���ɾ��̿�����PLC�Ć�Ƭ�C���F(xi��n)��ȫ���O(sh��)Ӌ�Y�ϰ���

0.png (44.31 KB, ���d��(sh��): 67)
���d����
2018-11-6 01:26 �ς�
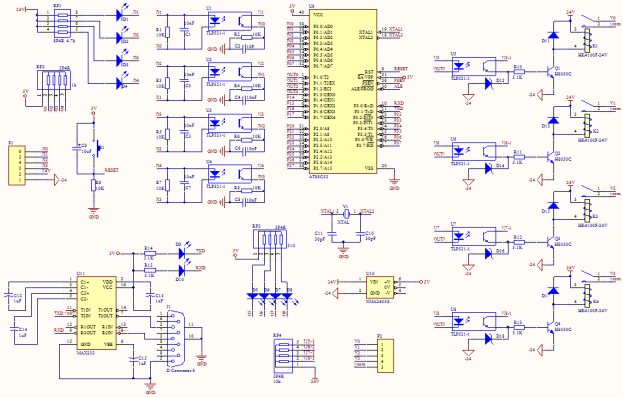
�·ԭ��D���£�
0.png (97.79 KB, ���d��(sh��): 70)
���d����
2018-11-6 01:30 �ς�
0.png (51.65 KB, ���d��(sh��): 56)
���d����
2018-11-6 01:26 �ς�
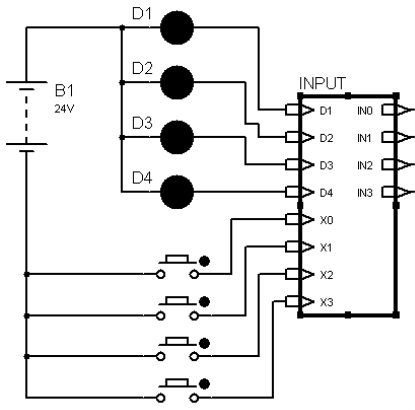
2.3 �Æ�Ƭ�C���F(xi��n)PLC�����w�O(sh��)Ӌ�����O(sh��)Ӌ��AT89C52��Ƭ�C�O(sh��)Ӌ��һ��4ݔ��4ݔ���ĺ���PLC�� ԓPLC����10�����r����10��Ӌ��(sh��)����ÿ�����r�������L���r�r�g��3276.75�룬ÿ��Ӌ��(sh��)�������Ӌ��(sh��)ֵ��65535�� ԓPLC��ݔ�뷽ʽ��ֱ���_�P(gu��n)����ݔ��늉���24V�� ݔ�������^���ݔ����ʽ�����ÅR���^���HK4100F-24V-SHG��ԓ�^�����С�͡�С�����^������|�c��ʽ�dz��_�ͣ��~��늉���DC24V��ֱ������1�������������2A��ጷ����Ҳ��2A����Ȧ���ʞ�4W���~�������l�ʞ�5Hz�� �������ϵ�y(t��ng)�Ŀ��ɔ_������ݔ��ݔ���·�ж�ʹ���˹���������������������TLP521-1�� ԓPLC�����cӋ��ͨӍ������������Ӌ��C�����d���� �O(sh��)Ӌ��PLC���w���^�D��D2.15��ʾ��
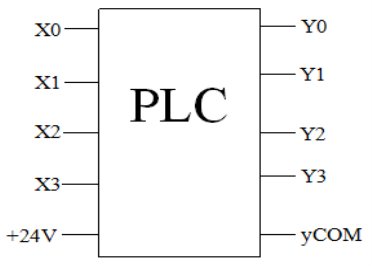
�D2.15 PLC���w�O(sh��)Ӌ�����^�D
�D2.15�У�ݔ��˿�X0��X1��X2��X3�քe�چ�Ƭ�C��P0.0��P0.1��P0.2��P0.3ͨ�^ݔ���·���B�ӡ�ݔ���˿ڿ�Y0��Y1��Y2��Y3�քe�چ�Ƭ�C��P1.0��P1.1��P1.2��P1.3ͨ�^ݔ���·���B�ӡ�+24V��ݔ���Դ���Դ�cݔ��˿��g���Խ��_�P(gu��n)���_�P(gu��n)��ݔ���b�á�ݔ���˿ں�yCOM��֮�g���Ñ��Ŀ����·�������Ǻ��ε�LED����Ҳ������ֱ��늙C������늙C���Ñ������·�е��Դ������ֱ��Ҳ�����ǽ����� ����(j��)ݔ��˿ڵĠ�B(t��i)����Ƭ�C�\�����ΈD�������D(zhu��n)�Q�Ɇ�Ƭ�C�Ɉ�(zh��)�е��Z�ԣ�������ݔ���˿ڵĠ�B(t��i)�������Ñ����ԣ�ֻ��Ҫ֪���D2.15�е�10����ӵĶ˿ڣ�����ݔ��ݔ���·�Լ���Ƭ�C�c�@Щ�·���B�ӣ��Ñ��o���˽⡣�@�ӱ㌍�F(xi��n)��һ���Æ�Ƭ�C�����ĺ���PLC��
��3�� ϵ�y(t��ng)Ӳ���O(sh��)Ӌ
3.1 Ӳ���O(sh��)Ӌ����Ӳ���O(sh��)Ӌ��Ҫ���O(sh��)Ӌ����·���e���O(sh��)ӋI/O�ӿڡ�ϵ�y(t��ng)Ӳ���O(sh��)Ӌ��D3.1��ʾ�������O(sh��)Ӌ��Ӳ�������@Ҫ���傀���֣�ݔ���·��ݔ���·����ʎ�͏�λ�·���Դ�D(zhu��n)�Q�·������ͨ���·�����ڱ����O(sh��)Ӌ���^���Σ�ֻ���Ă�ݔ����Ă�ݔ�����]����չ��(n��i)�档
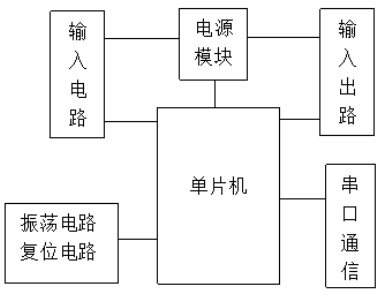
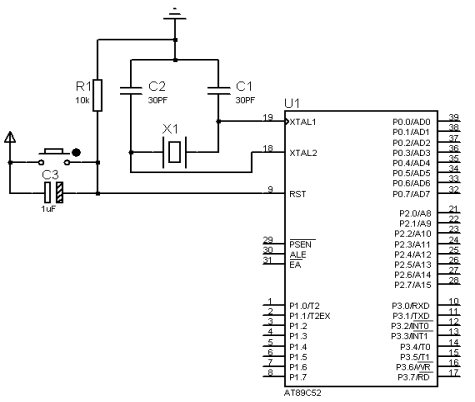
�D3.1 Ӳ���O(sh��)Ӌ�D 3.2 ��Ƭ�C��Сϵ�y(t��ng)PLC����ϵ�y(t��ng)����Ҫ�����nj��F(xi��n)���N߉���^�̿��ƣ����Ӳ����ݔ��ݔ���ӿ����ஔ�ߵ�Ҫ��CPU ��PLC �ĺ��ģ�����(j��ng)�Ие����ã�CPU ���\���ٶȺ̓�(n��i)��������PLC����Ҫ����(sh��)���Q����PLC �Ĺ����ٶȡ�I/O ��(sh��)����ܛ�������ȣ����Ҳ����������Ҏ(gu��)ģ���Æ�Ƭ�C���F(xi��n)PLC����CPU���H�Ͼ��dž�Ƭ�C������x�ú��m�Ć�Ƭ�C������K���F(xi��n)��PLC�Ĺ���Ӱ푺ܴ�[8] �����O(sh��)Ӌʹ�õĆ�Ƭ�C��AT89C52��AT89C52 ������ATMEL��˾���a(ch��n)�ĵ�늉���������CMOS 8λ��Ƭ�C��Ƭ��(n��i)��8KB�Ŀɷ��Ͳ�����Flash ֻ�x����惦����256 bytes ���S�C��ȡ��(sh��)��(j��)�惦����RAM������������ATMEL��˾�ĸ��ܶȡ�����ʧ�Դ惦���g(sh��)���a(ch��n)���c�˜�MCS-51ָ��ϵ�y(t��ng)��8052�a(ch��n)Ʒ���_���ݣ�Ƭ��(n��i)��ͨ��8λ����̎������CPU����Flash �惦��Ԫ��������AT89C52 ��Ƭ�C�m�����S���^����s���Ƒ�(y��ng)�È��ϡ�AT89C52��Ƭ�C������PLC��(y��ng)���ṩ���`���ҵͳɱ��ķ���������Сϵ�y(t��ng)�O(sh��)Ӌ��D3.2��ʾ��
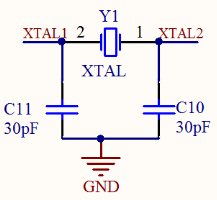
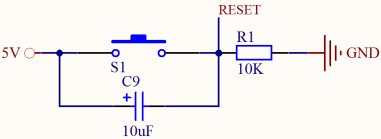
�D3.2 ��Ƭ�C��Сϵ�y(t��ng) 3.2.1 ��ʎ�·��Ƭ�Cϵ�y(t��ng)�ﶼ�о��Y(ji��)�φ�Ƭ�C��(n��i)���·�a(ch��n)����Ƭ�C����ĕr��l�ʣ���Ƭ�C�����ṩ�ĕr��l��Խ�ߣ���ô��Ƭ�C�\���ٶȾ�Խ�죬��Ƭ�C��һ��ָ��Ĉ�(zh��)�ж���Ҫ��Ƭ�C�����ṩ�ĕr��l�ʡ� �D3.3 ��ʎ�·�D ��Ƭ�C����������Ǟ�ϵ�y(t��ng)�ṩ�����ĕr���̖��ͨ��һ��ϵ�y(t��ng)����һ�������ڸ����ֱ���ͬ�������O(sh��)Ӌʹ��12MHz�ľ��w��ʎ��������ʎԴ�����چ�Ƭ�C��(n��i)��������ʎ�·�������ⲿֻҪ�B��һ������̓ɂ���ݼ��ɣ��������һ����15pF��50pF֮�g�� 3.2.2 ��λ�·��λ�����dž�Ƭ�C�ij�ʼ�����������ǕrCPU��ϵ�y(t��ng)����������̎��һ���_���ij�ʼ��B(t��i)��ϵ�y(t��ng)���@����B(t��i)�_ʼ��������Ƭ�C�Џ�λ��̖���_RST�����ڏ���������λ��̖����Ƭ�C�ď�λ�·���^���Σ���D3.4��ʾ��RESET�ӆ�Ƭ�CRST���_���چ�Ƭ�C�{(di��o)ԇ������\�Еr�����������C����ѭ�h(hu��n)��������w������r������λ�IS1����Ƭ�C�͌������ӡ���ɏ�λ��������24����B(t��i)���ڡ���λ�Y(ji��)����Ƭ�C�ĵ�ַ0000H�_ʼ��(zh��)�г���[9]
�D3.4 ���
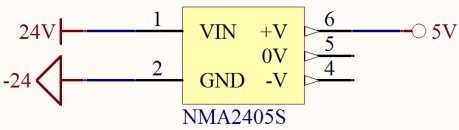
�D3.4�У�RESET�ӆ�Ƭ�CRST���_�����IS1���º�λ�˽Ӹ��ƽ�����F(xi��n)�·��λ����Ƭ�C��RST�˼�һ�����}�_���Ɍ��F(xi��n)��λ����ϵ�y(t��ng)��늵�˲�g��RST�c�Դ늉�ͬ�λ���S����ݵ�늉���u������RST�λ�½���������RST�γ�һ�����}�_�� 3.3 �Դ�O(sh��)Ӌ��ڶ�����������PLC�Ȕ�(sh��)��ϵ�y(t��ng)�����r����Ҫ���N�Դ��һ��ݔ����̖�Դ�����ǃ�(n��i)��Ԫ���������Դ������ؓ�d�����Դ���Դģ�K������ϵ�y(t��ng)����ʮ����Ҫ�����ã����ϵ�y(t��ng)�]��һ�����õġ��ɿ����Դϵ�y(t��ng)�����ǟo�����������ģ�����Դ���O(sh��)Ӌ������ʮ����Ҫ��[8] ؓ�d�����Դ���Á��(q��)��PLC ݔ���O(sh��)�䣨ؓ�d�����ṩݔ����̖�ģ��ַQ�Ñ��Դ���Ñ��Դ��������ݔ���O(sh��)���PLC ��ݔ���·�Q�������ڱ�ϵ�y(t��ng)�� ��I/O �·���ОV�������x���ܣ������ⲿ�Դ��PLC ������Ӱ푲����Ñ��Դ�����ڱ����O(sh��)Ӌ�еă�(n��i)�ݡ� ���˜pС�O(sh��)Ӌ�ď��s�ԣ��Դģ�K��ϵ�y(t��ng)�\���ṩ��(n��i)�������Դ��ͬ�r��ݔ����̖�ṩ�Դ�����O(sh��)Ӌ�е��Դ�O(sh��)Ӌ���ê�����DC24V��DC5V늉��D(zhu��n)�Qģ�K��ݔ����̖���_�P(gu��n)��ݔ�룬ݔ��늉���24V���Դģ�K��ݔ����̖��24V늉��D(zhu��n)�Q�ɹ���Ƭ�C������5V늉������˜pС�Դ�Ĕ�(sh��)�������x���^����r�x����24V��ֱ���^������Դģ�K���·��D3.5��ʾ�� DC24V��DC5V늉��D(zhu��n)�Qģ�KNMA2405S��NMAϵ���Ǫ�����ֱ��/ֱ���D(zhu��n)�Q�����_�P(gu��n)��С���M���Դϵ�y(t��ng)�dz����η��㡣
�D3.5 �Դ�·
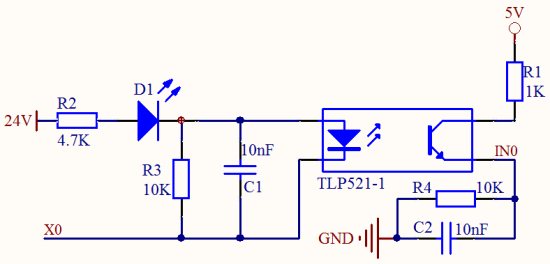
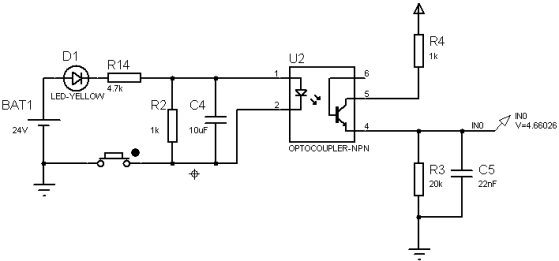
3.4 ݔ���·PLC�������ϵ�y(t��ng)�Ŀ��ɔ_��������ݔ���·�����и��N���ɔ_�O(sh��)Ӌ�����O(sh��)Ӌ��ݔ���·Ҳ����PLC������̖ݔ�뵽��Ƭ�Cǰ�M���˞V��̎�������ù����ό�ݔ���Դ�cϵ�y(t��ng)�Դ���_���D3.6��ݔ���·߉���x�ϵ�ʾ��D���D�е�INPUT��һ�����·�D����������Ă���ͬ��ݔ���·�����H���·��3.7��ʾ���D3.7��ֻ������һ·ݔ�룬����ݔ���·�c֮��ͬ���D3.6��D1��D2��D3��D4��ݔ���B(t��i)ָʾ����X0��X1��X2��X3���Ă�ݔ��ˣ�ͨ�^���o�cݔ���Դ24V��ؓ�O���B�ӣ����I���£�����(y��ng)��LED�͕�����IN0��IN1��IN2��IN3�ӆ�Ƭ�C��P0.0��P0.1��P0.2��P0.3�� �D3.6 ݔ���·���D
���O(sh��)Ӌ��ݔ����_�P(gu��n)��ݔ�롣ݔ���·���չ��I(y��)�F(xi��n)��ݔ���O(sh��)����_�P(gu��n)��̖������̖�D(zhu��n)�Q��PLC��(n��i)����Ƭ�C�ɽ��ܵĵ�늉���̖�����F(xi��n)PLC��(n��i)����̖��늚���x�����O(sh��)Ӌ��ݔ����̖�x��ֱ��ݔ�뷽ʽ��ԓ��ʽ�ӕr�r�g�^�̣�߀����ֱ���c����_�P(gu��n)�����ݔ���O(sh��)���B�ӡ��_�P(gu��n)��ݔ��ģ�K��ݔ����̖늉��ȼ��x��24V���m���ڂ�ݔ���x�^���Ĉ��ϡ��������ϵ�y(t��ng)�Ŀɿ��ԣ���Ҫ���]ݔ���T������ĸߵͣ��T�����Խ�ߣ����ɔ_����Խ������ݔ���xҲԽ�h�������O(sh��)Ӌ���C��̖����r�����5��7mA�����]�������·�Ŀ��ɔ_���ܣ��p���O(sh��)��֮�g�ĸɔ_���_�P(gu��n)��ݔ���·�ĸ��x���ù���������[8] �D3.7 ݔ���·
�D3.6�c�D2.2�ڱ��|(zh��)��һ�ӵģ��nj��D2.2�ľ��w�����D3.4�У�X0��PLC��һ��ݔ��ˡ�D1����ָʾԓݔ���c���_�P(gu��n)��B(t��i)��ݔ����̖�c��Ƭ�C֮�g�ù�������TLP521-1���_��R2��������裬ͬ�r�c���C1��(g��u)�ɞV���·��ȥ̎���l�ɔ_������ݔ������s�飺��24-2��/4.7=4.7mA������������һ��(c��)�(q��)�����һ����4.5mA ���ϣ��M���O(sh��)ӋҪ��R3��C1��(g��u)���ӕr�·��һ�λ�·��ݔ����̖���ӕr��IN0�B�ӆ�Ƭ�C��ݔ��˿�P0.0����ݔ���X0�c�Դ�˽����Ñ�ݔ���·����D2.2���Ñ��·�ж����O(sh��)���_�P(gu��n)������_�P(gu��n)�]�ϣ����������İl(f��)����O�����ڵĻ�·��ͨ�����������İl(f��)����O�ܰl(f��)�⣬�������������O�܌�ͨ��IN0����ƽ��D1�l(f��)�⣬��ʾԓݔ���c�ѽ�(j��ng)��ͨ�� 3.5 ݔ���·ݔ���·���ڌ���Ƭ�C��(n��i)���ĵ�늉���̖�D(zhu��n)�Q���(q��)���ⲿݔ���O(sh��)����_�P(gu��n)��̖�����Ҍ��F(xi��n)PLC��(n��i)����̖��늚���x�����O(sh��)Ӌ��ݔ���·���^���ݔ����ʽ���@�ӿ����(q��)�ӽ���ؓ�d��Ҳ�����(q��)��ֱ��ؓ�d��ʹ�õ�늉���С�����^����ͬ�r����현��^늉����^����������^�����c���l��ݔ���;��w��ݔ����ȣ�Ψһ��ȱ�c���|�Ԫ�������^���������^�̣����m�����l��ͨ��Ĉ��ϡ�ݔ���·��ݔ������(q��)��������횴���PLC����O(sh��)����~������������Ҫ����(j��)ݔ���O(sh��)��������С���_��ݔ���·��ݔ�������[8]
�D3.8 ݔ���·���D
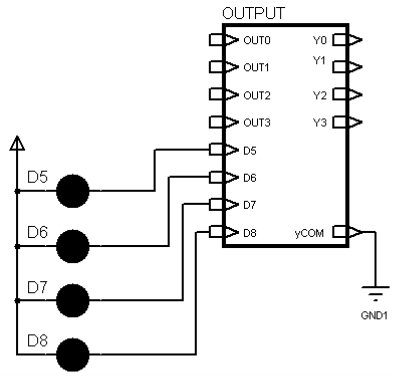
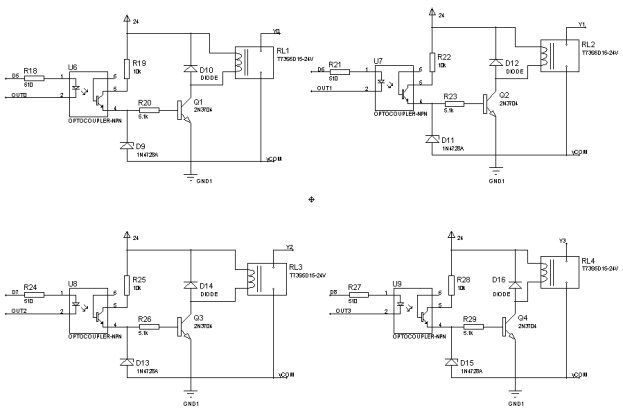
�D3.8��ݔ���·߉���x�ϵ�ʾ��D���D�е�OUTPUT��һ�����·�D����������Ă���ͬ��ݔ���·�����H���·��3.9��ʾ���D3.9��ֻ������һ·ݔ��������ݔ���·�c֮��ͬ���D3.8��OUT0��OUT1��OUT2��OUT3�ӆ�Ƭ�C��P1.0��P1.1��P1.2��P1.3��D5��D6��D7��D8��ݔ����B(t��i)ָʾ����Y0��Y1��Y2��Y3�Ă�ݔ���ˣ��Ñ��·����ݔ���˺�yCOM֮�g��
�D3.9 ݔ���·
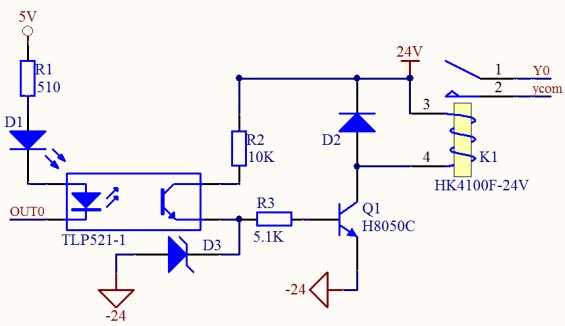
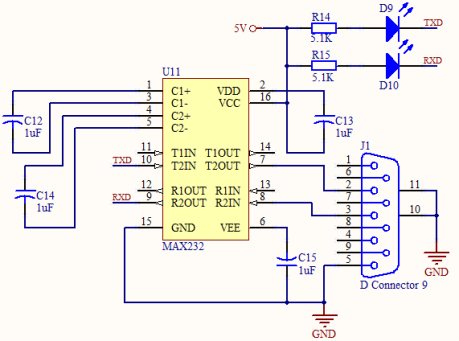
�D3.9�c�D2.6�ڱ��|(zh��)��һ�ӵģ��nj��D2.6�ľ��w����5V�Դ��PLC �ă�(n��i)���Դ��24V �Դ���_�P(gu��n)��ݔ���Դ���ɂ��Դ�Ǹ��x�ġ��D3.7�У�Y0��PLC��һ��ݔ���ˡ�D1����ָʾԓݔ���c���_�P(gu��n)��B(t��i)��ݔ����̖�c��Ƭ�C֮�gҲ�ù�������TLP521-1���_��R1��������衣D2���Է�ֹ�^����_���r�ķ��������D3��һ���R�{��(w��n)���ܣ���Q1���O�Ͱl(f��)��O֮�g늉���(w��n)����OUT0�B�ӆ�Ƭ�C��ݔ���˿�P1.0�����ÅR���^���HK4100F-24V-SHG��ԓ�^�����С�͡�С�����^������|�c��ʽ�dz��_�ͣ��~��늉���DC24V��ֱ������1�������������2A��ጷ����Ҳ��2A����Ȧ���ʞ�4W���~�������l�ʞ�5Hz�� ��OUT0 �ӿڶ�ݔ�����ƽ�r����(j��ng)��������ʹ�(q��)�Ӿ��w��Q1��ͨ���^���K1������ϣ�ͬ�rD1�l(f��)�⡣��OUT0�ӿ�ݔ�����ƽ����(j��ng)��������ʹQ1 ��ֹ��K1ጷţ�D1Ϩ�硣 3.6 ����ͨ���·���O(sh��)Ӌ��λ�C�������d�r����RS-232Cͨ�Žӿڼ��g(sh��)��RS-232C�dz��õ��c���c����ͨ�ż��g(sh��)�����Æζ���̖��ݔ��ʽ����PC �C�͆�Ƭ�C�B����һ�𣬌��F(xi��n)���ΈDĿ�˴��a�����d��ͨӍ�·��D3.10��ʾ�� �D3.10����Ҫ�õ���оƬMAX232��ԓоƬ�����������݃x����˾��TI���Ƴ���һ�����RS232�˜ʵ�оƬ����Ƭ�Cʹ�õ���TTL�ƽ(+5V����ƽ�����ƽ��0V)����Ӌ��C�Ĵ��ڞ�RS-232C�ƽ�����и��ƽ��-12V�����ƽ��+12V��RS-232C�ƽ��ؓ߉�ƽ��MAX232 �����Á��M���ƽ�D(zhu��n)�Q�ġ�ԓ���������ɂ��(q��)�������ɂ������������ĵ�9��10��11��12 ���_��TTL �ƽ�ˣ��Á��B�ӆ�Ƭ�C��7��8��13��14���_�ǽ�PC�C�ġ�
�D3.10 ����ͨ���·
�ڈD3.10�У�D9��D10�ɂ��l(f��)����O���Á�ָʾ�˕r�Ƿ���ͨ�������M�С�����ͨ�ŵĔ�(sh��)��(j��)��ݔ�^�����£�MAX232��10�_T2IN�ӆ�Ƭ�CTXD��P3.1��TTL�ƽ�Ć�Ƭ�C��TXD�˰l(f��)������(j��ng)�^MAX232�D(zhu��n)�Q��RS-232�ƽ���MAX232��7�_T2OUT�l(f��)�������B�ӵ�ϵ�y(t��ng)���ϵĴ������ĵ�2�_RXD������Ӌ��C�˽��յ���(sh��)��(j��)��PC�C�l(f��)�͔�(sh��)��(j��)�r��PC�C�������ϵĵ�3�_TXD�˰l(f��)����(sh��)��(j��)�������������Ƭ�C��RXD��P3.0���Ք�(sh��)��(j��)��
��4�� ϵ�y(t��ng)ܛ���O(sh��)Ӌ
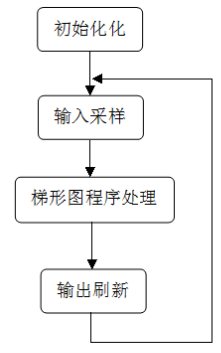
4.1 ϵ�y(t��ng)����Y(ji��)��(g��u)һ��������PLCϵ�y(t��ng)�������̈D��D4.1��ʾ��ԓ�D�nj��D2.8�ĺ��������O(sh��)Ӌ��ܛ��������Ҫ��ģ��PLC��ѭ�h(hu��n)������ݔ��ɘӳ����ݔ������?q��)��κΑ?y��ng)�ó�����һ�ӵģ��@������ϵ�y(t��ng)�������ΈD̎��̎��������Ҫᘌ���ͬ�đ�(y��ng)�þ�����ͬ�ij���
�D4.1 ϵ�y(t��ng)�������̈D
���O(sh��)Ӌ�ľ����Z������C�Z�ԺͅR���Z�ԃɷN���R���Z�ԵĈ�(zh��)��Ч��Ҫ��C�Z�Ըߣ������x�Ա��^�C�Z�Ծ��̺��������x�Ժã���C�Z�ԕ�ռ�ø���ă�(n��i)���YԴ�� C�Z�Գ����������ļ�����IO.h������timer_counter.h������main.c������functions.c������timer_counter.c���͡�process.c�����^�ļ���IO.h���nj�ݔ��ݔ���˿��Լ�ݔ��ݔ���˿�ӳ��Ĵ����������^�ļ���timer_counter.h���Ƕ��r����Ӌ��(sh��)�����������r����Ӌ��(sh��)���Ķ��x��C�ļ���timer_counter.c���С�C�ļ���main.c����ϵ�y(t��ng)��������C�ļ���functions.c�����dz�ʼ������ݔ�����ݔ������ȵľ��w���F(xi��n)��C�ļ���process.c�����Ñ�������ͬ���Ƴ�����ļ���ԓ�ļ��Ѓ�(n��i)����Ҫ�Ñ�����(j��)���ΈD�������������傀�ļ�����Ҫ�Ñ��P(gu��n)�ģ��Ñ�ֻ��Ҫ�˽�һЩ�ӿڼ��ɡ��@�N�O(sh��)Ӌʹ�Ñ�ֻҪ�P(gu��n)ע��Ό����ΈD�����D(zhu��n)�Q��C�Z�ԣ����@�N�D(zhu��n)�Q�����������^���Ρ� �R���Z�Գ���ֻ��һ���ļ����������������֣��A���x���֣�ϵ�y(t��ng)����(sh��)���ֺ��Ñ����֡��A���x�����nj�ݔ��ݔ���˿��Լ�ݔ��ݔ���˿�ӳ��Ĵ����Ķ��x��߀����Ӌ��(sh��)���Ͷ��r���Ķ��x��ϵ�y(t��ng)���ְ���������(sh��)��ݔ��/ݔ������(sh��)�����r������Ӌ��(sh��)�������Ñ������ǹ��Ñ�����(j��)���ΈD������IJ��֡� 4.2 ϵ�y(t��ng)������ϵ�y(t��ng)����������Ҫ��ģ�MPLC��ѭ�h(hu��n)������ʽ�����������{(di��o)�����Ă�����(sh��)��initi()�dz�ʼ������getIn()��ݔ��ɘӳ���process()���Á����g���ΈD��������ΈD̎������getOut()��ݔ��ˢ�³����@�Ă�����ľ��w���xҊ���µ�4.3��4.4��4.8��4.5�� ���������£� void main() { initi(); while(1) { getIn(); process(); getOut(); } }
�R���������� Main: ACALL Initi Loop: ACALL GetIn LCALL Process ACALL GetOut SJMP Loop �R���Z���е�Initi�dz�ʼ������GetIn��ݔ��ɘӳ���Process���Á����g���ΈD��������ΈD̎������GetOut��ݔ��ˢ�³����@�Ă�����ľ��w���xҊ���µ�4.3��4.4��4.8��4.5�� �����ϵij�����l(f��)�F(xi��n)���Æ�Ƭ�C���F(xi��n)PLC��ѭ�h(hu��n)�����^�̣��ڳ����ϱ��^�����F(xi��n)���Y(ji��)��(g��u)�������������⡣�������и����Ӻ���(sh��)�ľ��w���xҊ�������¸���(ji��)��(n��i)�ݡ� 4.3 ��ʼ��������ʼ����������ϵ�y(t��ng)�M��ѭ�h(hu��n)��������횵��A̎�������O(sh��)Ӌ�ij�ʼ����������Ҫ�������һЩ������ݔ�롢ݔ����ʼ�����O(sh��)�����ж��r���ĕr�g����(sh��)�����r����ʼ����Ӌ��(sh��)����ʼ������C�Z�Գ������¡� void initi() { P0=0x00; P1=0xFF; TMOD=0x01; TH0=0x3C; TL0=0x0B0;
EA=1; ET0=1;
initi_timer(); initi_counter(); TR0=1; } initi_timer()�Ƕ��r����ʼ������initi_counter()��Ӌ��(sh��)����ʼ�������籾���_ʼ���������@�ɂ�����(sh��)���x������C�ļ�"process.c"���Ǟ��˷����Ñ����Ñ��ھ����Ñ�̎������r���ܕ�ʹ�ö��r����Ӌ��(sh��)�����@����Ҫ�����r����Ӌ��(sh��)���M�г�ʼ�������@�ɂ�������Ñ�̎���������һ���ļ��У�ʹ�Ñ�ֻ��Ҫ�P(gu��n)עһ���ļ�����ע�����ΈD������D(zhu��n)�Q�� �R���������£� Initi: MOV SP, #78H MOV P0, #00H MOV P1, #0FFH MOV TMOD, #01H MOV TH0, #3CH MOV TL0, #0B0H SETB EA SETB ET0
LCALL Initi_Timer LCALL Initi_Counter
SETB TR0 RET Initi_Timer��Initi_Counter�քe�Ƕ��r����ʼ�������Ӌ��(sh��)����ʼ������ ���r�������Ӌ��(sh��)������Ҋ���µ�4.6��4.7�� 4.4 ݔ�����ݔ��������ԙz�y�Ă�ݔ���c���_�P(gu��n)��B(t��i)���������Ȱ��Ă�ݔ��ӳ��Ĵ������㣬Ȼ�����Ιz�y�Ă�ݔ��˿ڣ�����z�y��ԓݔ��˞���ƽ���t�ӕr10���룬��Ҫ����ȥ�����I���ӣ�����ӕr10����֮���ٴΙz�y����ԓݔ����Ԟ���ƽ���t��ԓݔ���c��ӳ��Ĵ�����1����t��0������õ���ݔ��ӳ��Ĵ����IJ�ͬ��B(t��i)�����Ñ�������ʹ�á�In0��In1��In2��In3�քe�����Ƭ�C���Ă�ݔ��˿�P0.0��P0.1��P0.2��P0.3��InMap0��InMap1��InMap2��InMap3�քe���Ă�ݔ��˿ڵ�ӳ��惦����ÿ��ӳ��惦��ռһλ�惦���g�����xӳ��惦�����H��Ҳ��Ч�ط�ֹ��ݔ����̖�ĸɔ_�������ϵ�y(t��ng)�Ŀ��ɔ_������ݔ��������£� void getIn() { InMap0=0; InMap1=0; InMap2=0; InMap3=0;
if(In0) { delay10ms(); if(In0) InMap0=1; }
if(In1) { delay10ms(); if(In1) InMap1=1; }
if(In2) { delay10ms(); if(In2) InMap2=1; }
if(In3) { delay10ms(); if(In3) InMap3=1; } } �R���������£� GetIn: CLR InMap0 CLR InMap1 CLR InMap2 CLR InMap3
JNB In0, CHK1 LCALL KT10MS JNB In0, CHK1 SETB InMap0
CHK1: JNB In1, CHK2 LCALL KT10MS JNB In1, CHK2 SETB InMap1
CHK2: JNB In2, CHK3 LCALL KT10MS JNB In2, CHK3 SETB InMap2
CHK3: JNB In3, EndCHK LCALL KT10MS JNB In3, EndCHK SETB InMap3
EndCHK:RET 4.5 ݔ������ݔ��������^���Σ���ÿ���������ڣ�����Ҫ��ݔ��ӳ��Ĵ�����ֵ�x�oݔ���ˣ������^��ݔ��ˢ�¡�Out0��Out1��Out2��Out3�քe�����Ƭ�C���Ă�ݔ���˿�P1.0��P1.1��P1.2��P1.3��OutMap0��OutMap1��OutMap2��OutMap3�քe���Ă�ݔ���˿ڵ�ӳ��惦����ÿ��ӳ��惦��ռһλ�惦���g��ݔ���������£� void getOut() { Out0=~OutMap0; Out1=~OutMap1; Out2=~OutMap2; Out3=~OutMap3; } �R���������£� GetOut: MOV C, OutMap0 CPL C MOV Out0, C MOV C, OutMap1 CPL C MOV Out1, C
MOV C, OutMap2 CPL C MOV Out2, C
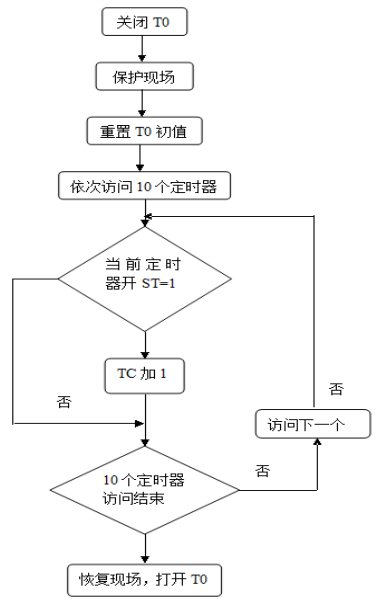
MOV C, OutMap3 CPL C MOV Out3, C RET �eҪע����ǣ����O(sh��)Ӌ��ݔ���r�ǵ��ƽ��ʾݔ����Ч��Ҋ�D3.9������ؓ߉�����������ΈD̎�������МpС�Ñ���ؓ���������ΈD̎��������ʹ�������������߉��ֻ��ݔ���r�����е�ӳ��Ĵ���ȡ���������@���ȡ��������ӳ��惦�����ֵȡ�����@�ӕ��Ɖ��Ñ������ij����nj�ӳ��惦���෴��ֵ�x�o����(y��ng)��ݔ���ˡ� 4.6 ���r������PLC�еĶ��r�������ӕr�^����Ĺ��ܣ�ͨ�������ж��������]����Ƭ�C��(n��i)���YԴ���ޣ����O(sh��)Ӌ�ж��x��10�����r�������r����Ҫһ���y(t��ng)һ�ĕr犣��Æ�Ƭ�CƬ��(n��i)��T0�����y(t��ng)һ�ĕr犡�T0ÿ0.05���Д�һ�Σ�T0���O(sh��)���ڳ�ʼ�������С���˶��r��������ɂ����֣�һ���Ƕ��r�Д����(w��)������һ���Ƕ��r��߉ָ����� 4.6.1 ���r���Ķ��x���r�����Ă����ֽM�ɣ����r��߉λ����ʼֵ�����r��Ӌ��(sh��)�����|�l(f��)���Ә�־�����r�������C�Z�ԵĽY(ji��)��(g��u)�w���x���^�������⡣���r���ĽY(ji��)��(g��u)�w���x���¡� struct tim { Bit DT; //���r��߉λ�������־�� unsigned int K; //��ֵ unsigned int TC; //���r��Ӌ��(sh��)�� Bit ST; //�|�l(f��)���Ә�־ } timer[10]; ���r����Ӌ��(sh��)��ռ�ɂ��ֹ�(ji��)�����ֵ��65535������ÿ�Д�һ�Σ�Ӌ��(sh��)����1����˶��r�������L���r�r�g��3276.75�롣 4.6.2���r�Д����(w��)�������r�Д����(w��)��������̈D��4.2��ʾ�� �D4.2 �Д����(w��)�������̈D[10]
����(j��)���̈D������C�������¡� void interT0() interrupt 1 { unsigned char i;
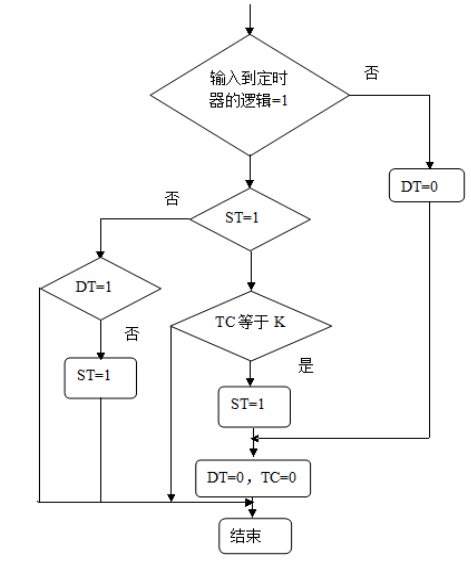
TR0=0; TH0=0x3c; TL0=0xb0; for(i=0;i<10;i++) { if(timer[ i].ST) timer.TC++; } TR0=1; } �R���������£� IT0Int: CLR TR0 PUSH PSW PUSH ACC MOV TH0, #3CH MOV TL0, #0B0H JNB ST0, Next1 INC TC0_L MOV A , TC0_L JNZ Next1 INC TC0_H Next1: JNB ST1, Next2 INC TC1_L MOV A , TC1_L JNZ Next2 INC TC1_H Next2: JNB ST2, Next3 INC TC2_H MOV A , TC2_L JNZ Next3 INC TC2_L Next3: JNB ST3, Next4 INC TC3_L MOV A , TC3_L JNZ Next4 INC TC3_H Next4: JNB ST4, Next5 INC TC4_L MOV A , TC4_L JNZ Next5 INC TC4_H Next5: JNB ST5, Next6 INC TC5_L MOV A , TC5_L JNZ Next6 INC TC5_H Next6: JNB ST6, Next7 INC TC6_L MOV A , TC6_L JNZ Next7 INC TC6_H Next7: JNB ST7, Next8 INC TC7_L MOV A , TC7_L JNZ Next8 INC TC7_H Next8: JNB ST8, Next9 INC TC8_L MOV A , TC8_L JNZ Next9 INC TC8_H Next9: JNB ST9, EndInt INC TC9_L MOV A , TC9_L JNZ EndInt INC TC9_H EndInt: POP ACC POP PSW SETB TR0 RETI 4.6.3���r��߉ָ��������r��߉ָ���������Ҫע���|�l(f��)���Ә�־�Εr���_�����̈D��D4.3��ʾ�� �D4.2 ���r���������̈D[10]
����(j��)���ϵ����̈D������C�Z�Գ������¡� void time(unsigned char n,bit in) { if(in) { if(timer[n].ST) { if(timer[n].TC==timer[n].K) { timer[n].DT=1; timer[n].ST=0; timer[n].TC=0; } } else { if(timer[n].DT!=1) timer[n].ST=1; } } else { timer[n].DT=0; timer[n].ST=0; timer[n].TC=0; } } �����е�n�Ƕ��r���ľ�̖����Чֵ��0��9��in�Ǯ�ǰ��߉�\��ֵ�� �R��������Ҫ���քe����ÿ�����r����߉ָ���������������ͬ�ġ����涨�r��0�����������R���������¡��R�������Ю�ǰ߉�\��ֵ��λ�ۼ���C�С� Tim0: JNC Off0 JNB ST0, Open0
MOV A, TC0_L CJNE A, K0_L, Exit0 MOV A, TC0_H CJNE A, K0_H, Exit0 SETB DT0 SJMP Rest0
Open0: JB ST0, Exit0 JB DT0, Exit0 SETB ST0 RET
Off0: CLR DT0 Rest0: CLR ST0 MOV TC0_H, #00H MOV TC0_L, #00H
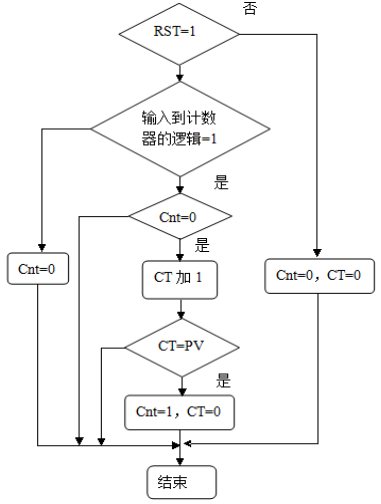
Exit0: RET 4.6.4���r����ʼ���Ñ���Ҫ���õ��ö��r���M�г�ʼ����C�Z�Գ�ʼ���������¡��������ь���ʼ���ķ�������Ԕ�����f���� void initi_timer() { /*timer[n].K=t/0.05;*/ } �����е�n��ʹ�õĶ��r����̖��0-9)��t�Ƕ��r�ĕr�g,���L���r�r�g��3276.75�롣 �R���Z�Զ��r���ij�ʼ���������¡� Initi_Timer: /* MOV Kn_L, #Low MOV Kn_H, #High*/ RET ������Low=t/0.05%256��High=t/0.05/256�� 4.7 Ӌ��(sh��)����S7-200�е�Ӌ��(sh��)���м�Ӌ��(sh��)�����pӋ��(sh��)���ͼӜpӋ��(sh��)�������O(sh��)Ӌ��Ӌ��(sh��)�����ڼ�Ӌ��(sh��)����S7-200�е�Ӌ��(sh��)����D4.3��ʾ����Ӌ��(sh��)���ď�λ��R���_����ݔ���}�_CU�z�y��ݔ����̖����׃�r��ǰֵ��1��ֱ���_��PV���O(sh��)��ֵ�r��Ӌ��(sh��)����߉λ��λ�� �D4.3 ��Ӌ��(sh��)�� 4.7.1 Ӌ��(sh��)���Ķ��x����ĽY(ji��)��(g��u)�w���x��Ӌ��(sh��)���ĽY(ji��)��(g��u)�� struct ct { Bit Cnt; //Ӌ��(sh��)��߉λ�������־�� unsigned int PV; //��ֵ unsigned int CT; //Ӌ��(sh��)�� Bit RST; //��λ��־ } counter[10]; ���x��10��Ӌ��(sh��)����Ӌ��(sh��)����ʼֵ����65535�� 4.7.2Ӌ��(sh��)������Č��F(xi��n)����(j��)S7-200�еļ�Ӌ��(sh��)����Ӌ��(sh��)�������̈D��D4.4��ʾ�� �D4.4 Ӌ��(sh��)���������̈D
����(j��)���ϵ����̈D����Ӌ��(sh��)����C�Z�Գ������¡� void count(unsigned char n,bit in) { if(!counter[n].RST) { if(in) { if(!counter[n].Cnt) counter[n].CT++; if(counter[n].CT==counter[n].PV) { counter[n].Cnt=1; counter[n].CT=0; } } else counter[n].Cnt=0; } } else { counter[n].Cnt=0; counter[n].CT=0; } } �����е�n��Ӌ��(sh��)���ľ�̖����Чֵ��0��9��in�Ǯ�ǰ��߉�\��ֵ�� �R��������Ҫ���քe����ÿ��Ӌ��(sh��)���ij�������������ͬ�ġ�����Ӌ��(sh��)��0�����������R���������¡��R�������Ю�ǰ߉�\��ֵ��λ�ۼ���C�С� COUNT0: JB RST0,Reset0 JNC CExit0 JB C0, End0
INC C0_L MOV A , C0_L JNZ CN0 INC C0_H
CN0: MOV A, C0_L CJNE A, PV0_L, End0 MOV A, C0_H CJNE A, PV0_H, End0 SETB C0 MOV C0_L, #0 MOV C0_H, #0 RET
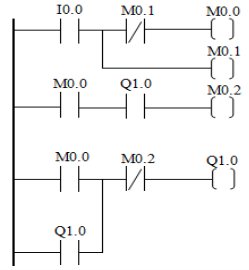
Reset0: MOV C0_L, #0 MOV C0_H, #0 CExit0: CLR C0 End0: RET 4.7.3Ӌ��(sh��)����ʼ���Ñ���Ҫ���õ���Ӌ��(sh��)���M�г�ʼ����Ӌ��(sh��)���ij�ʼ���ܺ��Σ�C�Z�Գ�ʼ���������¡� void initi_counter() { /*counter[n].PV=;*/ } �����е�n��ʹ�õ�Ӌ��(sh��)����̖��0-9)���O(sh��)��Ӌ��(sh��)����ʼֵ,���ֵ��65535�� �R���Z�Զ��r���ij�ʼ���������¡� Initi_Counter: /* MOV PVn_L, #Low MOV PVn_H, #High*/ RET ������Low=PV%256��High=PV/256�� 4.8 ���ΈD̎���������ϵĵij�����ϵ�y(t��ng)�����Ñ��Dz���Ҫ�P(gu��n)�ĵġ�ֻ�����ΈD̎���������Ñ���Ҫ�P(gu��n)ע�ġ����ΈD̎��������Ҫ�Ñ�����(j��)���ΈD������������ΈD̎�������Dz������ġ����ΈD̎���������¡� void process() { //�ȶ��x�o���^��� //�Ñ�����(j��)���ΈD�ڴ������ } �R���������£� Process: /*�Ñ�����(j��)���ΈD�ڴ������*/ RET �����eһ�����ӡ� �F(xi��n)�O(sh��)Ӌһ��ʹ��һ�����o����늙C�Ć���ͣ����һ�ΰ��Ӱ��o��늙C���ӣ��ڶ��ΰ��Ӱ��o��늙Cֹͣ�D(zhu��n)�ӡ����ΈD������D4.2��ʾ��
�D4.2 �Ñ�̎�������e��
ͨ�^�ڶ��µķ�����֪���шD4.2�D(zhu��n)�Q��C�Z�Ի��߅R���Z���Ǻ����ġ����O(sh��)��Ťʹ��X0�ӿڣ�늙Cʹ��Y0�ӿڣ�Ҋ�D2.15���� �ڌ��R���Z��֮ǰҪ�ȶ��xӳ��Ĵ������o���Ĵ����� M0_0 BIT 26H.1 M0_1 BIT 26H.2 M0_2 BIT 26H.3 �����ąR���������£� Process: MOV C, InMap0 ANL C, /M0_1 MOV M0_0, C
MOV C, InMap0 MOV M0_1, C
MOV C, M0_0 ANL C, OutMap0 MOV M0_2, C
MOV C, M0_0 ORL C, OutMap0 ANL C, /M0_2 MOV OutMap0, C
RET �������C�Z�Ԅt�������ף� void process() { bit M0_0,M0_1,M0_2; M0_0=InMap0&(~M0_1); M0_1=InMap0; M0_2=M0_0&OutMap0; OutMap0=(M0_0|OutMap0)&(~M0_2); }
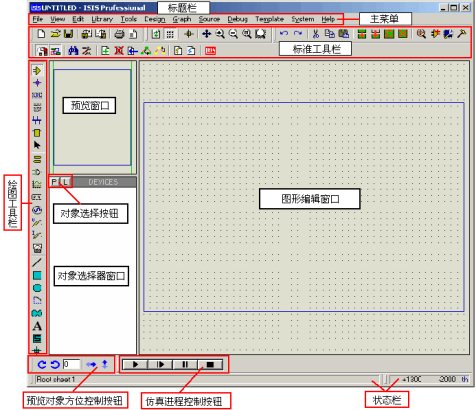
��5�� ����Proteus��ܛ������5.1 Proteus����ܛ������Proteus ISIS��Ӣ��Labcenter��˾�_�l(f��)���·�����c�������ܛ����ԓܛ����һ���Ƭ�C��SPICE������һ���ķ���ܛ�������ܘO�䏊�����\����Windows����ϵ�y(t��ng)�ϣ����Է��桢����(SPICE)���Nģ�M�����ͼ����·�� Proteus ISIS�Ĺ���������һ�N�˜ʵ�Windows���棬��D5.1��ʾ�����������}�ڡ����ˆΡ��˜ʹ��ߙڡ��L�D���ߙڡ���B(t��i)�ڡ������x���o���A�[����λ���ư��o�������M�̿��ư��o���A�[���ڡ������x�������ڡ��D�ξ����ڡ�
�D 5.1 Proteus��������
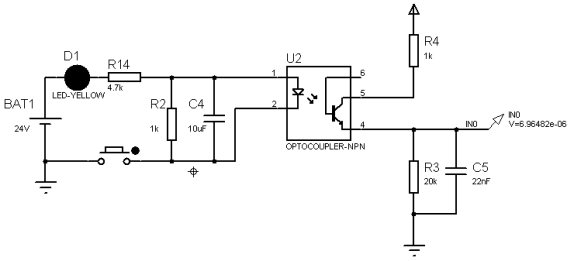
ԓܛ�������c�ǣ� ��1�����F(xi��n)�ˆ�Ƭ�C�����SPICE�·������Y(ji��)�ϡ�����ģ�M�·���桢��(sh��)���·���桢��Ƭ�C��������·�M�ɵ�ϵ�y(t��ng)�ķ��桢RS232�ӑB(t��i)���桢I2C�{(di��o)ԇ����SPI�{(di��o)ԇ�����I�P��LCDϵ�y(t��ng)����Ĺ��ܣ��и��N̓�M�x������ʾ������߉�����x����̖�l(f��)�����ȡ� ��2��֧��������Ƭ�Cϵ�y(t��ng)�ķ��档Ŀǰ֧�ֵĆ�Ƭ�C����У�68000ϵ�С�8051ϵ�С�AVRϵ�С�PIC12ϵ�С�PIC16ϵ�С�PIC18ϵ�С�Z80ϵ�С�HC11ϵ���Լ����N���оƬ�� ��3���ṩܛ���{(di��o)ԇ���ܡ���Ӳ������ϵ�y(t��ng)�о���ȫ�١��β����O(sh��)�Ô��c���{(di��o)ԇ���ܣ�ͬ�r�����^�����׃�����Ĵ����ȵĮ�ǰ��B(t��i)�������ԓܛ������ϵ�y(t��ng)�У�Ҳ��횾����@Щ���ܣ�ͬ�r֧�ֵ�������ܛ�����g���{(di��o)ԇ�h(hu��n)������Keil C51��ܛ���� ��4�����Џ����ԭ��D�L�ƹ��ܡ� 5.2���挍�5.2.1 ��ݔ���·�ķ���yԇ������C�����·�����_�ԣ��pСӲ�������ijɱ���������Proteus���M�з�����C���ڈD5.7�У���ݔ���·�е�һ·�M���˷��档��D5.2��ʾ�������I�]�а��r��D1������ݔ�뵽��Ƭ�C���_P0.0��ݔ���IN0��늉���6.96482e-6V���ǵ��ƽ��
�D 5.2 ݔ���·�yԇ1
�ڈD5.3�У����I�ѽ�(j��ng)���£�D1�l(f��)�⣬IN0�˵�늉���4.66026V���Ǹ��ƽ�� ģ�M��r�����O(sh��)Ӌ��Ҫ��
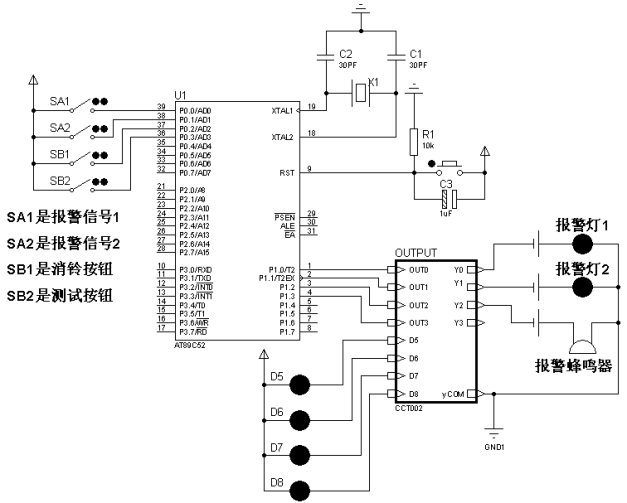
�D 5.3 ݔ���·�yԇ2 �ڷ����аl(f��)�F(xi��n)D1�����Ȳ��Ǻܸߣ�������ݔ���·������^С�ľ��ʡ�D1�Č�ͨ������2V����������10mA�� 5.2.2 ��ݔ���·�ķ���yԇ�D5.3�nj�ݔ���·�ķ���yԇ���ڈD5.9�У����_�P(gu��n)SW1�ӵ��ǣ�ֱ��늄әC�D(zhu��n)�ӣ���(w��n)���܃ɶ˵�늉���(w��n)����3.20648V����SW1�Ӹ��ƽ�r��늄әC�Dz��D(zhu��n)�ӵġ��ķ���yԇ�п�֪��ݔ���·�Ƿ����O(sh��)ӋҪ��ġ� 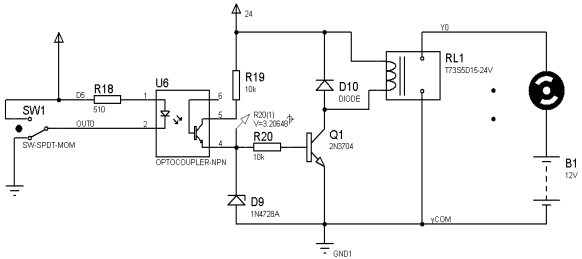 �D 5.4 ݔ���·�yԇ 5.2.3 ��·���ψ�ϵ�y(t��ng)����������C�O(sh��)Ӌ�����_�ԣ�����ͨ�^һ��������Proteusܛ���M���˷��档 ����늚��Ԅӿ����в���ȱ�ٵ����c�h(hu��n)��(ji��)����־�Ĉ��ܑ�(y��ng)ԓ�������������һ����·�����ϵ�y(t��ng)��ϵ�y(t��ng)�ķ���ԭ��D��D5.5��ʾ��ԓϵ�y(t��ng)���Ă�ݔ�룬����ݔ�����D5.5�е�OUTRUT��һ�����·�D�����溬���Ă���ͬ��ݔ���·��Ҋ�D5.6���D5.5�е�D5��D6��D7��D8��ݔ����B(t��i)ָʾ���� �D 5.5 �����ϵ�y(t��ng) �D�е�SA1��SA2�ǃɂ�����ݔ����̖�����SA1��SA2���£���ʾ���ϰl(f��)���������ϰl(f��)���Ժ����W�q��ͬ�r���Q���Q푡�SB1�ǹ��Ͻ�����o���������ˆT֪�����ϰl(f��)������SB1�����Q����ֹͣ�Q푣���ָʾ����W�q׃?y��u)鳣�������V�����ˆT��һ·�l(f��)���˹��ϡ�ϵ�y(t��ng)߀�O(sh��)����SB2�yԇ���o������ƽ�r�z�y��ָʾ���ͷ��Q���ĺÉġ� �D 5.6 ����ݔ���·
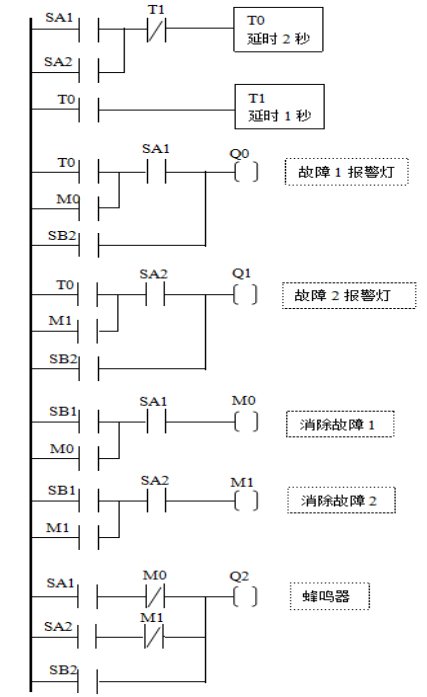
��ϵ�y(t��ng)�����ΈD������D5.7��ʾ�� �D 5.7 ��ϵ�y(t��ng)���ΈD����
����(j��)���ΈD����C�������¡� ���˷��������x������һЩ�A̎���� #define SA1 InMap0 #define SA2 InMap1 #define SB1 InMap2 #define SB2 InMap3 #define Q0 OutMap0 #define Q1 OutMap1 #define Q2 OutMap2 #define T0 timer[0].DT #define T1 timer[1].DT void initi_timer() { timer[0].K=2/0.05; timer[1].K=1/0.05; } void process() { bit M0,M1; time(0,(SA1|SA2)&(~T1)); time(1,T0); Q0=((T0|M0)&SA1)|SB2; Q1=((T0|M1)&SA2)|SB2; M0=(SB1|M0)&SA1; M1=(SB1|M1)&SA2; Q2=(SA1&(~M0))|(SA2&(~M1))|SB2;
} ����(j��)���ΈD�����R���������¡� M0 BIT 26H.0 M1 BIT 26H.1 SA1 BIT InMap0 SA2 BIT InMap1 SB1 BIT InMap2 SB2 BIT InMap3 Q0 BIT OutMap0 Q1 BIT OutMap1 Q2 BIT OutMap2
Initi_Timer: MOV K0_L, #40 MOV K0_H, #0 MOV K1_L, #20 MOV K1_H, #0 RET
Process: MOV C,SA1 ORL C,SA2 ANL C,/DT1 LCALL Tim0 MOV C,DT0 LCALL Tim1
MOV C,DT0 ORL C,M0 ANL C,SA1 ORL C,SB2 MOV Q0,C
MOV C,DT0 ORL C,M1 ANL C,SA2 ORL C,SB2 MOV Q1,C
MOV C,SB1 ORL C,M0 ANL C,SA1 MOV M0,C
MOV C,SB1 ORL C,M1 ANL C,SA2 MOV M1,C
MOV C,SA1 ANL C,/M0 MOV 26H.2,C MOV C,SA2 ANL C,/M1 ORL C,26H.2 ORL C,SB2 MOV Q2,C
RET 5.3�������Y(ji��)�����ķ��挍�����_���A�ڵ�Ч�����f��Ӳ���O(sh��)Ӌ�ͳ����O(sh��)Ӌ�ǿ��еġ� ������߀��һЩ���}��ݔ���·�ڽӆ�Ƭ�C�r����Ƭ�C���_���ܙz�y�����ƽ����˷��������˺���̎����C��������F(xi��n)��(n��i)�治��ĬF(xi��n)������������C�����Л]�а���Ӌ��(sh��)���� ����ĽY(ji��)���������^���뻯����˲����ܴ���]���e�`�����c�]������������O(sh��)Ӌ߀��Ҫ�ڌ��`�Йz���ɿ��ԡ�
��6�� ���Y(ji��)��Ƭ�C��PLC�����ڹ��I(y��)�����I(l��ng)�������V����(y��ng)�õĹ��I(y��)�����b�ã��������и��Ե����c�� ���O(sh��)Ӌ��AT89C52��Ƭ�C�O(sh��)Ӌ��һ��4ݔ��4ݔ���ĺ���PLC��ԓPLC����10�����r����10��Ӌ��(sh��)����ÿ�����r�������L���r�r�g��3276.75�룬ÿ��Ӌ��(sh��)�������Ӌ��(sh��)ֵ��65535��ԓPLC��ݔ�뷽ʽ��ֱ���_�P(gu��n)����ݔ��늉���24V��ݔ�������^���ݔ����ʽ���^������~��늉���DC24V�����������2A����Ȧ���ʞ�4W���������ϵ�y(t��ng)�Ŀ��ɔ_������ݔ��ݔ���·�ж�ʹ���˹���������ԓPLC�����cӋ��ͨӍ������������Ӌ��C�����d���� ��K�����ԭ��D��PCB�D���L�ƣ�Ҳ���O(sh��)Ӌ�����_��ͨ�^Proteus�����M������C�� ������ĽY(ji��)���������^���뻯����˲����ܴ���]���e�`�����c�]������������O(sh��)Ӌ߀��Ҫ�ڌ��`�Йz���ɿ��ԡ� ���O(sh��)Ӌ�r�����˺����O(sh��)Ӌ���]����չ��Ƭ�C��(n��i)�棬���ΈD���������s�r����C�Z�Ծ����ij���������������(n��i)����g�����O(sh��)Ӌ�ڳ����Л]�����\��ܡ���һЩ���εĿ��ƣ��ڷ���r���O(sh��)Ӌ�ǿ��еġ������ܝM����s�Ŀ�����Ҫ���ڹ�����߀�����M����չ�� - ����ݔ�ˡ�ݔ�����c�Ĕ�(sh��)����
- ���Ӳ�ͬ��ݔ�뷽ʽ��ݔ����ʽ��
- ���m��(y��ng)���I(y��)�h(hu��n)����Ҫ��, ��Ҫ�ИO��ɿ��Ŀ��ɔ_��ʩ��
3.�Ӵ�ؓ�d����, �ԝM�㹤�I(y��)���ƌ����һ����Ҫ�� 4.����̎��ģ�M��������, �ԝM��ģ�M���Ŀ����Ҫ�� 5.����ͨӍ����, �ԝM�����ϵ�y(t��ng)�W(w��ng)�j(lu��)����Ҫ�� 6.��չ��Ƭ�C�ă�(n��i)�棬ʹ������PLC�܉��\�и��ӏ��s�ij��� 7.���Ӹ����S�����˙C�ӿڣ�����ܱP�A�ó���ݔ���A��ֵ��LCD�@ʾ������B(t��i)�ȡ� ����ܛ���ĔU��, ����r�g��Ȼ���L, ���Ծ�Ҫ����\���١�����Ӳ���ĔU��, �w�e��Ȼ����,���Ҫ�к����ĽY(ji��)��(g��u)��Ӳ�����س���ܵ����ӣ���ܛ���O(sh��)Ӌ����˸��ߵ�Ҫ��ܛ��ϵ�y(t��ng)Ҫ���Ӻ����� �Æ�Ƭ�C����PLC������һ���о��������_�l(f��)��һ�N�����ΈDֱ���D(zhu��n)���Ɇ�Ƭ�C�Ɉ�(zh��)�еĶ��M���ļ���ܛ�����@���Ñ�ֻ��Ҫ����(j��)������Ҫ���O(sh��)Ӌ���Լ������ΈD����Ȼ��ֱ�Ӱ����ΈD����ͨ�^ܛ���D(zhu��n)�Q�ɶ��M���ļ����Ñ�����Ҫ��C�Z�Գ�����߅R�������@��һ��ֵ���о����n�}��
���x�ڮ��I(y��)Փ�ļ������֮�H����Ҫ���ĸ��x��Ӣ���ώ��ڮ��I(y��)�O(sh��)Ӌ���g�o���ָ���͎��������ώ�������æ������Ȼʮ���P(gu��n)���҂��Į��I(y��)�O(sh��)Ӌ��ÿ�ܶ�����r�gϤ��ָ���҂������ώ��Y����֪�R�͇�֔?sh��)Ĺ������L�����Ӱ����ҡ� ͬ�rҲҪ���x��W���g���е����n�ώ����������ڵ�֪�R���Ҵ�W���g�@�õČ��Fؔ����
���A ϵ�y(t��ng)ԭ��D
B ϵ�y(t��ng)PCB�D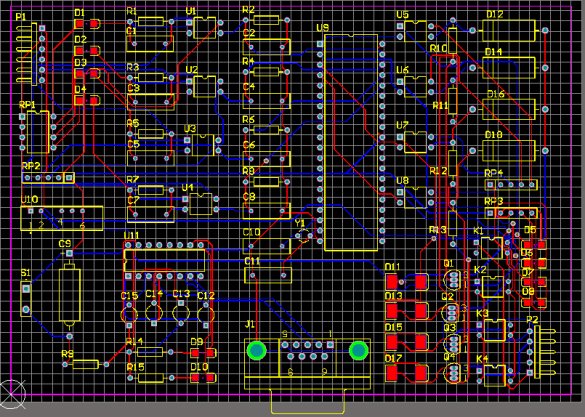
ȫ���Y��51hei���d��ַ��
 ��Ƭ�C����PLC.rar
(635.07 KB, ���d��(sh��): 47)
��Ƭ�C����PLC.rar
(635.07 KB, ���d��(sh��): 47)
2018-11-5 08:30 �ς�
�c���ļ������d����
���d�e��: �ڎ� -5
| 




 ����TQQ:125739409;���g(sh��)����QQȺ281945664
����TQQ:125739409;���g(sh��)����QQȺ281945664






 QQ���Ѻ�Ⱥ
QQ���Ѻ�Ⱥ QQ���g
QQ���g �vӍ��
�vӍ�� �vӍ����
�vӍ���� �ղ�
�ղ� ����
���� �
� ��
��