�T0 ��������̖,�tֻ��Ҫ������1 �������������PӋ�㼴��,��
�����¡��������P�z�y���g���M�����OӋ �������еĻ����P�Ĺ�ʽ���£�rxy (��) =1/N ��x ( n) y ( n +��)��ʽ��: N �����P��̖��ӛ��L��(�ɘӵ��c��) , 2����̖�ĕr����,��= 0 , 1 , ., N - 1 , ͨ��ֱ�ӷQ��r��, T ��ɘӕr�g�g���� �ڱ�ϵ�y�О��˷�������, ����ģ�M���з���,������ķ�����֪���^���l���͵�ͨ�V����ݔ������̖�քe��[17]�� E1 = Dcos[ ( ws - w0) t ] + n1 ( t) �� E2 = Ecos[ ( ws - w0) t + ��] + n2 ( t) �� ʽ��: n1 ( t) ��n2 ( t ) �քe���S�C���ɔ_�. �ɻ����P�Ķ��x��֪,��̖E1 �cE2 �Ļ����P�������Ǧյĺ���,����_ʽ����: ʽ��: T1 ����l��̖������,�����S�C�������P���^��,��ʽ(1) �ɵã� R12 (��) = DEcos��/2�� (2) ��ʽ(2) ��֪, Ҫ��õ���λ���, ���Ҫ֪��D ��E ��ֵ, D ��E ��ֵ�����ĸɔ_�ȴ�,�������P�\��Ҫ���wһ��̎��.�����^ģ���D�Q�·��2 ·��̖�քe��ʾ�飺 E1 ( n) = Dcos[ ( ws - w0) n T ] + n1 ( n T) �� E2 ( n) = Ecos[ ( ws - w0) n T + ��] + n2 ( n T) �� �ڔ�����ȵ����P�����飺 r12 (��) =1/N ��E1 ( n) E2 ( n) ����̖E1 ( n) ��E2 ( n) �ľ�����ֵ�飺 ����ݔ����̖���ȷdz�С����tFFT�\��Y�����܌�����������ֹ����İl����FFT�\���ṩ�˚wһ�����ܣ����x������ݔ���Y�����\���L��N��������FFT �\���M�Кwһ�����M��FFT���\��Ͳ���Ҫ�wһ���ˡ� ������̖�Ěwһ���ĽY���飺 ���õ���= arccos (��) ,���x L =c��/2��f ���о�����,��Ҫ�ڌ��H�đ��î��У����둪��ע�������c: (1)�M�л����P�\��IJɘ��c�����Dz��l��̖һ�����ڲɘӔ����������� (2) �����ϵ�Ӌ����Կ���,���M��ģ���D�Q�·֮ǰ,һ��Ҫ�ܺõ؞V���� (3) ���·���F��,һ��Ҫ����2��ADC��2 ��DDS ͬ�r���ӡ� ������ С�Y �������OӋ�ļ�����λ�y���x���ڳ�������ˬF��������̖̎�����g,���Ҍ�DDS ��DSP ���g�Y���OӋ�ļ���y�������ɔ������P�z�y�㷨�Ļ��A�ό��F�ģ�ԓ������������ߜy���x�ľ��Ⱥͷ�����,���ұ��OӋ�ںܴ�̶��Ϻ������·�ď��s��,�Ǟ鼤��y���x���ȵ�����ṩ��һ�N��Փ�ϵ��OӋ�� ���ڼ��⪚�ص����|,ʹ����y���x���������y���x���o���ȔM�ă��ݡ��������ˣ��������·�����S����Ӽ��g�İlչ,څ���ڼ��ɻ������ֻ�,ʹ��ϵ�y�ڿɿ��Է�������ߡ�
������Word��ʽ�ęn51�����d��ַ��
 ��λ������y�����Փ�OӋ(�C�����°�).doc
(336.5 KB, ���d��: 20)
��λ������y�����Փ�OӋ(�C�����°�).doc
(336.5 KB, ���d��: 20)
2018-12-4 18:36 �ς�
�c���ļ������d����
��λ�y�� ���d�e��: �ڎ� -5
| 




 ����TQQ:125739409;���g����QQȺ281945664
����TQQ:125739409;���g����QQȺ281945664






 QQ���Ѻ�Ⱥ
QQ���Ѻ�Ⱥ QQ���g
QQ���g �vӍ��
�vӍ�� �vӍ����
�vӍ���� �ղ�
�ղ� ����
���� �
� ��
��