|
2 �n�}���OӋҪ����OӋ���� 2.1 �OӋҪ�� 2.1.1�}Ŀ���� ��·��ͨ��̖���ǵ�·��ͨ��ȫ�Įa(ch��n)Ʒ�������Լӏ���·��ͨ�������p�ٽ�ͨ�¹ʵİl(f��)������ߵ�·ʹ��Ч�ʣ����ƽ�ͨ��r��һ�N��Ҫ���ߡ����m���ڸ��Nʮ�֡����ֵȽ���·�ڣ��ɵ�·��ͨ��̖�����ƣ�ָ��܇�v�����˰�ȫ�������ͨ�С� 2.1.2 �OӋ�΄� �OӋһ�N��ͨ��̖���Ŀ���ϵ�y(t��ng)��Ҫ��ֱ�^�����Ρ��܉�M��ʮ��·�ڽ�ͨ�ȵ�ʹ������ 2.1.3 �OӋҪ�� 1. ��ͨ·�ڞ�ʮ��·�ڡ� 2���R·���p����܇������Ҫ�����D(zhu��n)����ֱ�П������D(zhu��n)���� 3��Ҫ���]���ЙM������̖���� 4�����@ʾ�O������@ʾͨ�ŕr�g�� 5��Ҫ��ͨ�Еr�g���{(di��o)��
2.2 �OӋ���� 2.2.1 ��늷��� ϵ�y(t��ng)Ҫ����������(w��n)���Ġ�B(t��i)�¹��������Ҫ�пɿ����Դ�������λ��چ�Ƭ�C���OӋ��Ҫ�@ʾ��оƬ�^�࣬�Դ����������˱����OӋ���������N������ ����һ�����ê����ķ�(w��n)���Դ��늡���(y��u)�c�ǿ��ṩ��(w��n)�����ɿ��Դ�����ҿ�������220V늉��D(zhu��n)�������ܸ��N���ص����ƣ�ȱ�c�Ǹ�ģ�K�����ê����Դ�������ӱ����OӋ���y�ȣ����Ҍ������·߀�����һ���ĸɔ_�� ������������USB�D(zhu��n)�ӿ�5V늉���늣��@�Ӻ������ˣ����džΆ�һ��5V�Դ��늿��ܕ��@���Դ���㣬���o���M�㌍�H����Ҫ�� ������������USB�D(zhu��n)�ӿ�5V�p�Դ늉���늣��@�Ӱѱ����OӋ�֞�ɴ�ģ�K��һ�ǽ�ͨ��̖������ϵ�y(t��ng)�������f��vϵ�y(t��ng)�������p�Դ��늣�һ���齻ͨ��̖������ϵ�y(t��ng)�ṩ�Դ����һ�����f��vϵ�y(t��ng)�ṩ�Դ���@�Ӽ����ζ��ֿ��ṩ��(w��n)�����Դ�� ���]�����H��r���·�ĺ��������OӋ�����˵����������˷������·���OӋ�Ͽ���ϵ�y(t��ng)�֞�ɴ�ģ�K��ʹϵ�y(t��ng)�OӋ���λ����Ķ��ֿ����ṩ��(w��n)�����ɿ��Դ�������چ��Դ��늵���r�²�Ӱ���һģ�K�Ĺ�����
2.2.2 ݔ�뷽�� ԓϵ�y(t��ng)Ҫ�����քӼ����ܿ��Ƹ�׃��ͨ��̖����ͨ�Еr�g���f��v�r�g���{(di��o)���� ����һ������8155�UչI/O �ڼ��I�P���@ʾ�ȡ�ԓ�����ă�(y��u)�c�ǣ�ʹ���`��ɾ��̣�������RAM,��Ӌ��(sh��)��������ԓ���������ṩ�^��I/O ��,�������������@���s�� �������� ֱ����I/O�ھ��Ͻ��ϰ��I�_�P(gu��n)��ԓ������(y��u)�c�ǣ����̸��Ӻ�����ʹ�ø��Ӻ��Σ��ҳɱ����͡�ȱ�c���ǹ������ޡ� �C�Ͽ��]���OӋ�Č��H��Ҫ����ʹ��ݔ��ĕr����Ҫ�^�ڏ��s�Ĺ��ܣ����ֱ����I/O�ھ��Ͻ��ϰ��I�_�P(gu��n)���ԝM�㱾��ϵ�y(t��ng)�OӋ����Ҫ���ʲ��÷�������
2.2.3 �@ʾ���淽�� ���OӋ�漰����Ӌ�r����B(t��i)�����r�g���ضȵ��@ʾ���ܡ����ڹ��������OӋ���]�����ķN������ ����һ����ȫ���Ô�(sh��)�a���@ʾ���@�N����ֻ�@ʾ���ķ�̖�͔�(sh��)�a�ַ����o�����ι������� ����������ȫ�����c�ʽLED �@ʾ���@�N�������F(xi��n)���s�������ɴ�����ܛ���������������ɷ�����@ʾ���NӢ���ַ����h�֣��D�εȡ� ������������LCD1602Һ���@ʾ���@�N�@ʾ���^���^�����ǹ����������OӋ���s���ټ�����Ҫ����LCD1602�^�࣬�Ľ�(j��ng)����Ҳ�����㡣 �����ģ����Ô�(sh��)�a�ܡ�LED�cLCD1602��Y(ji��)�ϵķ�������OӋ��Ҫ��Ӌ�r��(sh��)��ݔ������Ҫ���Р�B(t��i)��ݔ����ͬ�r߀Ҫ�@ʾ���ꡢ�¡��ա��r���֡��롢���ں͜ضȡ����˷����^�������]�����H��r���Ô�(sh��)�a���@ʾ��ͨ��̖���ĵ�Ӌ�r����LED�@ʾ��ͨ���Ġ�B(t��i)������LCD1602�@ʾ�ꡢ�¡��ա��r���֡��롢���ں͜ضȡ��@�N�OӋ�����ȝM��ϵ�y(t��ng)����Ҫ���֜p����ϵ�y(t��ng)���F(xi��n)�ď��s�ȡ�
2.2.4��ͨ������ 2.2.4.1��ͨ��Ҏ(gu��)�t���� ���OӋ�Ľ�ͨ����ʮ��·�ڞ�ģ�ͣ��ڌ��F(xi��n)�����Ĺ���ǰ���������˕r�g���ضȵ�Һ���@ʾ���Ķ�߀������·�ڸ߷��ڵ����ܻ��˹�����C�ơ� ���H�����н�ͨ��̖����Ҏ(gu��)�tǧ׃?n��i)f�����ڲ�ͬ��·���Ͽ����Ľ�ͨ��̖����Ҏ(gu��)�t��һ�ӣ����ǿ��w߀������Ҳ��һЩ����(j��)���H����Ҫ���O�ò�ͬ�Ľ�ͨҎ(gu��)�t������ϵ�y(t��ng)��ͨҎ(gu��)�t���O���Ǹ���(j��)�F(xi��n)�������еĽ�ͨҎ(gu��)�t�Ͷ�ӿ��]���N�F(xi��n)�����ؽY(ji��)���������ƶ������½�ͨҎ(gu��)�t�� �D��ʾ��һ�N�t�G��Ҏ(gu��)�t�Ġ�B(t��i)�D��
 
 
 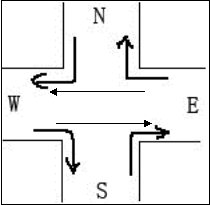
 
���ķN��B(t��i)���քe�O����S1��S2��S3��S4����ͨ�����@�ķN��B(t��i)��һ�����ڣ�ѭ�h(hu��n)��(zh��)�����D��ʾ�� 
 ����(j��)����܇�v���Ġ�B(t��i)�D�������г�����ģʽ�¸���·�ڽ�ͨ��̖����߉�����±���ʾ(����߉ֵ��1����ʾֱ��ͨ�У�߉ֵ��0����ʾ��ֹͨ�У�߉ֵ��L����ʾ���D(zhu��n)ͨ��)��
��2.1 ����ģʽ�¹�����
��������������ķN��B(t��i)��ѭ�h(hu��n)�D(zhu��n)���ģ���ÿ�N��B(t��i)���ְ����G��ͨ�к��S���W�q�����B(t��i)��ϵ�y(t��ng)������ģʽ��ѭ�h(hu��n)һ����������Ҫ�ĕr�g��120S,��(sh��)�a���@ʾ�Ĺ���ģʽ�������60.
2.2.4.2���Nģʽ��ͨ�Еr�g ��ϵ�y(t��ng)�Y(ji��)�ό��H����Ҫ�����������ķN��B(t��i)��ÿ�N��B(t��i)���ټ��֞�G��ͨ�С��S���W�q�ɷN��B(t��i)�������˷N������B(t��i)��ϵ�y(t��ng)����������ģʽ���ֿɷ֞����N����ģʽ���քe�飺����ģʽ����æģʽ������ģʽ�����Nģʽ�µĕr�g�������±�2.2�� ��2.2 ��ģʽ�r�g�����
2.2.5 �f��v�OӋ���� �·�OӋ��D ��ϵ�y(t��ng)���·ϵ�y(t��ng)��D��D2.6��ʾ��AT89C51��Ƭ�C��DS1302��DS18B20��������ֲ��xȡ�����Ĕ�(sh��)��(j��)���^������LCD1602�����������@ʾ��ͬ�rҲ��ͨ��̖���ⲿ�l(f��)�����r�Д࣬�Ķ���׃��ͨ��̖���Ĺ���ģʽ��
�D2.6�y(t��ng)Ӳ����D
3 оƬ�Ľ�B������3.1 AT89C51��Ƭ�C��B������ ��Ƭ��Ӌ��C���Q��Ƭ�C��ͬ�r�ַQ����������Ƕ��ʽ�������ȣ������ڵ��Ĵ����Ӌ��C�����Ѹ��NоƬ�·������һ�KоƬ�ϣ�����������w�eС�����ɔ_�����������ĵ͡��ɿ��Ը��Լ������ăr�����V�������ڹ��I(y��)�^�̿��ơ��y��ϵ�y(t��ng)�����N���܃x���x���ȡ���ˇ��H����u����������(MCU)�����Ƭ��Ӌ��C(SCM)�@һ���Q�����������Ը��ʴ_�ķ�������Ƭ�C�ı��|(zh��)������Ƭ�C�@һ���Q�Ԟ�����(sh��)�������ܣ����Ԇ�Ƭ��Ӌ��C���dž�Ƭ�C��ͬ�r�ַQ����������
3.1.1��Ƭ�C�����_������ AT89C51��Ƭ�C�� ���_�D��D3.1 ��ʾ 
�D3.1 AT89C51��Ƭ�C���_�D
VCC���Դ늉� GND���� P0�ڣ�P0����һ��©�O�_·��8λ�p��I��0�ڣ�����(sh��)��(j��)����ַ�����ď��ÿڡ���������ݔ���˿�ʹ�Õr��ÿλ���(q��)��8��TTL߉�T�·�� P1�ڣ�Pl ����һ������(n��i)����������8λ�p��I��O�ڣ�Pl�ڵ�ݔ�����_�����(q��)��4��TTL߉�T�·�����҂����˿ڌ��롰1���r��ͨ�^��(n��i)�����������Ѷ˿��������ƽ���˕rP1�ڿ�����ݔ��˿ڡ���P1������ݔ��ڕr�����ڃ�(n��i)������������裬�����ⲿ���_���͕r��ݔ����(sh��)��(j��)��P1�ڳ������Ϲ����⣬����Ҫ�������ĵڶ��������3.1��ʾ��
��3.1 P1�����_�ĵڶ�����
P2�ڣ�P2��Ҳ��һ�����Ѓ�(n��i)����������8 λ�p��I��O �ڡ�P2 ��ݔ�����_��Ҳ���(q��)��4 ��TTL߉�T�·�����҂����˿ڌ��롰1���r��ͨ�^��(n��i)�����������Ѷ˿��������ƽ���˕rP2�ڿ�����ݔ��˿ڡ���P2������ݔ��ڕr�����ڃ�(n��i)������������裬�����ⲿ���_���͕r��ݔ����(sh��)��(j��)�����L���ⲿ����惦����16λ��ַ�ⲿ��(sh��)��(j��)�Ĵ惦���r��P2��ݔ����8λ��(sh��)��(j��)��ַ�����L��8 λ�ⲿ��(sh��)��(j��)�惦����ַ�r��P2�ڵă�(n��i)���������L���^�̌�������׃�� P3 �ڣ�P3 ��Ҳ��һ�����Ѓ�(n��i)����������8 λ�p��I��0 �ڡ�P3 ��ݔ�����_��Ҳ���(q��)��4 ��TTL߉�T�·�����҂����˿ڌ��롰1���r��ͨ�^��(n��i)�����������Ѷ˿��������ƽ���˕rP3�ڿ�����ݔ��˿ڡ���P3������ݔ��ڕr�����ڃ�(n��i)������������裬�����ⲿ���_���͕r��ݔ����(sh��)��(j��)��P3�ڳ���������;�⣬����Ҫ�������ĵڶ��������3.2��ʾ�� ��3.2 P3�����_�ĵڶ����� | | | | | | | | | | | T0�����r��Ӌ��(sh��)��0�ⲿݔ�룩 | | T1�����r��Ӌ��(sh��)��1�ⲿݔ�룩 | | / WR���ⲿ��(sh��)��(j��)�惦�����xͨ�� | | / RD(�ⲿ��(sh��)��(j��)�惦���x�xͨ�� |
P3��߀�����ڽ���һЩFlash�W�ٴ惦���ľ��̼������У���Ƶȡ� RST����λݔ�����_����ʎ���ڹ����r��RST���_�������F(xi��n)�ɂ���ɂ����ϵęC�����ڸ��ƽ��ʹ��Ƭ�C�M�Џ�λ��WDT �����ʹԓ���_ݔ�����ƽ���O��SFR AUXR��DISRT0 λ����ַ8EH���ɴ��_���P(gu��n)�]ԓ���ܡ�DISRT0λȱʡ��RESETݔ�����ƽ���_��B(t��i)�� ALE�������L���ⲿ��(sh��)��(j��)�惦�������惦���r��ALE����ַ�i�棩��Ҫ������ݔ���}�_���i���ַ��8λ�ֹ�(ji��)��ALE߀�������ڌ���ݔ���r���̖�r���ܣ����ALE�r���ԕr���ʎ����1/6�l��ݔ���̶����}�_��̖�� ֵ��ע����ǣ����҂����L���ⲿ��(sh��)��(j��)�惦���r�������^һ��ALE�}�_����F1ash�惦���������g��ԓ���_߀������ݔ�뾎���}�_��߀����ͨ�^����Ĺ��ܼĴ����е�8EH��Ԫ��D0λ�Á���ֹALE��������(zh��)��ԓ��������Ҫͨ�^MOVX��MOVCָ��ALE���ܱ�����Ķ��֏�����B(t��i)���ڈ�(zh��)�І�Ƭ�C�ⲿ����r��ALE���O�Þ�oЧ�� ����ă������ڣ������Sݔ���ⲿ����惦���r�M�У�����Ƭ�C��Ҫ�M���x����(sh��)��(j��)�r���˕rԓ���_��ÿ�������¾͕��ɴ���Ч���Ķ��l(f��)���ɴ��}�_�����L���ⲿ�Ĕ�(sh��)��(j��)�惦���r���t�ǰl(f��)��һ���}�_��̖�� ��VPP���ⲿ�L�����S����EA���O�Þ���ƽ�r��CPU�ɆΪ��L���ⲿ����惦��������0000H��FFFFH��ַ���� XTAL1����ʎ���ķ���Ŵ����̓�(n��i)���r犰l(f��)������ݔ��ˡ�
3.1.2��Ƭ�C��Сϵ�y(t��ng)���O�� ���λ��چ�Ƭ�C��ͨ��̖������ϵ�y(t��ng)���OӋ�Ć�Ƭ�C��Сϵ�y(t��ng)�O�õ����D��ʾ: 
�D3.2 AT89C51��Ƭ�C��Сϵ�y(t��ng)�D
3.2 LCD1602оƬ��B������ 3.2.1 Һ���@ʾ���Ľ�B Һ���@ʾ���ж�N�������ͨ�����@ʾ�ķ�ʽ�ֿɷ֞��ַ�ʽ����ʽ���c�ʽ�ȡ�Һ���@ʾ�������@ʾ�ڰ��ֿ��@ʾ���ɫ�Ҷȣ���˿ɷ֞�ڰ��@ʾ���Ͳ�ɫ�@ʾ����������(q��)�ӷ�ʽ�֣����ֿ��Է֞�μ�����(q��)�ӣ�Simple Matrix�����o�B(t��i)�(q��)�ӣ�Static�������Ӿ���(q��)�ӣ�Active Matrix�����N��Һ���@ʾ�������к�ȱ����w�eС���m���ڴ�Ҏ(gu��)ģ�����·���(q��)�ӵ����c��Ŀǰ�яV�������ڔ�(sh��)�֔z��C����yʽ��X��MP3��MP4��PDA�Ƅ�ͨ�Ź��ߵ��I(l��ng)��
3.2.2 Һ���@ʾ�����N�D�ε��@ʾԭ�� Һ���@ʾ��������Һ�����������ԣ�ͨ�^�ߵ�늉��������@ʾ�ą^(q��)���ƽ�t�������ƽ�t�磬�@�ӾͿ����@ʾ���D�Ρ�Һ���@ʾ���D�ε��@ʾ��ͨ�^N*M��Һ���@ʾ��Ԫ��(g��u)�ɣ�ͨ�^���Ƹ����@ʾ��Ԫ���������_���@ʾ�D�ε�Ŀ�ġ�����һ��Һ���@ʾ����64���@ʾ������ÿ����128�У�ÿ�ֹ�(ji��)����8�нM�ɣ����ÿ�п��@ʾ16���ֹ�(ji��)���������@ʾ�����@ʾ1024���ֹ�(ji��)�����ͨ�^����Һ���@ʾ����λ�õ������Ķ��@ʾ��ÿ�ֹ�(ji��)�ϵă�(n��i)�ݡ�
3.2.3 LCD1602�Ļ�������(sh��)�����_���� LCD1602���ؘʵ�14�_���o���⣩��16�_�������⣩�ӿڣ������OӋ����16�_�������⣩���@ʾ�ꡢ�¡��ա��r���֡��롢���ں͜ضȡ������_�ӿ��f�����3.3��ʾ: ��1�_��VSS����Դ�� ��2�_��VDD��5V���Դ�� ��3�_��VL���@ʾ�����ȶ��{(di��o)���ˣ����ӵ���̖�rҺ�����ȶ���ߣ��������Դ�r���ȶ����������ȶȵĸߵ͌���Ӱ�Һ���@ʾ�����@ʾ�����ȶ��^�ߕr���a(ch��n)������Ӱ��������҂�ͨ����һ��10K���λ�����{(di��o)��(ji��)�� ��4�_��RS�ǼĴ������x���ƽ��ʾ��(sh��)��(j��)�Ĵ��������ƽ��ʾָ��Ĵ����� ��5�_��R/W����̖�����x���������ƽ�r��ʾ�����M���x��������?sh��)��ƽ�r��ʾ�����M�Ќ����������RS��R/Wͬ�r����ƽ�r���M���@ʾ��ַ��?q��)���ָ����RS����ƽ��R/W����ƽ�r���M���xȡ��̖�����RS����ƽR/W����ƽ�r���M�Ќ��딵(sh��)��(j��)�� ��6�_��E����ʹ����̖�ˣ���E���ɸ��ƽ׃������ƽ�r��Һ��ģ�K�����_ʼ��(zh��)�С� ��7��14�_��D0��D7��8λ�p��(sh��)��(j��)���� ��15�_������Դ���O�� ��16�_������Դؓ�O��
��3.3���_�ӿ��f���� ��̖ | ��̖ | ���_�f�� | ��̖ | ��̖ | ���_�f�� | 1 | VSS | �Դ�� | 9 | D2 | ��(sh��)��(j��) | 2 | VDD | �Դ���O | 10 | D3 | ��(sh��)��(j��) | 3 | VL | Һ���@ʾƫ�� | 11 | D4 | ��(sh��)��(j��) | 4 | RS | ��(sh��)��(j��)/�����x�� | 12 | D5 | ��(sh��)��(j��) | 5 | R/W | �x/���x�� | 13 | D6 | ��(sh��)��(j��) | 6 | E | ʹ����̖ | 14 | D7 | ��(sh��)��(j��) | 7 | D0 | ��(sh��)��(j��) | 15 | BLA | ����Դ���O | 8 | D1 | ��(sh��)��(j��) | 16 | BLK | ����Դؓ�O |
3.2.4 LCD1602��ָ���f�����r�� LCD1602��(n��i)��Һ���@ʾģ�K������ָ�11�l�����3.4��ʾ�� LCD1602���x����������˲����Լ���Ļ�@ʾ�ȶ���ͨ�^���Nָ���������F(xi��n)�ģ����w�f�����£���ע��1����ƽ��0����ƽ�� ָ��1�����@ʾ��ָ��a��01H��λ��00Hλ�á� ָ��2����ˏ�λ����(zh��)�Еr��ˌ����ص�00Hλ�á� ָ��3������Լ��@ʾģʽ���O�á���˵��Ƅӷ���飺���ƽ��ʾ���ƣ����ƽ�t��ʾ���ơ�S:��Ļ�����Ƿ��M�����ƻ����M�����ơ����ƽ��ʾ��Ч�����ƽ��ʾ�oЧ�� ָ��4���@ʾ�����_�P(gu��n)��B������W�q�Ŀ��ƣ����ƽ��ʾ�W�q�����ƽ�t��ʾ���W�q�� C������_�P(gu��n)�Ŀ��ƣ����ƽ��ʾ�й�ˣ����ƽ�t��ʾ�o��� ��D�����w�@ʾ���_�P(gu��n)���ƣ����ƽ��ʾ���_�@ʾ�����ƽ�t��ʾ�P(gu��n)�]�@ʾ�� ָ��5����˻����@ʾ��λ S/C�Ŀ��ơ����ƽ��ʾ�����Ƅӵ��@ʾ�����ƽ��ʾ��˵��Ƅӡ� ָ��6������������O�á�DL����ƽ��ʾ4λ���������ƽ�t��ʾ8λ������F: ���ƽ��ʾ�@ʾ5x7���c��ַ������ƽ��ʾ�@ʾ5x10���c��ַ��� N�����ƽ��ʾ�����@ʾ�����ƽ��ʾ�p���@ʾ ָ��7���ַ��l(f��)����RAM��ַ�O�á� ָ��8��DDRAM��ַ���O�á� ָ��9����˵�ַ���xæ��̖�� BF����ʾæ��־λ�����ƽ�r��ʾæ���˕rģ�K�����M��������ߔ�(sh��)��(j��)�Ľ��ܣ����ƽ�t��ʾ��æ�� ָ��10������(sh��)��(j��)�� ָ��11���x��(sh��)��(j��)
��3.4 ��������� ��̖ | ָ�� | RS | R/W | D7 | D6 | D5 | D4 | D3 | D2 | D1 | D0 | 1 | ���@ʾ | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 2 | ��˷��� | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | * | 3 | ��ݔ��ģʽ | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | I/D | S | 4 | �@ʾ�_/�P(gu��n)���� | 0 | 0 | 0 | 0 | 0 | 0 | 1 | D | C | B | 5 | ��˻��ַ���λ | 0 | 0 | 0 | 0 | 0 | 1 | S/C | R/L | * | * | 6 | �ù��� | 0 | 0 | 0 | 0 | 1 | DL | N | F | * | * | 7 | ���ַ��l(f��)�����A����ַ | 0 | 0 | 0 | 1 | �ַ��l(f��)�����A����ַ | 8 | �Ô�(sh��)��(j��)���A����ַ | 0 | 0 | 1 | �@ʾ��(sh��)��(j��)���A����ַ | 9 | �xæ��־���ַ | 0 | 1 | BF | Ӌ��(sh��)����ַ | 10 | ����(sh��)��(j��)��CGRAM��DDRAM�� | 1 | 0 | ����Ĕ�(sh��)��(j��)��(n��i)�� | 11 | ��CGRAM��DDRAM�x��(sh��) | 1 | 1 | �x���Ĕ�(sh��)��(j��)��(n��i)�� |
LCD1602Һ���@ʾ���ж�N�������Ј����Ҋ����HD44780��HD44780��(n��i)����DDRA��80�ֹ�(ji��)����CGRAM��64�ֹ�(ji��)���Á�����Ñ��Զ��x�ַ���ÿ���ַ���Ҫ�õ�8���ֹ�(ji��)��������һ�����Դ��8���Ñ��Զ��x�ַ�����CGROM����(n��i)����160���ַ��������˘˜ʵ�ASCII�a���ϵ��ַ��ȣ����cHD44780����ݵ�оƬ�r������3.5��ʾ��
��3.5 ���������r��� �x��B(t��i) | ݔ�� | RS=L��R/W=H��E=H | ݔ�� | D0��D7=��B(t��i)�� | ��ָ�� | ݔ�� | RS=L��R/W=L��D0��D7=ָ��a��E=���}�_ | ݔ�� | �o | �x��(sh��)��(j��) | ݔ�� | RS=H��R/W=H��E=H | ݔ�� | D0��D7=��(sh��)��(j��) | ����(sh��)��(j��) | ݔ�� | RS=H��R/W=L��D0��D7=��(sh��)��(j��)��E=���}�_ | ݔ�� | �o |
�x�������r����D3.3��3.4��ʾ�� 
�D3.3 �x�����r�� 
�D3.4�������r�� LCD1602Һ���@ʾ��һ�����@ʾ����������ÿ���ڈ�(zh��)��ָ��rһ��Ҫ���M�д_�Jģ�K��æ��־λ�Ƿ����ƽ�����ָ���ʧЧ��Ҫ�M���ַ����@ʾ������Ҫ�M��ݔ���@ʾ�ַ��ĵ�ַ�����H����ݔ���@ʾ�ă�(n��i)�ݡ�LCD1602��(n��i)���@ʾ��ַ��D3.5��ʾ��  
��Һ��ģ�K�ij�ʼ����Ҫ���O�����@ʾģʽ����Һ��ģ�K�@ʾ�ַ��r��ˌ����Ԅ����ơ�Һ��ģ�K�ڷ�æ��B(t��i)������ݔ��ָ� 3.2.5 LCD1602Һ���@ʾģ�Kԭ��D LCD1602�@ʾģ�K�·������VSS�ӵ���̖��VDD��5V���ƽ��VEE��10K��׃������׃�����ɶ˷քe��5V늉��ʹ�ء�����RS��RW��E�ǔ�(sh��)��(j��)��̖���քe�ӆ�Ƭ�C��P2.5��P2.6��P2.7���_�����D0��D7�ӆ�Ƭ�C��P0.0��P0.7���_��Ҫ�����衣�����H��LCD1602߀�Ѓɂ������{(di��o)��(ji��)���_���քe��BLA��BLK��5V늉��ʹ�ء� 
�D3.6 LCD1602�@ʾ�· 3.3 DS1302оƬ��B������ DS1302������ DALLAS ��˾�Ƴ���һ�N�����ܡ����ĵĕr�оƬ�������� SPI �����ӿ��c CPU �M��ͬ��ͨ�ţ����ɲ���ͻ�l(f��)��ʽһ����һ��������ֹ�(ji��)�ĕr���̖�� RAM��(sh��)��(j��)�������ṩ�ꡢ�¡��ա����ڡ��r���֡����Ӌ�r�@ʾ�������씵(sh��)�����M���Ԅӵ��{(di��o)����ͬ�r߀�����c����a�����ܡ�����늉�������2.5��5.5V��DS1302оƬ�����p�Դ��늣��������Դ�͂����Դ��ͬ�r߀���O�Â����Դ�ij�늷�ʽ���ṩ�ˌ������Դ�M�������늵�������DS1302Ҳ�����ڔ�(sh��)��(j��)��ӛ䛣� �e�nj���ijЩ�������x�Ĕ�(sh��)��(j��)�c��ӛ��ϣ����܌��F(xi��n)��(sh��)��(j��)�͔�(sh��)��(j��)���F(xi��n)�ĕr�gͬ�rӛ䛣�����ڸ��N�y��ϵ�y(t��ng)�еõ��V���đ��á�
3.3.1 DS1302���_���� DS1302оƬ���ⲿ���_������D3.7��ʾ�� 
�D3.7 DS1302���ⲿ���_����
Vcc1����ʾ���Դ��Vcc2����ʾ����Դ����� Vcc2>Vcc1+0.2V�� �t Vcc2�� DS1302��늣���� Vcc2< Vcc1���ɄtVcc1�� DS1302��늡� SCLK�����Еr犣�ݔ�룬���Ɣ�(sh��)��(j��)��ݔ���cݔ���� I/O�������ӿڕr���p��(sh��)��(j��)���� CE��ݔ����̖��DS1302���M���x����(sh��)��(j��)�r����λ��횞�ߡ�ԓ���_�Ѓɂ����ܣ�������CE �_ʼ�������M���L����λ�Ĵ�����߉���ƣ������CE �ṩ�Y(ji��)�����ֹ�(ji��)���߶��ֹ�(ji��)��(sh��)��(j��)�Ă�ݔ������
3.3.2 DS1302�x���f�� DS1302�� SPI ������ʽ���(q��)�ӡ������H��Ҫ��Ĵ�����������֣� ͬ�r߀��Ҫ�xȡ�����Ĵ����Ĕ�(sh��)��(j��)��
1��DS1302���x���Ĵ��� DS1302�ĕr�g�Ĵ���������12���������x�Ĵ�����81H-8DH���͌��Ĵ�����81H-8DH������BCD�a��ʽ�M�Д�(sh��)��(j��)�Ĵ�ȡ�� ��3.6 DS1302���x���Ĵ��� DS1302С�r�Ĵ�����84H��85H����λ7������DS1302���\�е�ģʽ����12С�r��߀��24С�r�ơ���λ7��1�r����ʾ12С�rģʽ���˕r�����ļĴ���λ5��ߕr��ʾAM,��͕r��ʾPM����λ7��0�r�� ��ʾ24С�rģʽ�� DS1302��Ĵ�����80H��81H����λ7�����ڕr犕�ͣ��־��CH��λ����ԓλ��1�r���r���ʎ��ֹͣ��DS1302̎�ڵ��Ġ�B(t��i)����ԓλ��0�r���r��_ʼ�\�С� DS1302 ���ƼĴ�����8EH��8FH����λ7�nj��뱣�oλ������7λ����0����WPλ��0�r�����_ʼ�M�Ќ��r犺�RAW�M�Ќ��룬��WPλ��1�r����ֹ���Ĵ����Č��������
2��DS1302���o�B(t��i)RAM��ַ DS1302���o�B(t��i)����ģʽ�µ�RAW��ַ���3.7��ʾ�� ��3.7 �o�B(t��i) RAM �ĵ�ַ��
3��DS1302�Ĺ���ģʽ�Ĵ��� DS1302�Ĺ���ģʽ�Ĵ����ַ֞�r�ͻ�l(f��)ģʽ�Ĵ�����RAWͻ�l(f��)ģʽ�Ĵ����ȡ�ͻ�l(f��)ģʽ��ָһ���Ͷ����ֹ�(ji��)�ĕr���̖�� RAM ��(sh��)��(j��)�� ͻ�l(f��)ģʽ�Ĵ������3.8��ʾ�� ��3.8ͻ�l(f��)ģʽ�Ĵ���
4��DS1302�����ַ��� DS1302�Ŀ��������λ��λ7�������1�������M�Д�(sh��)��(j��)�Č��룬��t���܌��딵(sh��)��(j��)���θ�λ��λ6����ʾRAW��(sh��)��(j��)���ߕr��՚v�Ĵ�ȡ������1�r��ʾRAW��(sh��)��(j��)��ȡ����0�t��ʾ�r��՚v�Ĵ�ȡ�������ǔ�(sh��)��(j��)������ַ��λ5-λ1���������λ0��ʾ��(sh��)��(j��)���x������������1�r��ʾ�x��������0��ʾ�����������3.9��ʾ�� ��3.9 �����֣�����ַ�������ֹ�(ji��)�� 
5��DS1302���x���r�� DS1302��(sh��)��(j��)���x��Ҏ(gu��)�t���ڿ����ֵĻ��A(ch��)�Ϗĵ�λ����λ��ݔ����ÿ��������ָ��ݔ�����һ��SCLK�}�_�����ص���r����(sh��)��(j��)�͕������뵽DS1302�У���(sh��)��(j��)�����λ�_ʼ���룬��һ��SCLK�}�_���½��ص���r���͕��x��DS1302����Ĕ�(sh��)��(j��)���x����Ҏ(gu��)�tҲ�Ǐĵ�λ����λ�� 
�D3.8 ��(sh��)��(j��)�x���r��
3.3.3 DS1302�r犲ɼ�ģ�Kԭ��D 
�D3.9 DS1302ԭ��D �ˈD��DS1302�r�оƬģ�K�ɼ�ԭ��D��X1��X2�ӵ��Ǖr犾���,,��С��32.768MHz��VCC1��VCC2�քe��3V��5V늉���I/O��SCLK��ST�քe�ӆ�Ƭ�C��P1.6��P1.7��P1.5���_��
3.4 DS18B20оƬ��B������ DS18B20��(sh��)�֜ض�Ӌ��DALLAS��˾���a(ch��n)��One��Wire�����ο����������������w�eС���Ҿ�·���εă�(y��u)�c����ֻ���������_���քe�ǽӸ��Դ������̖��һ�l��(sh��)��(j��)��̖�����OӋ���ζ��ַ��㡣������V�������ڜضȵĜy��ϵ�y(t��ng)�� DS18B20�����w�eС����·�OӋ����(y��u)�c�⣬���ڌ��H�����в���Ҫ�����ⲿ�κ��������Ɍ��F(xi��n)�ضȵĜy�ع��ܣ��y���ضȷ����飭55��+125 ��C ֮�g,�糬���z�y�Ĝض�,DS18B20�����l(f��)������̖����(sh��)�֜ض�Ӌ���xȡ���ԏ�9λ��12λ�x���Ô�(sh��)��(j��)����늣���늷���+3.0-5.5V늉���
3.4.1 DS18B20���_���� DS18B20�����ķ��b���_���м����_���ܵ�������D3.10�ͱ�3.10�� 
�D3.10����ҕ�D��
��3.10 DS18B20���_���� | | | | | | | | ��(sh��)��(j��)ݔ��/ݔ�����_���_©�ο����ӿ����_���������ڼ����Դ�£�Ҳ�����������ṩ�Դ�� | | | ���x���VDD���_���������ڼ����Դ�r�������_��횽ӵء� |
3.4.2 DS18B20�đ��ü�ԭ��D DS18B20���õ���one��Wire�����f(xi��)�h��ʽ�B�ӣ����H������һ����(sh��)��(j��)���M�Д�(sh��)��(j��)���p���ݔ����Ȼ������51��Ƭ�C��Ӳ���ϲ���֧�ֆο����f(xi��)�h��ʽ���B�ӣ�����҂�����ܛ���ķ�����ģ�M�ο����ąf(xi��)�h��ʽ����Ɍ�DS18B20�ض�оƬ���L���� DS18B20���x������һ��I/O�����M�У���ˣ�����(sh��)��(j��)���x�����������Ҫ��DS18B20��ͨ�Ņf(xi��)�hҲ���������Ҫ����_����(sh��)��(j��)��ݔ?sh��)����_�Ժ������ԡ� DS18B20�Ї����ͨ�Ņf(xi��)�h�����C��λ��(sh��)��(j��)��ݔ?sh��)����_�Ժ������ԡ�ԓͨ�Ņf(xi��)�h�ּ����ˎN��̖�ĕr������ʼ���r���x�r���r��Ȼ�����@�N�r��Ĺ����¶��������C�������O�䣬�ο�������������O�䡣��(sh��)��(j��)�Ă�ݔ�������C�Ȇ����x��r���x����(sh��)��(j��)���M�댑�r������Ķ������x���r���ܣ���ɔ�(sh��)��(j��)�Ă�ݔ����(sh��)��(j��)������Ă�ݔ���ǵ�λ���ȡ������DS18B20�ڱ����OӋ�ĜضȲɼ�ģ�Kԭ��D3.11��ʾ��  �D3.11 DS18B20�ضȲɼ�ԭ��D
�ضȲɼ�ģ�K�D��Ҫ����DS18B20оƬ�M�У�ͨ�^AT89C51��Ƭ�C�M�Д�(sh��)��(j��)�Ă�ݔ�ͽ��ܣ��Ķ����͵�LCD1602����LCD1602�@ʾ������DS18B20ֻ���������_���քe��VCC�����Դ��5V늉���GND����̖�Ӵ�أ������DQ��(sh��)��(j��)ݔ��/ݔ�����_�B��AT89C51��Ƭ�C��P1.0���_��
4 ������OӋ����4.1 ��ͨ�������OӋ������ 4.1.1��Ӌ�r�@ʾ����Փ���� ���ö��r���Д࣬�O�� TH0= (65536-50000)/256��TH1��(65536-50000)%256����ÿ0.05���Д�һ�Ρ�ÿ����20���Д༴�^��20*0.05�룽1��r��ʹ�r�g��Ӌ��(sh��)ֵ�p1���㌍�F(xi��n)�˵�Ӌ�r�Ĺ��ܡ�
4.1.2��B(t��i)���@ʾ����Փ���� �S���W�qͬ�ӿ������ö��r���Дࡣÿ����10���Д༴�^��10*0.05�룽0.5��r��ʹ�S����־λ���ã������S��1���W�qһ�Ρ�
4.1.3 ��ͨ���������OӋ���� ��ͨ��ϵ�y(t��ng)������ģʽ�¹����� - ���ȣ������M��ϵ�y(t��ng)�_ʼ�\�У���ͨ����Ĭ�J����ģʽ�¹�������(sh��)�a���@ʾ�r�g��60��
- ��ͨ��̖���_ʼ�������������D(zhu��n)���鳣�������Gɫ�����ϱ�ֱ�з���G�����������������t������(sh��)�a���_ʼ��Ӌ�r���ϱ������40��Ӌ���|�������60��Ӌ��
- 35S���ϱ�ֱ�з����G�����W�q�S�����W�q�r�g��5S��
- 40S���ϱ�ֱ�з������t�������D(zhu��n)�������G�������r15S��ͬ�r��(sh��)�a��20��Ӌ��������׃��
- 55S���ϱ����D(zhu��n)�����G�����W�q�S�����W�q�r�g��5S��
- 60S���ϱ����D(zhu��n)�����S���磬���t������(sh��)�a��60��Ӌ���|��ֱ�з������G������(sh��)�a��40��Ӌ��������׃��
- 95S�|��ֱ�з����G�����W�q�S�����W�q�r�g��5S��
- 100S�|��ֱ�з�����S�������t�������D(zhu��n)�������G�������r��15S��ͬ�r��(sh��)�a��20��Ӌ��������׃��
- 115S�|�����D(zhu��n)�����G�����W�q�S�����W�q�r�g��5S��
- 120S�|�����D(zhu��n)������S�������t������(sh��)�a��60��Ӌ���ϱ�ֱ�����G������(sh��)�a��40��Ӌ��

�D4.1 �����OӋ���̈D
4.2�f��v���OӋ���� �f��v���O��һ������Ը��õ��@ʾ�r�g�͜ضȣ���ο��Ԍ���ͨ��̖��ϵ�y(t��ng)�Ŀ��ƣ����r��ͨ��̖������ϵ�y(t��ng)�l(f��)���ⲿ�Д࣬�Ķ�ԓ׃��ǰ����ģʽ,�����ڌ��H�и����Ќ����ԡ�

�D4.2 �f��v���������̈D
�˴��f��v���OӋ������Ҫ�ǃɂ���һ����ͨ�^LCD1602�@ʾ�r�g�͜ضȣ���һ���t�Ǟ齻ͨ��̖���ṩ�ⲿ���r�Д࣬�Ķ���׃��ǰ�Ĺ���ģʽ�����f��v���OӋ���̺���ͨ�OӋ��һ�ӣ��_ʼ���nj����NоƬ�ij�ʼ���������Ǐ�DS1302��DS18B20�xȡ�r�g�͜ض���Ϣ���Ķ����͵�AT89C51��Ƭ�C�M�Еr�g���ضȵķ��x�D(zhu��n)�����ق��͵�LCD1602�@ʾ����������Ǖr�g���{(di��o)����У����ͨ�^�{(di��o)�����I���Ԍ��롢�֡��r�����ڡ��ա��º����M�мӜp1���ġ�����Ƕ��r�l(f��)���ⲿ�Д࣬����IF�Z���M���Д࣬�m�ϗl���tݔ�����ƽ����ͨ��̖������t����ƽ���Ķ��_���ˌ���Ŀ�ġ�
4.3�f��v�r�g���{(di��o)������ �����f��vϵ�y(t��ng)���OӋֻ�Dz���DS1302�M�Еr�g�Ē�����xȡ�����]���M�е�늱����·���OӋ�������ÿ��Ӳ�����_����ϵ�y(t��ng)�����M���ʼ���O�ã�����Ҫ�M�Еr�g���{(di��o)����У���� 
�D4.3 �r�g�{(di��o)�����ƈD �r�g���{(di��o)�������OӋ�����ȣ�ϵ�y(t��ng)�����������£���DS1302�r�оƬ�M�Еr�g���xȡ�����f��AT89C51��Ƭ�C�M�Ќ��r�g�M�з��x���D(zhu��n)���������LCD1602�@ʾ���������M�Еr�g���{(di��o)����У���r�����M���{(di��o)��ģʽ�������µ�һ�����I����(zh��)���{(di��o)�����������M��������{(di��o)�������Ӝp���I�������M�м�1��p1���ٰ��{(di��o)���ГQ�I�M��ֳ����{(di��o)�������Ӝp�p�M�������ļ�1�p1���ٽ����Ǖr�����ڡ��ա��¡�����{(di��o)�������Ӝp�I�M�������ļӜp1�����M���{(di��o)��;�У�������˳��r�g�{(di��o)�����I�������˳��r�g�{(di��o)��������D4.3�r�g�{(di��o)�����ƈD��ʾ�� 4.4��ͨ��̖ϵ�y(t��ng)����ģʽ�Ĺ�������

�D4.4 ����ģʽ�ГQ�D �_ʼ�M��ϵ�y(t��ng)�r��Ĭ�Jģʽ������ģʽ60S����������7:00�r�ϰ�߷��ڣ��f��v�l(f��)���Д࣬�Ķ�ʹϵ�y(t��ng)�M�뷱æģʽ45S���Ķ����Ԝp��·���Ͻ�ͨ�ē��¡��r�g��������9:00��܇�v��u�p�٣��f��v�ְl(f��)�����r�Д�ʹϵ�y(t��ng)�M������ģʽ������11��00���f��v�ٴΰl(f��)�����r�Д࣬����ʹϵ�y(t��ng)�M�뷱æģʽ���p��܇�v�ē��¡���������14:00���f��v�l(f��)�����r�Д࣬ʹϵ�y(t��ng)�M������ģʽ��������ģʽ���\�е�����17:00�°��r�g�����˜p�ٽ�ͨ�ē��£��f��v�l(f��)�����r�Д࣬ʹϵ�y(t��ng)�M�뷱æģʽ����������19:00��������܇�v�p�٣��f��v���l(f��)�����r�Д࣬ʹϵ�y(t��ng)������ģʽ�������\�С�ϵ�y(t��ng)������ģʽ����æģʽ������ģʽ���\�Еr��߀�����M���ⲿ�ք��M���Д����M��ͨ�Еr�g���{(di��o)�����磺������ģʽ�°��·�æģʽ��ϵ�y(t��ng)�����M�뷱æģʽ�����´��Д��ٴε���r��ϵ�y(t��ng)������(j��)�Д��Ҫ����M��������ģʽ���������ϴ��Д���´��Д��Ӱ푡�
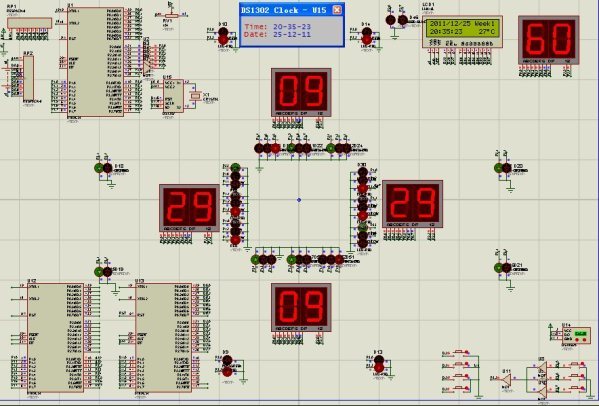
5 ܛӲ���ķ����{(di��o)ԇ5.1 PROTEUS����D ������ͨ������ϵ�y(t��ng)��PROTEUS����D�еķ���������ʾ���p��ͨ�У���Ӌ�r��2λ�r�g���ѡ�ÿ��·�ڷքe�����D(zhu��n)��ֱ�к����D(zhu��n)���քe�мt�����G�����S����ʾ��ÿ��·��߀�����������˵ļt�G��ָʾ ���D���Ͻǔ�(sh��)�a���@ʾ�Ĺ���ģʽ��60������������ģʽ�¹�����45��75�քe�������ڷ�æģʽ������ģʽ�����½����_�P(gu��n)�{(di��o)��(ji��)���I����߅�����_�P(gu��n)���ϵ����ǽ�ͨ�����Nģʽ�D(zhu��n)�Q�_�P(gu��n)����߅�Ă��Ǖr�g�{(di��o)��(ji��)�_�P(gu��n)���Ķ������Ќ����ԡ� �D5.1 PROTEUS����D
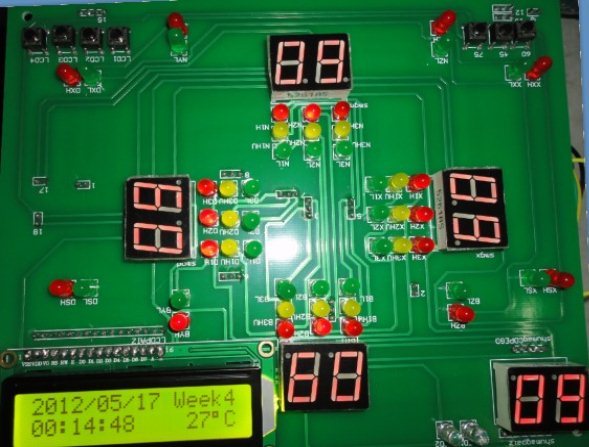
5.2 Ӳ������D �˴�Ӳ��������OӋ�֞�ɲ��֣�һ����������������OӋ����һ�������@ʾ������OӋ������������OӋ��Ҫ�dž�Ƭ�C����Сϵ�y(t��ng)�O�á�DS1302�r�ģ�K���O�á�DS18B20�ض�ģ�K���O���Լ����T74HC04���O�õȣ��@ʾ������O����Ҫ��LCD1602Һ���@ʾģ�K����������(sh��)�a�ܵ�Ӌ�r����(sh��)�a���@ʾϵ�y(t��ng)����ģʽ���������ڵĽ�ͨ�������е��Ľ�ͨ���Լ������_�P(gu��n)�{(di��o)��(ji��)���I���O�á��ɲ��ֵķ��_�OӋ����ʹ�����@�ø����^��ͬ�r���ڌ�����������ĺ��{(di��o)��Ҳ�ṩ�˸��õėl����Ҳ��(li��n)ϵ�ˌ��H����@�ú��Ρ����������^�� �@ʾ������D5.2��ʾ�� �D5.2 Ӳ������D
�Y(ji��) Փ���λ��چ�Ƭ�C�Ľ�ͨ��̖������ϵ�y(t��ng)���OӋ����һ�㽻ͨ���Ļ��A(ch��)�ϼ��ϕr�g�����ܿ��ƣ��Ķ���׃������ͨ�еĕr�g����˱������ܽ�ͨ�����OӋ���Ը��õĽ�Q��܇�����^���ʮ��·��܇�v��ͨ�У��cһ�㽻ͨ����ȣ��������Ќ����ԡ����λ������ܻ����Ķ�Ҳ���õđ��õ����H�����У���˾���һ���Č��Ãrֵ�� �˴λ��چ�Ƭ�C�Ľ�ͨ��̖������ϵ�y(t��ng)���OӋ�����f�õ��˳ɹ�������߀�Ǵ��ںܶ�IJ����ȱ�ݡ��磺����ģʽ�ĕr�gֻ�����N�x������ͨ�^���I�M���S����ģ�����ģʽ�r�g�������ГQҲ�����M���ք��{(di��o)��(ji��)���Լ���ͨ�^����܇�����Ľy(t��ng)Ӌ��܇�v�ٶȵęz�y���Ĕz���ܵȶ�߀�]���F(xi��n)�����Ҵ˴��OӋ��Ҫ�õ������Ԫ�����^�࣬�Ľ�(j��ng)���ϲ����㣬��˱��λ��چ�Ƭ�C�Ľ�ͨ��̖������ϵ�y(t��ng)���OӋҲ߀�������ܴ�IJ��㣬߀�д����ơ�
�� �x
�v�r�����µĮ��I(y��)�OӋ�ѽ�(j��ng)��һ���䡣��(j��ng)�^�Լ����������Ŭ���Լ�����ޱ�ώ�������ָ���͟�����������OӋ�ѽ�(j��ng)������ɡ�ͬ�rϵ���dȤС�M����ҵ��_�źʹ��dȤС�Mͬ�WҲ���ҵ��OӋ�ṩָ�����������Ď�����ָ���µõ�����ɡ��ڴˌ��������Ď����o�c��̵����x��
�ڱ��λ��چ�Ƭ�C�Ľ�ͨ��̖���Ŀ���ϵ�y(t��ng)�OӋ��һ·�����˺ܶ�����y�����ȏ��_ʼ�·ԭ��D���OӋ����PCB�D���ư嶼���������y�����nj�оƬ�IJ����⣬���I(y��)֪�R�IJ���Ķ������ڳ���ľ����н�(j��ng)�����e���������������{(di��o)ԇ�У����ڱ����OӋ�֞�ɉK�·�壬��·�������Ҳ������y�Ȇ��}���������ώ���ͬ�W�Ď����Ą���һһ�õ��˽�Q��
ͨ�^�@�ή��I(y��)�OӋ��ʹ�Ҍ��Լ�����һ����̵��J�R���J�R�����Լ����I(y��)֪�R�IJ���͌��I(y��)֪�R����Ҫ�ԣ�ͬ�rҲ��������ՓҪ(li��n)ϵ���H���x��ͨ�^�@�εĮ��I(y��)�OӋҲ�z����Լ���W����ČW���ɹ����J�R�����Լ��IJ����ȱ�ݣ��ڽ��Ĺ����͌W���Ќ����^�m(x��)Ŭ�����������ƣ��Ķ�����İl(f��)չ�������õĻ��A(ch��)��
��������ˮƽ���ޣ��OӋ��һ��߀���ںܶ��֮̎����Ո��λ�ώ����uָ����
��䛳���Ҋ������

������Word��ʽ�ęn51�����d��ַ��
 ��ͨ���OӋ-���I(y��)Փ��.doc
(1.18 MB, ���d��(sh��): 22)
��ͨ���OӋ-���I(y��)Փ��.doc
(1.18 MB, ���d��(sh��): 22)
2018-11-23 17:04 �ς�
�c���ļ������d����
| 

 ����TQQ:125739409;���g(sh��)����QQȺ281945664
����TQQ:125739409;���g(sh��)����QQȺ281945664